Linear Hybrid Reluctance Motor with High Density Force


Abstract
1. Introduction
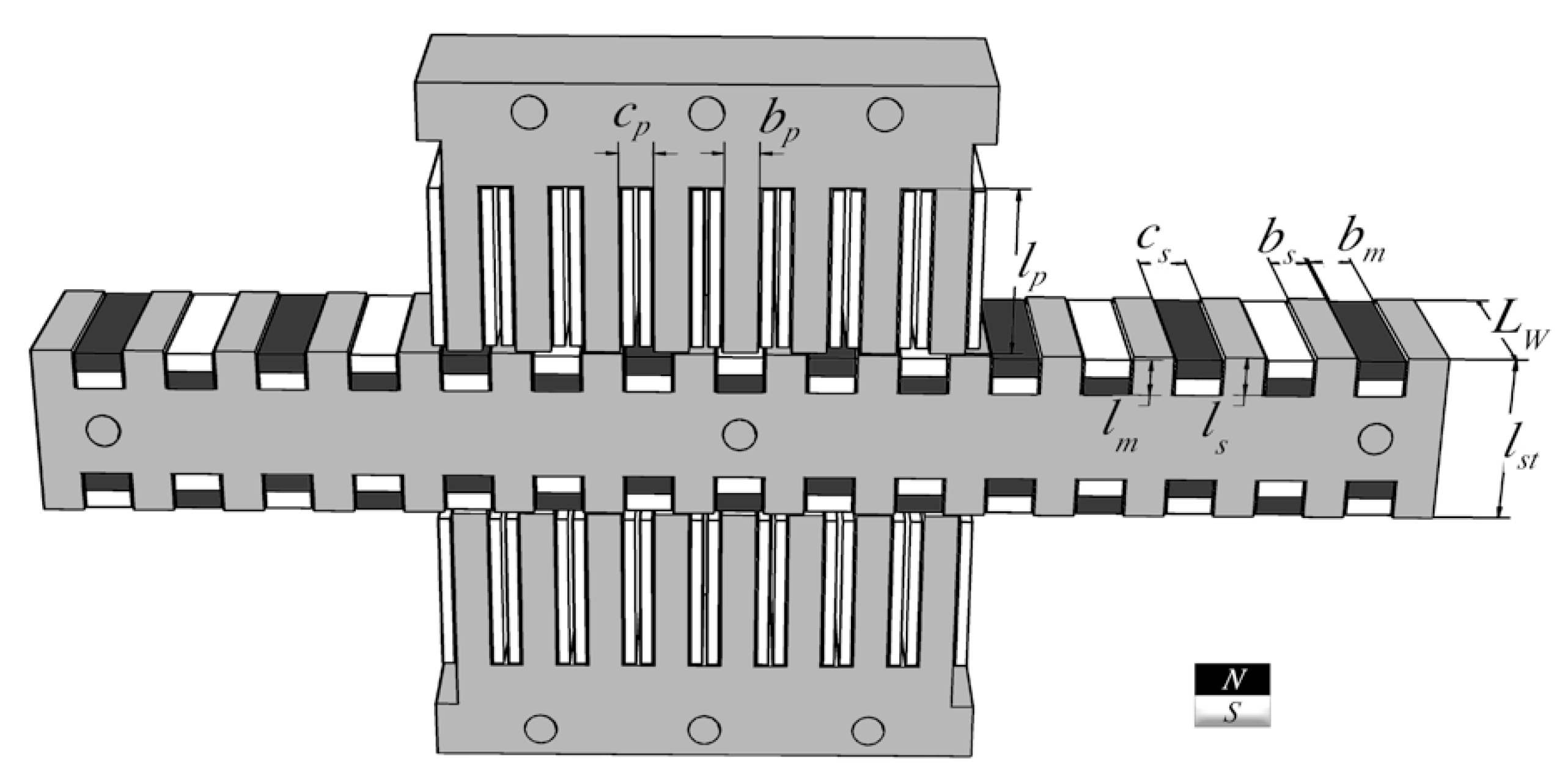
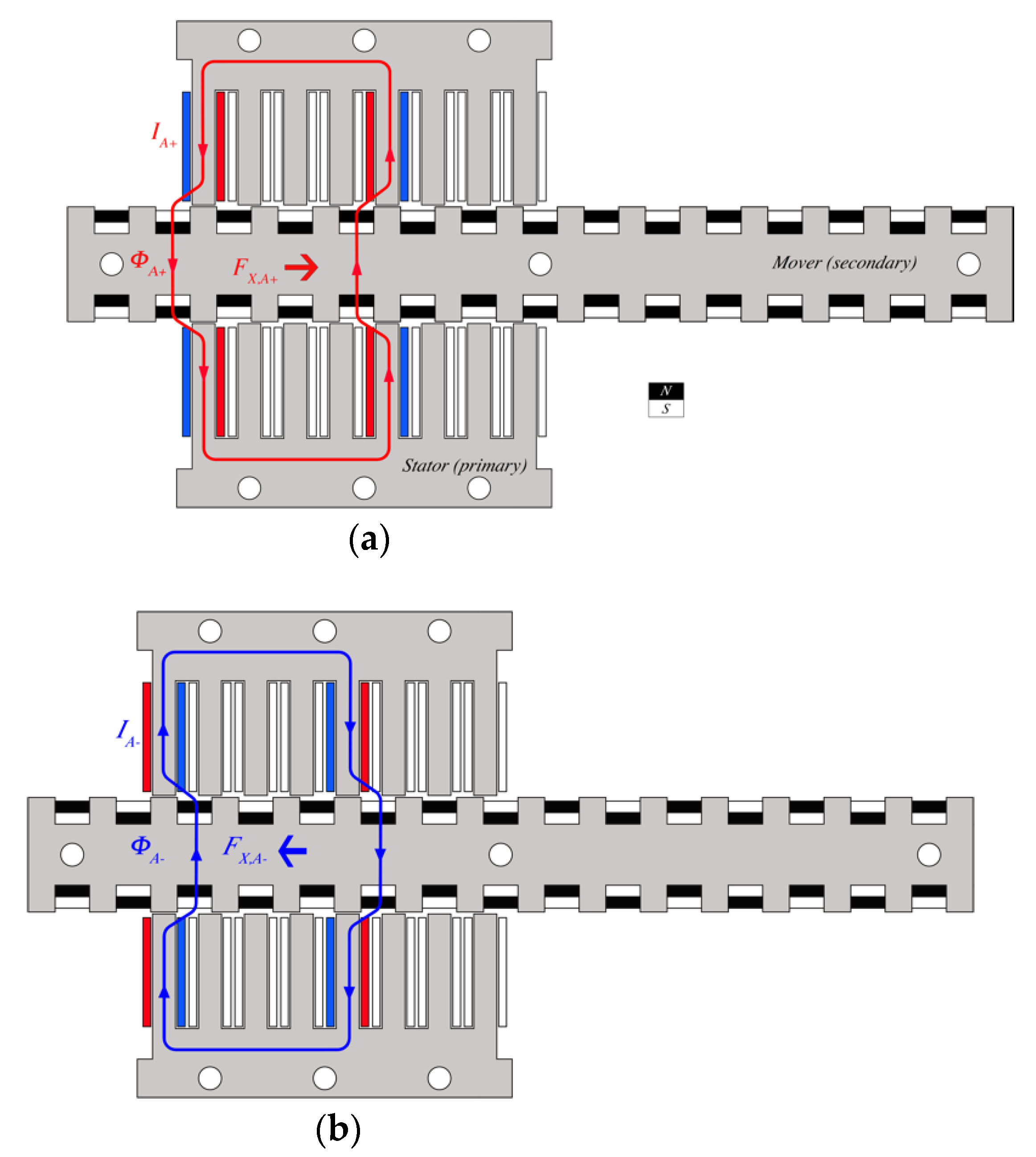
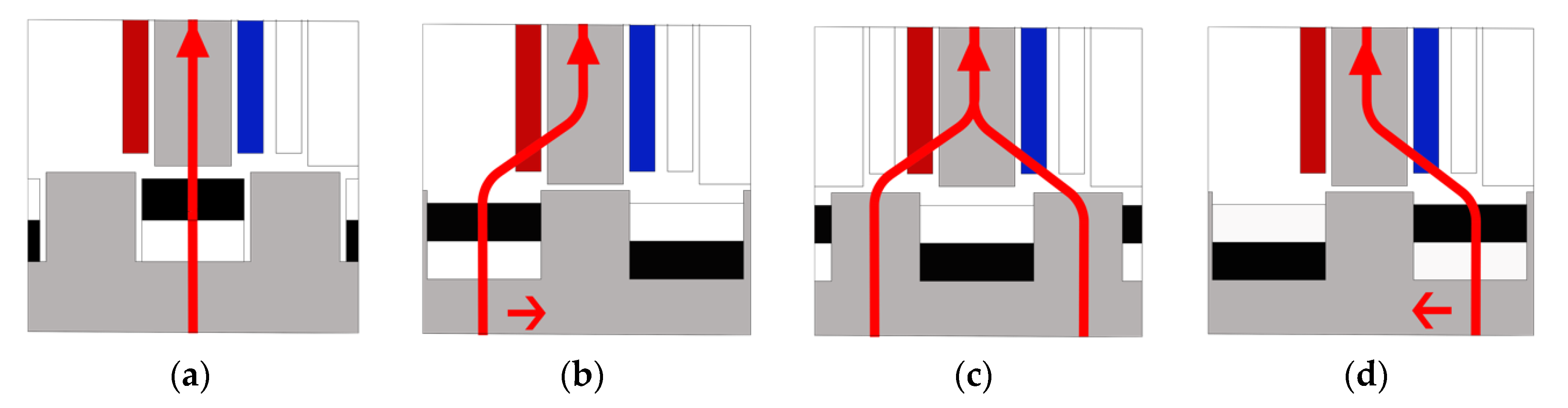
2. Linear Hybrid Reluctance Motor Structure and Operation Principle
3. Mathematical Model Equations
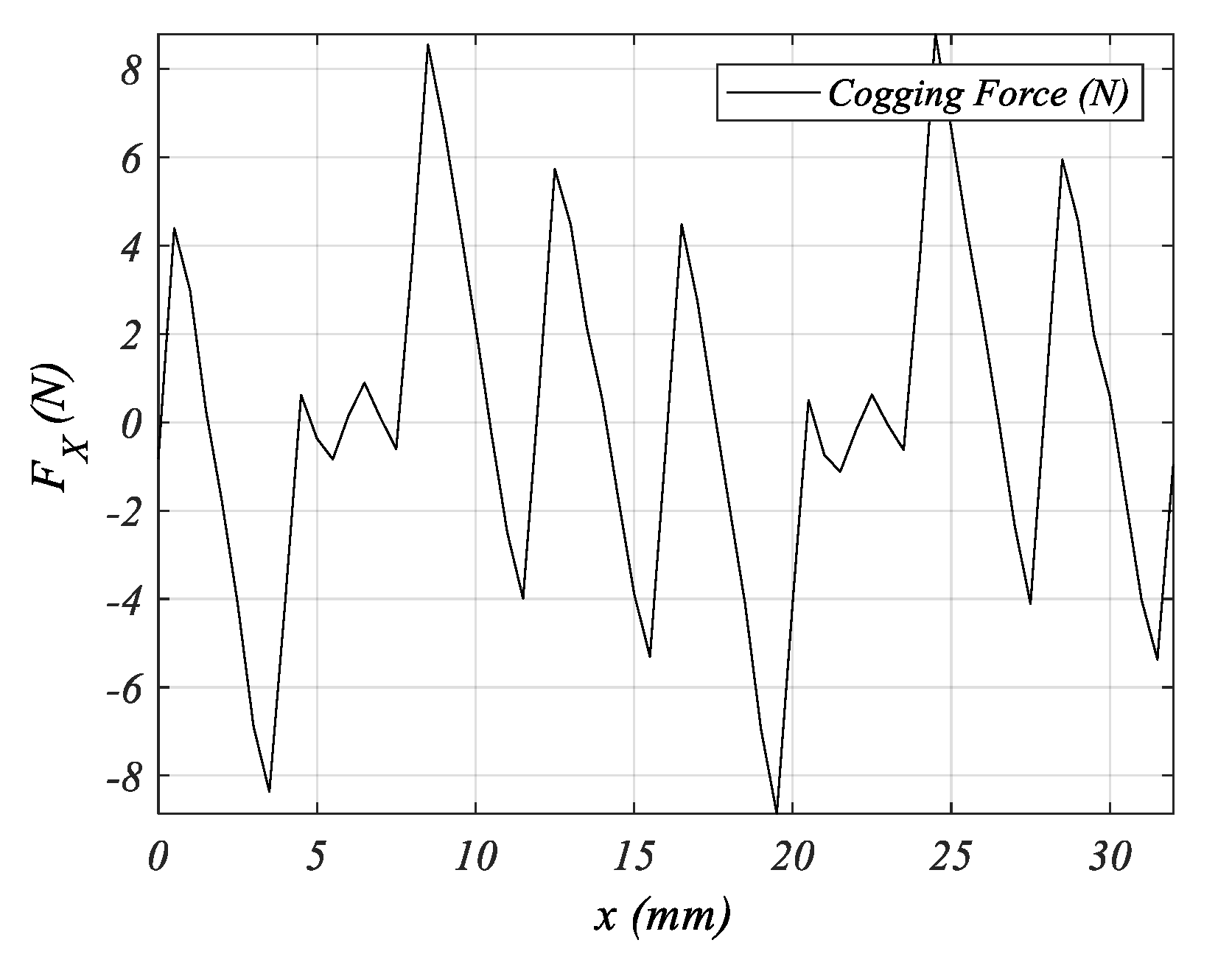
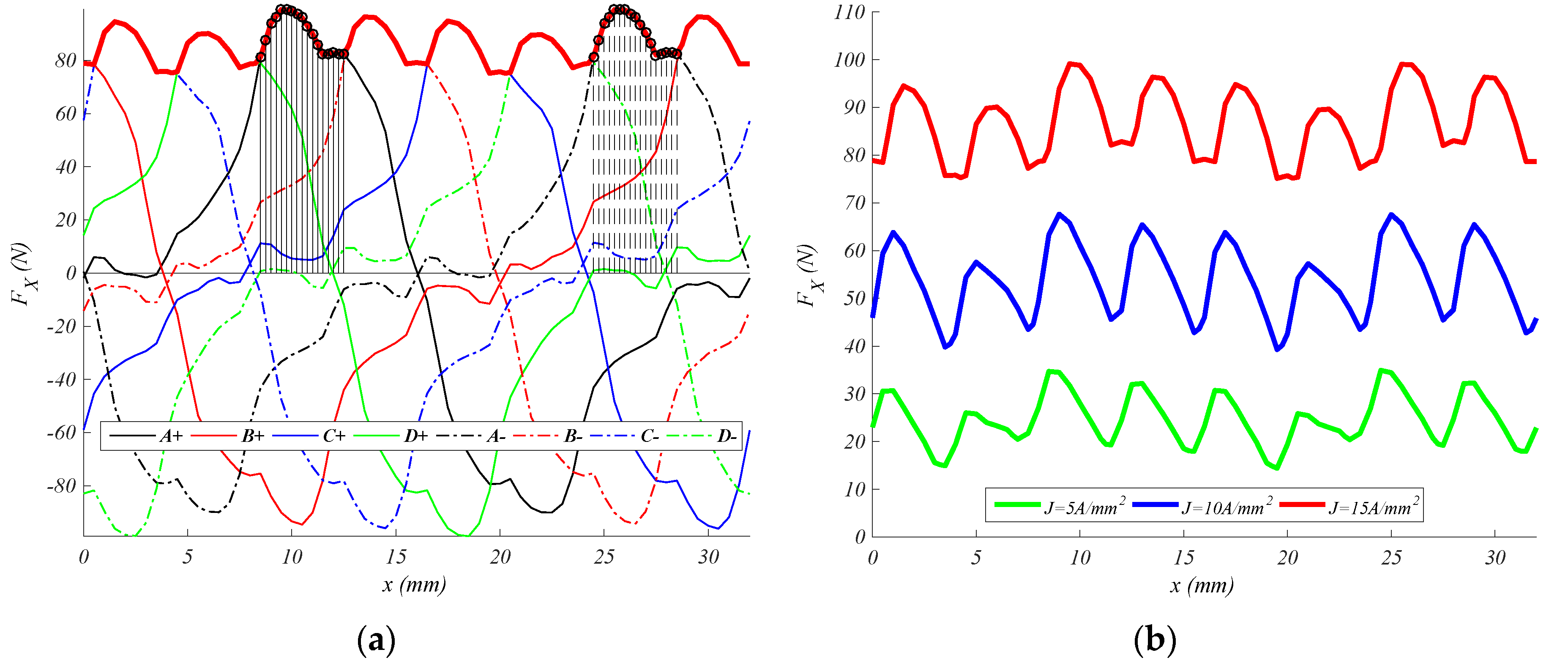
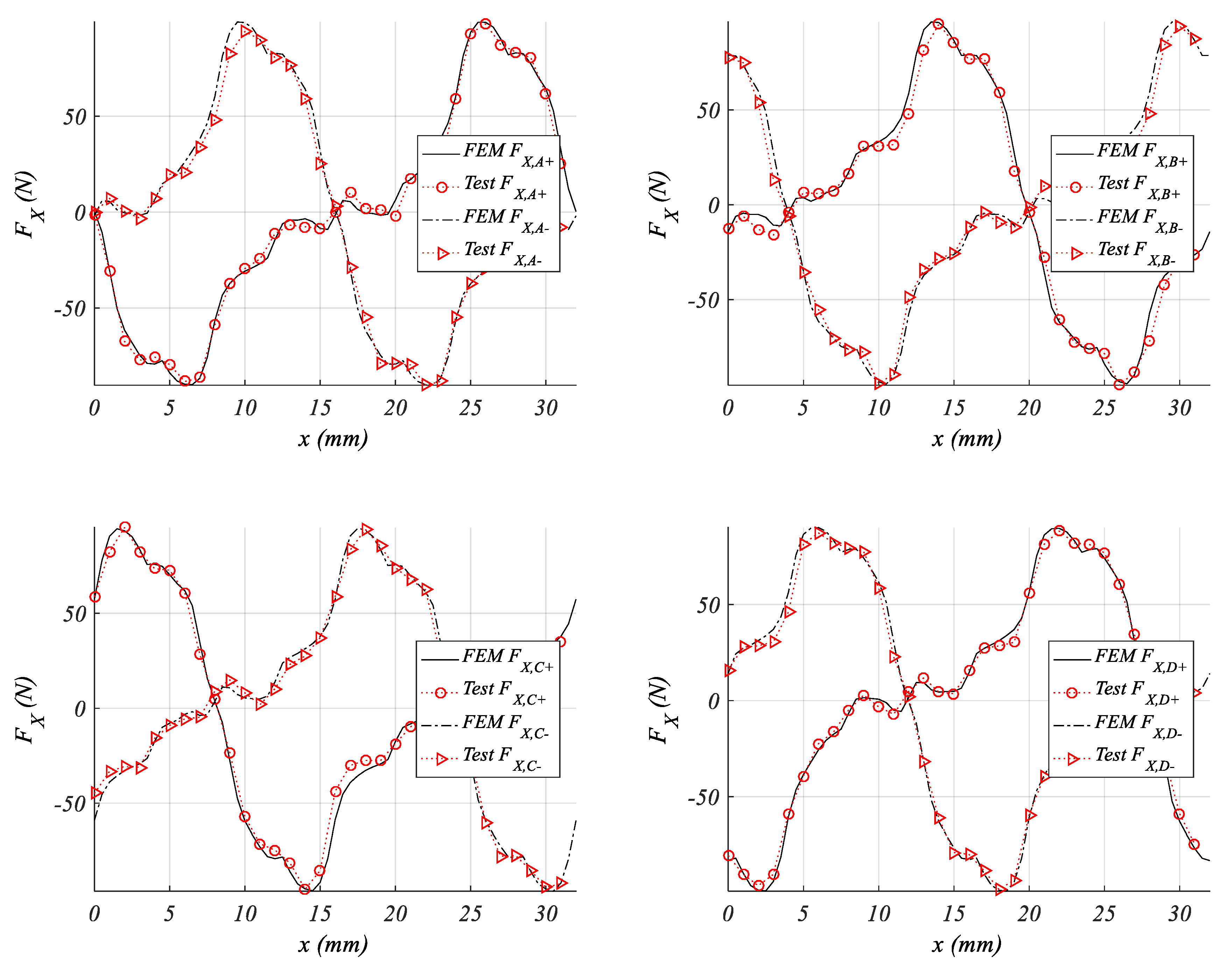
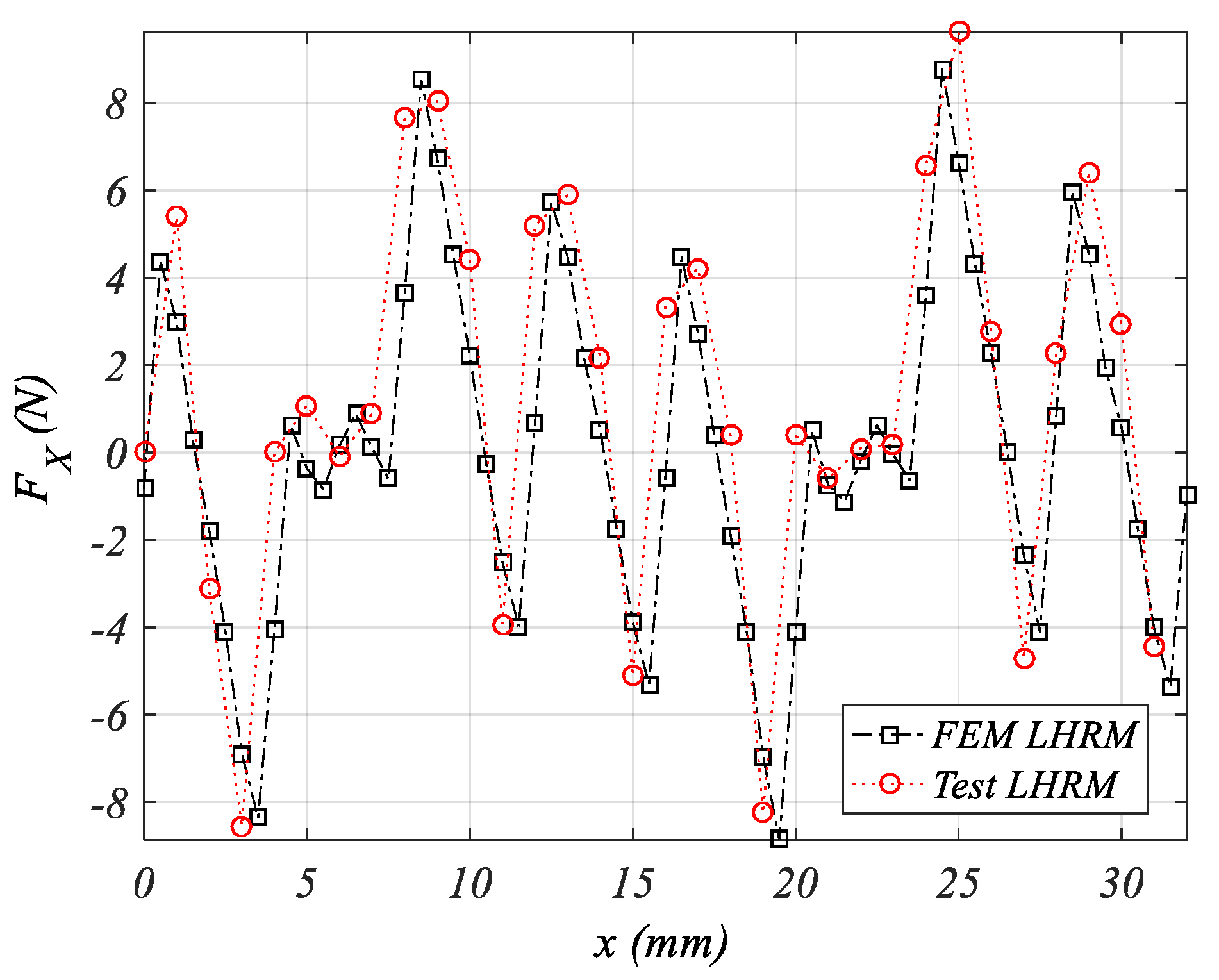
4. Finite Element Analysis Results
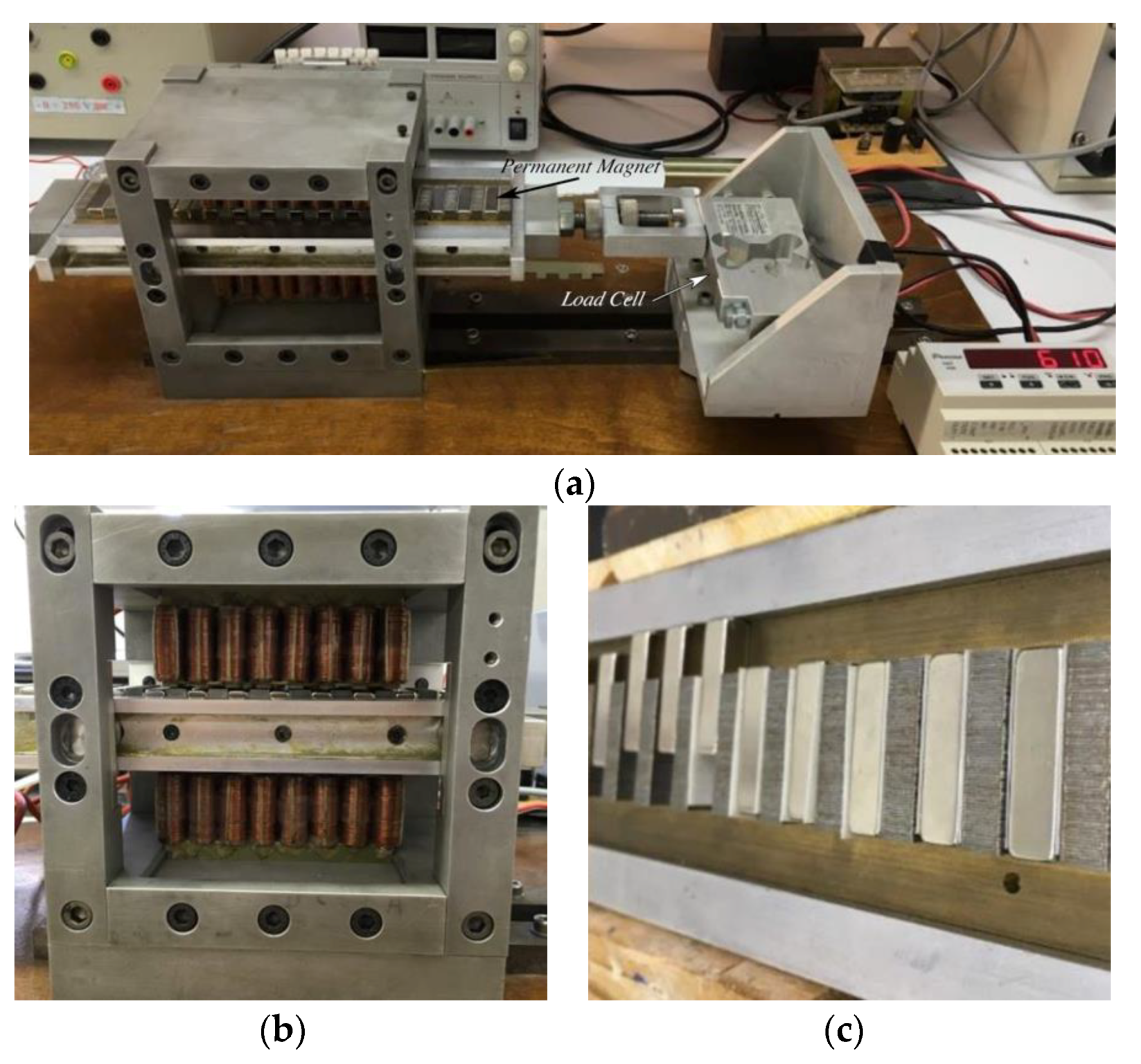
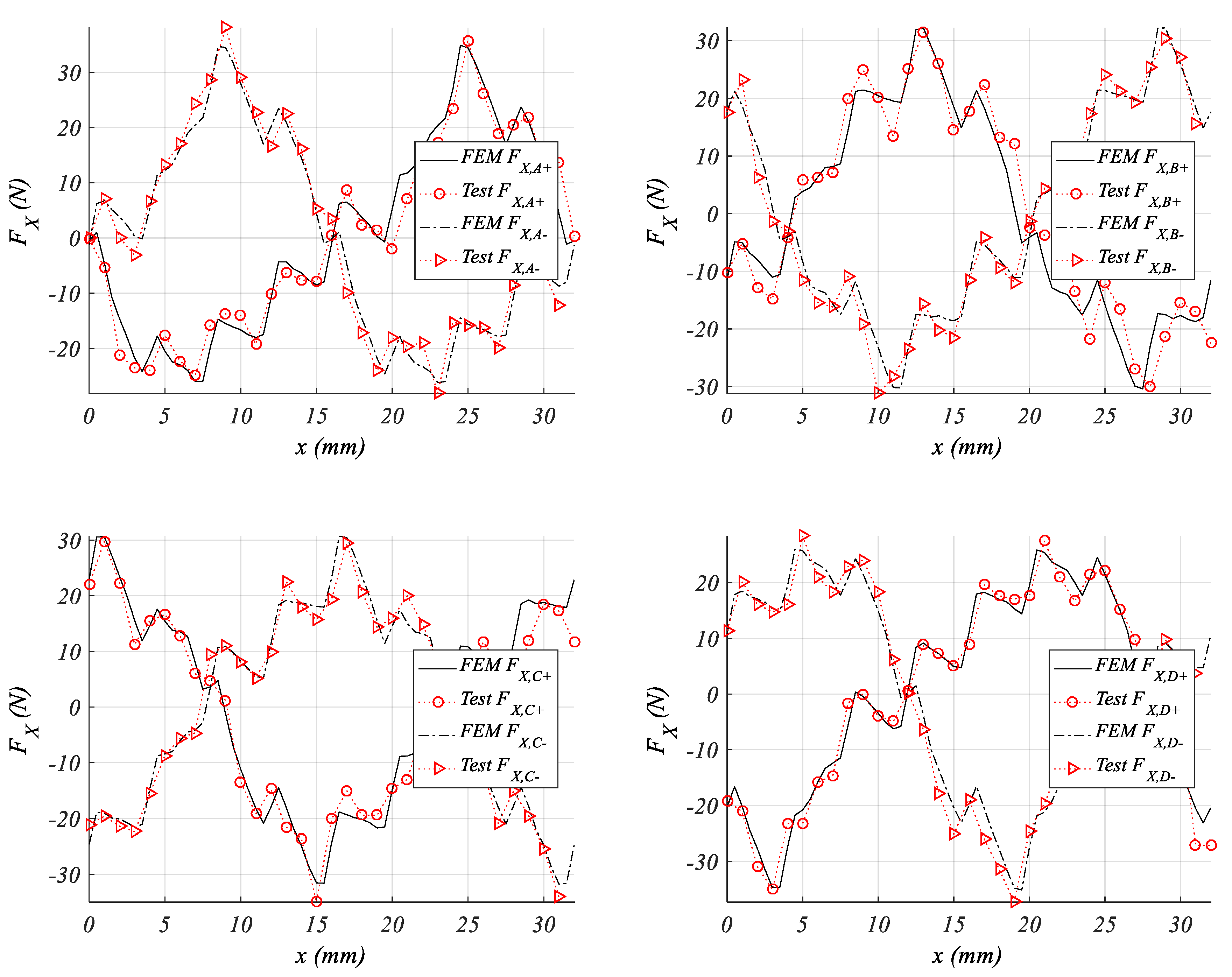
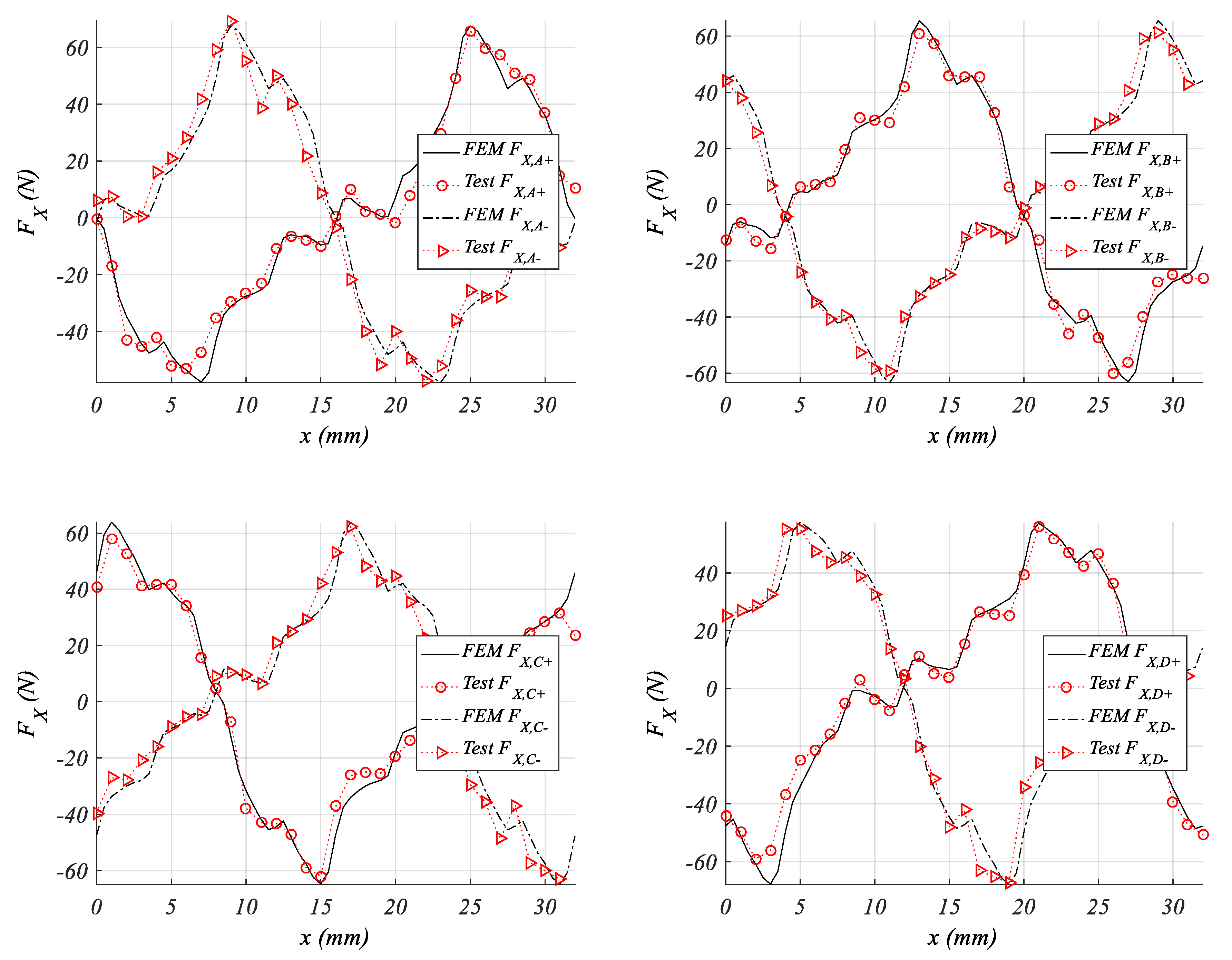
5. Experimental Results
6. Conclusions and Discussion
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Primary pole width | 6 mm | |
| Primary slot width | 6 mm | |
| Primary pole length | 30 mm | |
| Secondary pole width | 7 mm | |
| Secondary slot width | 9 mm | |
| Secondary pole length | 7 mm | |
| Mover height | 30 mm | |
| Magnet width | 8 mm | |
| Magnet height | 6.5 mm | |
| Stack width | 30 mm | |
| Air gap length | g | 0.5 mm |
| Phase wire diameter | d | 0.5 mm |
| Number of wires per pole | Nph | 180 |
| Rated voltage | Ub | 120 V |
| Rated current | Ib | 3 A |
| Rated power | Pb | 150 W |
| Rated force | FX | 90 N |
| Rated speed | ub | 1.5 m/s |
| Duty cycle | DC | 0.4 |
| Magnetic steel grade | FeV 270/50 HA | |
| Insulation grade | B-Class | |
| Duty type | S3 | |
| Permanent Magnet | NdFeB32 | |
References
- Zhang, B.; Yuan, J.; Pan, J.; Wu, X.; Luo, J.; Qiu, L. Controllability and Leader-Based Feedback for Tracking the Synchronization of a Linear-Switched Reluctance Machine Network. Energies 2017, 10, 1728. [Google Scholar] [CrossRef]
- Andrada, P.; Blanque, B.; Martinez, E.; Perat, J.I.; Sanchez, J.A.; Torrent, M. Environmental and life cycle cost analysis of one switched reluctance motor drive and two inverter-fed induction motor drives. IET Electr. Power Appl. 2012, 6, 390–398. [Google Scholar] [CrossRef]
- Chen, H.; Nie, R.; Yan, W.A. Novel Structure Single-Phase Tubular Switched Reluctance Linear Motor. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Zhao, W.; Zheng, J.; Wang, J.; Liu, G.; Zhao, J.; Fang, Z. Design and Analysis of a Linear Permanent- Magnet Vernier Machine with Improved Force Density. IEEE Trans. Ind. Electr. 2016, 63, 2072–2082. [Google Scholar] [CrossRef]
- Enrici, P.; Dumas, F.; Ziegler, N.; Matt, D. Design of a High-Performance Multi-Air Gap Linear Actuator for Aeronautical Applications. IEEE Trans. Energy Convers. 2016, 31, 896–905. [Google Scholar] [CrossRef]
- Pan, J.F.; Wang, W.; Zhang, B.; Cheng, E.; Yuan, J.; Qiu, L.; Wu, X. Complimentary Force Allocation Control for a Dual-Mover Linear Switched Reluctance Machine. Energies 2018, 11, 23. [Google Scholar] [CrossRef]
- Andrada, P.; Blanqué, B.; Martínez, E.; Torrent, M.; Garcia-Amorós, J.; Perat, J.I. New Linear Hybrid Reluctance Actuator. In Proceedings of the International Conference on Electrical Machines (ICEM), Berlin, Germany, 1–4 September 2014. [Google Scholar]
- Andrada, P.; Blanque, B.; Martinez, E.; Torrent, M. A Novel Type of Hybrid Reluctance Motor Drive. IEEE Trans. Ind. Electr. 2014, 61, 4337–4345. [Google Scholar] [CrossRef]
- Ullah, S.; McDonald, S.; Martin, R.; Atkinson, G.J. A permanent magnet assisted switched reluctance machine for more electric aircraft. In Proceedings of the International Conference on Electrical Machines (ICEM), Lausanne, Switerland, 4–7 September 2016. [Google Scholar]
- Hwang, H.; Hur, J.; Lee, C. Novel permanent-magnet-assisted switched reluctance motor (I): Concept, design, and analysis. In Proceedings of the International Conference on Electrical Machines and Systems (ICEMS), Busan, Korea, 23–29 October 2013. [Google Scholar]
- Hua, W.; Cheng, M.; Zhu, Z.Q.; Howe, D. Analysis and Optimization of Back EMF Waveform of a Flux-Switching Permanent Magnet Motor. IEEE Trans. Energy Convers. 2008, 23, 727–733. [Google Scholar] [CrossRef]
- Hasegawa, Y.; Nakamura, K.; Ichinokura, O. Basic consideration of switched reluctance motor with auxiliary windings and permanent magnets. In Proceedings of the International Conference on Electrical Machines (ICEM), Marseille, France, 2–5 September 2012. [Google Scholar]
- Ding, W.; Yang, S.; Hu, Y.; Li, S.; Wang, T.; Yin, Z. Design Consideration and Evaluation of a 12/8 High-Torque Modular-Stator Hybrid Excitation Switched Reluctance Machine for EV Applications. IEEE Trans. Ind. Electr. 2017, 64, 9221–9232. [Google Scholar] [CrossRef]
- Afinowi, I.A.A.; Zhu, Z.Q.; Guan, Y.; Mipo, J.C.; Farah, P. Hybrid-Excited Doubly Salient Synchronous Machine with Permanent Magnets Between Adjacent Salient Stator Poles. IEEE Trans. Magn. 2015, 51, 1–9. [Google Scholar] [CrossRef]
- Lobo, N.S.; Lim, H.S.; Krishnan, R. Comparison of Linear Switched Reluctance Machines for Vertical Propulsion Application: Analysis, Design, and Experimental Correlation. IEEE Trans. Ind. Appl. 2008, 44, 1134–1142. [Google Scholar] [CrossRef]
- Lee, S.; Kim, S.; Saha, S.; Zhu, Y.; Cho, Y. Optimal Structure Design for Minimizing Detent Force of PMLSM for a Ropeless Elevator. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Lin, J.; Cheng, K.W.E.; Zhang, Z.; Cheung, N.C.; Xue, X. Adaptive sliding mode technique-based electromagnetic suspension system with linear switched reluctance actuator. IET Electr. Power Appl. 2015, 9, 50–59. [Google Scholar] [CrossRef]
- Chen, Y.; Cao, M.; Ma, C.; Feng, Z. Design and Research of Double-Sided Linear Switched Reluctance Generator for Wave Energy Conversion. Appl. Sci. 2018, 8, 1700. [Google Scholar] [CrossRef]
- Wang, M.; Li, L.; Pan, D. Detent Force Compensation for PMLSM Systems Based on Structural Design and Control Method Combination. IEEE Trans. Ind. Electr. 2015, 62, 6845–6854. [Google Scholar] [CrossRef]
- Hao, W.; Wang, Y. Comparison of the Stator Step Skewed Structures for Cogging Force Reduction of Linear Flux Switching Permanent Magnet Machines. Energies 2018, 11, 2172. [Google Scholar] [CrossRef]
- Hasanien, H.M. Particle Swarm Design Optimization of Transverse Flux Linear Motor for Weight Reduction and Improvement of Thrust Force. IEEE Trans. Ind. Electr. 2011, 58, 4048–4056. [Google Scholar] [CrossRef]
- Huang, X.; Tan, Q.; Wang, Q.; Li, J. Optimization for the Pole Structure of Slot-Less Tubular Permanent Magnet Synchronous Linear Motor and Segmented Detent Force Compensation. IEEE Trans. Appl. Supercond. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Amorós, J.G.; Andrada, P.; Blanque, B.; Marin-Genesca, M. Influence of Design Parameters in the Optimization of Linear Switched Reluctance Motor under Thermal Constraints. IEEE Trans. Ind. Electr. 2018, 65, 1875–1883. [Google Scholar] [CrossRef]
- Garcia-Amoros, J.; Molina, B.B.; Andrada, P. Modelling and simulation of a linear switched reluctance force actuator. IET Electr. Power Appl. 2013, 7, 350–359. [Google Scholar] [CrossRef]
- Meeker, D.C. Finite Element Method Magnetics, Version 4.2 (28 February 2018 Build). Available online: http://www.femm.info (accessed on 16 October 2018).
- Henrotte, F.; Deliège, G.; Hameyer, K. The eggshell method for the computation of electromagnetic forces on rigid bodies in 2D and 3D. In Proceedings of the Conference on Electromagnetic Field Computation CEFC, Perugia, Italy, 16–18 April 2002. [Google Scholar]
- Nogueira, A.F.L. Analysis of magnetic force production in slider actuators combining analytical and finite element methods. J. Microw. Optoelectron. Electromagn. Appl. 2011, 10, 243–250. [Google Scholar] [CrossRef]
- Schramm, D.S.; Williams, B.W.; Green, T.C. Torque ripple reduction of switched reluctance motors by phase current optimal profiling. In Proceedings of the Conference on IEEE Power Electronics Specialists Conference. PESC’92 Record, Toledo, Spain, 29 June–3 July 1992. [Google Scholar]
- Dorningos, J.L.; Andrade, D.A.; Freitas, M.A.A.; De Paula, H. A new drive strategy for a linear switched reluctance motor. In Proceedings of the Conference on IEEE International Electric Machines and Drives IEMDC’03, Madison, WI, USA, 1–4 June 2003. [Google Scholar]















| Phase-A, | LHRM | LSRM | |
|---|---|---|---|
| 1 | 42 | 23.1 | 82 |
| 1 | −43.2 | −23.1 | 87 |
| Positive peak force (N) | 99.1 | 35.2 | 181 |
| Negative peak force (N) | −90 | −35 | 157 |
| J | |||||
|---|---|---|---|---|---|
| 42 | 45.7 | 42.9 | 42 | 2.93 | |
| −43.2 | −42.7 | −45.5 | −42 | −2.91 | |
| Positive peak force (N) | 99.1 | 96.4 | 94.8 | 90.1 | 8.8 |
| Negative peak force (N) | −90 | -94.6 | −96.2 | −99 | −8.8 |
| Excited Phase | ||
|---|---|---|
| A + | 8.5 mm | 12.5 mm |
| B + | 28.75 mm | 0.5 mm |
| C + | 16.75 mm | 20.25 mm |
| D + | 4.5 mm | 8.75 mm |
| A − | 24.5 mm | 28.5 mm |
| B − | 12.75 mm | 16.5 mm |
| C − | 0.75 mm | 4.25 mm |
| D − | 20.5 mm | 24.25 mm |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garcia-Amorós, J. Linear Hybrid Reluctance Motor with High Density Force. Energies 2018, 11, 2805. https://doi.org/10.3390/en11102805
Garcia-Amorós J. Linear Hybrid Reluctance Motor with High Density Force. Energies. 2018; 11(10):2805. https://doi.org/10.3390/en11102805
Chicago/Turabian StyleGarcia-Amorós, Jordi. 2018. "Linear Hybrid Reluctance Motor with High Density Force" Energies 11, no. 10: 2805. https://doi.org/10.3390/en11102805
APA StyleGarcia-Amorós, J. (2018). Linear Hybrid Reluctance Motor with High Density Force. Energies, 11(10), 2805. https://doi.org/10.3390/en11102805