1. Introduction
Nowadays, Chinese high-speed electric multiple units (EMU) demand a power more than 20 MW for maximum speeds of up to 350 km/h. With the advantages of longer feeding distance, lower voltage loss, and less electromagnetic interference, all parallel AT TPSS is widely applied to high-speed railways [
1,
2,
3]. According to the Chinese railway plan, there will be 38,000 km high-speed railways in China by 2025 [
4].
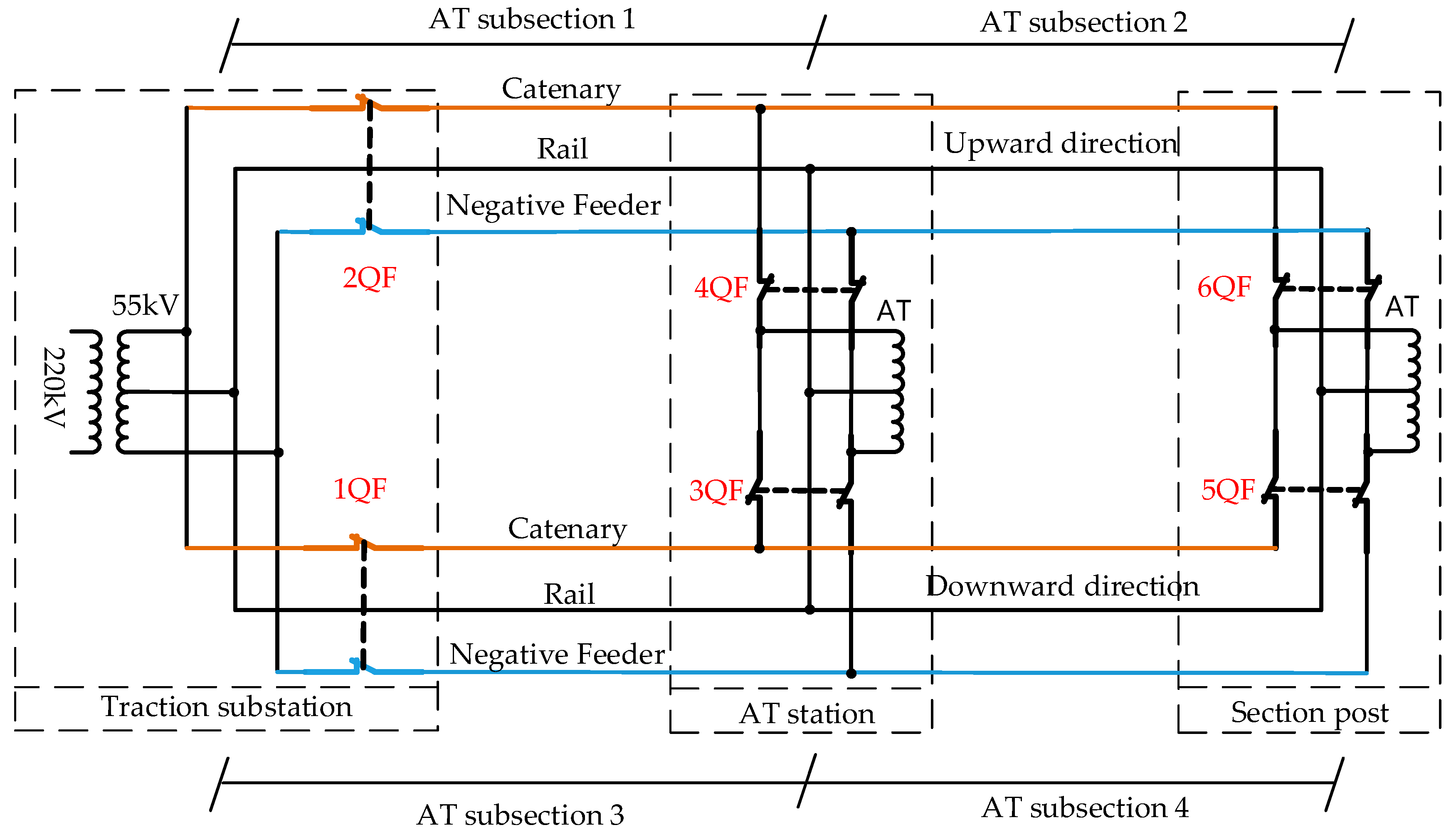
In AT TPSS, the traction substation (TS) delivers energy to EMUs by means of a double wire (catenary and negative feeder) system. The voltage between the catenary and negative feeder is 55 kV. The voltage between the catenary and the rail is 27.5 kV as is the voltage between the rail and the negative feeder. The TPSS is generally delimited as several AT subsections by AT station (ATS). The AT terminals are connected to bus bars of the catenary and negative feeder, whereas its middle winding point is connected to the rail. At the end of the TPSS, another AT station is called the section post (SP), where an AT is connected in a similar way [
5,
6].
All parallel AT TPSS consists of two AT TPSSs. One of them is described as the upward direction and the other is described as the downward direction. To obtain further feeding ability, the upward direction and downward direction are parallel-connected to the bus bars in the TS, ATS, and SP [
7]. In
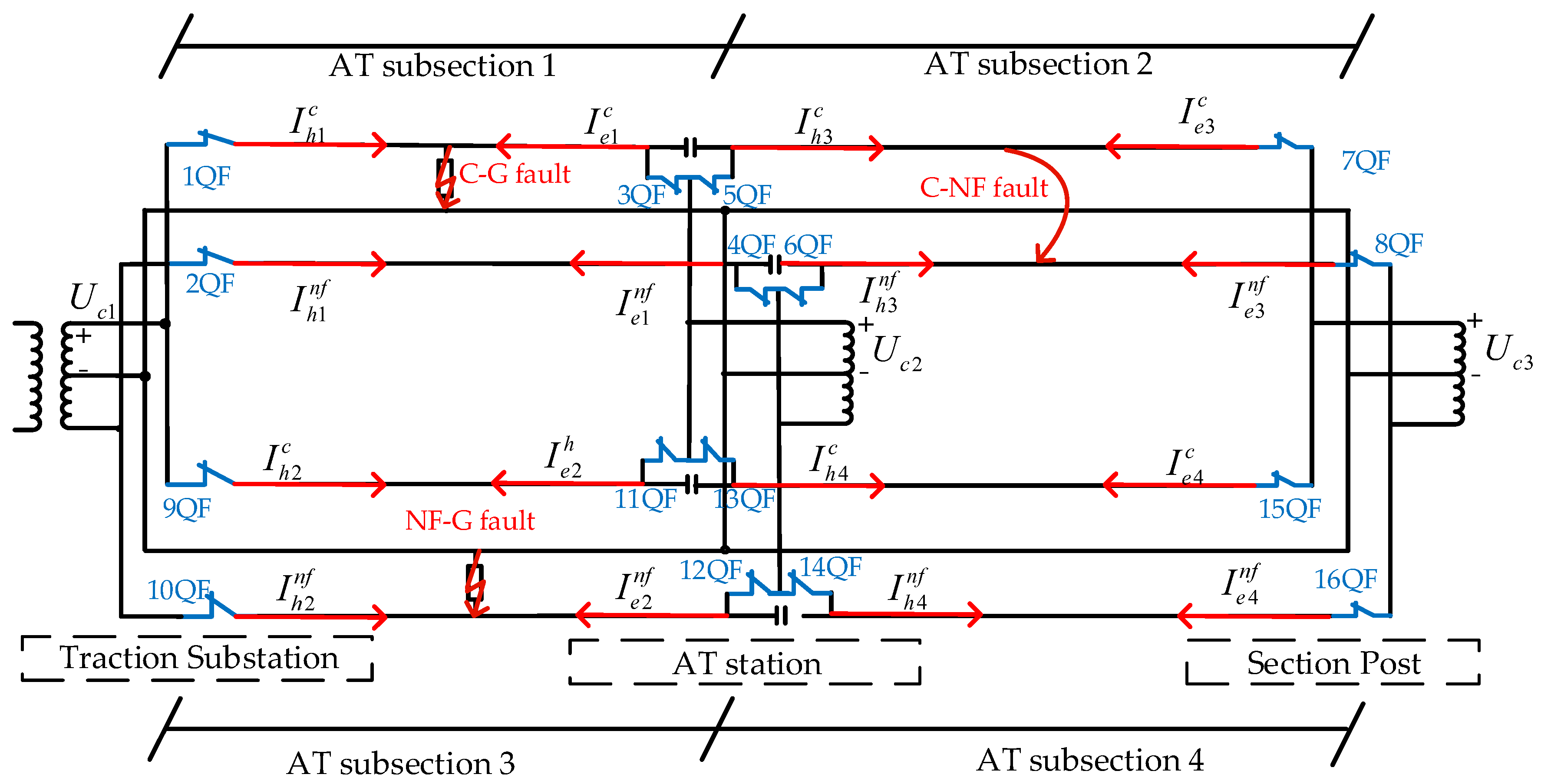
Figure 1, the conventional all parallel AT TPSS with four AT subsections is illustrated. The double pole circuit breakers 1QF and 2QF are connected to the catenary and negative feeder in series in the TS. The AT are connected to the catenary and negative feeder though the double pole circuit breakers 3QF and 4QF in the ATS. Through the connection of the circuit breakers 5QF and 6QF, the AT in the SP has the same installation structure as the AT in the ATS [
8].
However, compared to 1 × 25 kV TPSS, the structure of all parallel AT TPSS becomes more complex and is vulnerable to damage by natural or human factors [
9]. The fault types are a series of short circuits between catenary and ground (C-G short circuit fault), between the negative feeder and ground (NF-G short circuit fault), and between catenary and negative feeder (C-NF short circuit fault) [
10,
11]. From the fault resistance, the fault types are divided into low transition resistance faults and high transition resistance faults. A wide variety of fault types seriously jeopardize the safe operation of the whole TPSS. Thus, identifying the faults in a timely and accurate way, isolating them, and reducing the hazards of rail traffic are particularly significant [
12,
13].
When any short circuit fault occurs in the all parallel AT TPSS in
Figure 1, firstly, the circuit breakers 1QF and 2QF are tripped to interrupt the whole TPSS power. Then, 3QF–6QF are tipped to isolate the AT as a result of the voltage loss protection in the ATS and SP [
14]. From the view of reliability, the fault of any part in the wires will cause power outage of the whole TPSS, which is a typical series structure. The reason for this phenomenon is that only the circuit breakers 1QF and 2QF are connected to the wires in series and the circuit breakers 3QF–6QF and the ATs in series are parallel-connected to the wires. Therefore, the installation structure of circuit breakers causes that the conventional all parallel AT TPSS fails to switch each wire at the AT subsections on and off independently.
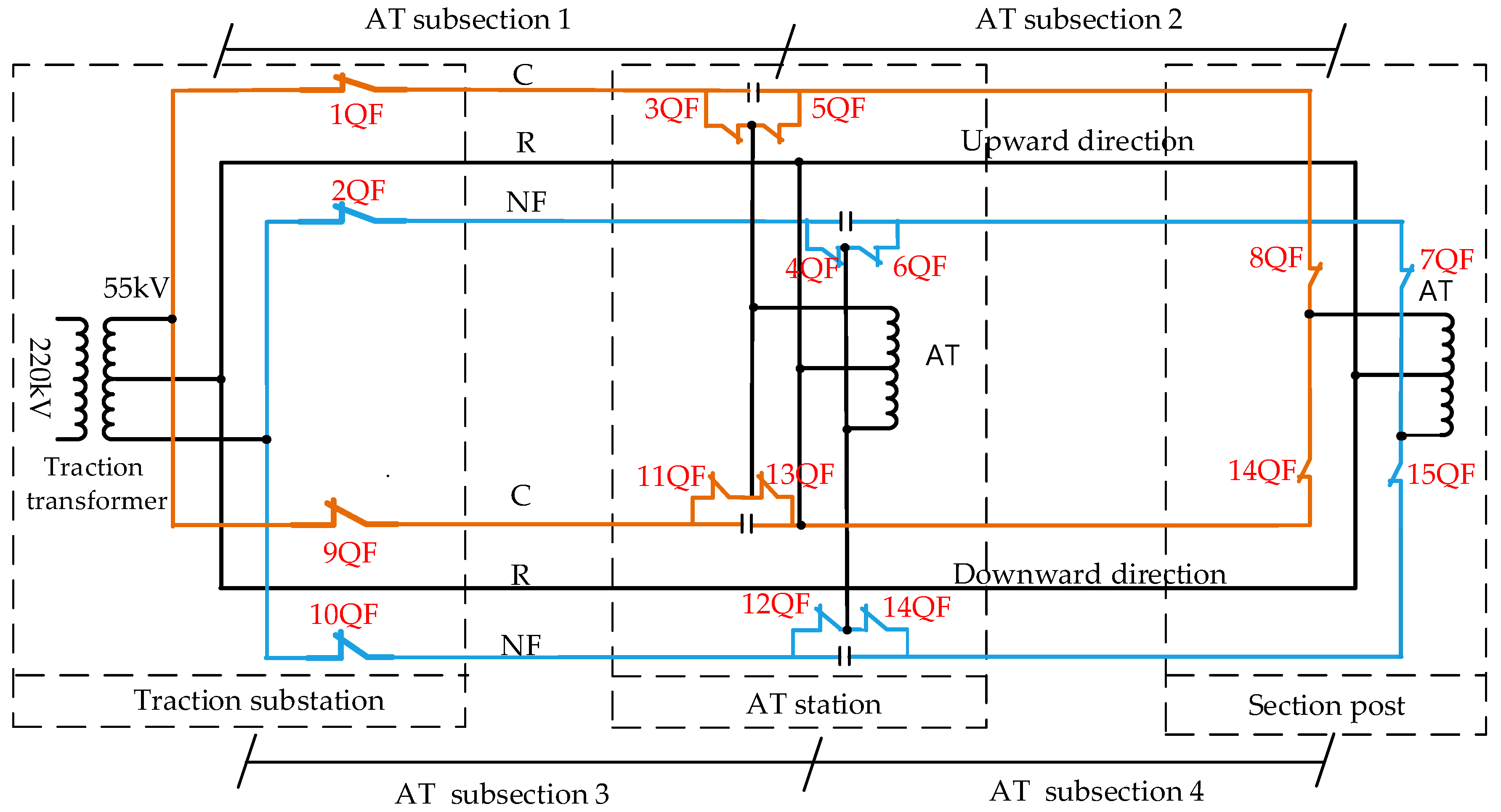
To avoid a fault creating the whole all parallel AT TPSS power outage, a novel segmental power supply scheme is proposed in a past paper [
15]. The single-pole circuit breakers are connected to both terminals of the wires at each AT subsection as shown in
Figure 2. Each wire could be controlled to switch on or off independently. If the fault type is known, only the wires where the fault is present at the subsection will be quickly removed from service, other subsections remain in service. Compared to the conventional structure of all parallel AT TPSS, the novel scheme imposes only a minimum hazard to rail traffic after the fault occurs [
16]. Therefore, the application of this scheme will immensely improve the reliability of all parallel AT TPPS.
The most widely used protection scheme of all parallel AT TPSS is based on single terminal impedance which was developed from 1 × 25 kV TPSS [
11,
17,
18]. In this scheme, distance relays are merely installed in the TS; one-terminal measuring impendence is used to identify fault [
14]. On the one hand, due to the widespread nature of ATs, the relationship between impedance and distance in the wire-ground fault is nonlinear [
19]. As a result, it is impossible to define the fault subsection when only the impedance is known [
20]. On the other hand, due to the symmetry between the C-G fault and NF-G fault, the distance relays lack the ability to figure out fault types [
6,
21]. In a past paper [
22], distance relays are installed in the TS, ATS, and SP to identify the fault subsection. Nevertheless, fault types are still not identified by multiterminals measuring impendence. In addition, with the increase of EMU power, the measuring impedance decreased [
15,
23] and the resistance set parameter of the high-speed railway becomes smaller. The ability of distance relays to avoid transition resistance is weakened, which threatens the safety operation of the TPSS.
For reduction of the power outage range, the method is proposed to identify and isolate the fault direction [
24]. In this method, the current ratio of the upward direction and downward direction in TS is applied. When the fault occurs at AT subsection 1 and AT subsection 3, this method is useful. However, when the fault occurs at other subsections, this method must be combined with the directional overcurrent relays installed in the ATS and SP to identify the fault.
In another past paper [
20], the method can identify the C-G fault and NF-G fault at the AT subsection. In this method, the current distribution under normal operation was regarded as the resistive load case, the short circuit current is similar to the inductive load case. The angles between the current and voltage, which are measured by the directional overcurrent relays installed in TS, ATS, and SP, serve to identify the fault. Unfortunately, the C-NF fault and how to isolate the wires and subsections are not mentioned.
An identification method based on segmental scheme is put forward in a previous work [
25]. Fault subsections and fault types can be distinguished by the power flow of both terminals of wires at each subsection. However, the high transition resistance fault is ignored and not discussed.
Table 1 lists these studies and compares the covered technologies, their functions, and the structure of TPSS.
In this paper, based on the segmental power supply scheme, the electrical characteristics distribution of all parallel AT TPSS is analyzed, and the new hybrid fault identification method with multiterminals synchronous measure information is described. The method allows an upper device, which analyzes the electrical information uploaded from the bottom devices, to identify the wires where the fault occurs in the AT subsection. After the fault is identified, the wires at the subsection are isolated independently; hence the impact of the fault is limited to a small degree. Accordingly, the safety and reliability of the TPSS can be improved significantly.
The rest of the paper is organized as follows.
Section 2 details electrical characteristics of all parallel AT TPSS,
Section 3 shows the principles of the proposed hybrid fault identification method,
Section 4 presents the analysis of the simulations developed with MATLAB® software (The MathWorks, Inc. 3 Apple Hill Drive Natick, MA, USA), and
Section 5 presents the results of the experimental tests carried out in the laboratory. Finally,
Section 6 concludes with the main contributions of the proposed method and the direction of future work.
2. Theoretical Analysis of the Current and Voltage Distribution
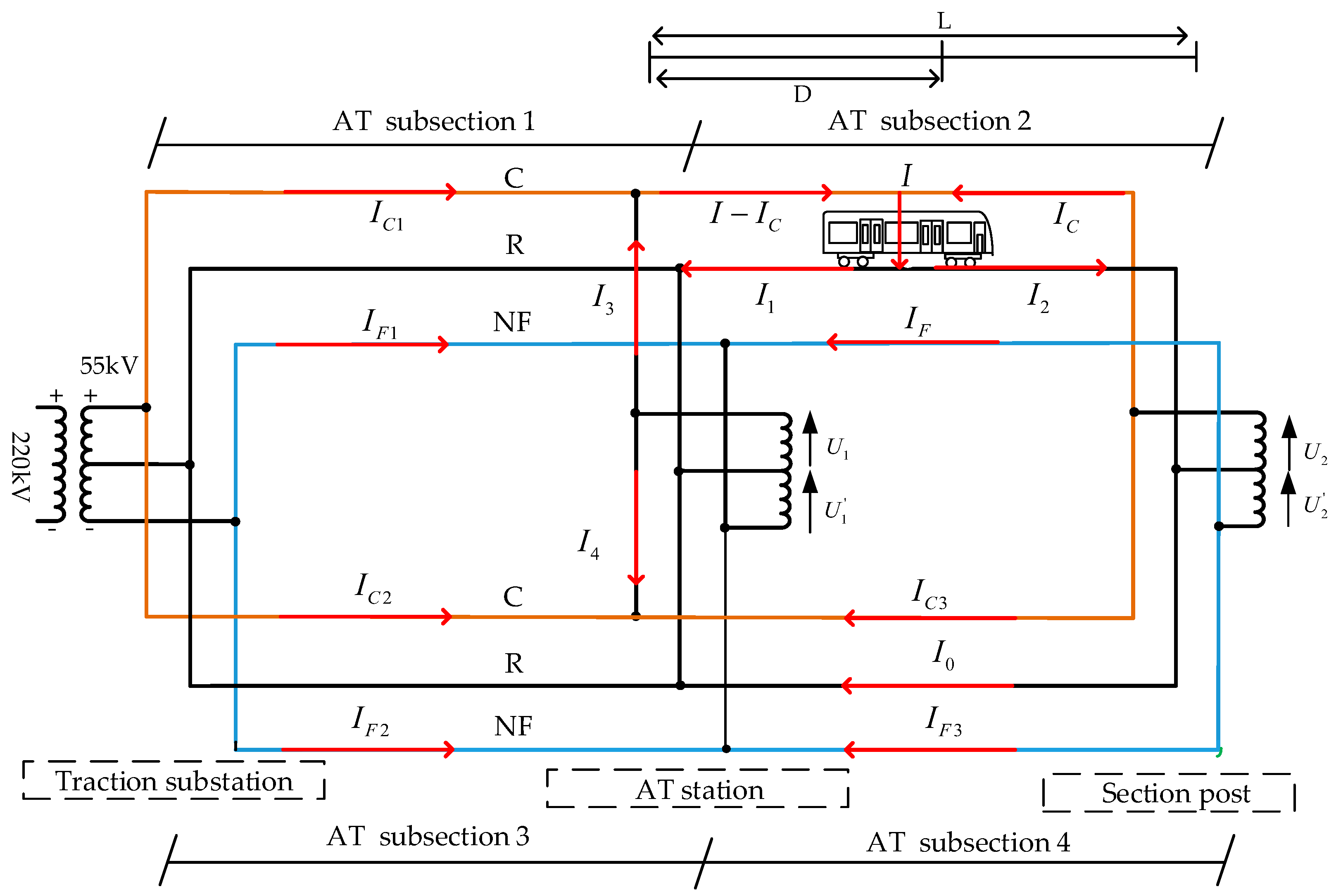
In
Figure 3, an EMU is delivered energy from the catenary through the pantograph at subsection 2. The distance from the EMU to the ATS is
km while the total distance of the second subsection is
km.
,
, and
are the self-impedance value per length unit of catenary, rail, and negative feeder, respectively.
,
, and
are the mutual-impedance value per length unit between them.
When the AT leakage impedance and the unsymmetrical distribution of the catenary and negative feeder impedance are ignored, some equations can be obtained:
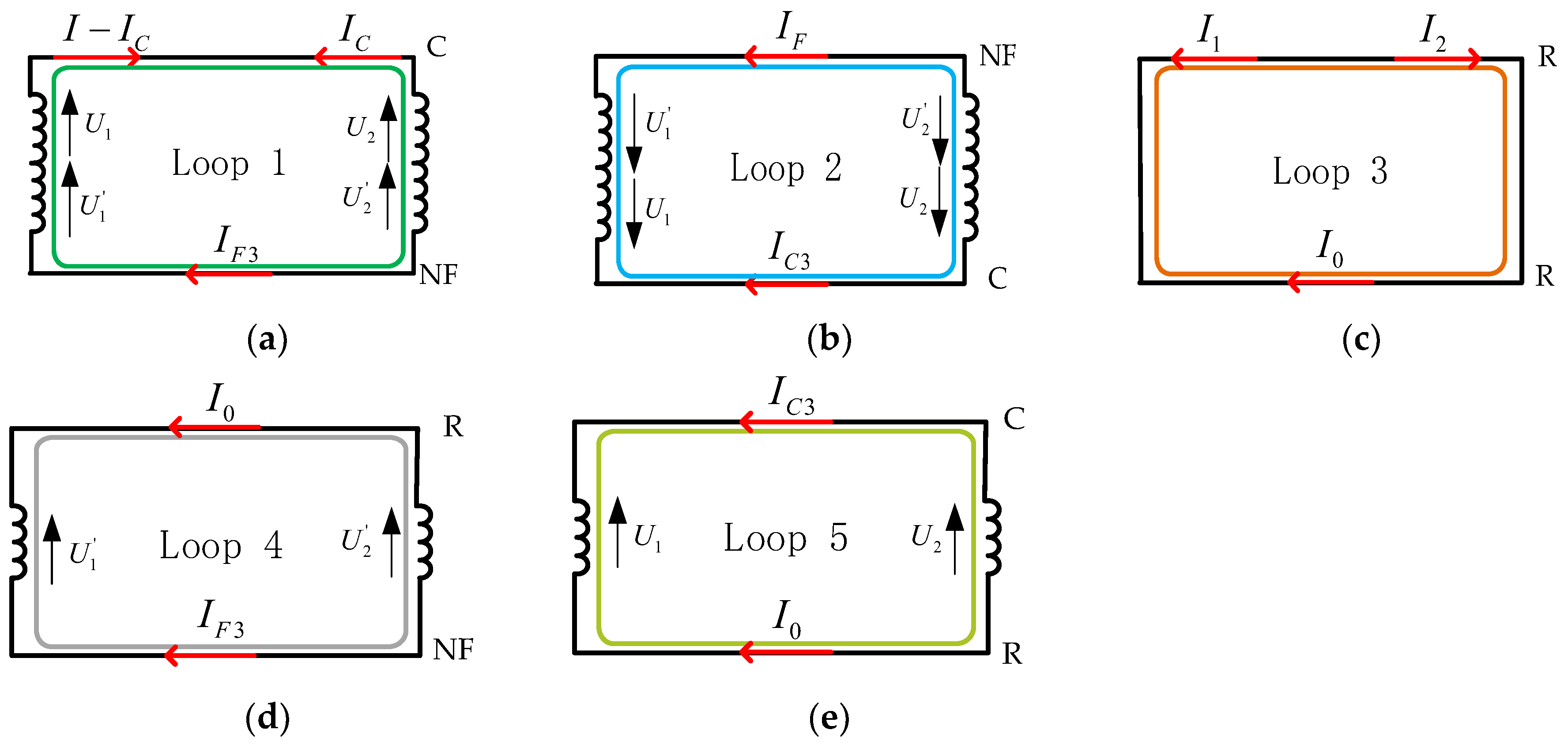
By analyzing the current loops in
Figure 4, the five loop current equations can be described:
The current distribution equation can be obtained from Equations (1)–(6) as follows,
Due to the symmetry between the subsections, when an EMU is running at another subsection, a similar current distribution can be obtained.
In an AT subsection, the terminal near the TS is called the head terminal,
, and the remote terminal is the end terminal
. In
Figure 5, the current in the head terminal of the catenary is given by
, and in the end terminal is given by
. Similarly, the currents in negative feeder are
and
. Similarly, the catenary voltages are
and
.
The fundamental wave of current at the present time,
, and the fundamental wave of current at a primitive period ago,
, are given; the increment current
can be computed as follows,
When one EMU is starting, the maximum increment current of the EMU occurs. As EMU start-up time is short, in the vast majority of circumstances, only one EMU is starting in all parallel AT TPSS. If the maximum increment current of the EMU is
at the AT subsection as
Figure 6 shows, with growth of distance,
, derived from Equation (7), the distribution of the maximum increment current at the EMU running subsection can be presented as Equations (9) and (10).
Similarly, the distribution of the maximum increment current at other subsections can be expressed as:
Under normal operation, the increment current of EMUs is not very large. When a short-circuit fault occurs in the TPSS, the short circuit current will increase rapidly. According to whether the increment current of the catenary is larger than that of EMU, the identification method for the high transition resistance short circuit fault can be obtained.
When the voltage root mean square (RMS) of the pantograph drops below the threshold, the voltage will not meet the normal work conditions of the converter in the EMU, so the EMU stops to get energy from the catenary but there is only short circuit current in the TPSS. The pantograph voltage below the threshold and the current distribution can serve to identify the low transition resistance short circuit fault. However, the pantograph voltage cannot be obtained in the TPSS. The catenary voltage and can be used to replace the pantograph voltage.
3. Principles of the Hybrid Fault Identification Method
After analyzing the current and voltage distribution in all parallel AT TPSS, a fault identification method is obtained which regards each AT subsection as a protection unit.
Operation current
and restraint current
can be described as follows [
26],
Operation increment current
and restraint increment current
can be expressed as follows [
27],
Similarly, operation current , restraint current , operation increment current , and restraint increment current in the negative feeder can also be computed.
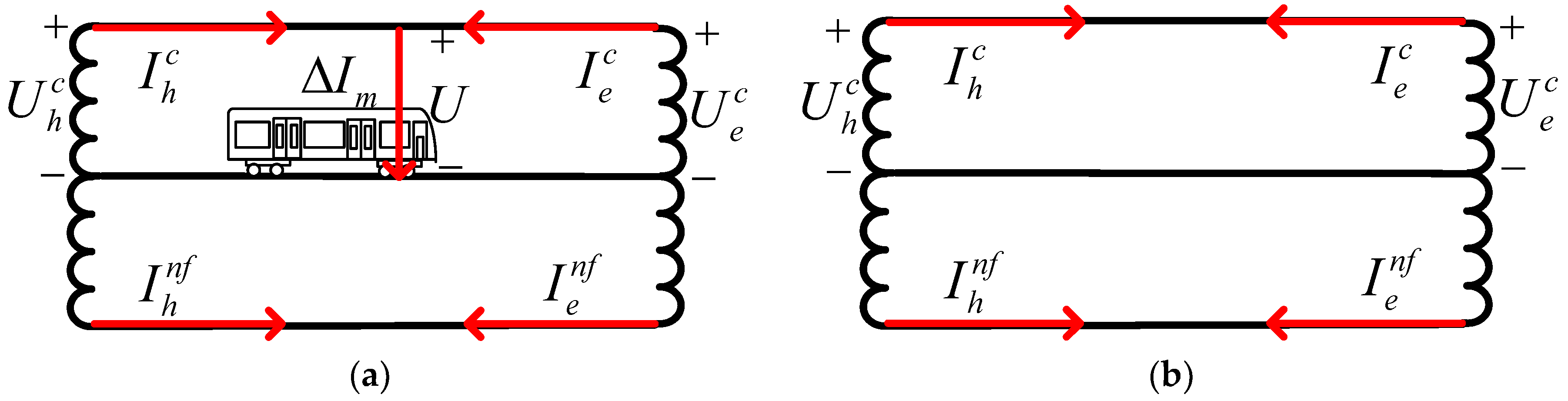
3.1. Identification Method of Fault with Low Transition Resistance
The preliminary identification of a fault with low transition resistance is given by the following equation,
where
is the threshold. After a preliminary identification in Equation (16), the confirmed identification equation of the short circuit wires is described as:
where
is the pick-up current and
is the reliability coefficient. As
Figure 7 illustrates, the C-G fault is identified when Equations (16) and (17) are satisfied, the NF-G fault is identified if Equations (16) and (18) are satisfied, and the C-NF fault is indicated if the condition of Equations (16)–(18) are set up.
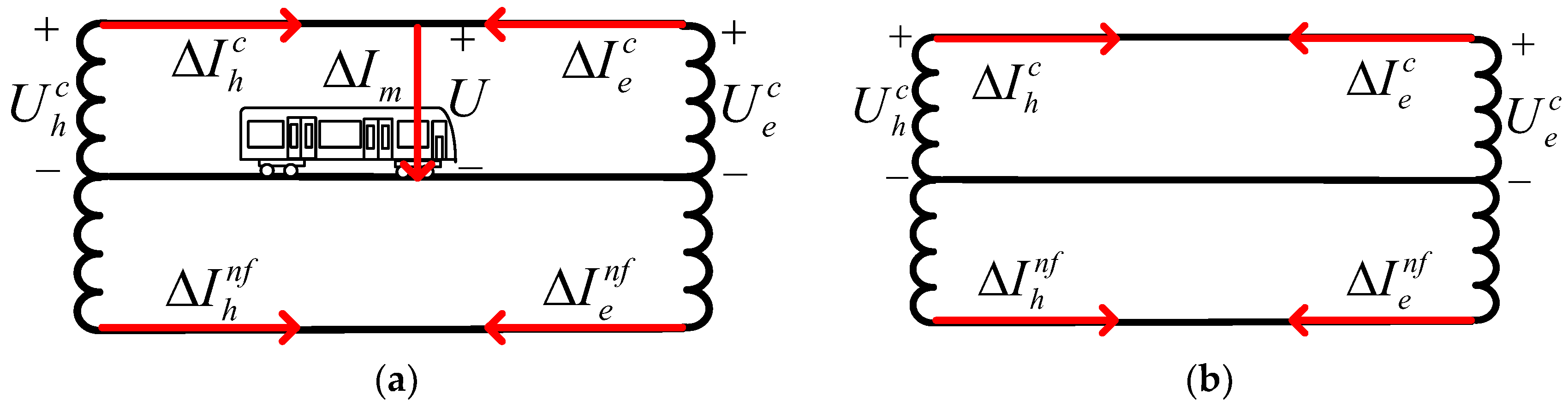
3.2. Identification Method of Fault with High Transition Resistance
3.2.1. Identification of C-G Fault
Derived from Equations (9) and (14), the preliminary identification which indicates if there may be a C-G fault is given by the following equation,
where
is the reliability coefficient. To avoid multiple EMUs starting at the same time in a few cases, the operation current in the catenary must be guaranteed to not fall during a certain period of time,
. The confirmed identification equation is expressed as,
where
is the operation current in the catenary at the moment when the fault occurs,
is the time of
, and
is the pick-up time. The current of EMU will drop after the short EMU start-up time, but the short circuit current will last until the fault is removed; Equation (20) is used to effectively avoid the current caused when multiple EMUs start-up. As
Figure 8a shows, the C-G fault is indicated.
3.2.2. Identification of NF-G and C-NF Fault
Derived from Equations (10) and (11), the preliminary identification, which indicates there may be a fault, is obtained by the following equation,
After a preliminary identification in Equation (21), the confirmed identification of the short circuit in the negative feeder can be shown as follows,
where
is the restraint coefficient. After Equation (22) is satisfied, the confirmed identification of the short circuit in the catenary is described as,
where
and
are pick-up increment currents. When Equations (21) and (22) are satisfied the NF-G fault is figured out, as
Figure 8b shows. In Equation (23), when the C-NF fault occurs without an EMU at the AT subsection the operation increment current in the catenary and negative feeder are almost equal. However, at the EMU running subsection, as the operation increment current is comprised of the EMU increment current and the fault increment current, the EMU current increases due to the voltage drop of the catenary caused by the fault, so the operation increment current of the catenary is larger than it in the negative feeder. Therefore, if the Equations (21)–(23) are satisfied, the C-NF fault, as
Figure 8c indicates, is confirmed.
3.3. Relationship between Two Kinds of Identification Methods
When the catenary voltage RMS is in the range of 29 kV to 17 kV, in China, EMUs can work normally. In cases of short circuit with high transition resistance, the voltage is still in this range. However, the short circuit current increases rapidly, so the increment current of short circuit is larger than that of the EMU. Therefore, Equations (19)–(23), based on increment current, can be used to distinguish the three fault types with high transition resistance at the AT subsection.
When the catenary voltage is below 17 kV, a short circuit with low transition resistance occurs and there is only short circuit current in the TPSS. Equations (16)–(18), based on low voltage and operation current, can be used to identify the fault types at the AT subsection.
In the identification method of high transition resistance fault, the increment current is widely used, but its discriminant window only exists at the moment when the fault occurred. In the identification method of low transition resistance fault, the low voltage and the operation current can continue to distinguish the fault until the fault removal. The two kinds of fault identification methods for low/high transition resistance constitute a complete hybrid fault identification method for all parallel AT TPSS.
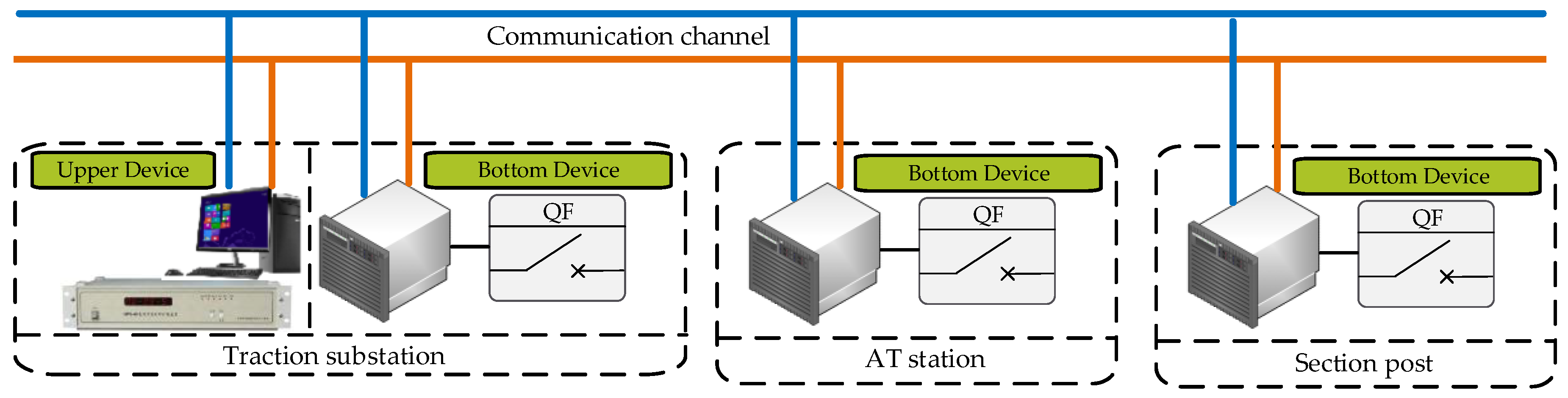
3.4. Equipment Composition and Flowchart of Protection System
The hybrid fault identification method is realized by means of a protection system mainly composed of the bottom devices, communication channel, and upper device, as shown in
Figure 9.
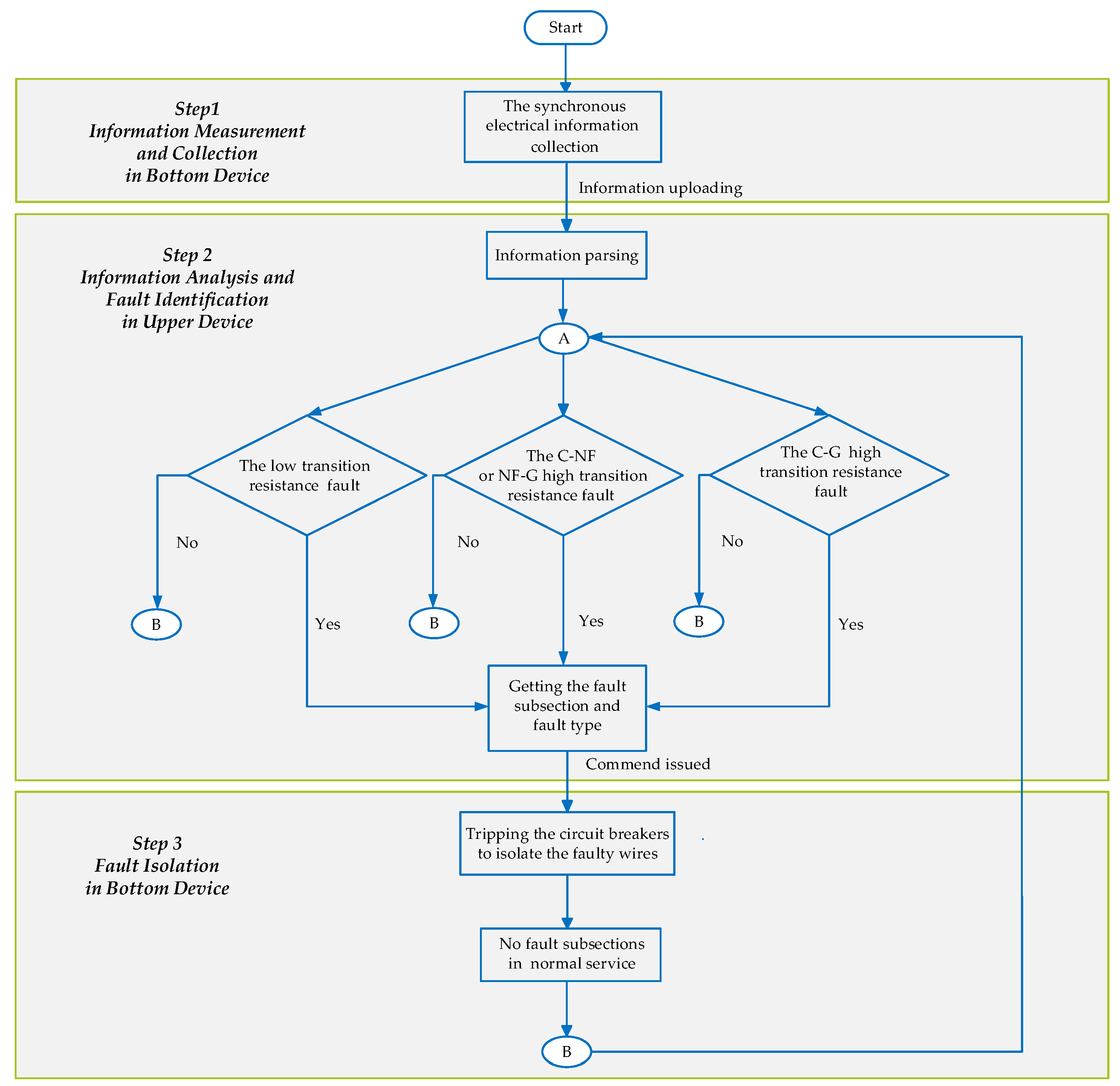
The bottom devices installed in the TS, ATS, and SP are responsible for synchronously collecting the electrical information, uploading real-time information, receiving commands from the upper device, and controlling the circuit breakers. The communication between the bottom devices and the upper device draws support from the fiber channel. The upper device stores and analyzes the electrical information collected from the bottom devices. If a fault occurs, the upper device finds out the fault subsection and fault type by the hybrid fault identification method, the command is issued to the bottom devices to control the circuit breakers to isolate the wires where the fault occurs, so the protection system makes sure that no fault AT subsections work normally. The flowchart of the protection system is presented in
Figure 10.
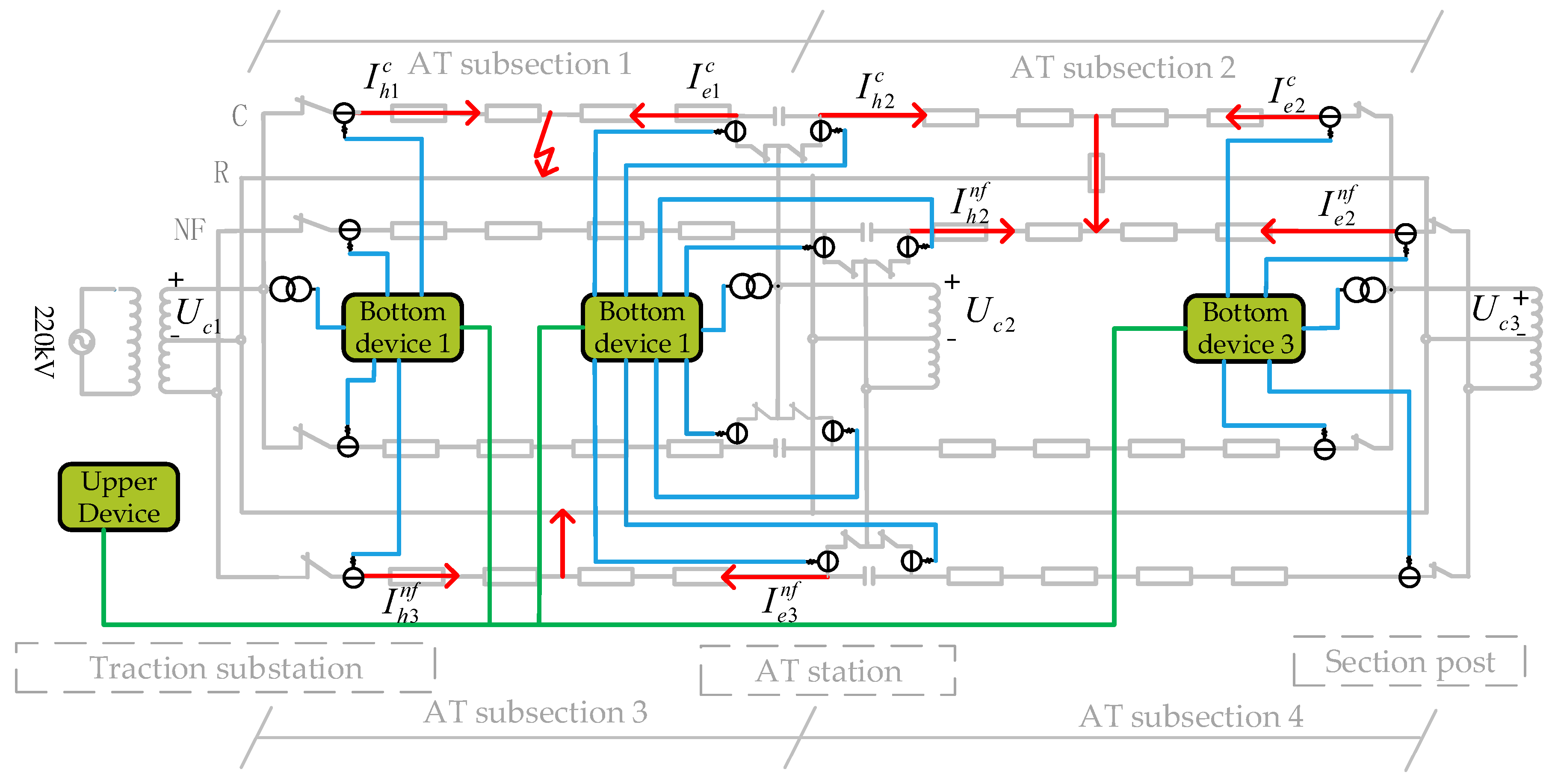
As
Figure 9 and
Figure 11 show, the bottom devices synchronously collect information include the voltage from TS, ATS and SP (
,
, and
), the current of each wire (
,
,
and
) at the AT subsection
, as well as the state of each circuit breaker in the all parallel TPSS, and upload them to the upper device. When the C-G fault occurs, the upper device can identify the fault details, and sends out a tripping command to the bottom devices in TS and ATS. The bottom devices trip the circuit breakers 1QF and 3QF. Finally, other AT subsections continue in normal operation. Similarly, when the C-NF fault occurs at AT subsection 2, the circuit breakers 5QF, 6QF, 7QF, and 8QF are tripped. If the NF-G fault occurs at AT subsection 3, the circuit breakers 10QF and 12QF are tripped.
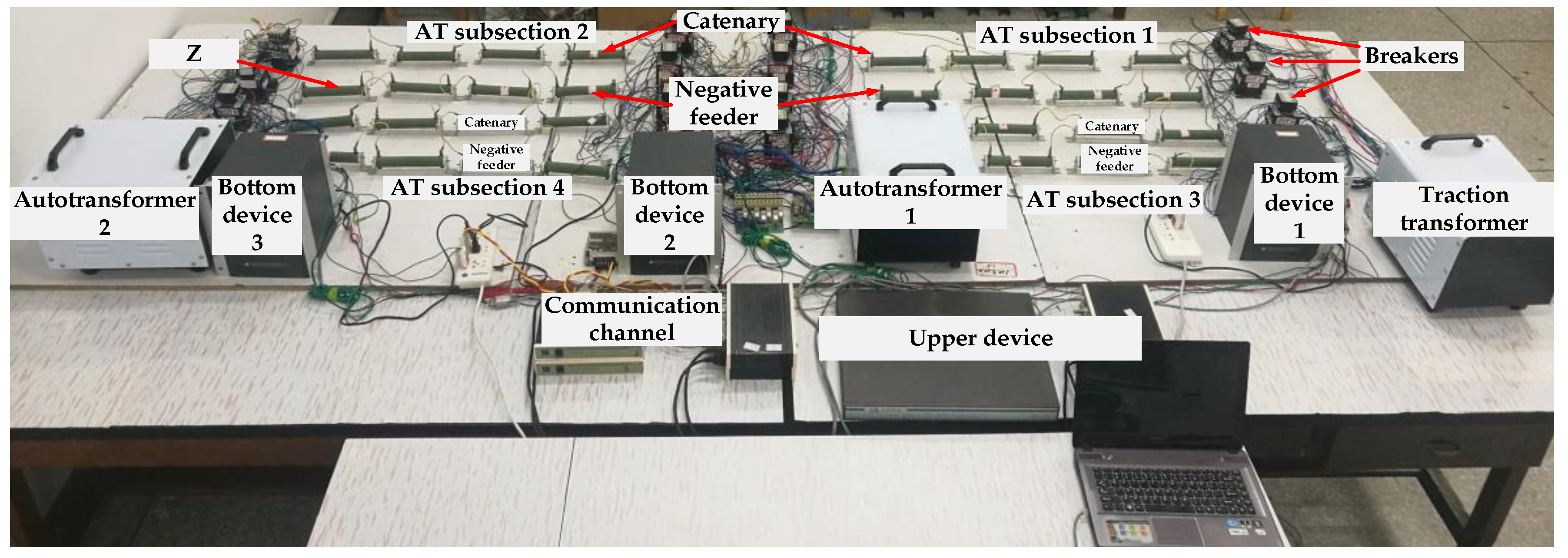
4. Experimental Simulations
In order to verify the validity of the fundamentals of the proposed hybrid fault identification method, a simulation model was constructed using MATLAB
® software. The simulation circuit followed the configuration as indicated in
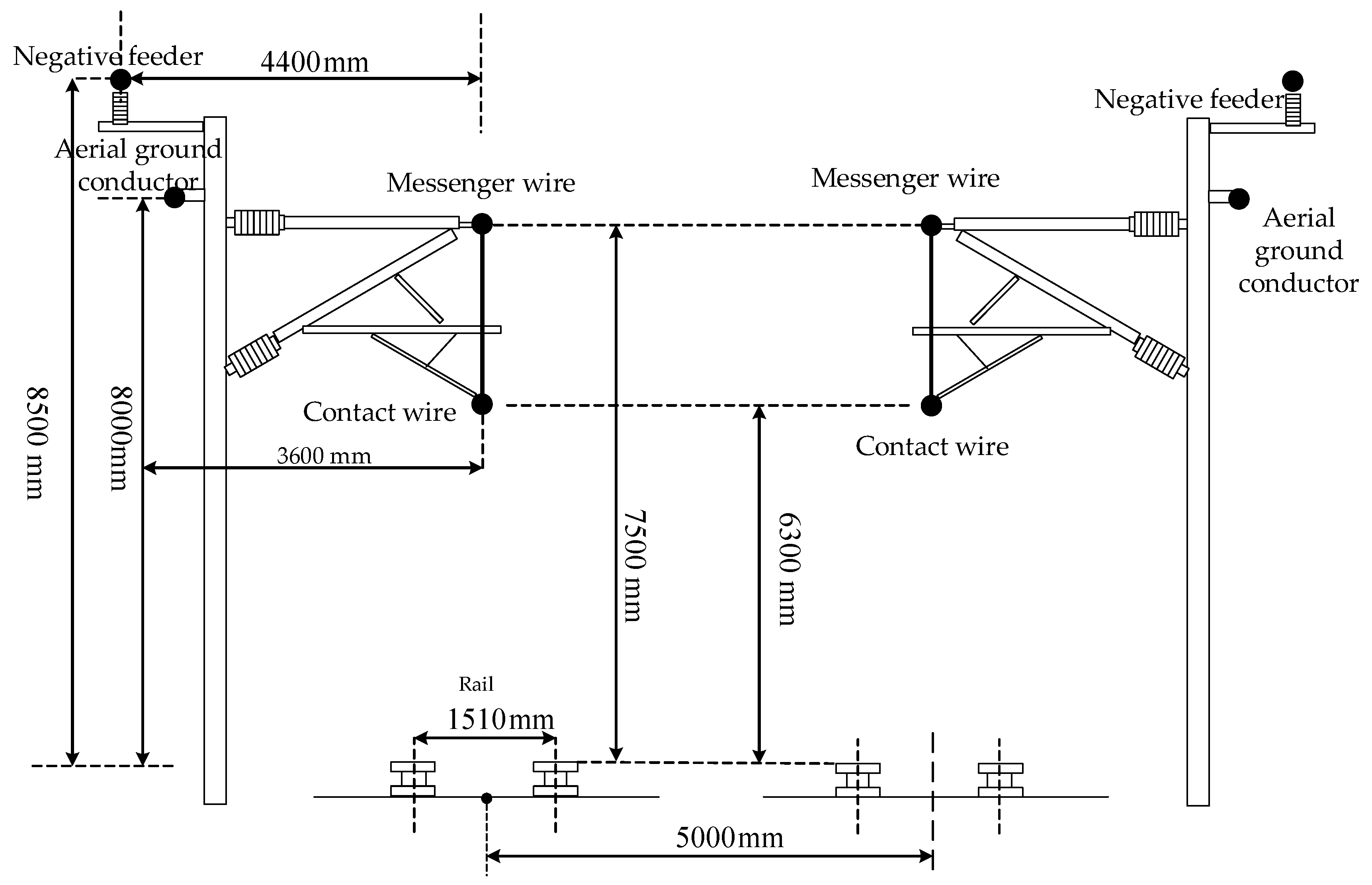
Figure 11. The circuit was supplied by the source of 220 kV and the minimum short circuit capacity was 6704 MVA. The V/x transformer was applied as the traction transformer, which transformed 220 kV to 55 kV, and its rated capacity was 40 MVA. The rated capacity of the AT transformers was 32 MVA. The circuit had four AT subsections and the length of each subsection was 12 km. The impedances parameters of the simulation model were computed from the actual railway of Datong–Xian in China, as shown in
Figure 12. The impedances are shown in
Table 2.
The fiber channel was ignored in the simulation model, and the bottom devices and the upper device were all realized. The parameters in the upper device are presented in
Table 3.
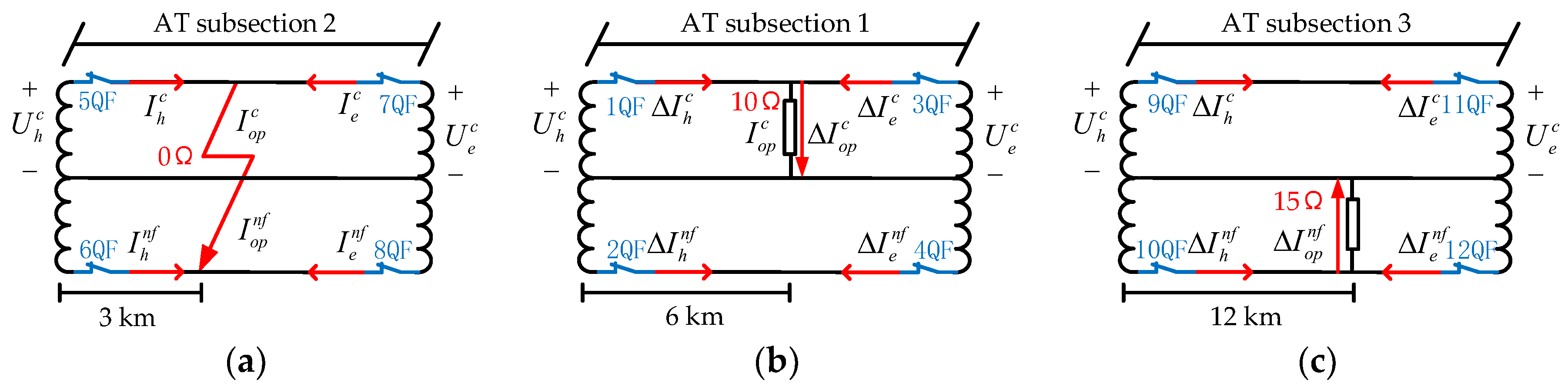
Numerous cases of different transition resistance at different short circuit locations were simulated. In this section, the three typical short circuit faults in three different locations were presented, the C-NF fault at AT subsection 2 in 3 km with 0 Ω transition resistance; the C-G fault at AT subsection 1 in 6 km with 10 Ω; and the NF-G fault at AT subsection 3 in 12 km with 15 Ω, as shown in
Figure 13.
In the simulation, the command “1” makes the circuit breakers closed and the command “0” makes the breakers open. When the state signals of breakers are “1”, the breakers are closed. The signals are “0” and the circuit breakers are open. In the cases, the tripping time of breakers are delayed in order to better display electrical characteristics.
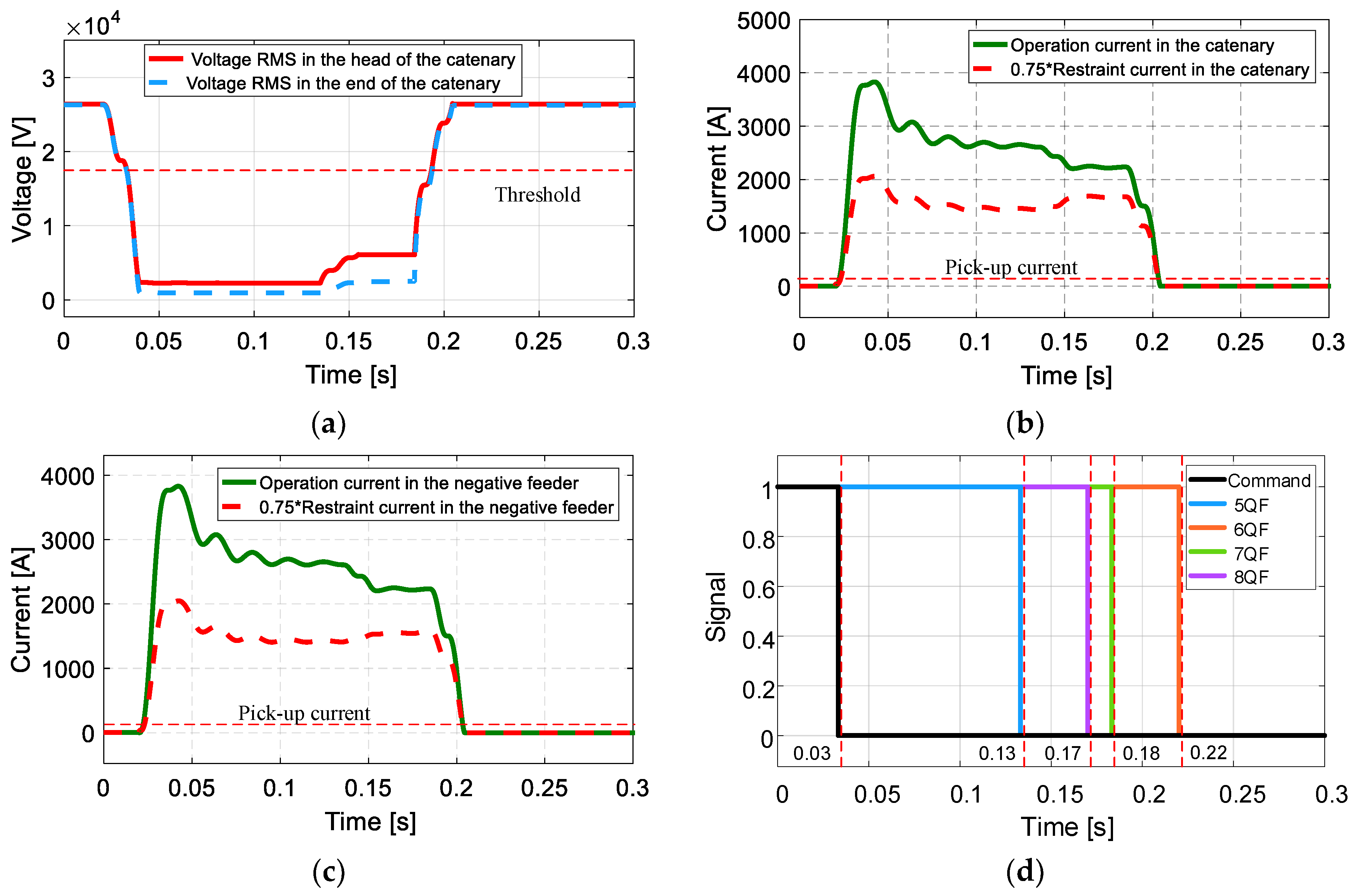
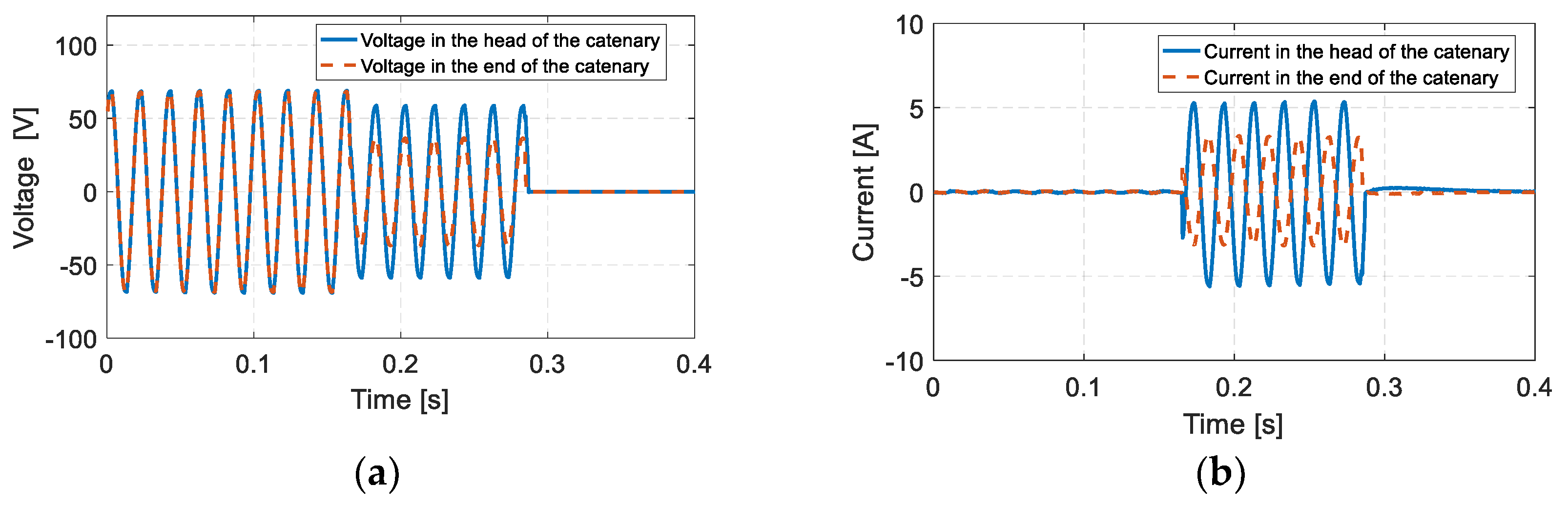
4.1. Case 1: C-NF Fault with 0 Ω Transition Resistance at AT Subsection 2 in 3 km
In the case that a short circuit occurred in
Figure 13a at 0.02 s the waveform of the voltage RMS, operation current, restraint current, command, and state of the circuit breakers are presented in
Figure 14. The X axes used in
Figure 14 are scaled from 0 to 0.2 s; the electrical process of the fault beginning along the fault removal can be observed.
In
Figure 14a, when the catenary voltage RMS dropped below the threshold, the upper device preliminarily determined that there was a short circuit with low transition resistance. Moreover, the operation current was greater than the pick-up current and the restraint current in the catenary as well as in the negative feeder as presented in
Figure 14b,c. Equations (16)–(18) were satisfied. The upper device determined that the C-NF short circuit occurred at the AT subsection 2 and sent the command to the bottom devices in the ATS and SP at 0.3 s, the circuit breakers was tripped at the different times as
Figure 14d shows. Finally, the voltage RMS returned to a normal level, the operation current disappeared, and other subsections kept in service.
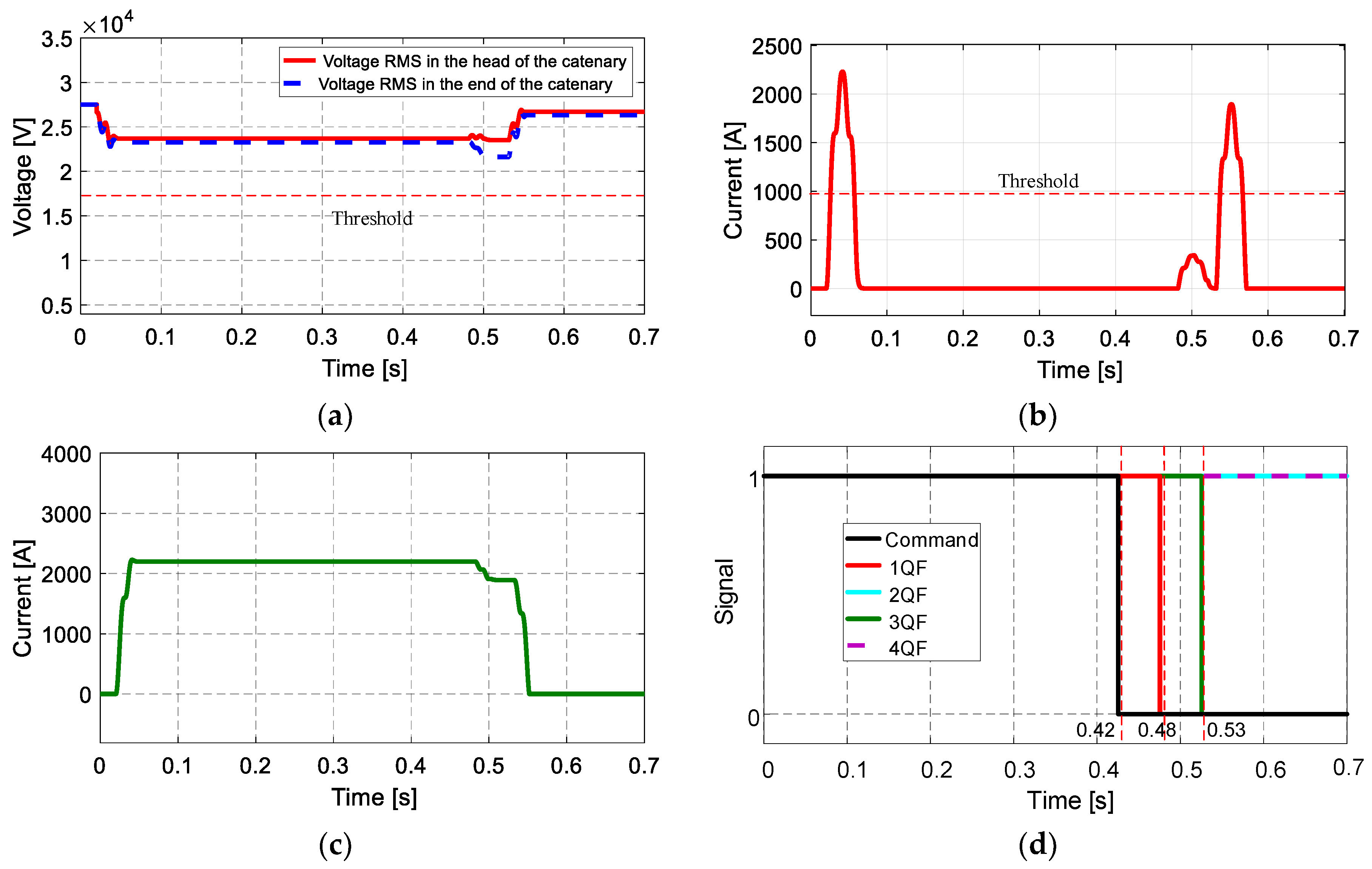
4.2. Case 2: C-G Fualt with 10 Ω Transition Resistance at the AT Subsection 1 in 6 km
A short circuit occurred in
Figure 13b at 0.02 s. After the fault occurred, the catenary voltage RMS was still greater than the threshold in
Figure 15a. However, the first current crest caused by the short circuit in
Figure 15b exceeded the threshold. Furthermore, the operation current continued to not decrease during 0.4 s as
Figure 15c shows. Both Equations (19) and (20) were satisfied, the upper device determined that the C-G fault occurred and sent the command to the bottom devices in TS and ATS at 0.42 s, as shown in
Figure 15d; the circuit breakers 1QF and 3QF were tripped at different times to disconnect the catenary. Voltage returns to a normal level, the operation increment current displays current crests due to the breakers tripped, and the operation current disappears. The other subsections continued in service.
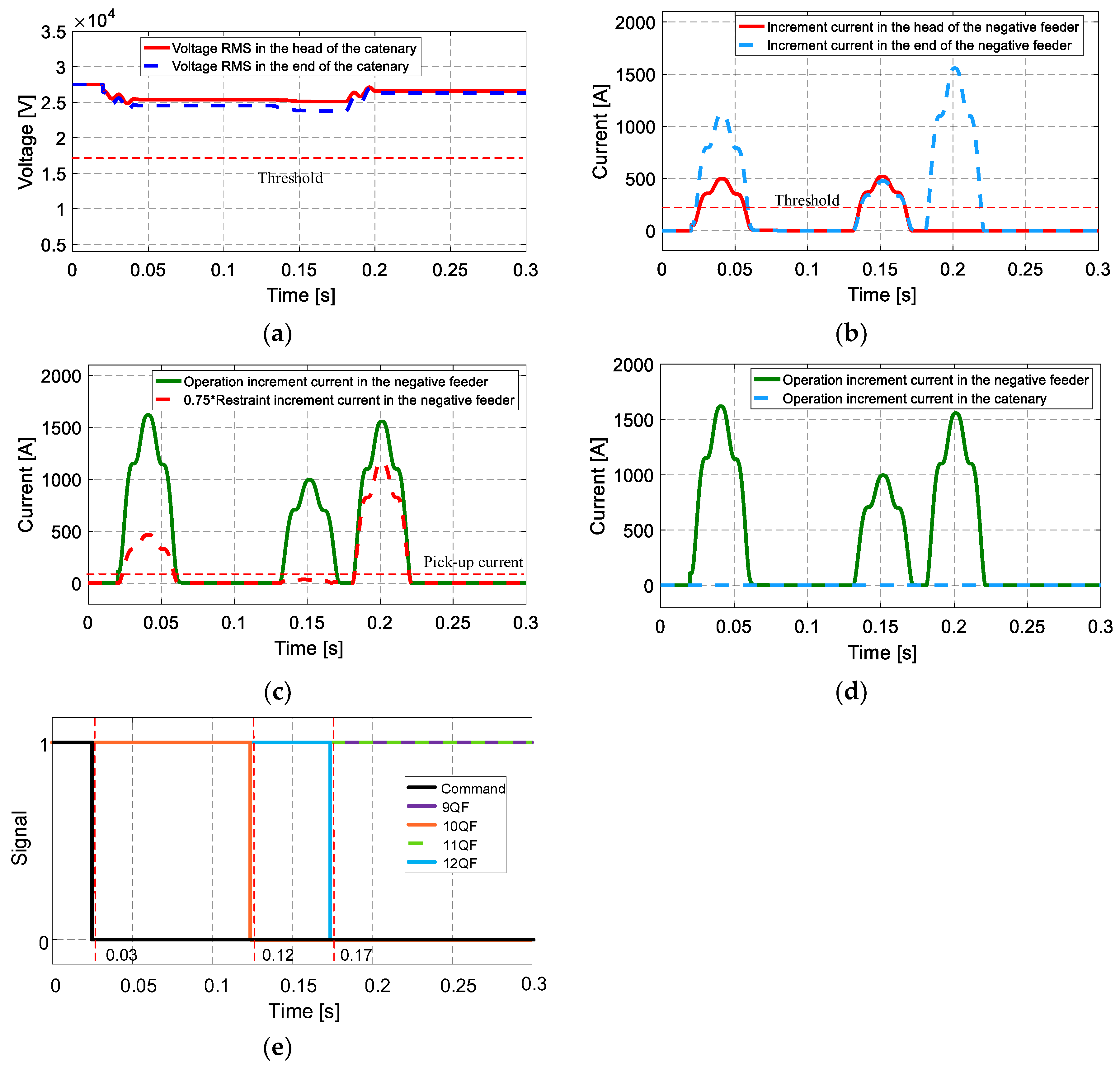
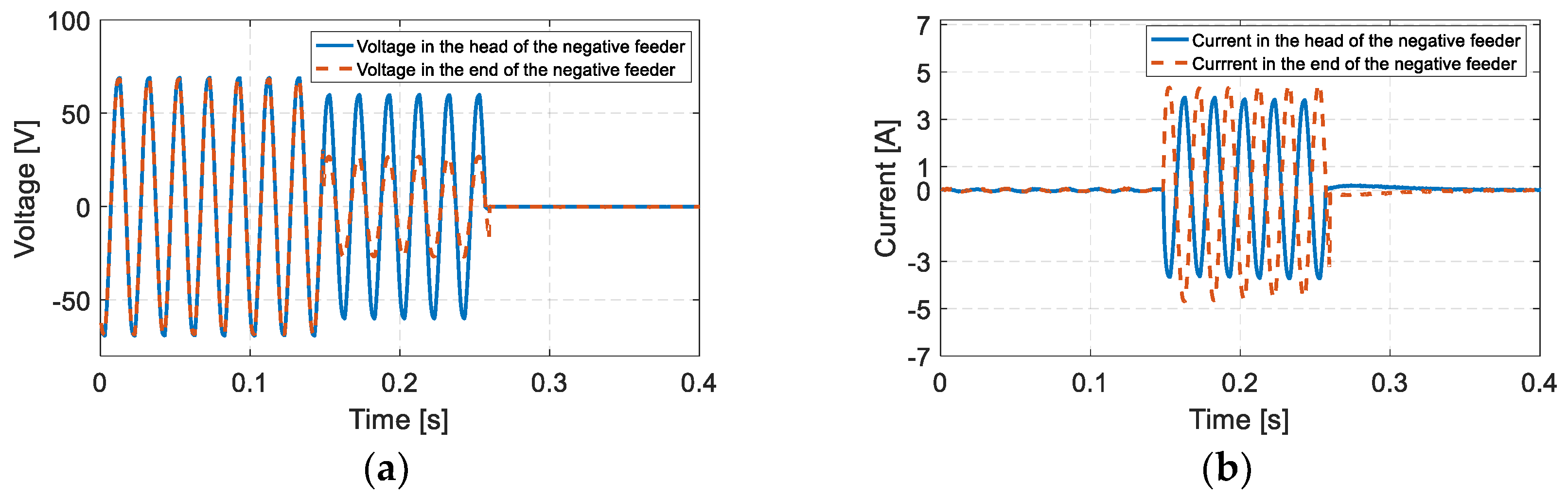
4.3. Case 3: NF-G Fualt with 15 Ω Transition Resistance at the AT Subsection 3 in 12 km
A short circuit occurred in
Figure 13c at 0.02 s. After the fault occurred, the catenary voltage RMS dropped, but still was not below the threshold as
Figure 16a presents. Whereas the increment current RMS in both terminals of the negative feeder exceeded the threshold as
Figure 16b shows, which satisfied Equation (21). Although the operation and restraint increment current in the negative feeder could satisfy Equation (22), but the operation increment current in the catenary and the negative feeder did not satisfy Equation (23), as shown in
Figure 16c,d. Finally, the result of NF-G fault was obtained in the upper device, the command was sent at 0.03 s in
Figure 16e, the circuit breakers 10QF and 12QF were tripped to disconnect the negative feeder; the catenary at the subsection 3 and other subsections still kept in service.
Through numerous simulations of the different short circuit cases, a new identification method could achieve all the expected goals. It was verified that the method could identify faults correctly and effectively and realize fault removal to the maximum level to keep power supply in all parallel AT TPSS. Therefore, the novel hybrid fault identification method was completely successful.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}