On the Design of In-Wheel-Hub Motor Transmission Systems with Six-Link Mechanisms for Electric Vehicles

Abstract
:1. Introduction
2. Existing Motor Transmissions
2.1. Diagram Conversions
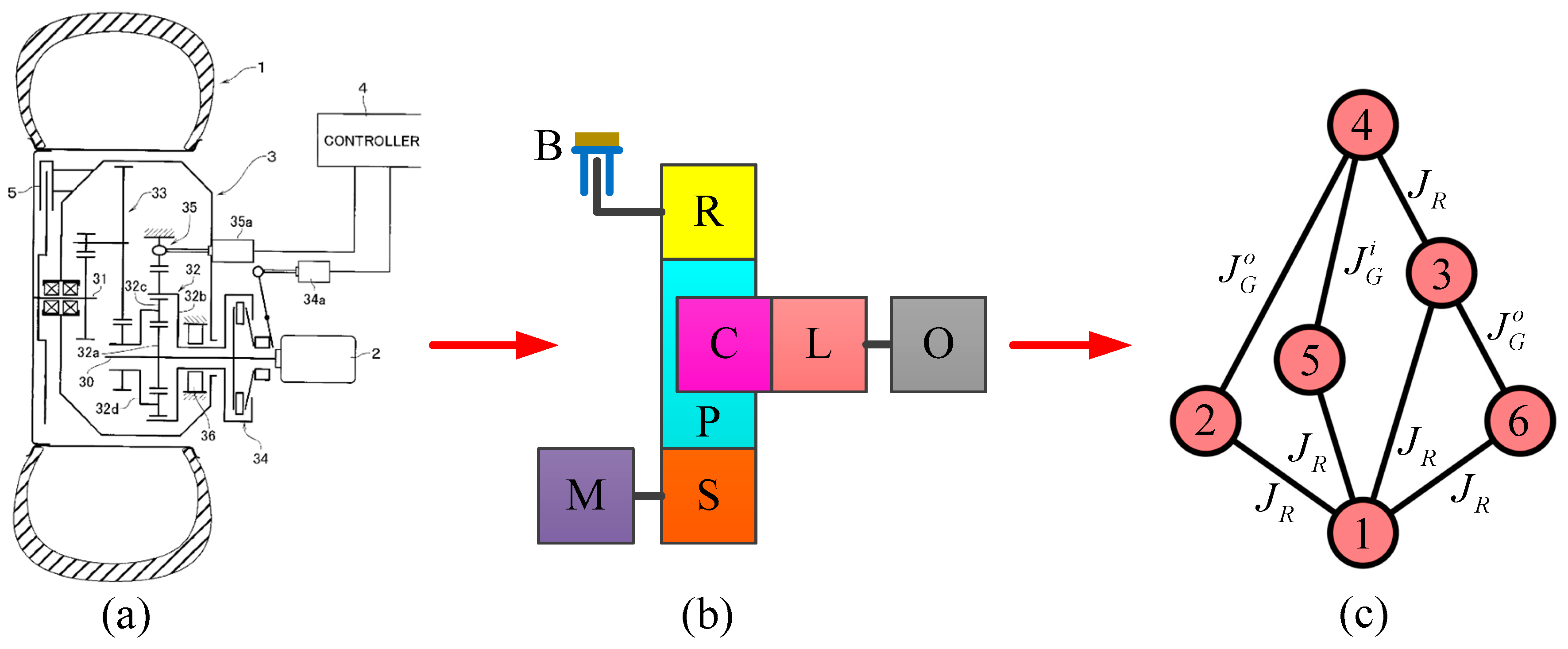
- This is a planetary gear train with a 2-DoF mechanism, which connects a simple PGT and a link.
- This mechanism comprises six members containing a ground link (G: member 1), a sun gear (S: member 2), a carrier (C: member 3) connected to the planet gears (P: member 4), a ring gear (R: member 5), and an additional link (L: member 6), which is connected to the carrier.
- This mechanism has eight joints which have three gear pairs (JG) with two external gear pairs (), one internal gear pair (), and five revolute joints (JR).
- This mechanism has a ground link connected to the four members.
2.2. Design Constraints
2.2.1. Mechanical Constraints
- The ground link should be a hard connection member.
- A quaternary or ternary link should be applied to the ground link.
- The ground link will not be connected to the planet gear.
- The ground link, binary link, and planet gear will be not connected to the three-bar loop.
- Each planet gear will be connected only to one carrier.
- The carrier will be connected to the ground link (member 1) and all the planet gears.
- In a PGT, there should be at least one ring gear and one sun gear.
- The planet gear and the ground link should be connected to both the ring gear and the sun gear.
- The remaining member(s) should be connected to any member in the mechanism.
- There are five revolute joints in this mechanism.
- Between the carrier and its planet gears there should be the revolute joint and the binary link. The ground link should also be the revolute joint.
- There are three gear pairs, including the internal gear joints () and the external gear joints ().
- The gear pairs should be set between the sun gear or the ring gear and the planet gear.
2.2.2. Output/Inputs Constraints
- The output shaft should be connected to a member of the mechanism.
- When the motors drive the vehicle to upgrade high torque, the planetary carrier or the ring gear should be connected to the output shaft.
- When the third member is held in the PGT set, the output shaft speed should be slower than the motor speed.
- Motor shaft 1 should be connected to a member of the mechanism.
- When the vehicle reaches high torque and speed reduction at the output shaft, the ring gear or the sun gear should be connected to motor 1.
- The motor 1 speed should be higher than the motor 2 speed.
- To avoid excessive output speed, the carrier should not be connected to motor 1.
- Motor shaft 2 should be connected to a member of the mechanism.
- When the vehicle reaches a high speed, the carrier or the ring gear should be connected to motor 2.
3. Feasible Mechanism Designs
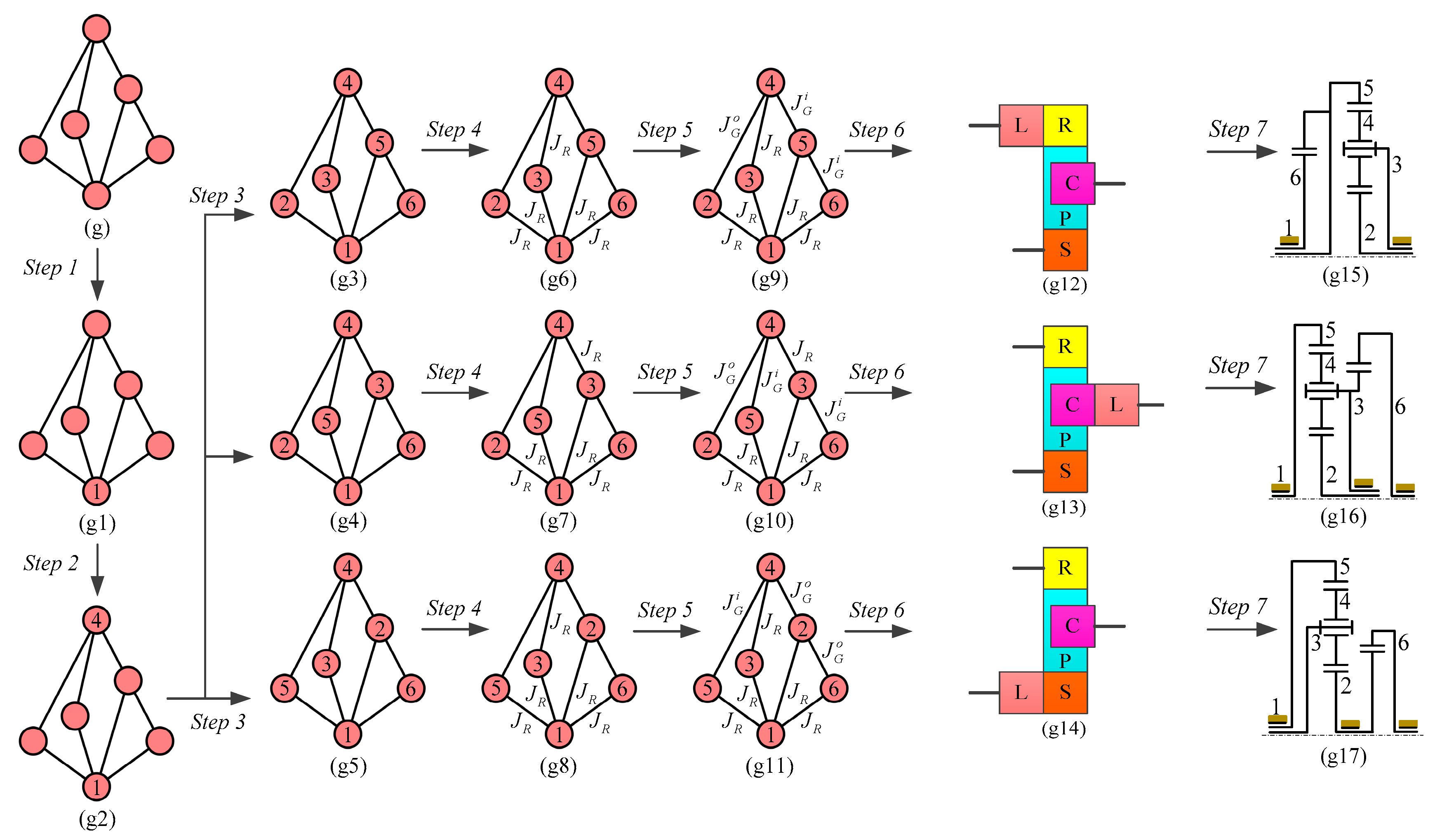
- Step 1: Nominate the ground link. As shown in Figure 5(g1), the ground link is nominated for each GKC.
- Step 2: Nominate the planet gear(s). The planet gear(s) is/are nominated for each result in Step 1, as shown in Figure 5(g2).
- Steps 3: Nominate the ring (sun) gear, carrier, and remaining member(s). The ring (sun) gear and the carrier are nominated for each result in Step 2. Then, the remaining member(s) is/are also nominated, as shown in Figure 5(g3–g5).
- Step 4: Nominate the revolute joints (JR). The revolute joints are nominated for each result in Step 3, as shown in Figure 5(g6–g8).
- Step 5: Nominate the gear pairs (JG). The internal gear pairs and the external gear pairs (JiG and JoG) are nominated for each result in Step 4, as shown in Figure 5(g9–g11).
- Step 6: Transfer to block diagrams. There are three specialized chains transferred to their respective block diagrams for each result in Step 5, as shown in Figure 5(g12–g14).
- Step 7: Transfer to schematic diagrams. There are also three block diagrams transferred to their respective schematic diagrams for each result in Step 6, as shown in Figure 5(g15–g17).
4. Atlas of Motor Transmissions
4.1. The Power Arrangement
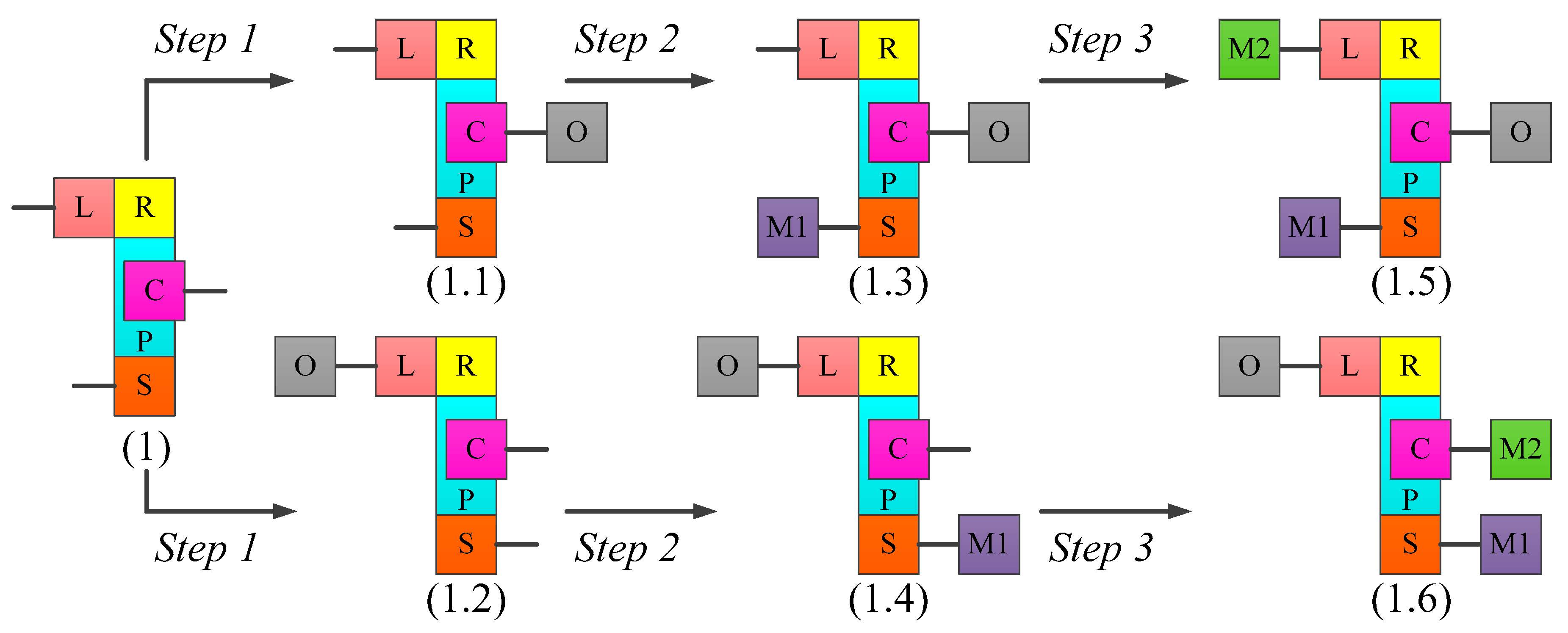
- Step 1: Nominate the Output (O). The output is nominated for this mechanism. As shown in Figure 7(1.1,1.2), two results are created.
- Step 2: Nominate Motor 1 (M1). Motor 1 is nominated for each result in Step 1. As shown in Figure 7(1.3,1.4), the nomination of motor 1 creates two results.
- Step 3: Nominate Motor 2 (M2). Motor 2 is nominated for each result in Step 2. As shown in Figure 7(1.5,1.6), the nomination of motor 2 creates two results.
4.2. The Clutch Arrangement
- Motor 1 mode: The vehicle is driven only by motor 1 when the vehicle requires high torque to begin running or climb a hill.
- Motor 2 mode: Motor 2 mode is shifted to the transmission to better support efficiency when the vehicle requires higher demand power while in cruise control on the highway.
- Combined power mode: The vehicle requires higher demand power for high-speed acceleration or a heavy load; the combined power mode is shifted to the transmission by connecting motor 1 and motor 2 to provide more power.
- Regenerative braking mode: The battery will be charged during the braking procedure of the vehicle, when the electric motor works as a generator to transfer kinetic energy to electrical energy.
- Step 1: M1 mode. As with the 1-DoF system, when the vehicle is driven by motor 1, motor 1 mode will be required. As shown in Figure 9(2.1,10.1), each result is created by adding the clutches and brakes.
- Step 2: M2 mode. As with the 1-DoF system, when the vehicle is driven by motor 2, motor 2 mode will be required. As shown in Figure 9(2.2,10.2), each result is created by adding the clutches and brakes.
- Step 3: Combine mode. Because the system becomes 2-DoF, the output shaft can be connected to both motors, as shown in Figure 9(2.3,10.3).
5. System Analysis
5.1. The Dynamic Analysis
5.2. The System Specifications
6. System Simulation
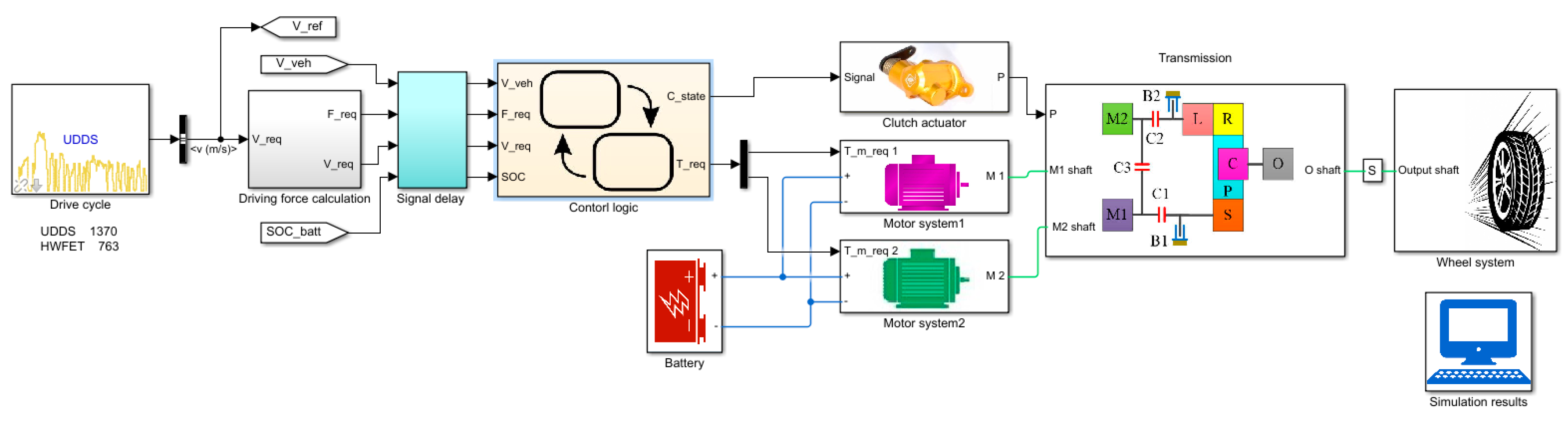
6.1. Simulation Structure
6.2. Control Parameters
6.3. Simulation Results
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Berman, B.; Gelb, G.; Richardson, N.; Wang, T. Power Train Using Multiple Power Sources. U.S. Patent 3,566,717, 2 March 1971. [Google Scholar]
- Hata, H.; Kojima, M.; Adachi, M.; Shimizu, T. Power Transmission System. U.S. Patent 7,081,060, 25 July 2006. [Google Scholar]
- Schmidt, M.R. Two-Mode, Compound-Split, Electro-Mechanical, Vehicular Transmission. U.S. Patent 5,558,589, 24 September 1996. [Google Scholar]
- Zhang, D.; Chen, J.; Hsieh, J.; Rancourt, J.; Schmidt, M.R. Dynamic modeling and simulation of two-mode electric variable transmission. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2001, 215, 1217–1223. [Google Scholar] [CrossRef]
- Ai, X.; Anderson, S. An Electromechanical Infinitely Variable Speed Transmission. SAE Paper 2004-01-0354. In Proceedings of the SAE 2005 World Congress & Exhibition, Detroit, MI, USA, 11–14 April 2005. [Google Scholar]
- Villeneuve, A. Dual Mode Electric Infinitely Variable Transmission. In Proceedings of the SAE, Detroit, MI, USA, 8 March 2004; pp. 1–11. [Google Scholar]
- Hoeijmakers, M.J. The Electric Variable Transmission. IEEE Trans. Ind. Appl. 2006, 42, 1092–1100. [Google Scholar] [CrossRef]
- Turnbull, P.F.; Conlon, B.M.; Holmes, A.G.; Swales, S.H. Electrically Variable Transmission. U.S. Patent 8,585,520, 19 November 2013. [Google Scholar]
- Zhang, X.; Li, S.E.; Peng, H.; Sun, J. Efficient exhaustive search of power-split hybrid powertrains with multiple planetary gears and clutches. J. Dyn. Syst. Meas. Control 2015, 137, 121006. [Google Scholar] [CrossRef]
- Hoang, N.T.; Yan, H.S. Configuration Synthesis of Novel Series-Parallel Hybrid Transmission Systems with Eight-Link Ravigneaux Mechanisms. JCSME 2018, 34, 345–355. [Google Scholar]
- Yang, Y.; Arshad-Ali, K.; Roeleveld, J.; Emadi, A. State-of-the-art electrified powertrains-hybrid, plug-in, and electric vehicles. Int. J. Powertrains 2016, 5. [Google Scholar] [CrossRef]
- Weiss, H. Electric Wheel Drive for a Utility Vehicle. U.S. Patent 005,813,488, 29 September 1998. [Google Scholar]
- He, J.; He, H. Powertrain and Method for a Kinetic Hybrid Vehicle. U.S. Patent 0,196,713, 2 August 2012. [Google Scholar]
- Gunji, D.; Matsuda, Y.; Kimura, G. Wheel Hub Motor. U.S. Patent 008,758,178, 24 June 2014. [Google Scholar]
- NSK’s Website. Available online: http://www.nsk.com/company/news/2017/press0119a.html (accessed on 19 January 2017).
- Bayrak, A.E.; Ren, Y.; Papalambros, P.Y. Topology generation for hybrid electric vehicle architecture design. J. Mech. Des. 2016, 138, 081401. [Google Scholar] [CrossRef]
- Xie, T.; Hu, J.; Peng, Z.; Liu, C. Synthesis of seven-seed planetary gear trains for heavy-duty commercial vehicle. Mech. Mach. Theory 2017, 90, 230–239. [Google Scholar] [CrossRef]
- Yan, H.S. Creative Design of Mechanical Devices; Springer: Berlin, Germany, 1998. [Google Scholar]
- Ngo, H.T.; Yan, H.S. Configuration synthesis of series-parallel hybrid transmission. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2015, 230, 664–678. [Google Scholar] [CrossRef]
- Hoang, N.T.; Yan, H.S. Configuration Synthesis of Novel Series-Parallel Hybrid Transmission Systems with Eight-Bar Mechanisms. Energies 2017, 10, 1044. [Google Scholar] [CrossRef]
- Kima, Y.; Hamada, T. Control Device for In-Wheel Transmissions in an Electric Vehicle. U.S. Patent 668,841B2, 10 February 2004. [Google Scholar]
- Mi, C.; Abul Masrur, M. Hybrid Electric Vehicle: Principles and Applications with Practical Perspectives; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
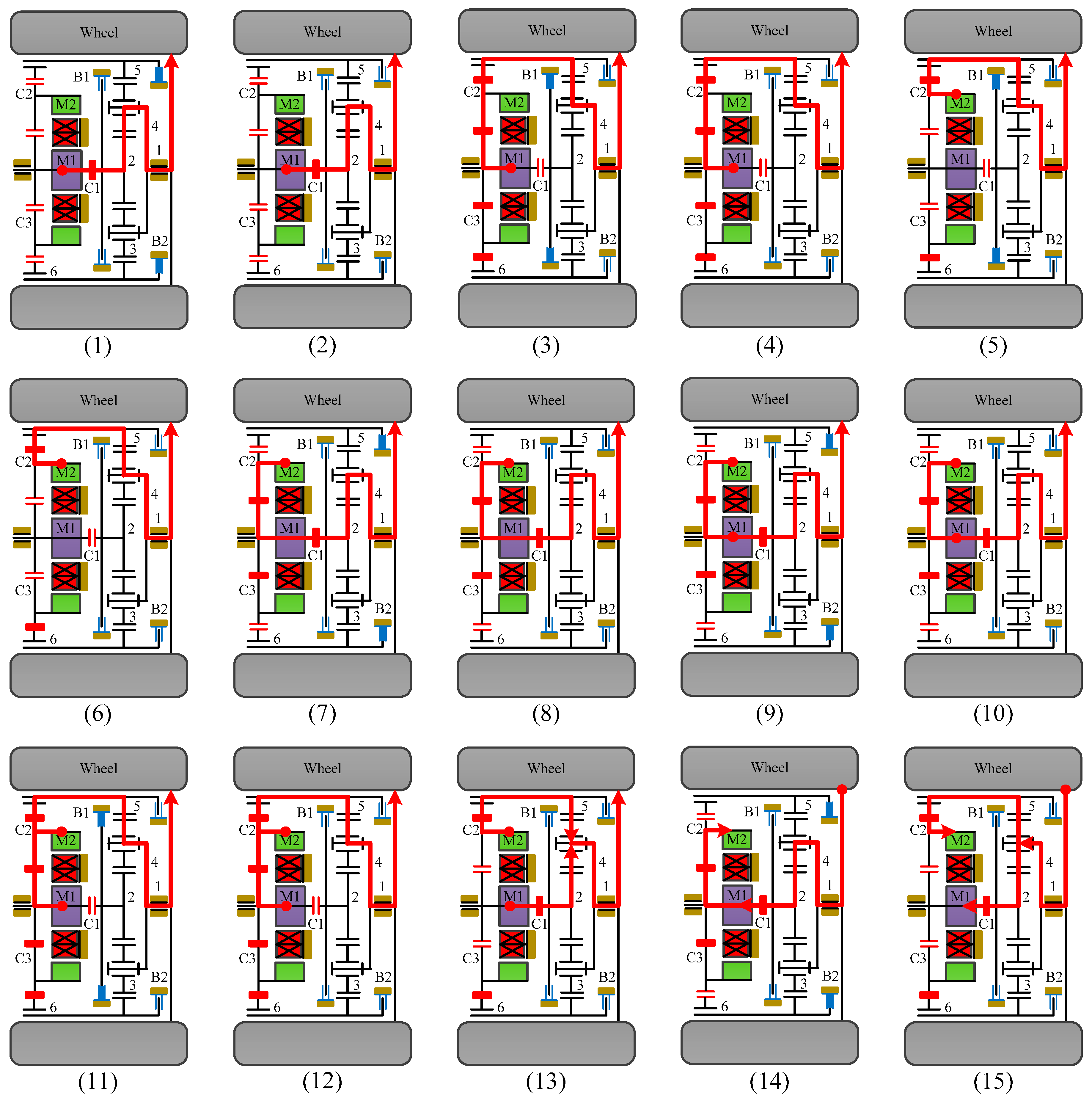
| No. | The Operation Modes | Brake and Clutch Engagement | Reduction Ratio | Remark | ||||
|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | B1 | B2 | ||||
| 1 | Motor 1-1 | x | x | 3 | Motor 1 alone drives the wheel, while motor 2 is idle | |||
| 2 | Motor 1-2 | x | 1.85 | |||||
| 3 | Motor 1-3 | x | x | x | 1 | |||
| 4 | Motor 1-4 | x | x | 1.35 | ||||
| 5 | Motor 2-1 | x | x | 1 | Motor 2 alone drives the wheel, while motor 1 is idle | |||
| 6 | Motor 2-2 | x | 1.35 | |||||
| 7 | Motor 2-3 | x | x | x | 3 | |||
| 8 | Motor 2-4 | x | x | 1.85 | ||||
| 9 | Combined power 1 | x | x | x | 3 | Motor 1 and motor 2 drive the wheel | ||
| 10 | Combined power 2 | x | x | 1.85 | ||||
| 11 | Combined power 2 | x | x | x | 1 | |||
| 12 | Combined power 4 | x | x | 1.35 | ||||
| 13 | Combined power 5 | x | x | 1.85 | ||||
| 14 | Regenerative braking 1 | x | x | x | 3 | Motors work as a generator | ||
| 15 | Regenerative braking 2 | x | x | 1.85 | ||||
| Vehicle | Motor 1 | ||
|---|---|---|---|
| Weight (m) | 1.550 kg | Model | Westinghouse 75 |
| Frontal area (Af) | 2.10 m2 | Mass | 91 kg |
| Wheel radius (Rw) | 0.325 m | Type | AC Induction |
| Rolling resistance coefficient (Cr) | 0.02 | Maximum Speed | 10,000 rpm |
| Transmission efficiency (ηt) | 0.95 | Maximum power | 55 kW |
| Driving environment | Maximum torque | 271 Nm | |
| Incline angle (θ) | 0 degree | Efficient region | 3000–10,000 rpm |
| Gravity (g) | 9.81 m/s2 | Peak efficiency | 92% |
| Air mass density (ρ) | 1.225 kg/m3 | Motor 2 | |
| Aerodynamic drag coefficient (Cd) | 0.33 N*s2/kg*m | Model | Prius Japan |
| Performance | Mass | 76 kg | |
| Maximum speed | 200 km/h | Type | AC Induction |
| Acceleration time | 9 s | Maximum Speed | 6000 rpm |
| Grade ability | 32% | Maximum power | 75 kW |
| Battery | Maximum torque | 322 Nm | |
| Model | MY 2016 S lithium-ion battery | Efficient region | 2000–6000 rpm |
| Max capacity CN | 85 kWh | Peak efficiency | 90% |
| Operation Modes | Time (s) | Percentage (%) | ||
|---|---|---|---|---|
| UDDS | HWFET | UDDS | HWFET | |
| 1. Parking | 330 | 18 | 27 | 1 |
| 2. Motor 1 | 122 | 110 | 10 | 9 |
| 3. Motor 2 | 73 | 36 | 6 | 3 |
| 4. Combined power | 390 | 891 | 32 | 73 |
| 5. Regenerative braking | 305 | 165 | 25 | 14 |
| Total | 1220 | 100 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hoang, N.-T.; Yan, H.-S. On the Design of In-Wheel-Hub Motor Transmission Systems with Six-Link Mechanisms for Electric Vehicles. Energies 2018, 11, 2920. https://doi.org/10.3390/en11112920
Hoang N-T, Yan H-S. On the Design of In-Wheel-Hub Motor Transmission Systems with Six-Link Mechanisms for Electric Vehicles. Energies. 2018; 11(11):2920. https://doi.org/10.3390/en11112920
Chicago/Turabian StyleHoang, Ngoc-Tan, and Hong-Sen Yan. 2018. "On the Design of In-Wheel-Hub Motor Transmission Systems with Six-Link Mechanisms for Electric Vehicles" Energies 11, no. 11: 2920. https://doi.org/10.3390/en11112920
APA StyleHoang, N.-T., & Yan, H.-S. (2018). On the Design of In-Wheel-Hub Motor Transmission Systems with Six-Link Mechanisms for Electric Vehicles. Energies, 11(11), 2920. https://doi.org/10.3390/en11112920