1. Introduction
The active four-wheel-steering (4WS) system is studied widely to improve the handling stability at high speeds, and the maneuverability at low speeds. With the emergence of intelligent vehicle systems (IVS), the 4WS system can also be used to solve the path tracking problem to ensure that the vehicle can follow the scheduled route, and its algorithm is mainly about determining the required steering angle to adjust the dynamic turning point on the road curvature center [
1,
2,
3]. Hitherto, some control strategies and methods have been proposed to improve the aforementioned control goals, such as fuzzy, adaptive, feedforward, feedback, optimal, H
∞, sliding mode, decoupling, and neural network controls, as well as
μ synthesis.
A yaw stability controller based on fuzzy logic was proposed, which took the yaw angular velocity error, steering angle given by driver, and side slip angle as input, calculated the additional steering angle as output, and compared with the existing fuzzy control system with two inputs of the yaw angle and yaw angular velocity. The results showed that the proposed fuzzy yaw controller had better performance [
4]. Considering the rear wheel steering resistance moment, the H
2/H
∞ mixed robust controller was designed to track the desired yaw rate, and can be obtained according to the variable transmission ratio strategy [
5]. Applying the yaw rate tracking strategy to the 4WS vehicle and considering the resistance moment of rear wheel steering, the H
2/H
∞ infinity hybrid robust controller was designed and the stability control of 4WS vehicle was studied [
6]. A
μ synthesis robust controller was designed to overcome the model uncertainty [
7]. Considering the velocity changing, a linear parameter varying (LPV) controller was designed to improve the handling stability, safety, and comfort of the 4WS vehicle [
8]. A high-level control redistribution method based on LPV control framework was adopted to realize torque vectorization and steering, which can ensure the speed and path tracking of the four-wheel independently-actuated (4WIA) vehicle in the case of one or even several wheeled motor failures or performance degradation [
9]. Using the preview theory, robust theory, and adaptive path following, the 4WS vehicle can exhibit a good path tracking capability in both the longitudinal and lateral directions [
10]. Based on the singular boundary theory and Lyapunov stability theory, the uncertainty of the 4WS vehicle was debated [
11]. Combined with the linear programming algorithm and the improved sliding mode algorithm, a joint control strategy combining the exponential reaching law with the saturation function was proposed. The strategy can control the side slip angle, yaw speed, and yaw moment of the vehicle well to improve the handling and stability performance of the vehicle significantly [
12]. Based on sliding mode control, an integrated control system with 4WS and direct yaw moment control (DYC) was proposed to improve vehicle handling stability [
13]. A fast terminal sliding mode controller was designed to suppress the external disturbance of the steer-by-wire (SBW) system. Considering the unstructured and structural uncertainties, a robust controller was designed by using the synthesis method; the controller order reduction was realized based on Hankel-Norm approximation, and the extended Kalman filter was used to estimate the sideslip angle [
14].
In addition, relative investigations have shown that the decoupling control of the vehicle steering characteristics can improve the vehicle’s safety, driving, and even exhibit accurate trajectory tracking because of the vehicle’s individual control of the lateral and yaw motions [
15]. A robust triangular decoupling control strategy was proposed to decouple the front axle acceleration from the yaw rate [
16]. A lateral-force observer based on the disturbance observer theory was developed, aiming to overcome the fragile robustness of the decoupling control for road conditions, and used along with the yaw-moment observer in a small-scale electric vehicle. Further, the robustness against parameter variation was improved [
17]. The necessary and sufficient conditions for the solution of diagonal decoupling were presented, and the vehicle model (lateral plus roll dynamics) was implemented to control the steering angle and sideslip angle of the vehicle independently, using a static state feedback law with a static pre-compensator [
18]. An asymptotic decoupling control for the 4WS vehicle based on an easy measurement feedback was introduced. Its control inputs were the front wheel steering angle, and the torques of front and rear wheels; further, the H∞ optimization method was used to derive the desired eigenvalues [
19]. Pre-compensation decoupling with H
∞ performance control for a 3DOF nonlinear 4WS vehicles was studied to consider the influence of disturbances on the output under the H
∞ index. The results showed that the longitudinal velocity, lateral velocity, and yaw rate can be controlled independently, and the drivers can steer rapidly [
20]. A simple decoupling subsystem consisting of longitudinal, lateral, and yaw dynamics is derived by choosing the combination of longitudinal acceleration/braking force and steering angle of front and rear wheels as the virtual control input [
21].
However, compared with diagonal decoupling, triangular decoupling is more complicated, particularly for uncertain systems [
22]. Further, it is difficult to build fuzzy rules in all situations for fuzzy control algorithms, and the adaptive control is suitable for the slow time-varying system that is vastly different from the actual steering system whose parameters may change quickly [
23]. In addition, the control strategies for a 4WS system can be divided into two types: one is to make the sideslip angle zero, corresponding to trajectory preserving problem, the other one is to track the desired yaw rate. Most studies on the control of 4WS vehicles usually aim to determine the rear wheel steering angle based on the certain front wheel steering angle, and compare the response of 4WS vehicle under the inputs of the front and rear wheel steering angles with that of the 2WS vehicle.
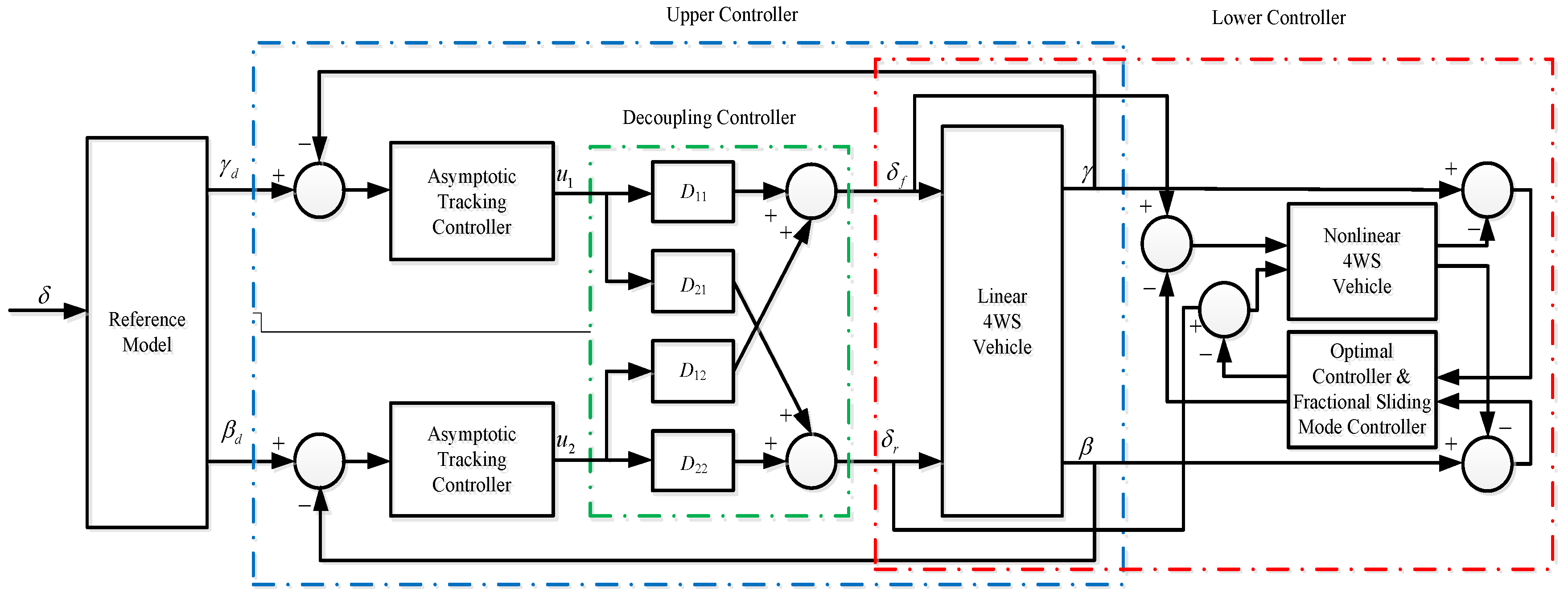
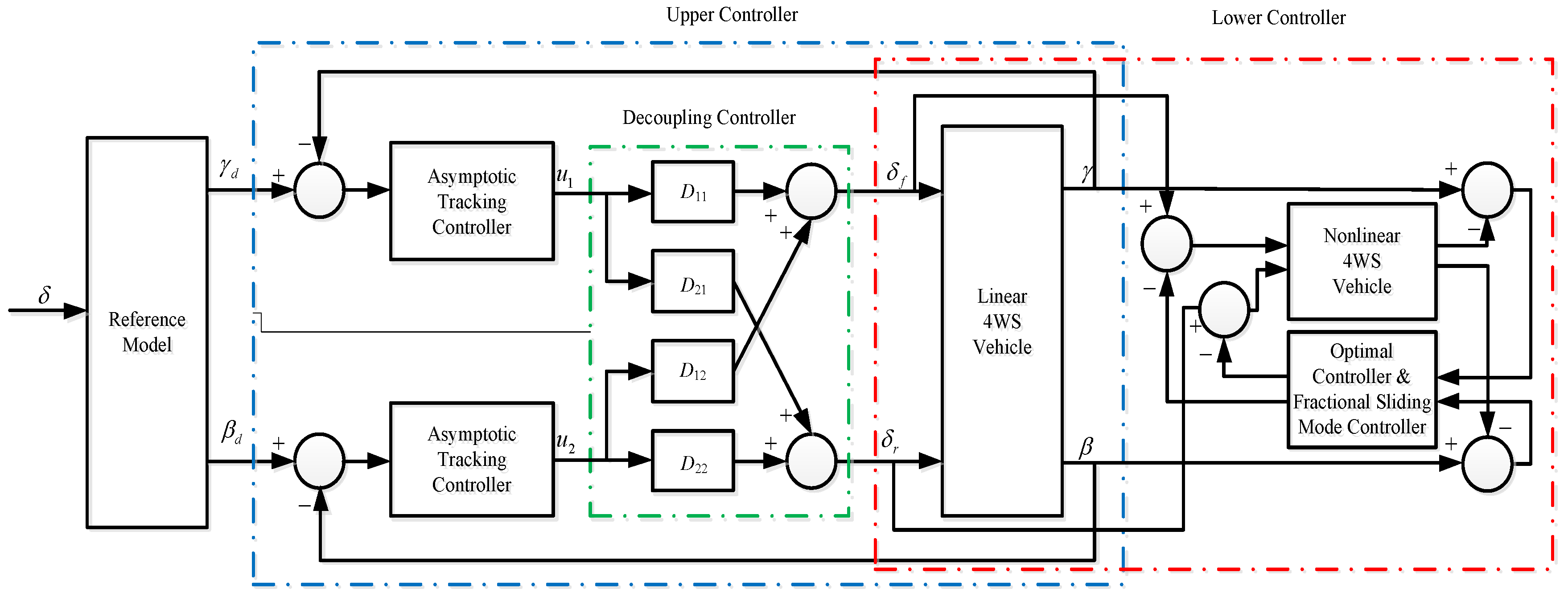
The novelties of this study are as follows: (1) The reference model is obtained by filtering the sideslip angle of a normal 2WS vehicle, which is very different from past practices. (2) According to the 2WS reference model, the front and rear wheel steering angles of linear 4WS vehicle are determined simultaneously by the decoupling controller, and its response is consistent with that of the 2WS reference model completely. (3) Considering that it is very difficult to design controllers directly by using nonlinear models, a new hierarchical controller is proposed in this paper. Firstly, the upper controller controls the linear 4WS model to have the same response as the 2WS reference model. Then the lower controller controls the nonlinear 4WS model to have exactly the same response as the linear 4WS. (4) The upper control strategy, including the decoupling controller and asymptotic tracking controller, is designed to provide the standard input for the linear 4WS vehicle model. The former is to decouple the sideslip angle and yaw rate from each other, which can obtain the required front and rear wheel steering angles. The latter is to control the linear 4WS vehicle model to track the reference model completely. (5) The lower control strategy, including the optimal controller and fractional sliding mode controller, is designed to remove the adverse effects of the state errors between the linear 2DOF and nonlinear 3DOF 4WS vehicle models. The former is to eliminate the state error caused by the different initial states. The latter is to eliminate the state error caused by the uncertainty.
The subsequent parts of this paper are organized as follows: In
Section 2, the vehicle models, including the nonlinear 3DOF 4WS/2WS model, the linear 2DOF 4WS/2WS model, and the reference model are presented. The hierarchical control strategies, including the upper control strategy (i.e., the decoupling and the asymptotic tracking control) and the lower control strategy (i.e., the optimal control and the fractional sliding mode control), are described in
Section 3. The comparison of the simulation results of the linear 2DOF 2WS vehicle, reference model, nonlinear 3DOF 2WS vehicle, real vehicle with the hierarchical controller and linear 4WS with linear quadratic regulator (LQR) controller are reported in
Section 4. Finally, the conclusion is summarized in
Section 5.
4. Simulation Analysis
The nominal vehicle parameters and five different parameter groups of the real 4WS vehicle are summarized in
Table 1 and
Table 2, respectively. Assuming that the real 4WS vehicle (represented herein by the nonlinear 3DOF 4WS model) traverses on a road with the adhesion coefficient of 0.8, its partial parameters (
m = 1700 kg,
Iz = 4100 kgm
2) and initial state of state variable (
) are slightly different from those of the linear 2DOF 4WS vehicle (
m = 1818.2 kg,
Iz = 3885 kgm
2,
). The system input is the step input of the front wheel steering angle with amplitude 0.045 rad. The saturation values of the front and rear steering angles are
rad,
rad, respectively.
The linear 2DOF 2WS vehicle, reference model, nonlinear 3DOF 2WS vehicle, real 4WS vehicle with the hierarchical controller, and linear 2DOF 4WS vehicle with LQR controller are simulated with the same front wheel steering angle; their response curves are shown in
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7 and
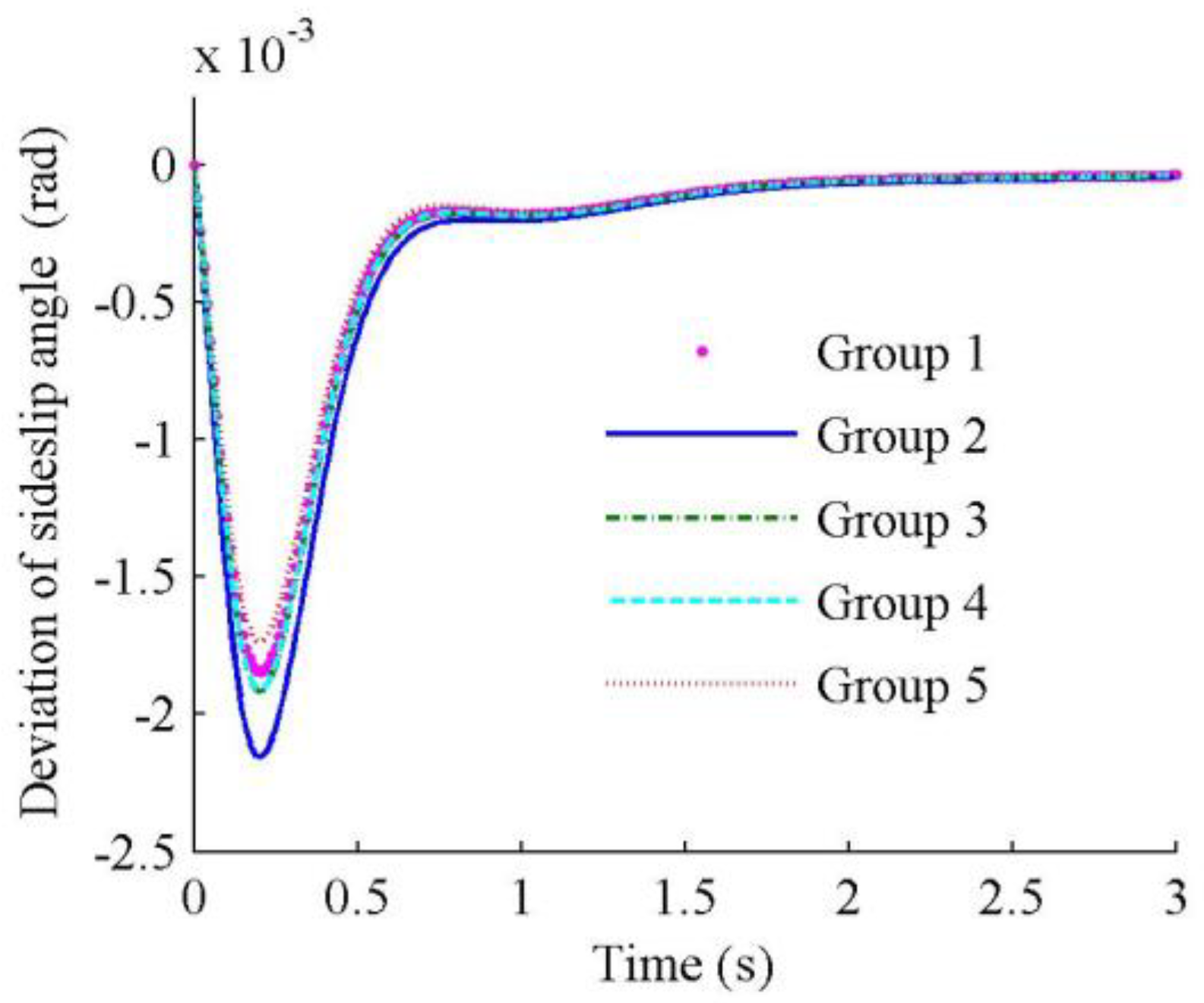
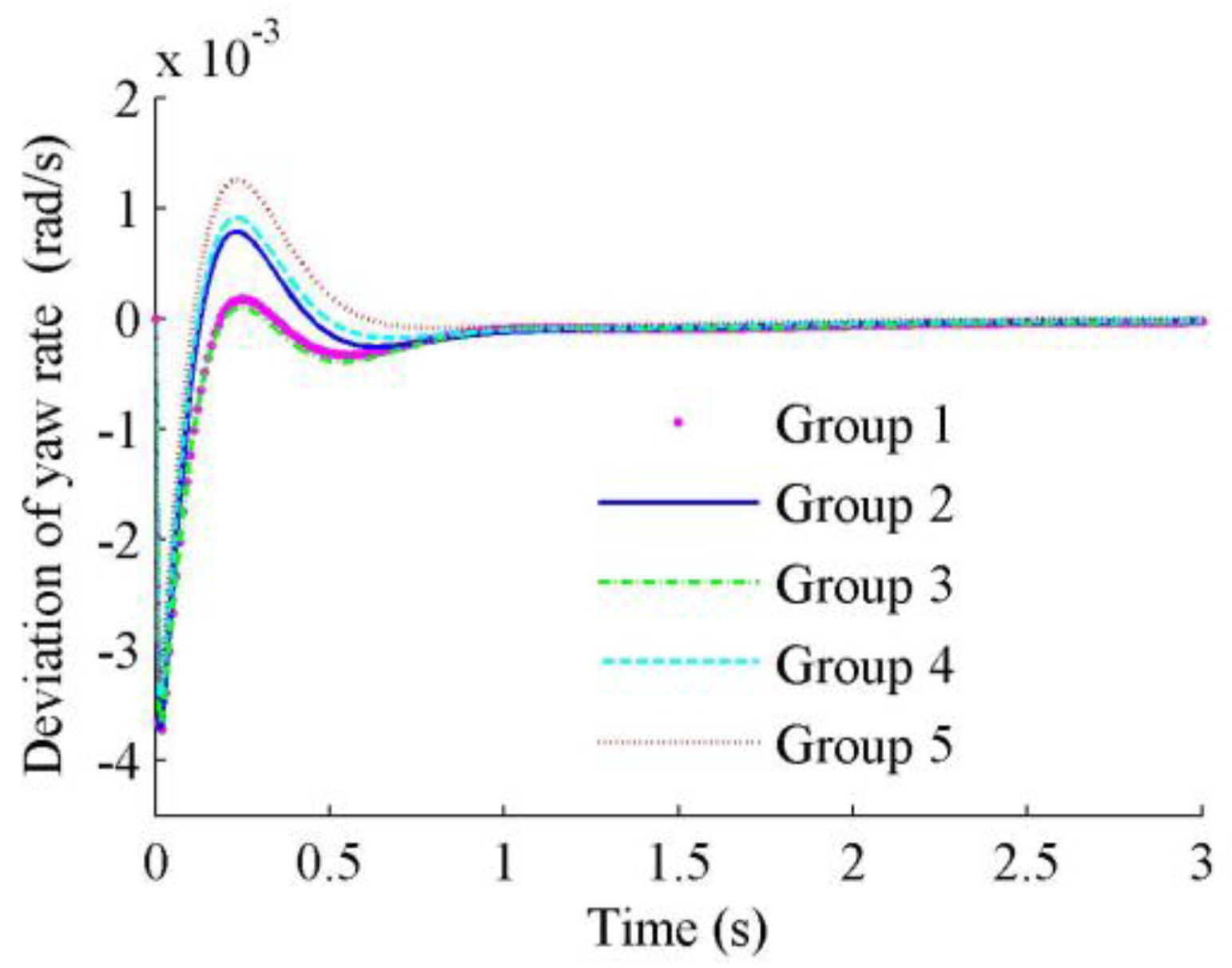
Figure 8. To investigate the robustness of the hierarchical controller system, five different groups of vehicle parameters are used in the simulation, and their deviations in yaw rate and sideslip angle from those of the real 4WS vehicle with the nominal parameters are shown in
Figure 9 and
Figure 10.
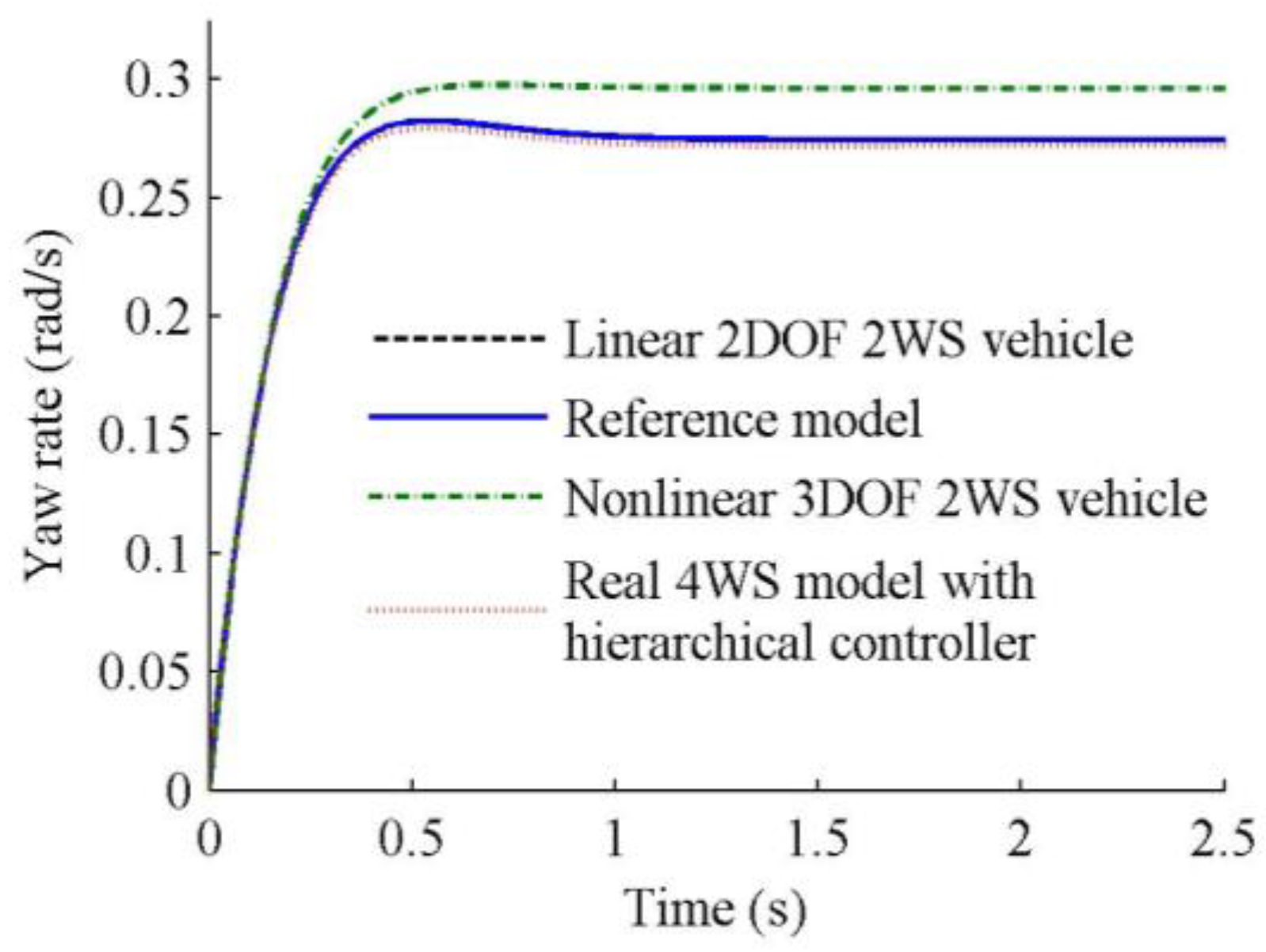
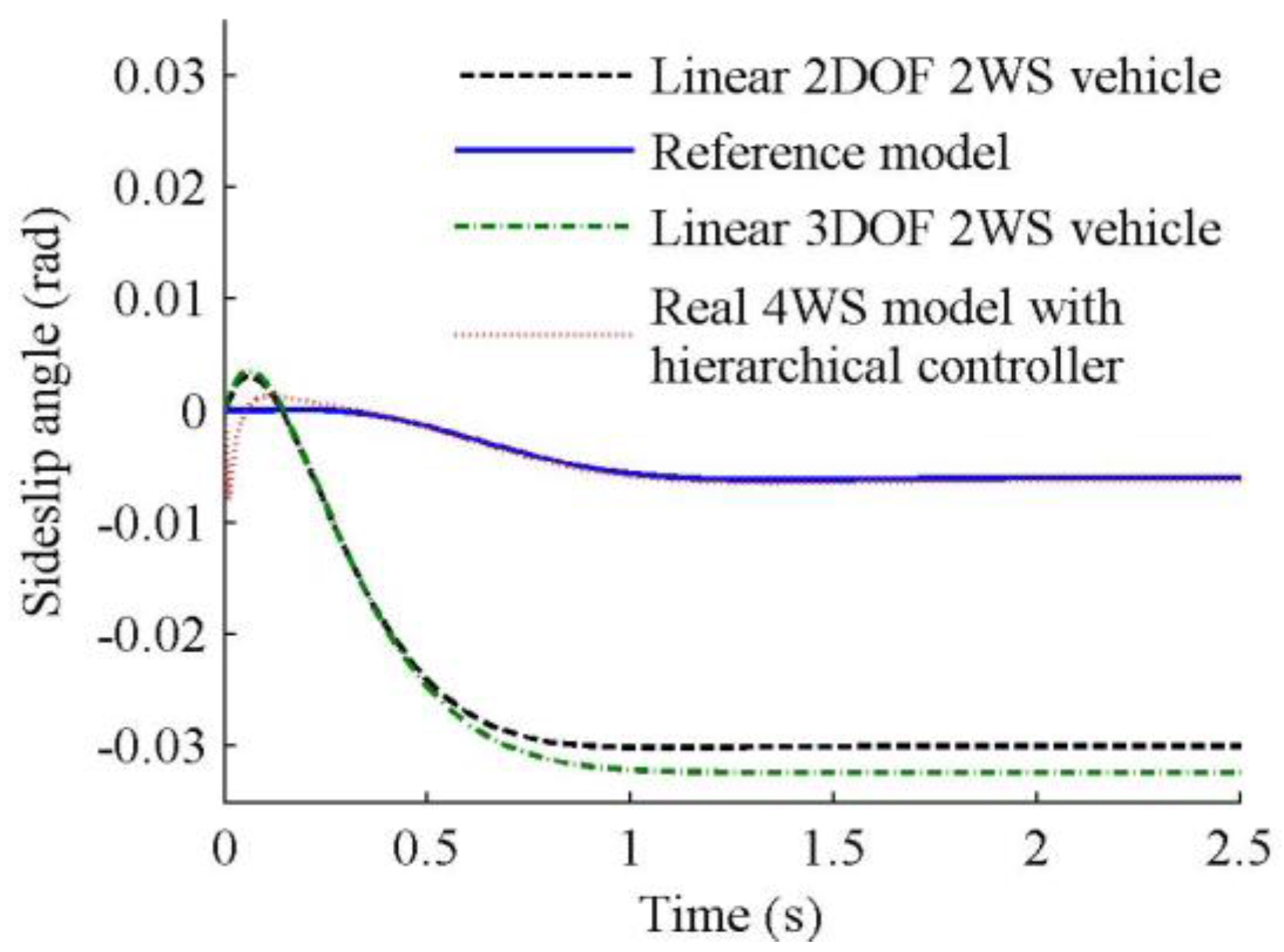
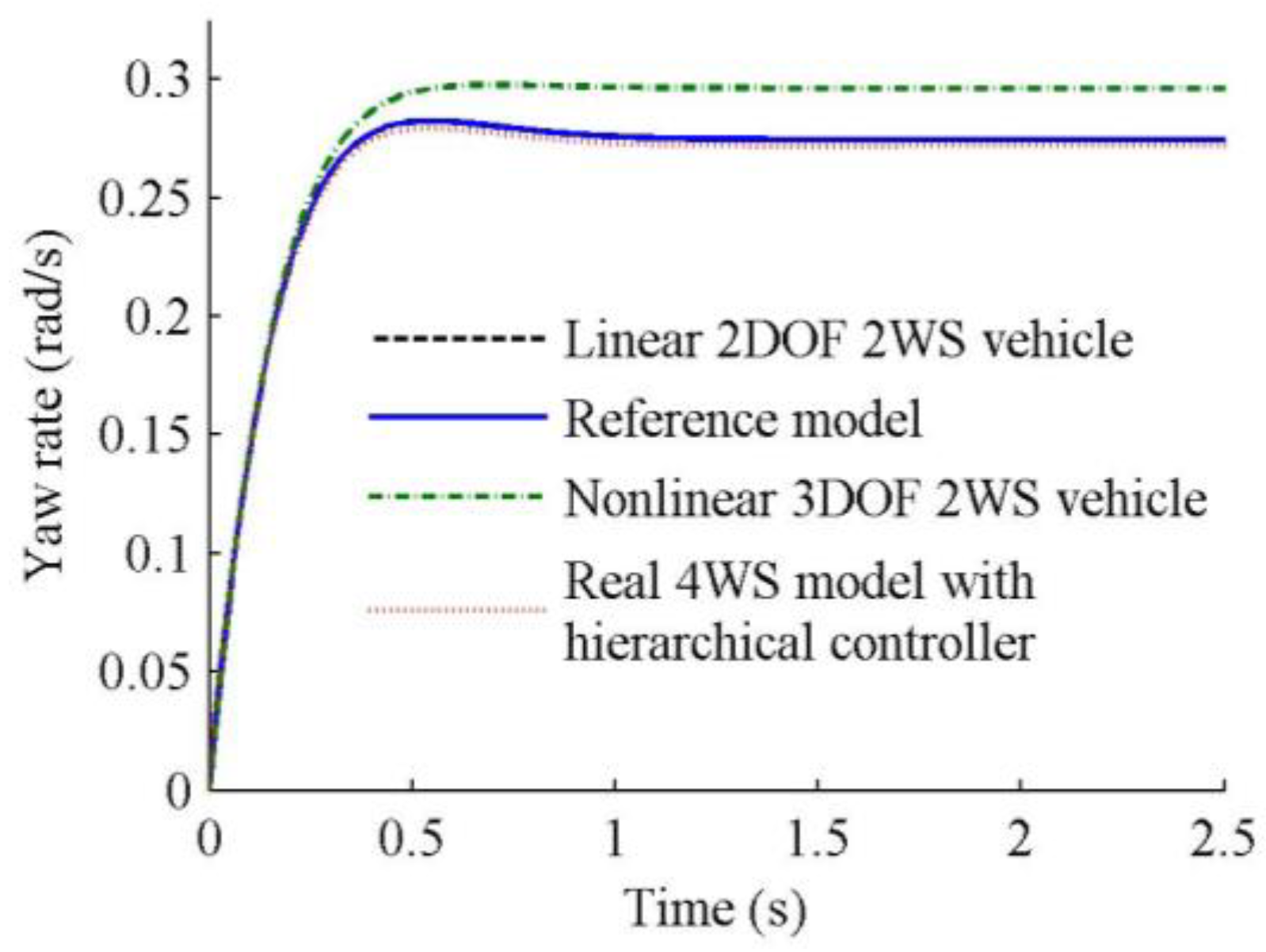
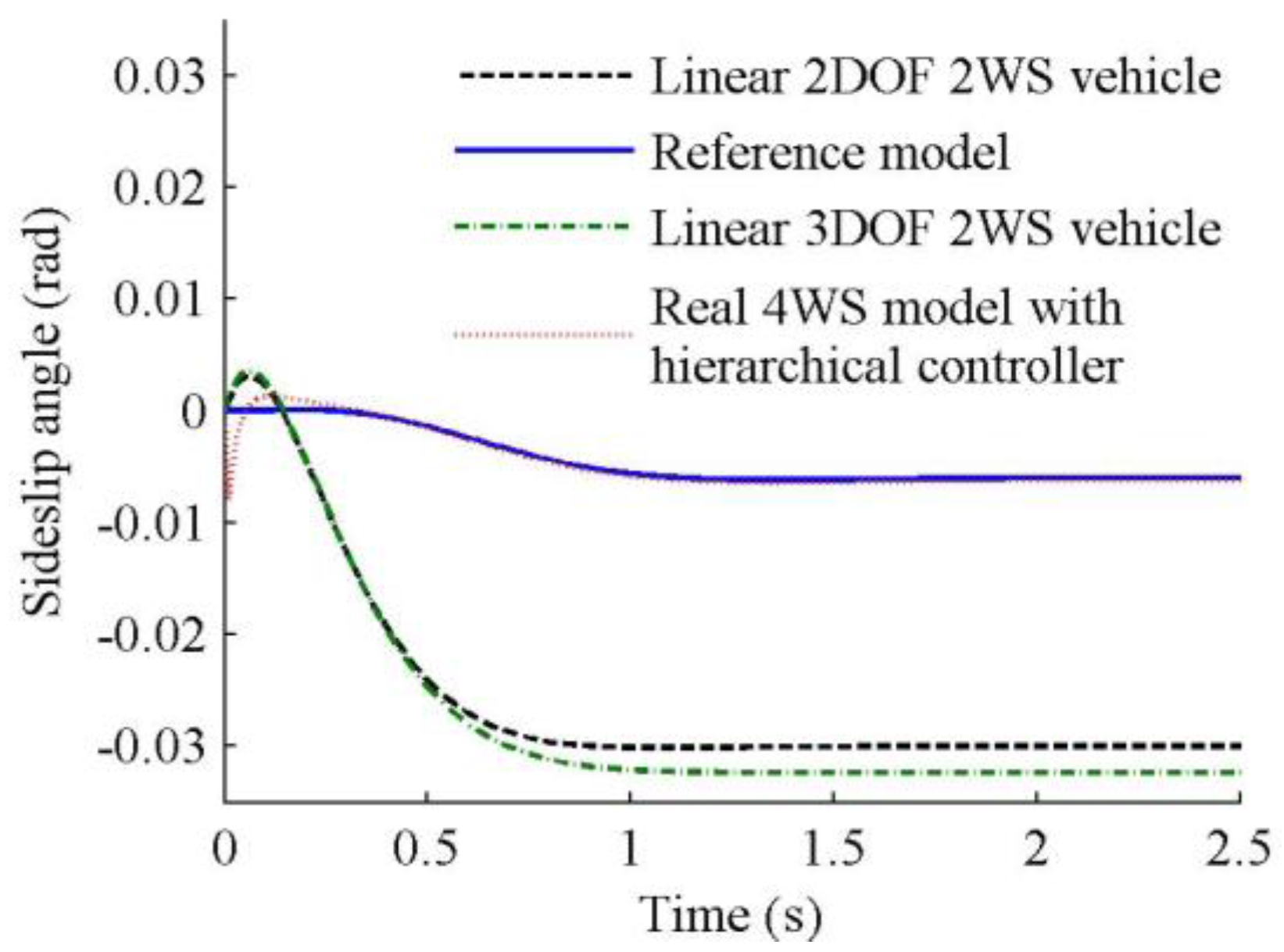
As shown in
Figure 3 and
Figure 4, the steady-state values of both the yaw rate and sideslip angle of the linear 2DOF 2WS vehicle, and those of the nonlinear 3DOF 2WS vehicle are different from each other. In particular, their steady-state values of sideslip angle are far from that of the reference model. This is because the nonlinear 3DOF 2WS vehicle considers the roll motion, and the reference model is obtained by filtering the sideslip angle of the linear 2DOF 2WS vehicle, which can also be adjusted according to the driving condition, such as the mass and speed of the vehicle. In addition, at the very beginning, the value of sideslip angle of the real 4WS vehicle with the hierarchical controller exhibits little fluctuation. However, their steady-state values of yaw rate and sideslip angle are almost exactly the same as the reference model. This is because both the partial parameters and the initial state are not the same, and the nonlinear 3DOF 4WS vehicle requires extra consideration for the roll motion.
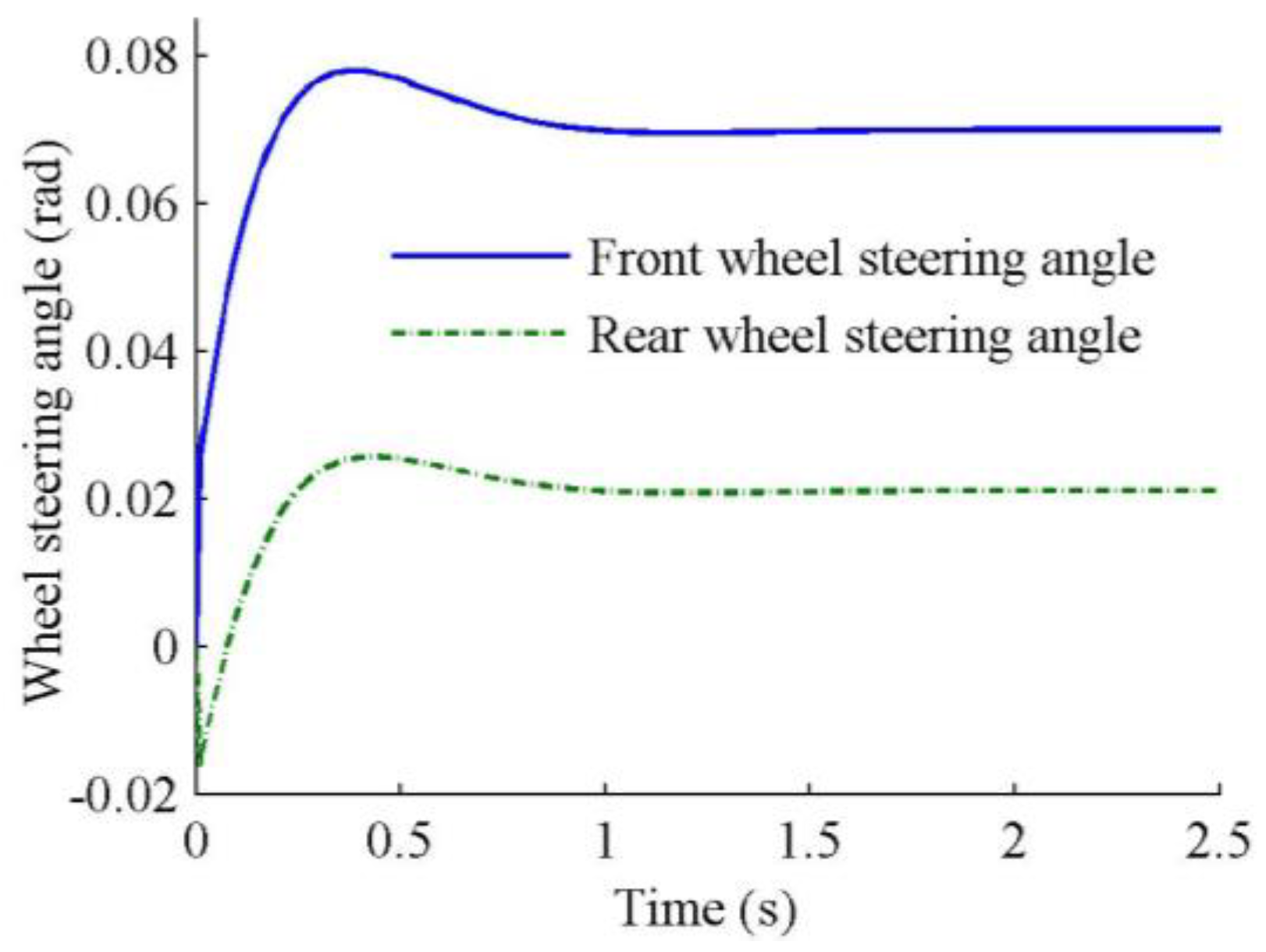
It can be drawn from
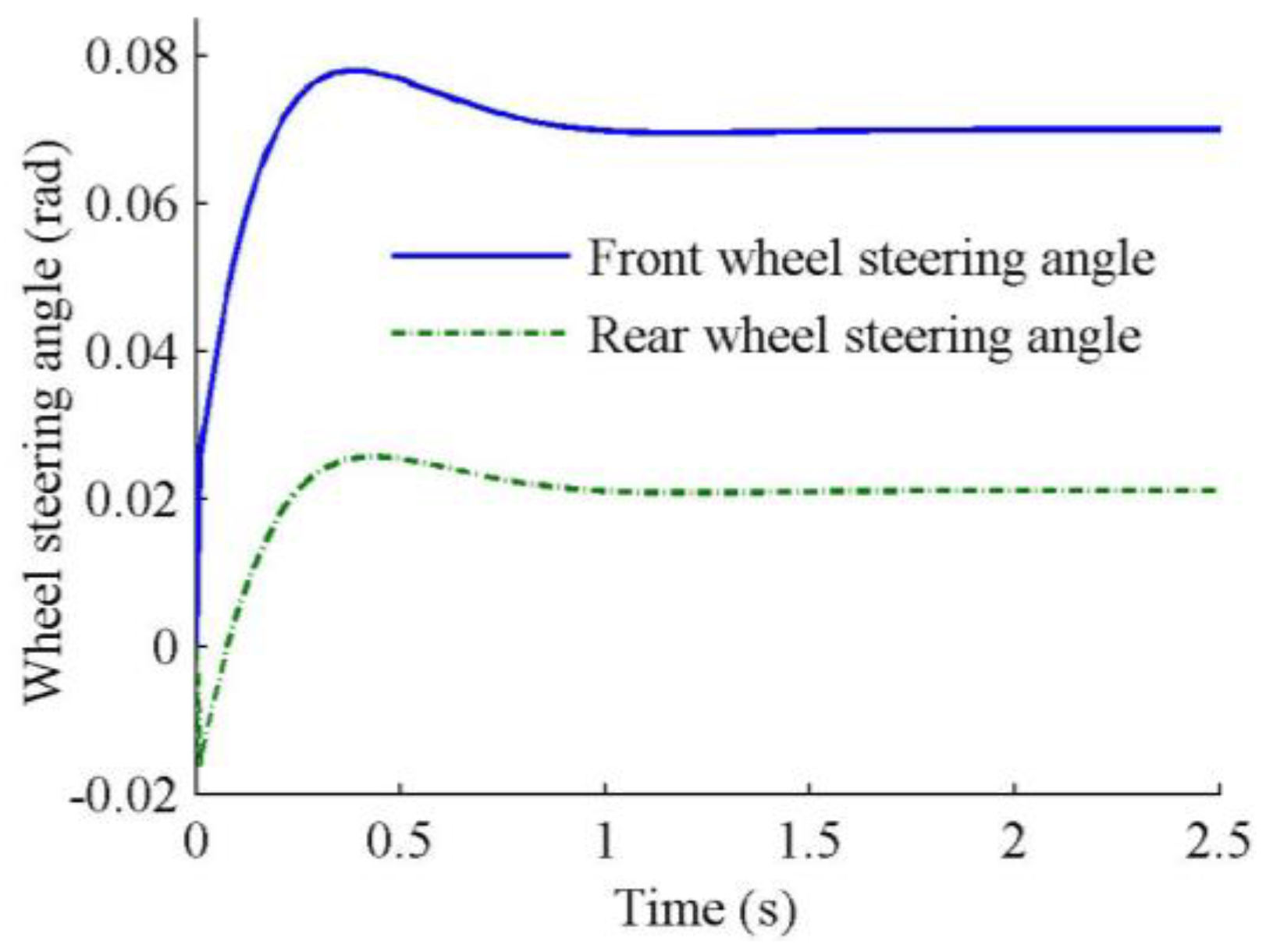
Figure 5 that front and rear wheel steering angles of the real 4WS vehicle with hierarchical controller are 0.0698 rad and 0.0215 rad, respectively, which are less than the saturation values. Further, the front and the rear wheels rotate in the same direction, thus fully meeting the requirement of the handling stability at high speed. In addition, it also indicates that although the input of the hierarchical control system is only the front wheel steering angle, the proper front and rear wheel steering angles are obtained by the hierarchical controller. Specifically, the actual front and rear steering angles come from two parts: one is the standard input achieved by the upper controller of the 4WS vehicle, the other is the corrected value obtained by the lower controller to eliminate the uncertainty influence.
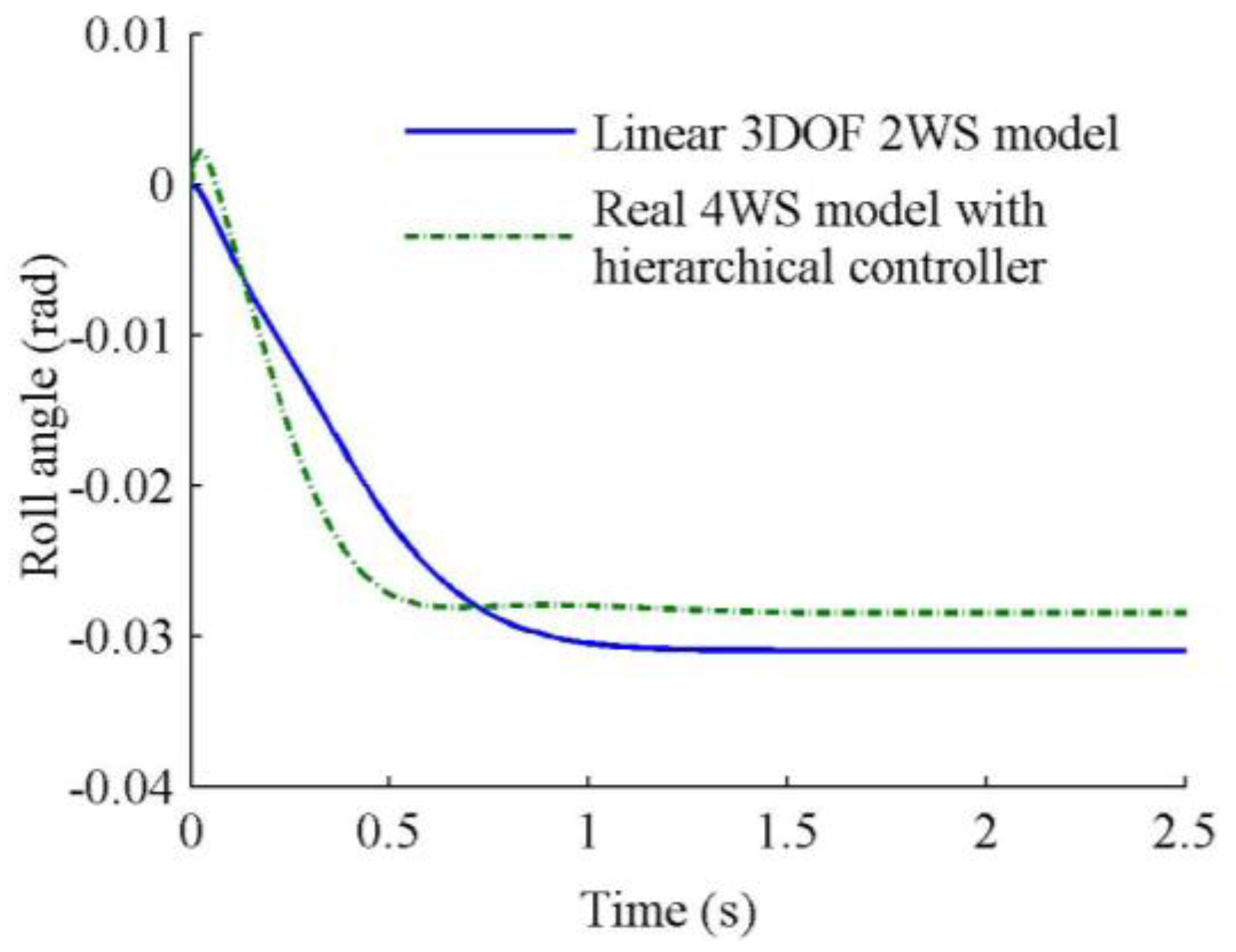
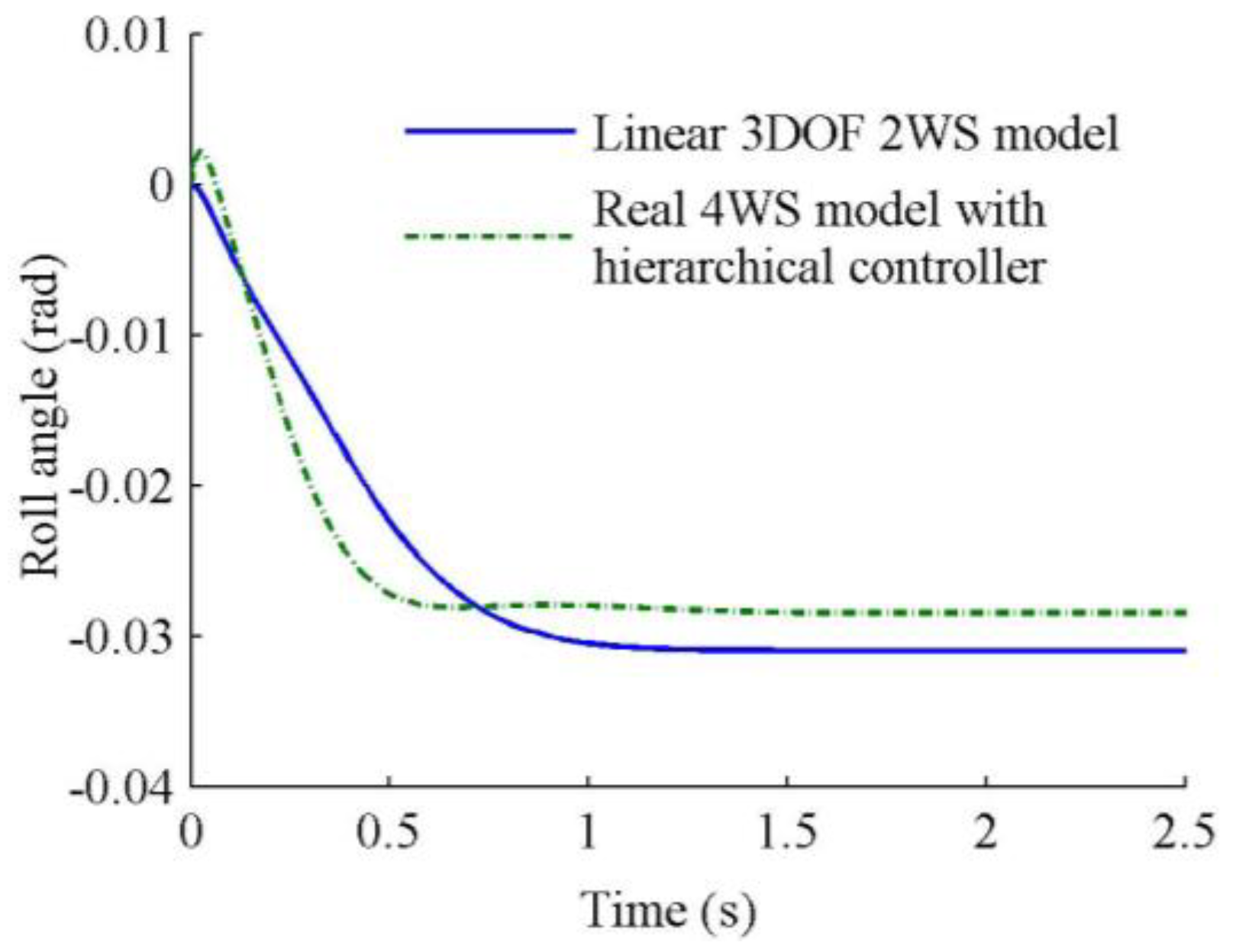
Figure 6 shows that the roll angles of the nonlinear 3DOF 2WS vehicle and the real 4WS vehicle with hierarchical controller are −0.031 rad and −0.0285 rad, respectively, thus indicating that the roll angle of the rear 4WS vehicle decreases to a certain extent by adopting the hierarchical controller, and its handling stability is improved compared with the nonlinear 3DOF 2WS vehicle.
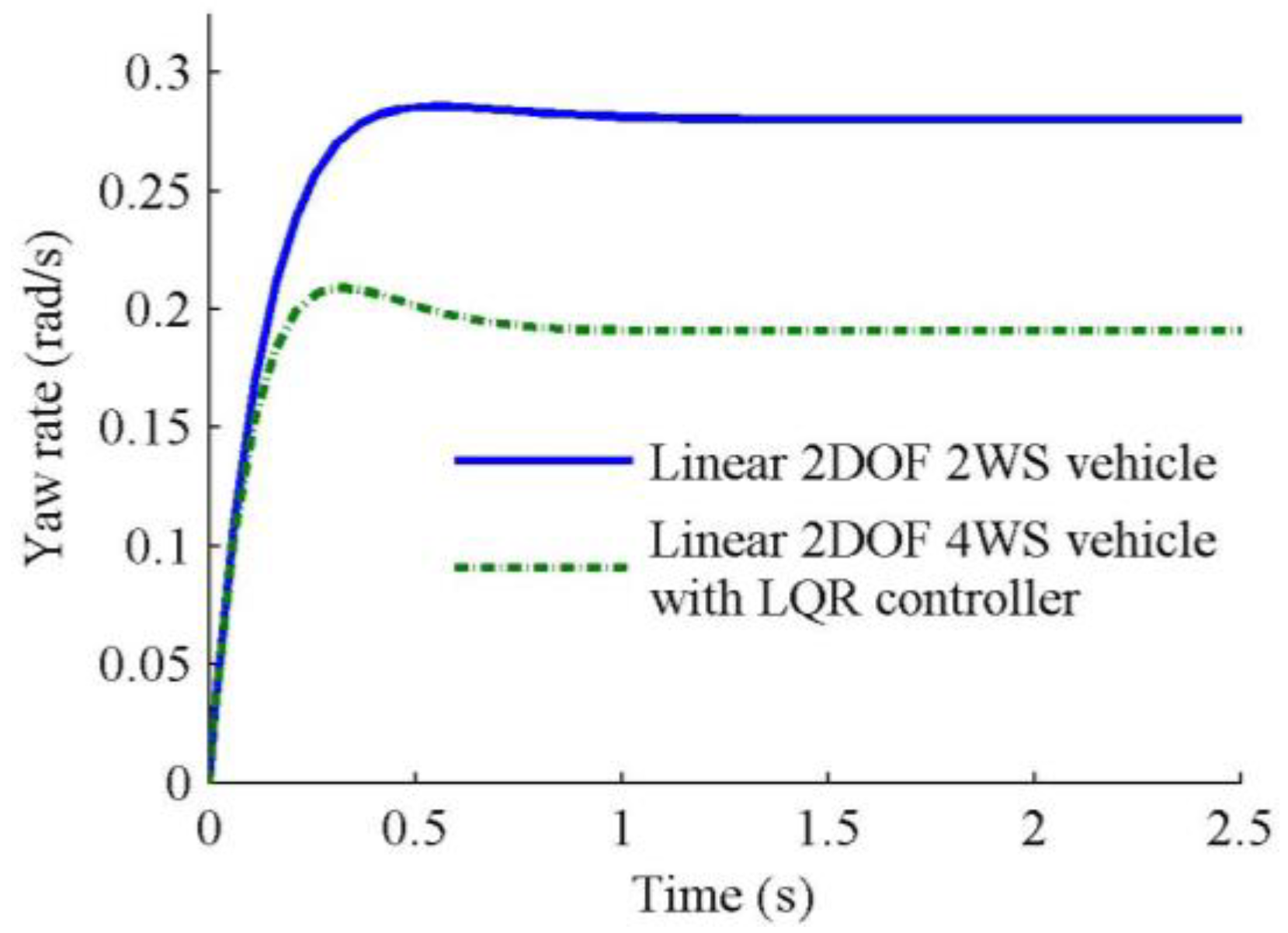
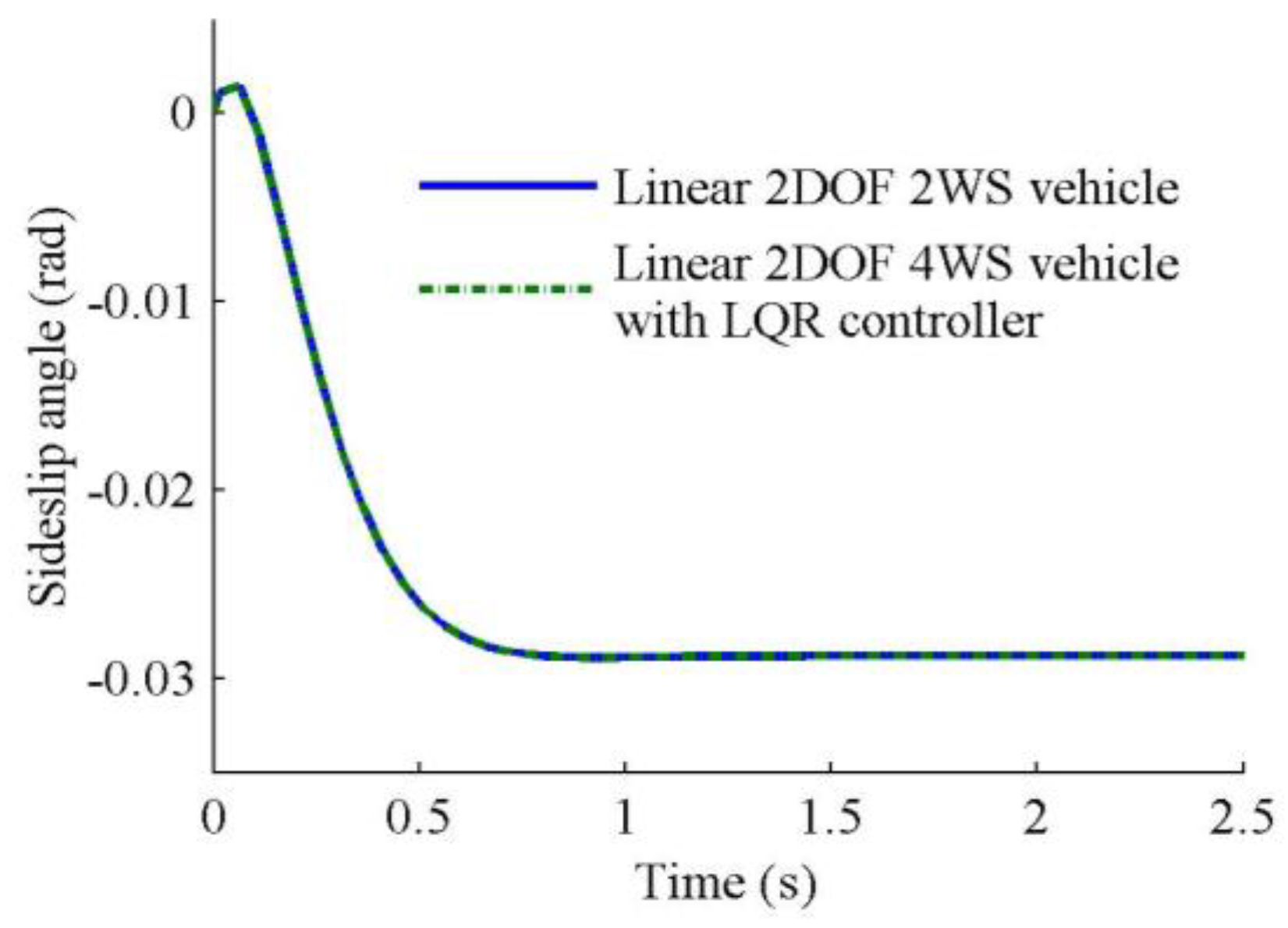
It can be seen from
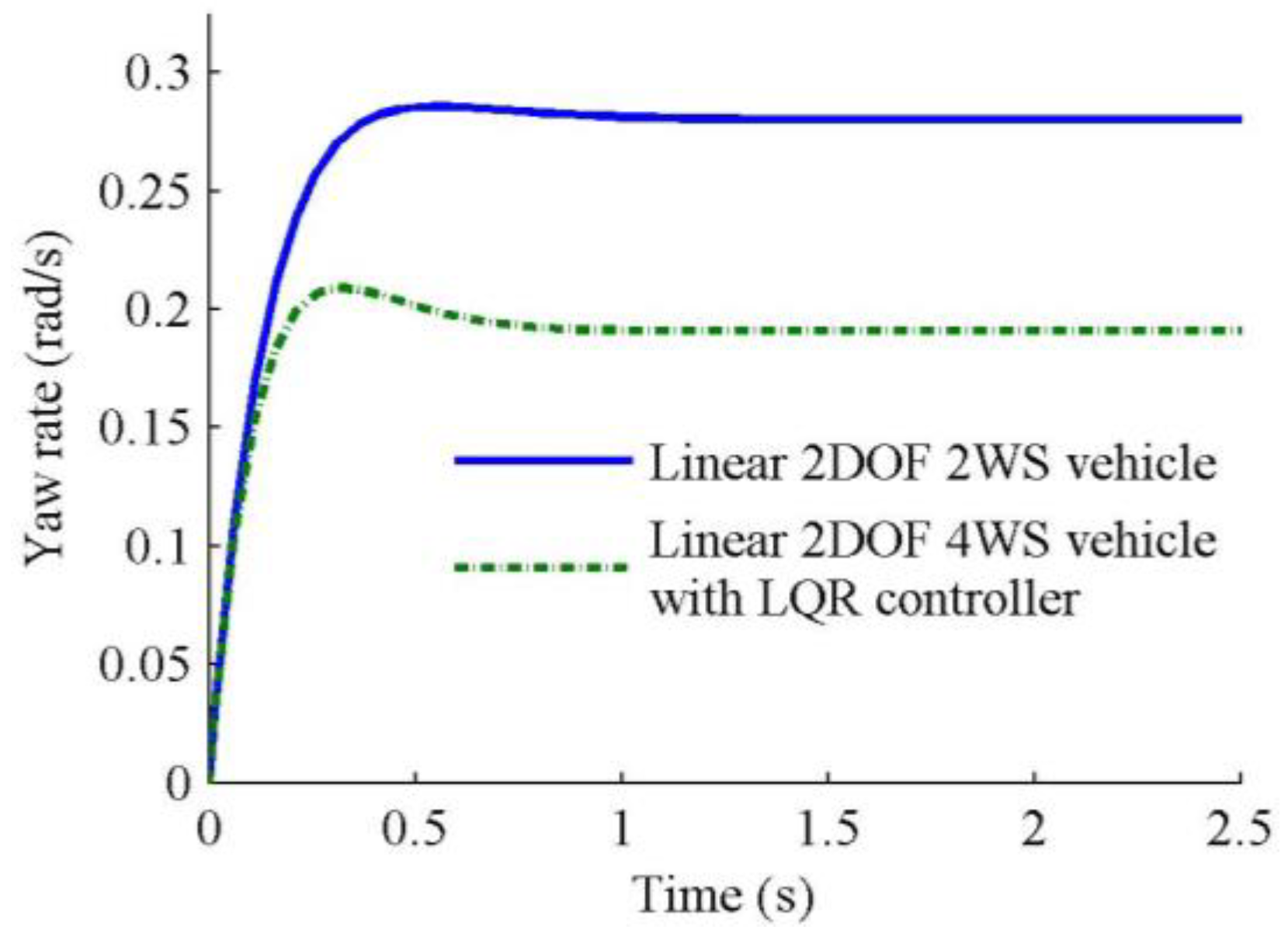
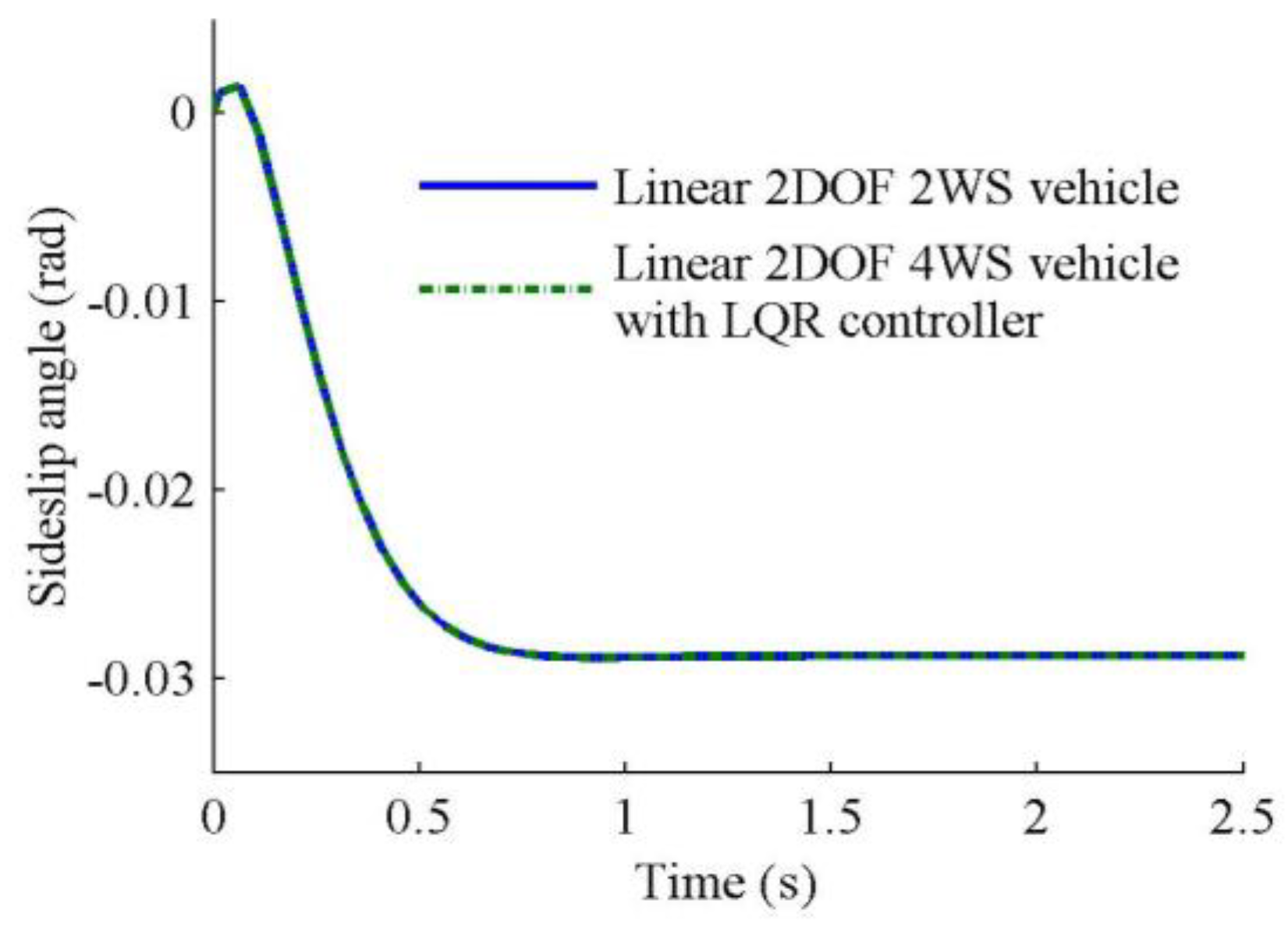
Figure 7 and
Figure 8 that the yaw rate of the linear 2DOF 4WS vehicle with LQR controller can track that of the linear 2DOF 2WSvehicle, but the sideslip angle of the former cannot track that of the latter. Thus the upper controller of the hierarchical control strategy is effective to track both the yaw rate and sideslip angle.
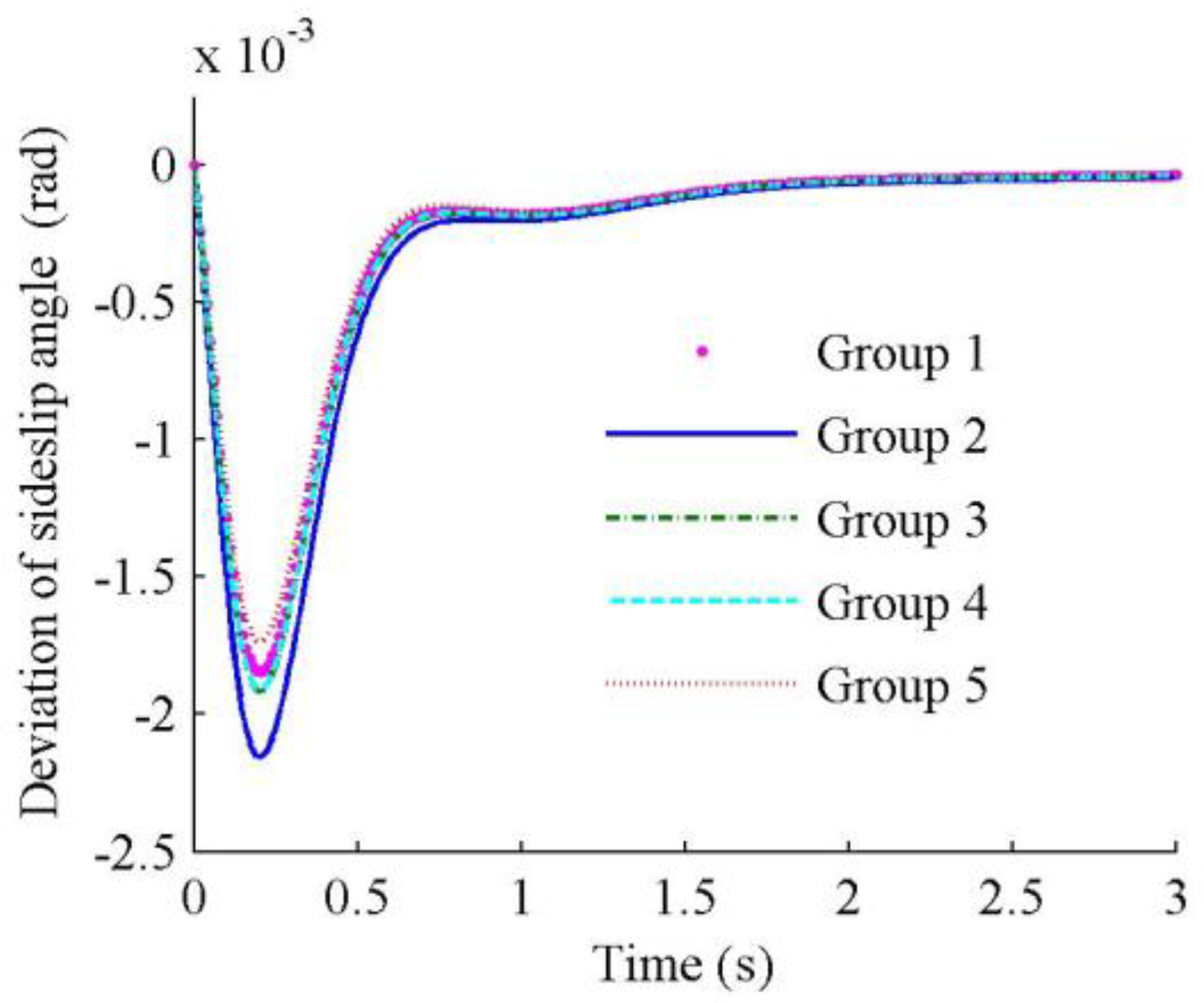
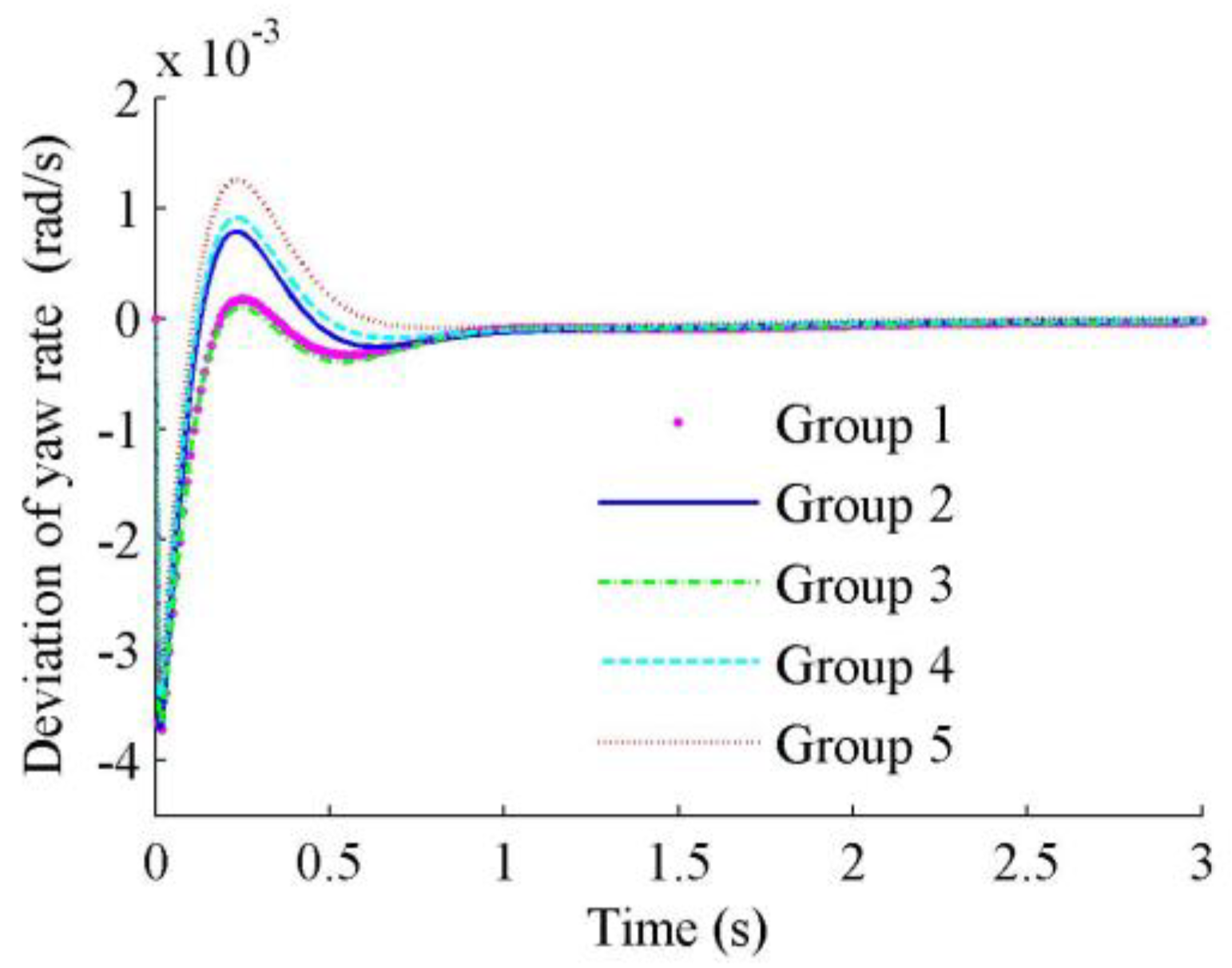
As shown in
Figure 9 and
Figure 10, although almost all of the parameters of the real 4WS vehicle have changed, the maximum deviations in the yaw rate and sideslip angle of the real 4WS vehicle with the hierarchical controller are −3.7 × 10
−3 rad/s and −2.16 × 10
−3 rad, respectively, which approach 0 after approximately 1 s and 1.5 s, respectively. Hence, even if the actual 4WS vehicle is traversing with little change in these parameters, the driver will hardly feel these variations and experience no uncomfortable feeling. Obviously, the hierarchical controller demonstrates good robustness.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}