1. Introduction
Accurate estimation of synchrophasors of voltage and current waveforms is a key aspect of the correct operation of modern electric power systems. IEEE standard C37.118.1-2011 defines the measurement of synchrophasors under all operation conditions, specifying methods for evaluating these measurements and requirements for compliance with the standard, under both steady-state and dynamic conditions [
1,
2].
The traditional methods for synchrophasor estimation are based on a steady-state model that assumes phasor parameters are constant during the measurement window, but in general, power system voltage and currents are not steady-state sinusoidal waveforms, particularly during disturbances. Harmonic and other non-harmonic frequency components, step changes in magnitude and phase angle, oscillations, fast transients, and high-frequency components can be produced during electromagnetic and electromechanical transient disturbances. The estimation of phasors under these dynamic conditions may produce erroneous results as is reported in [
3].
Discrete Fourier Transform (DFT)-based phasor estimation algorithms have traditionally been used because of their good performance in steady-state conditions, and they are used in many commercial phasor measurement units (PMUs), but they fail for off-nominal frequencies and under transient and dynamic conditions. Under these conditions, time-varying amplitude and phase angle models have been proposed to improve the accuracy of phasor estimation and for compliance with synchrophasor measurement standards [
4,
5,
6,
7,
8,
9,
10,
11,
12].
Dynamic phasor estimation algorithms have been proposed [
4,
5,
6], where the phasor is approximated with a Taylor polynomial expansion around the reference time. A Kalman filter was used [
7,
8] to estimate a dynamic phasor and its derivatives. A state-space model was used where the dynamic phasor was approximated by a
kth Taylor polynomial expansion. The state-space model uses the phasor and its derivatives as the state variables and a state transition matrix obtained from the derivatives of each Taylor truncated dynamic phasor, applying the Kalman filter for estimation.
A Taylor-Kalman-Fourier filter for instantaneous estimation of oscillating phasors was proposed in [
9]. The signal model was extended to the full set of harmonics, using an extended transition matrix where all harmonics are included, obtaining filters that were more robust to noise and able to estimate dynamic harmonics, providing phasor estimates free from harmonic infiltration.
A modified Taylor-Kalman filter for instantaneous phasor estimation based on an improved dynamic model was proposed in [
10]. Other extensions of the Taylor-Kalman filter model have been introduced [
11,
12]. In [
11], an output smoother was applied to improve the estimation accuracy of the method when large oscillations in amplitude and phase angle in harmonics and interharmonics affect the input waveforms. Reference [
12] introduced a Taylor Extended Kalman Filter formulation that separately considers the amplitude and phase angle of the Taylor expansion. A new dynamic model was then defined that enables the reduction in the state space dimension considering different expansion orders of magnitude and phase angle, while including harmonics in the model.
A different approach from those based on the use of the synchrophasor Taylor series expansion model was proposed in [
13]. An adaptive algorithm was used for phasor estimation, eliminating the effects of various transient disturbances on voltage and current waveforms. The algorithm pre-analyzes the waveforms in the observation window to detect and localize a discontinuity. The data detected before or after the singular point, excluding the transient, are used for phasor estimation.
In this paper, we propose the use of a non-linear adaptive Extended Kalman Filter (EKF) to better adapt to the dynamic requirements of power system signals. The fundamental component, the most relevant harmonic components, the dominant subsynchronous interharmonic component, and the power system frequency were used in a 13-state EKF to model the system and to estimate fundamental and harmonic phasors and the power system frequency. This method enables on-line tracking of the fundamental, harmonics, and subsynchronous interharmonic phasors and the detection of transient conditions in the input waveform using the residual of the Kalman filter.
The paper is organized as follows:
Section 2 presents the main characteristics of the EKF and the signal model used in our proposal.
Section 3 outlines the performance of the algorithm under off-nominal frequencies, frequency ramps, power oscillations, and step changes in magnitude and phase angle dynamic compliance tests defined in IEEE C37.118.1-2011. The obtained results are also analyzed in this section.
Section 4 outlines the transient detection capability of the method and
Section 5 presents the conclusions.
3. Performance Analysis
The performance of the proposed phasor estimation method was evaluated using the dynamic compliance tests defined in the IEEE synchrophasor measurement standard and its amendment [
1,
2], for both P-class and M-class compliance. In each test, the estimated phasor at instant
k is compared with the theoretical value provided as an input, computing the Total Vector Error (TVE), Frequency Error (FE), and Rate of Change of Frequency (ROCOF) Error (RFE) performance indices as measurement of the difference between the ideal values and their estimates as defined in [
1].
This section presents the results obtained with the proposed method under the different dynamic tests defined in IEEE Standard C37.118.1-2011: frequency deviations, amplitude and phase angle modulations, frequency ramps, and step changes in magnitude and phase angle.
As previously mentioned in
Section 2, a previous analysis of the signal in a specific power system network is required to select the dominant frequency components to be included in the state vector. To this end, the daily mean value of the fundamental and odd harmonic components from the 3rd to the 11th order and the mean square values of voltage supply measured in the specific power system network were selected as the initialization values of the state vector and its covariance matrix, respectively. We selected 50 Hz as the initial value of the power system frequency and a
Qk/
Rk ratio of 10. This ratio was proven to be an efficient solution in the low-voltage distribution network in [
17]. Other power system networks require a similar previous analysis to select the most adequate state vector and the initialization parameters of the Kalman filter. The sampling rate used in the simulations was 6.4 kS/s (128 samples/cycle in a 50 Hz system).
3.1. Frequency Deviation
In these tests, a constant frequency was is applied to the nominal frequency in the range of ±5 Hz for M-class or ±2 Hz for P-class compliance, with constant phase angle in steps of 0.1 Hz, as defined in [
1], computing the maximum magnitudes of the three indices: TVE, FE and RFE. The maximum acceptable values of these performance indices are 1%, 0.005 Hz, and 0.01 Hz/s, respectively, for M-class compliance. According to the standard amendment [
2], the values are 1%, 0.005 Hz, and 0.4 Hz/s for P-class compliance, respectively.
The test signal used in this test was [
1]:
where
Xm is the magnitude,
φ is the phase angle of the fundamental component,
f0 is the nominal power system frequency, and
fdev is the frequency deviation.
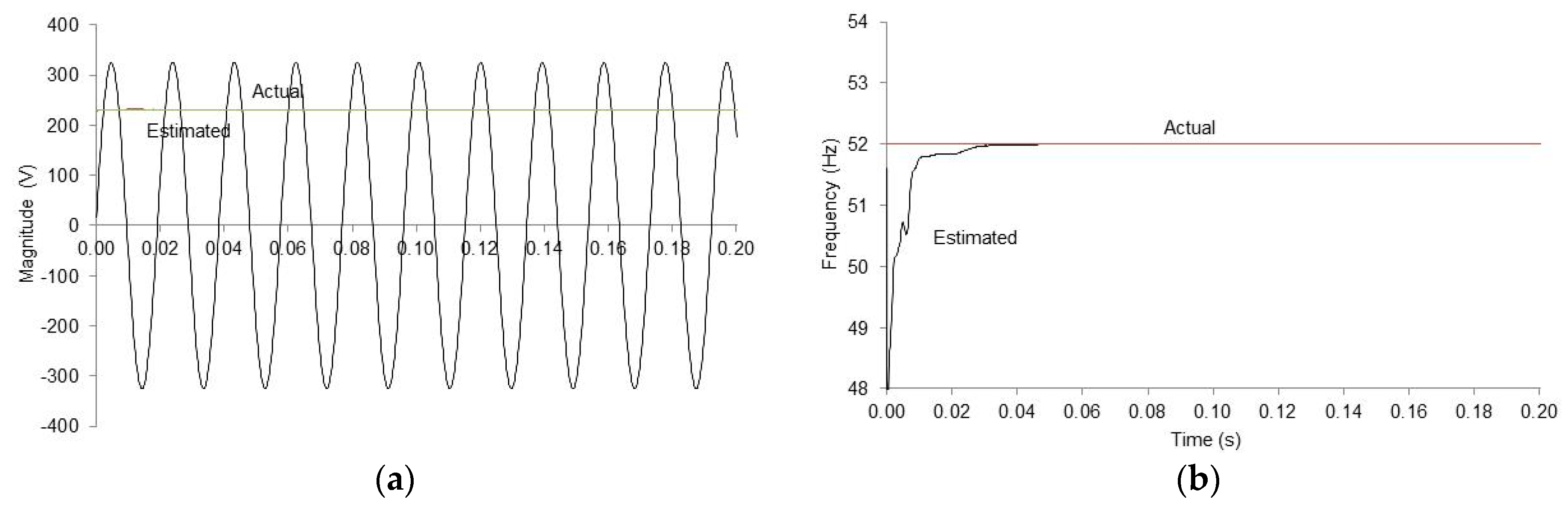
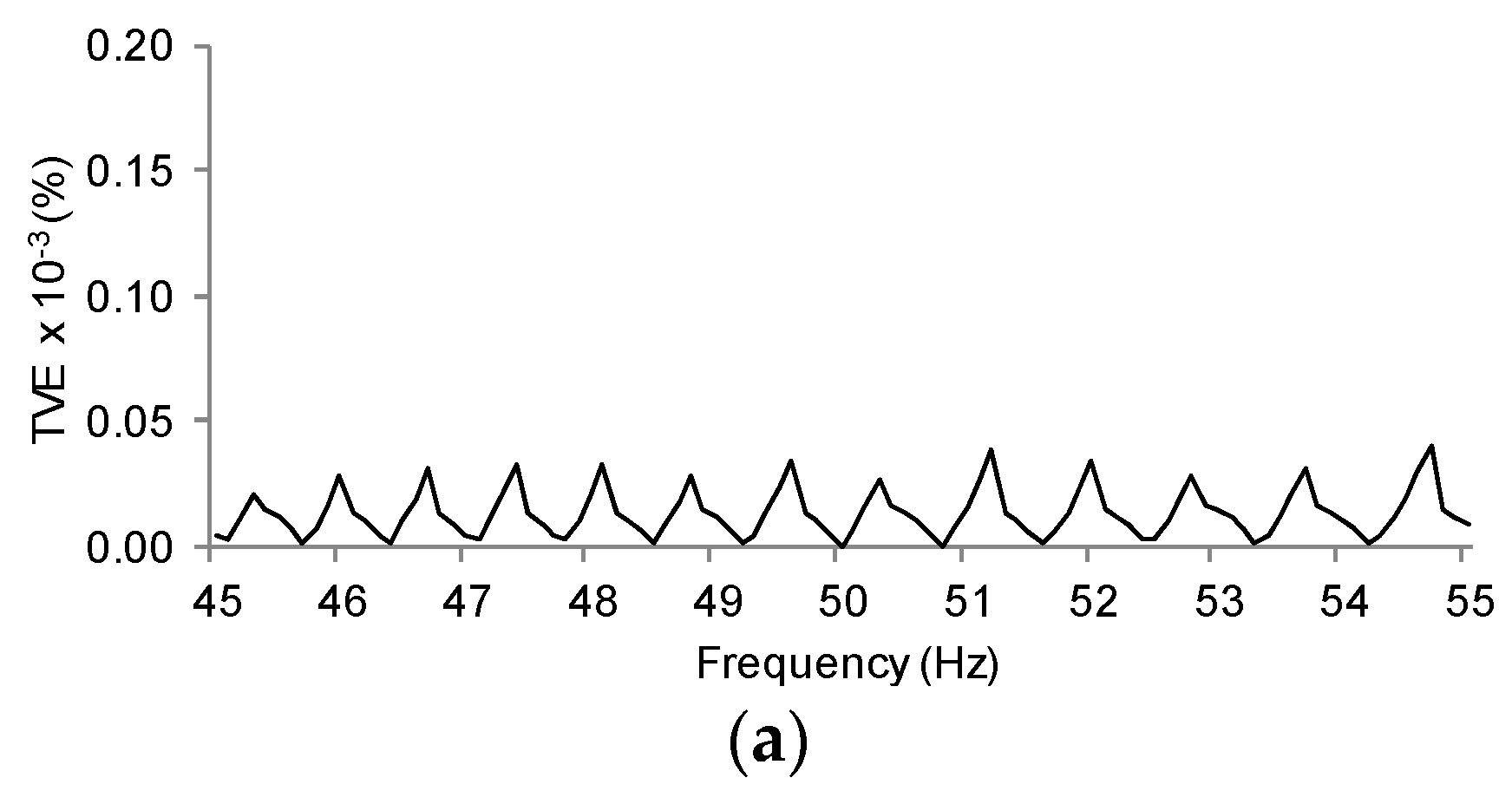
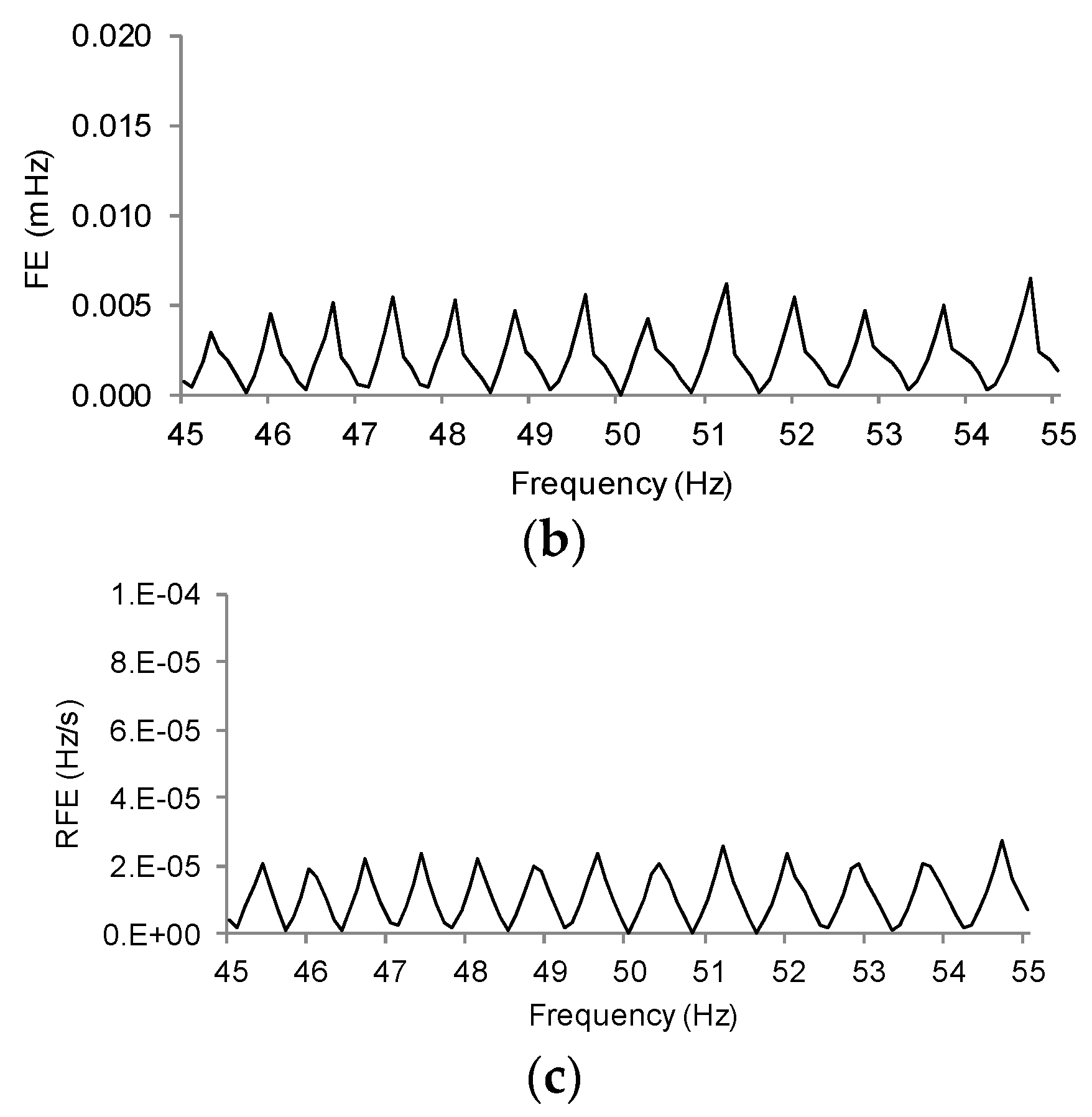
As an example of the performance of our method,
Figure 1 shows the actual and the estimated magnitude and frequency in the case of a 230 V magnitude and 52 Hz voltage waveform. After a short initialization time, both the estimated magnitude and frequency quickly converged to their real values. In this case, the maximum TVE, FE, and RFE were 3.4 × 10
−5%, 5.48 × 10
−3 mHz, and 2.34 × 10
−5 Hz/s respectively.
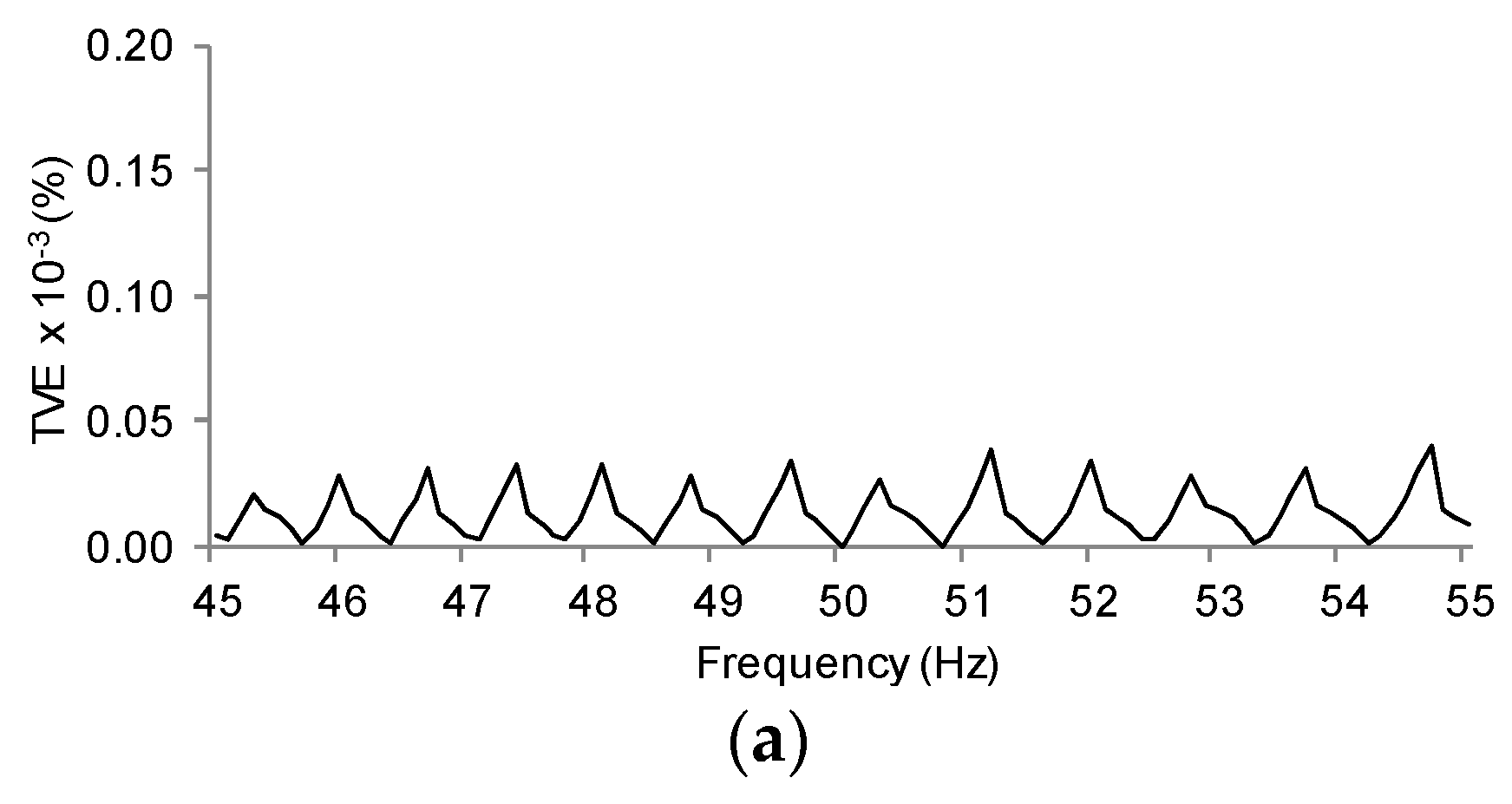
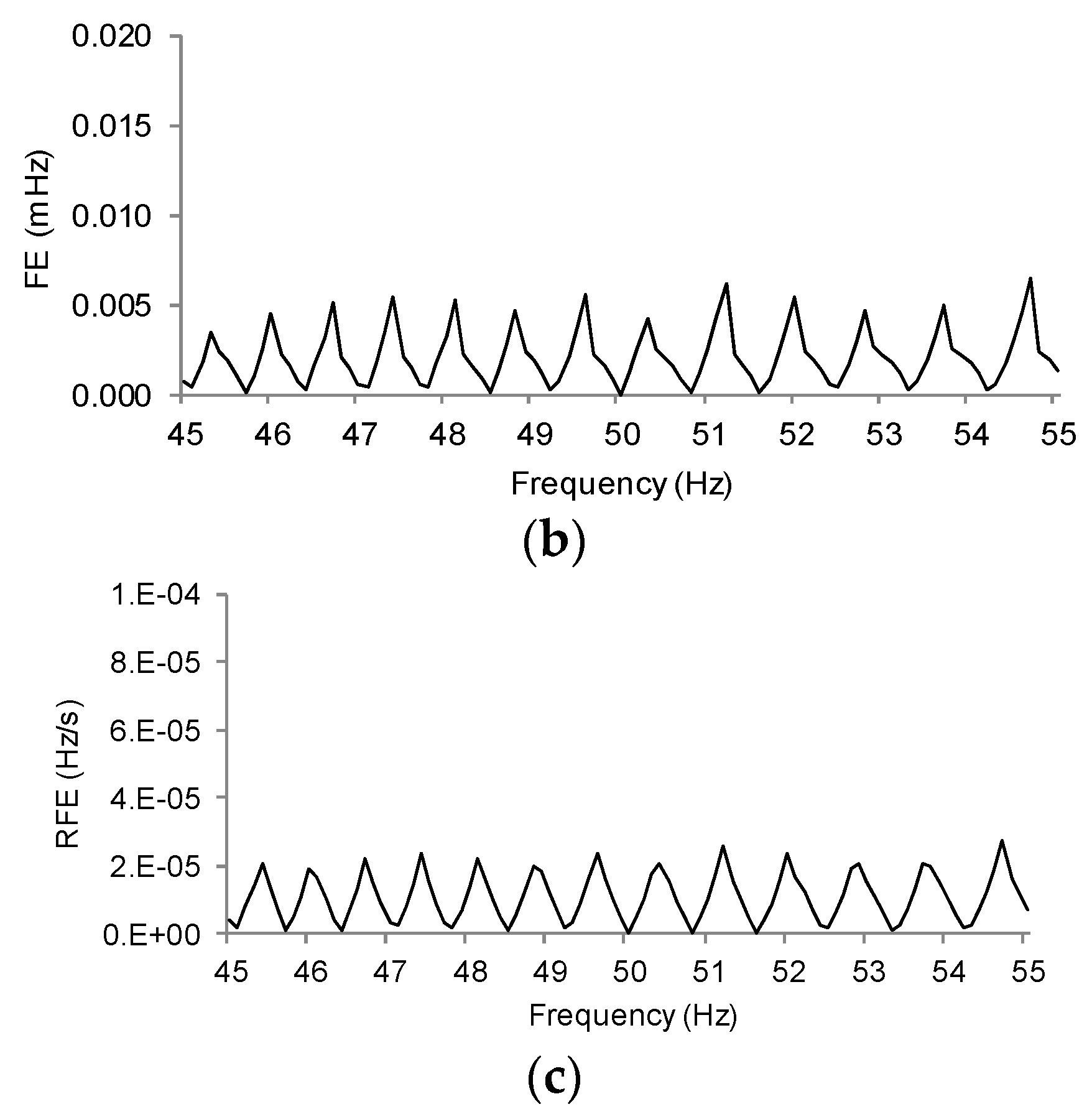
Figure 2 shows the maximum values of TVE, FE, and RFE during the five second record for each of the frequency deviation test signals. The maximum values of the three performance indices were all below the minimum requirements of the synchrophasor measurement standard for both P-class and M-class compliance.
3.2. Amplitude and Phase Angle Modulation
These tests were performed by modulating the input signal with sinusoidal signals simultaneously applied to signal magnitude and phase angle, which were used to estimate the bandwidth of the estimation algorithm. These signals are mathematically represented for a single phase as [
1]:
where
Xm is the amplitude,
w0 is the nominal frequency,
w is the modulating frequency, and
kx and
ka are the amplitude and phase angle modulation factors, respectively.
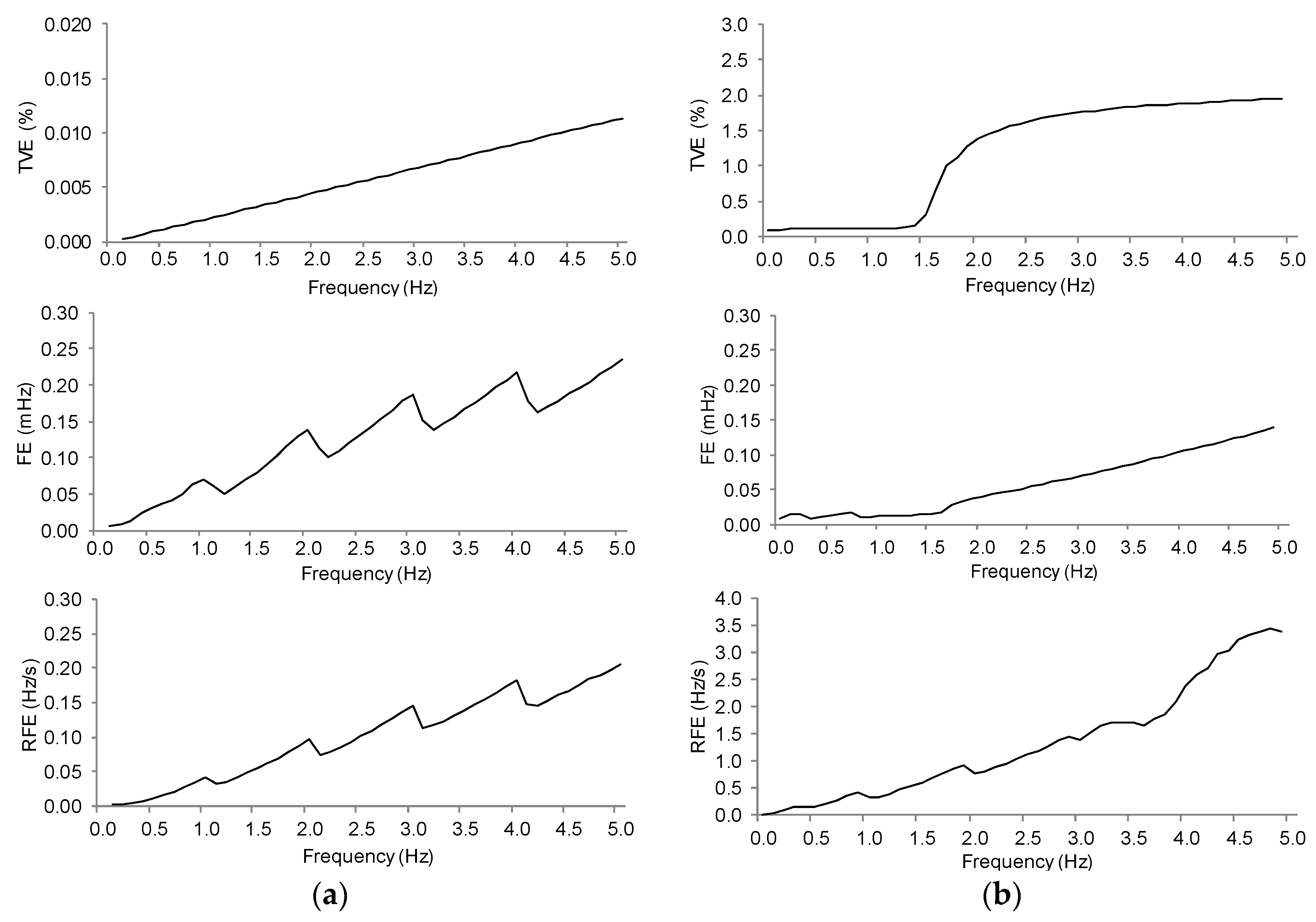
The IEEE synchrophasor measurement standard allows a maximum 3% TVE for modulating frequencies from 0.1 Hz to 5 Hz, and the maximum values of FE and RFE should be lower than 0.06 Hz and 3 Hz/s for P class compliance, respectively, and reporting rates higher than 20, and 0.3 Hz and 30 Hz/s, respectively, for M-class compliance at the same reporting rate. According to the standard, TVE, FE, and RFE indices should be measured over at least two full cycles of the signal in the different modulation tests.
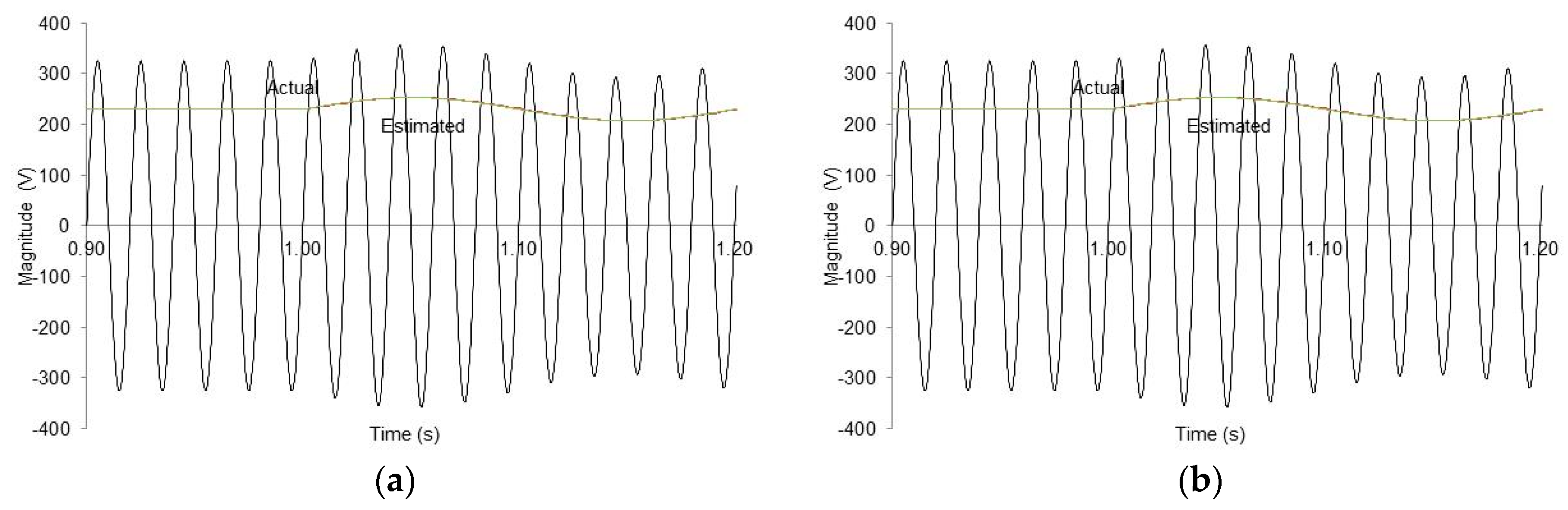
Figure 3 shows the estimated amplitude and frequency in the case of a 230 V magnitude and 50 Hz voltage waveform with a 10% magnitude, and 0.1 Hz amplitude modulation starting from 1 s of the record. As can be seen in the figure, the estimated amplitude accurately tracked the actual voltage fluctuation with minimum frequency error.
Figure 4a,b show the maximum TVE, FE, and RFE values obtained for the different amplitude and phase modulation test signals for modulation frequencies from 0.1 Hz to 5 Hz, varying in steps of 0.1 Hz and 10% amplitude and 10% phase angle modulation. From the results reported, the maximum 3% TVE criteria was satisfied under all conditions. The same applies for the measurements of maximum values of FE and RFE indices.
3.3. Frequency Ramp
According to the synchrophasor measurement standard, the performance of a measurement method should also be evaluated during frequency ramp tests. Mathematically, the input signal can be represented by:
where
Xm is the amplitude,
w0 is the nominal frequency, and
Rf (=
df/
dt) is the frequency ramp rate in Hz/s.
According to [
2], the ramp rate and the frequency range in frequency ramp tests should be ±1.0 Hz/s and ±2 Hz for P-class compliance and ±1.0 Hz/s and ±5 Hz for M-class compliance, respectively. The measurement error limit in TVE is 1% in both cases, whereas the limits are 0.01 Hz and 0.4 Hz/s (P-class), and 0.01 Hz and 0.2 Hz/s (M-class) for FE and RFE, respectively. A transition time of ±2/
Fs, where
Fs is the reporting rate, is allowed for TVE, FE, and RFE compliance before and after the sudden change in ROCOF occurs.
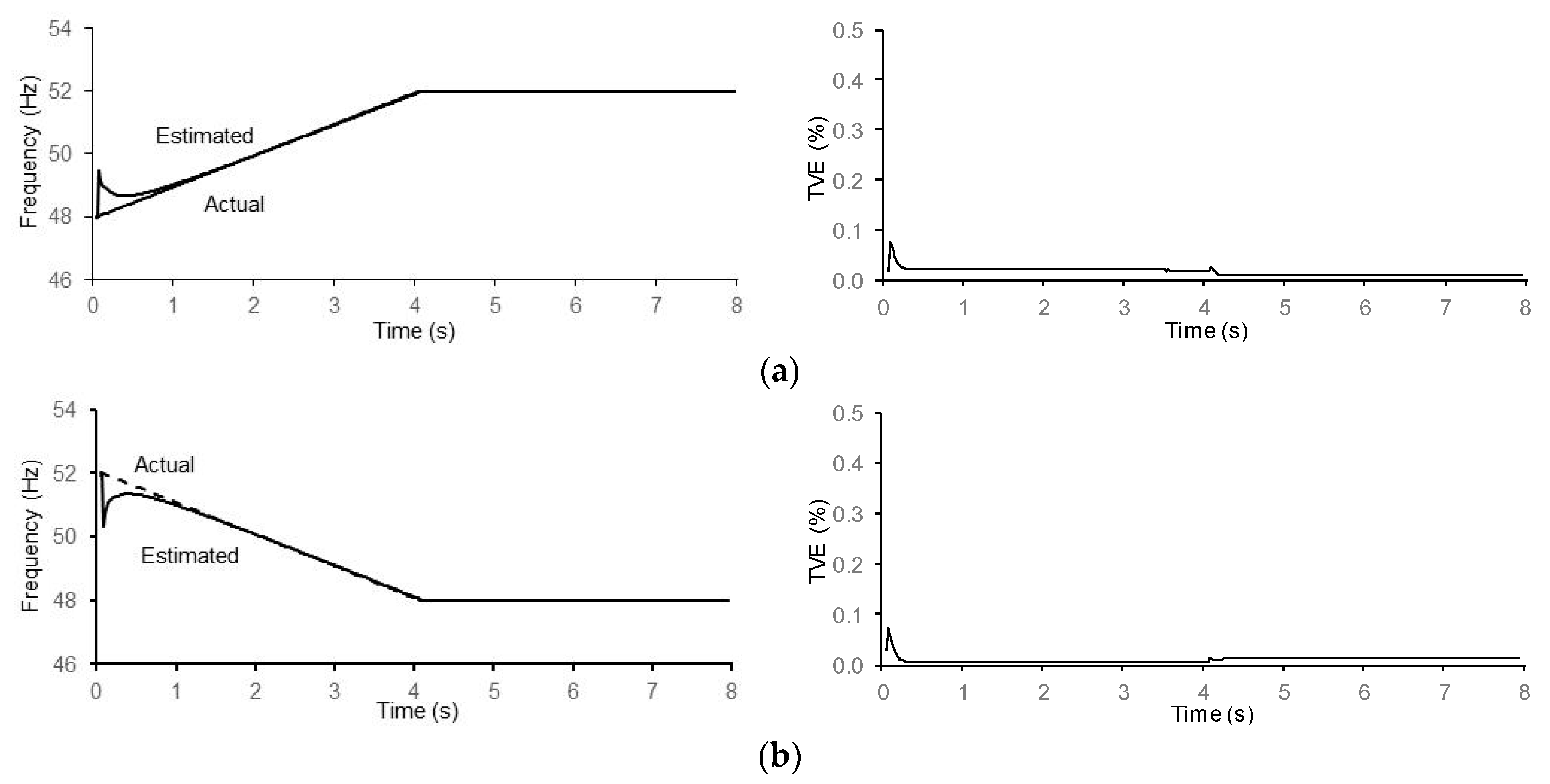
Figure 5 shows the time evolution of the frequency and TVE computed with the 13-state EKF method proposed during a positive and a negative ramp test of 1 Hz/s in the range of ±2 Hz (P-class). All results reported were obtained considering the previously mentioned exclusion intervals, with
Fs = 50. With the exception of the beginning of the frequency ramp, the method presented an accurate convergence during the test. The maximum values of TVE were 0.074% and 0.071% for the positive and negative ramp test, respectively.
3.4. Step Changes in Magnitude and Phase Angle
In these tests, the test signals suddenly transitioned in the magnitude/phase angle between two steady states. The test signals were used to determine response time, delay time, and overshoot in the measurement. In our proposal, once the step change was applied, the 13-state EKF re-initialized to improve its transient response to the step change. Other proposals to improve the transient response of a Kalman filter have been previously reported [
22,
23,
24]
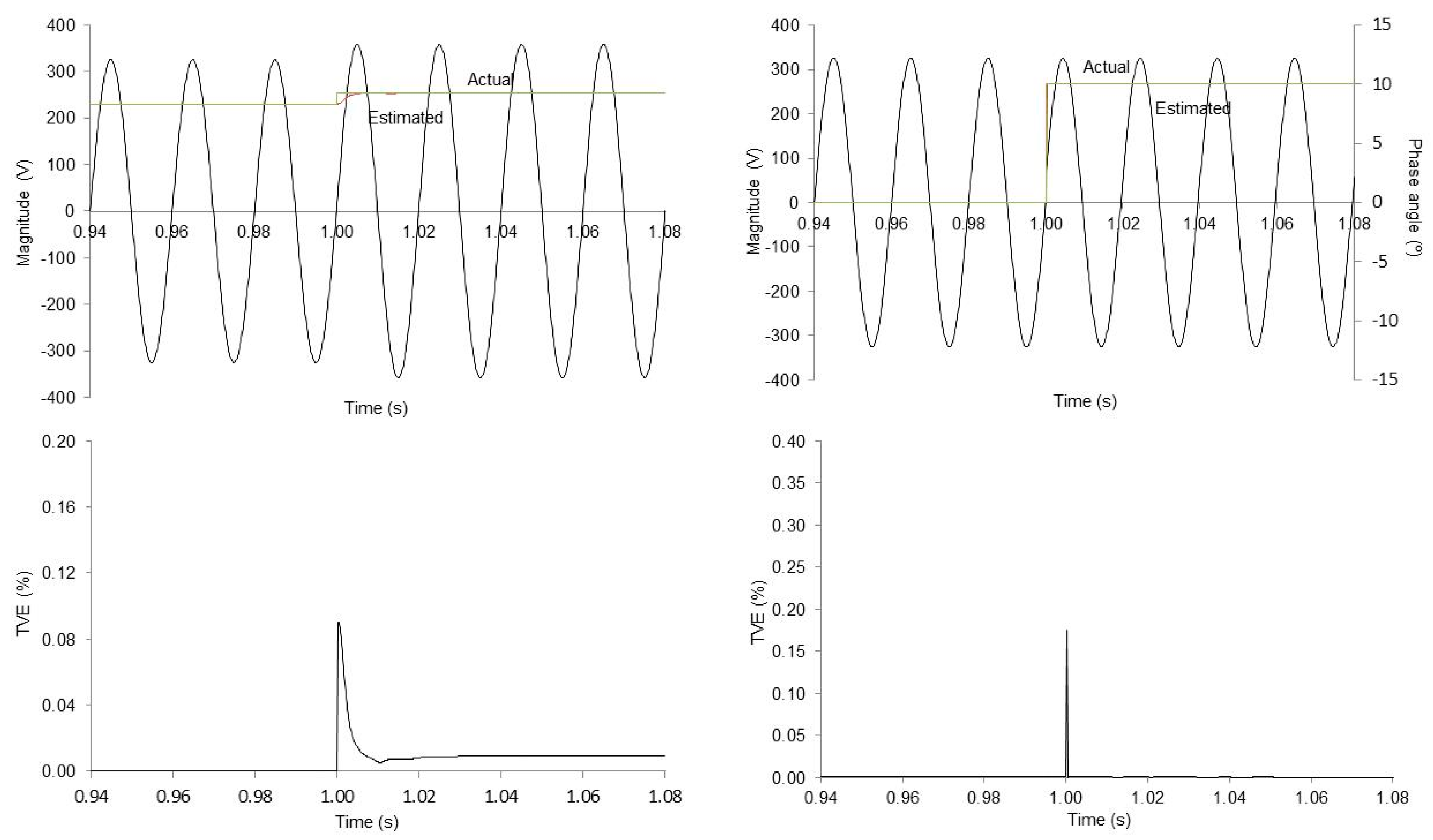
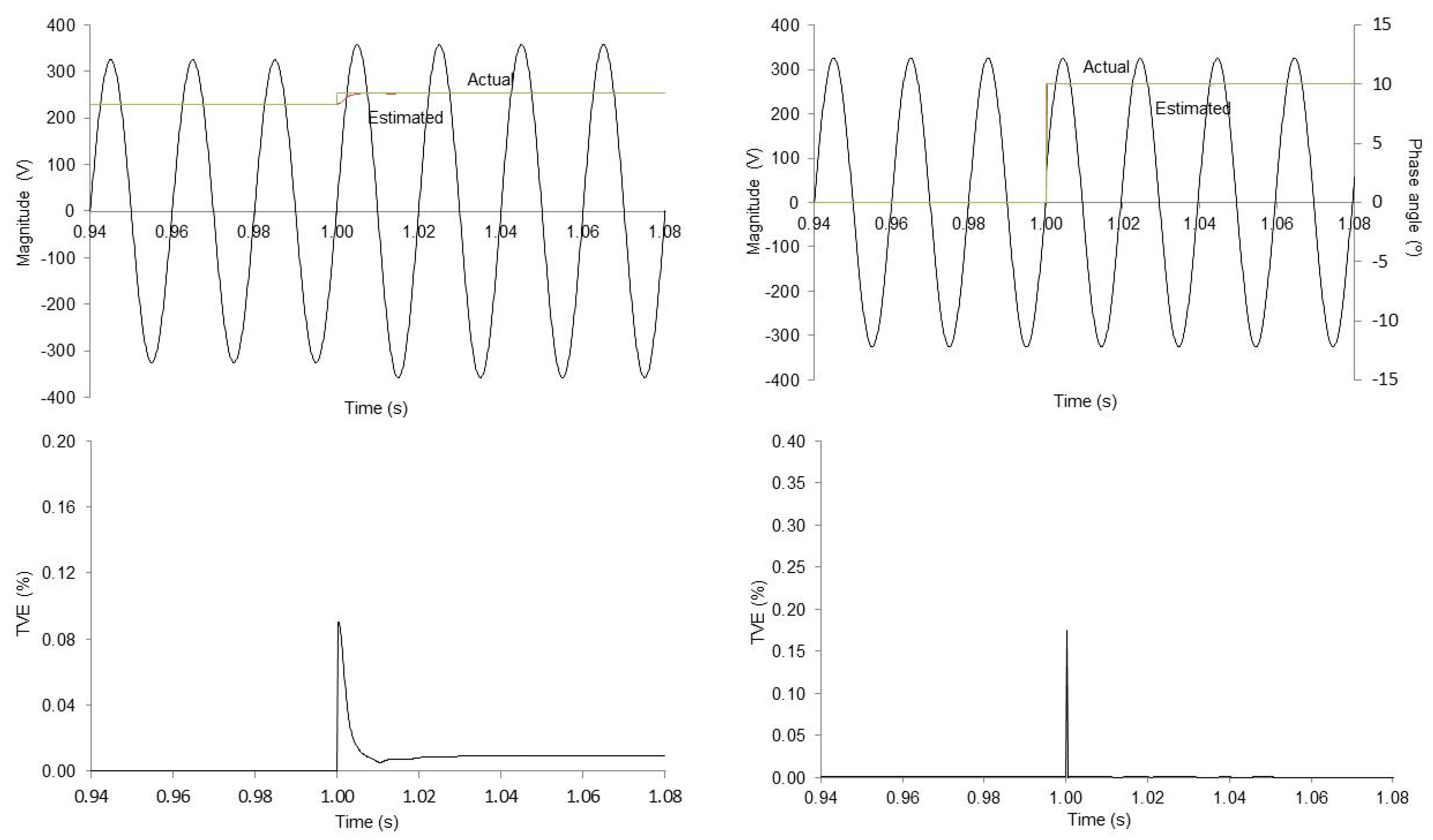
Figure 6a,b show the estimated magnitude, the residual, and TVE during a +10% step change in magnitude (
kx = 0.1) and the estimated phase angle and TVE during a +10° phase angle step change (
ka = 0.1). The method was able to accurately track these transient conditions, with the residual showing a sudden transition in its magnitude at the beginning of these changes, and the TVE always remained below the maximum 1% limit for both P-class and M-class compliance, and for step changes in magnitude and phase angle.
Table 1 presents the response time, the delay time, and the overshoots/undershoots for TVE, FE, and RFE for ±10% and ±10° step changes in magnitude and phase angle, respectively, for P-class compliance and a reporting rate
Fs = 50. The maximum response time, delay time, and overshoot are defined in Tables 9 and 10 of [
2]. In the case of TVE and FE, the response time with the 13-state EKF was zero because the magnitude of both indices was always below the limits defined for P-class and M-class compliance. The maximum response time for RFE (6/
f0, i.e., 0.12 s for a 50 Hz system, for the step change in magnitude and phase angle in P-class, and 14/
Fs, i.e., 0.28 s for
Fs = 50, for both step change tests in M-class) was not surpassed in any of the tests.
The results obtained show the high responsiveness and good estimation of step inputs of our method, with short response times and small overshoot.
4. Transient Detection
This section outlines an important additional feature of the method proposed: the real-time detection of sudden transients in the input signal using the residuals of the Kalman filter. In a Kalman filter, the residual εk, defined in Equation (2), reflects the difference between the actual measurement at instant k, zk, and the predicted measurement Hkx’k. This difference was computed in each step of the adaptive algorithm. A zero magnitude of the residual εk implies total agreement between the measurement and the prediction, whereas a sudden change in magnitude appears when a sudden mismatch occurs between the two, as was the case in the beginning of a transient condition in the signal under analysis. Large sudden changes in a signal produce larger magnitudes in the residuals εk.
The transient detection capability of the residuals depends on both the magnitude of the transient and the detection threshold selected. The detection of a transient condition enables the flagging of the estimation for its adequate processing and represents an important contribution of our method.
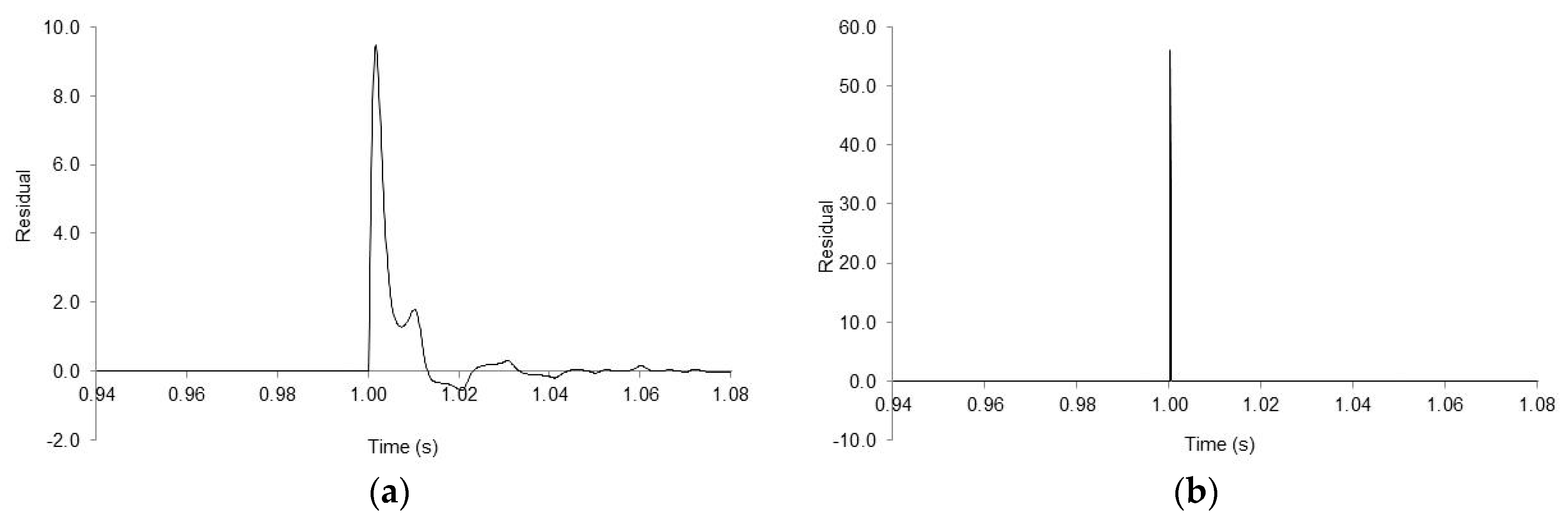
As an example of the capability of our method for step transient detection in the input signal,
Figure 6a,b show the evolution of the residual
εk during the +10% step change in magnitude and +10° step change in phase angle tests, respectively. A sudden change in magnitude of the residual
εk can be observed at the beginning of the two step changes.
Reference [
25] demonstrated the performance of their method in the detection of other important transient conditions in voltage or current waveforms in power systems, such as voltage dips and short interruptions, high-frequency transients, time varying harmonics and power swings, as well as the procedure for the most adequate selection of the transient detection threshold.
5. Conclusions
In this paper, we presented the application of an Extended Kalman Filter for instantaneous dynamic phasor and frequency estimation, which includes fundamental and harmonic components, compliant with the dynamic requirements of the IEEE synchrophasor measurement standards. The estimates are instantaneous and updated with each new sample of the signal under analysis. The filter parameters are adapted on-line with each new estimate of the power system frequency. The algorithm is robust against off-nominal frequencies and power swings, has accurate convergence during the frequency ramp tests, and shows high responsiveness and good estimation to step inputs, with short response times and small overshoot. Simultaneous with the estimation of the phasor magnitude and phase angle and frequency, the method can detect a step change in the input signal using the residual of the filter in real-time, which enables the flagging of the estimation for suitable processing.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}