A Multidisciplinary Approach for the Development of Smart Distribution Networks

 ,
,  ,
,  ,
, 

Abstract
1. Introduction
1.1. Context and Motivation
1.2. Contribution and Organization of This Paper
2. Key Interactions in Design, Development and Operation of Smart Distribution Networks
2.1. The Transition from Passive Towards Smart Distribution Networks
- ▪
- Novel DN structures, such as MG, VPP and EH, as well as new frameworks for energy management and electricity market scenarios;
- ▪
- Advanced, accurate and reliable monitoring systems, able to observe and estimate DN status at greater resolution in space and time, in order to support DN control and management;
- ▪
- Appropriate management and control systems, able to optimize DN bidirectional power flows, energy saving and economic benefits according to the SG paradigm;
- ▪
- Communication and data processing systems, which have to guarantee seamless interactions among all DN components and proper level of cyber-security.
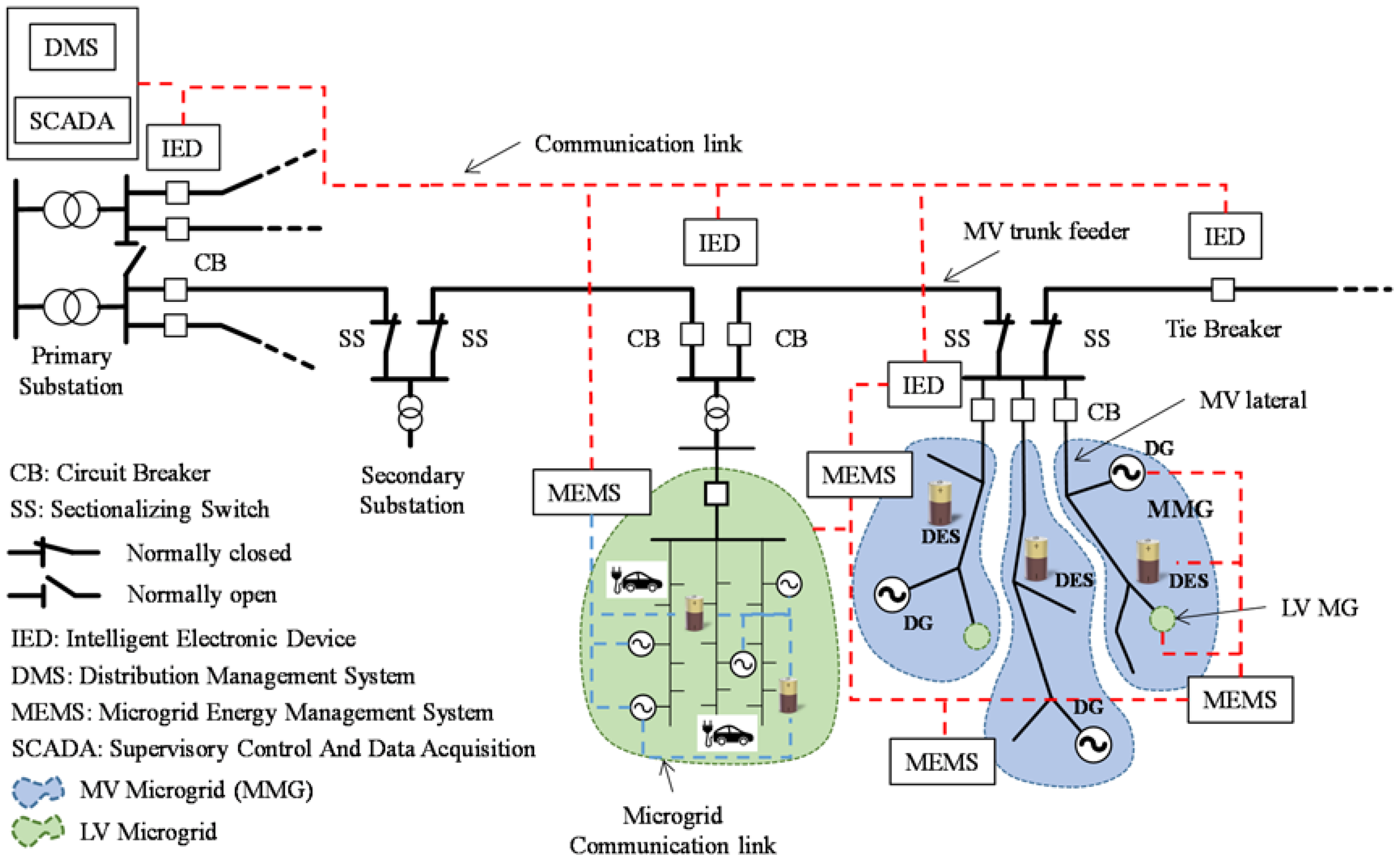
2.2. Main Schemes and Components of Smart Distribution Networks
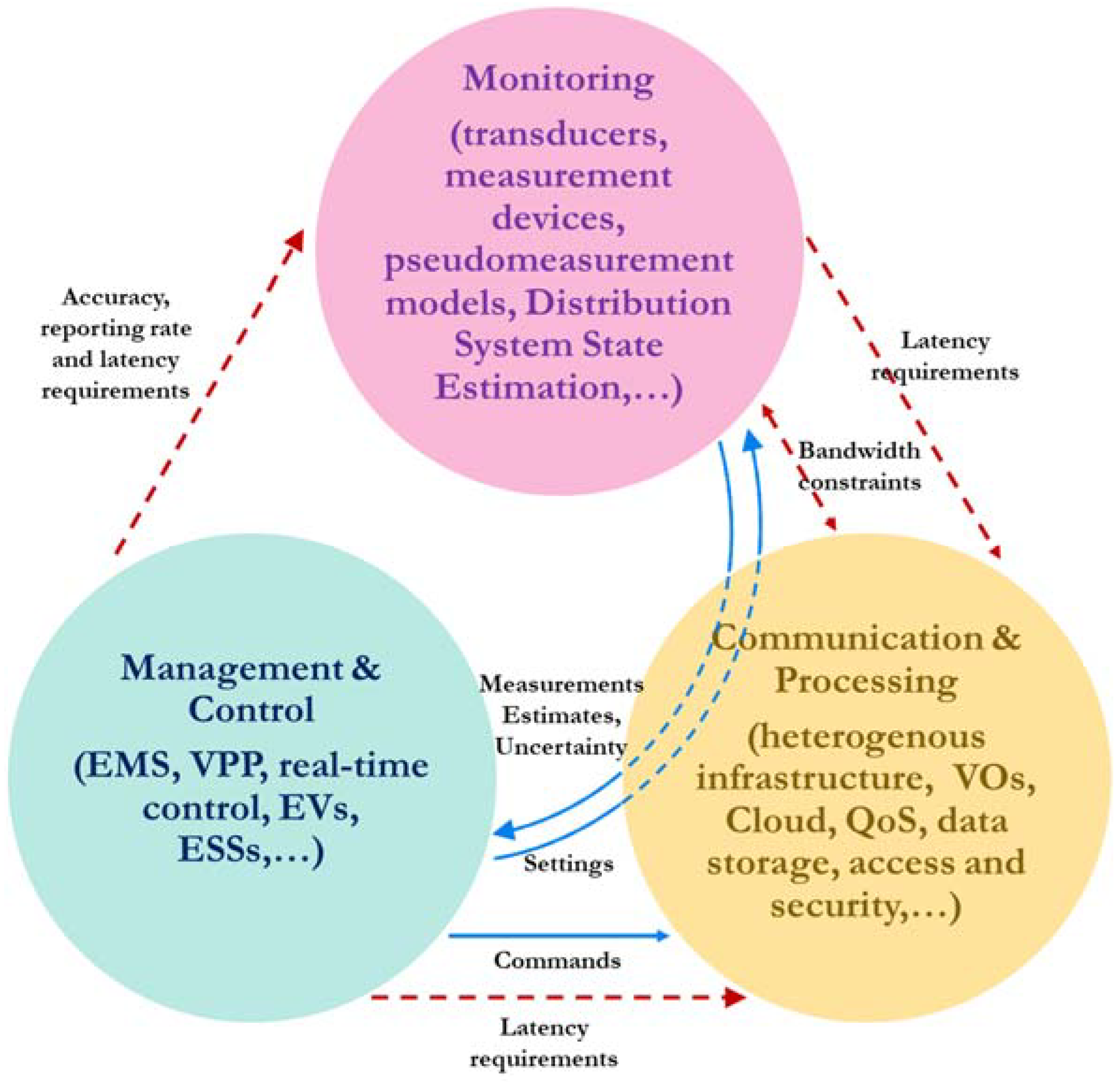
2.3. Multidisciplinariety in Smart Distribution Network Development
3. Monitoring of Smart Distribution Networks
3.1. New Generation Meters
3.2. Synchronized Measurement Systems
3.3. Distribution System State Estimation
3.4. Forecasting-Aided Monitoring Systems
4. Management and Control of Distributed Energy Resources in Smart Distribution Networks
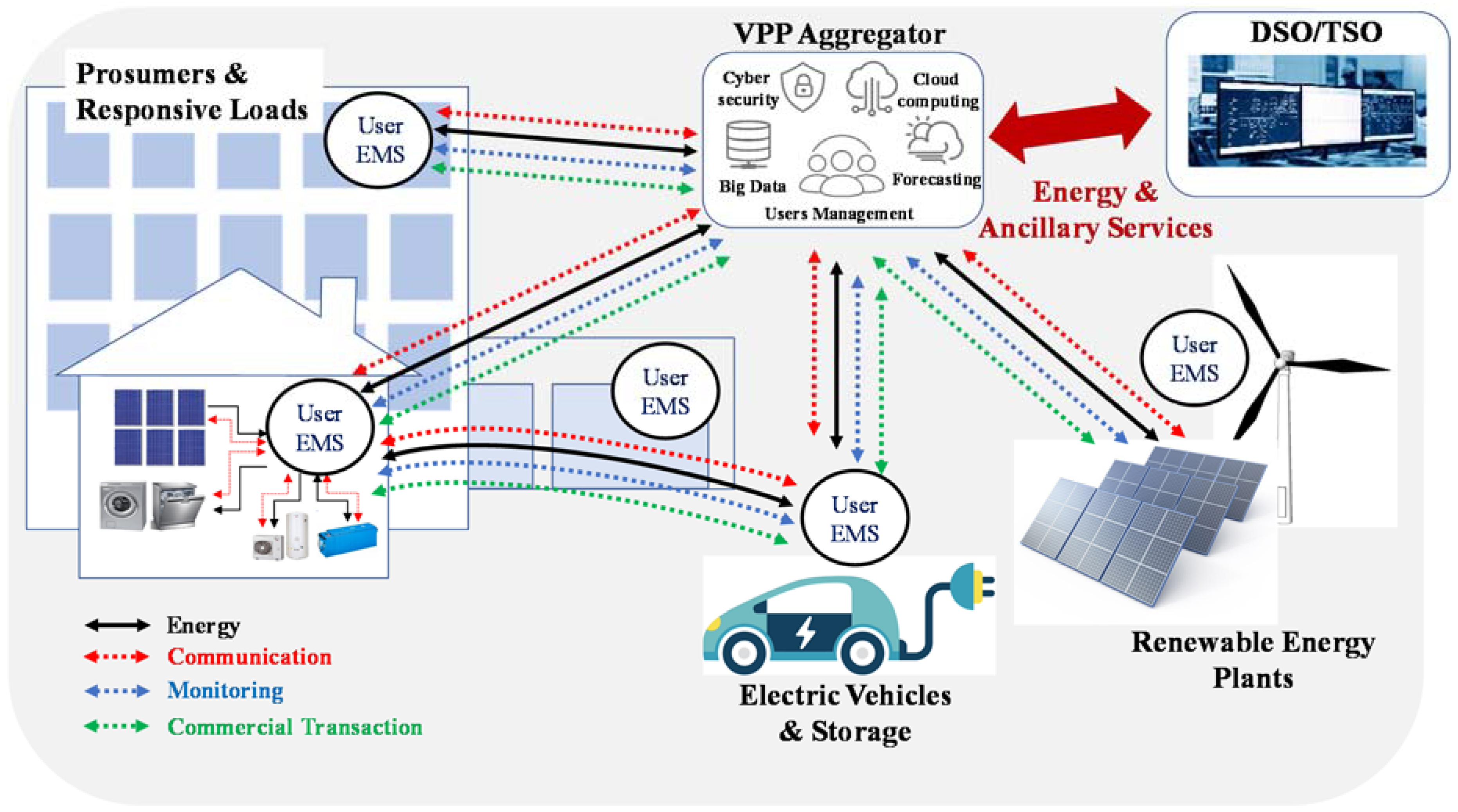
4.1. Energy Management Systems for Distributed Energy Resources
4.2. Energy Storage Systems for Smart Distribution Networks
5. Communication and Data Processing in Smart Distribution Networks
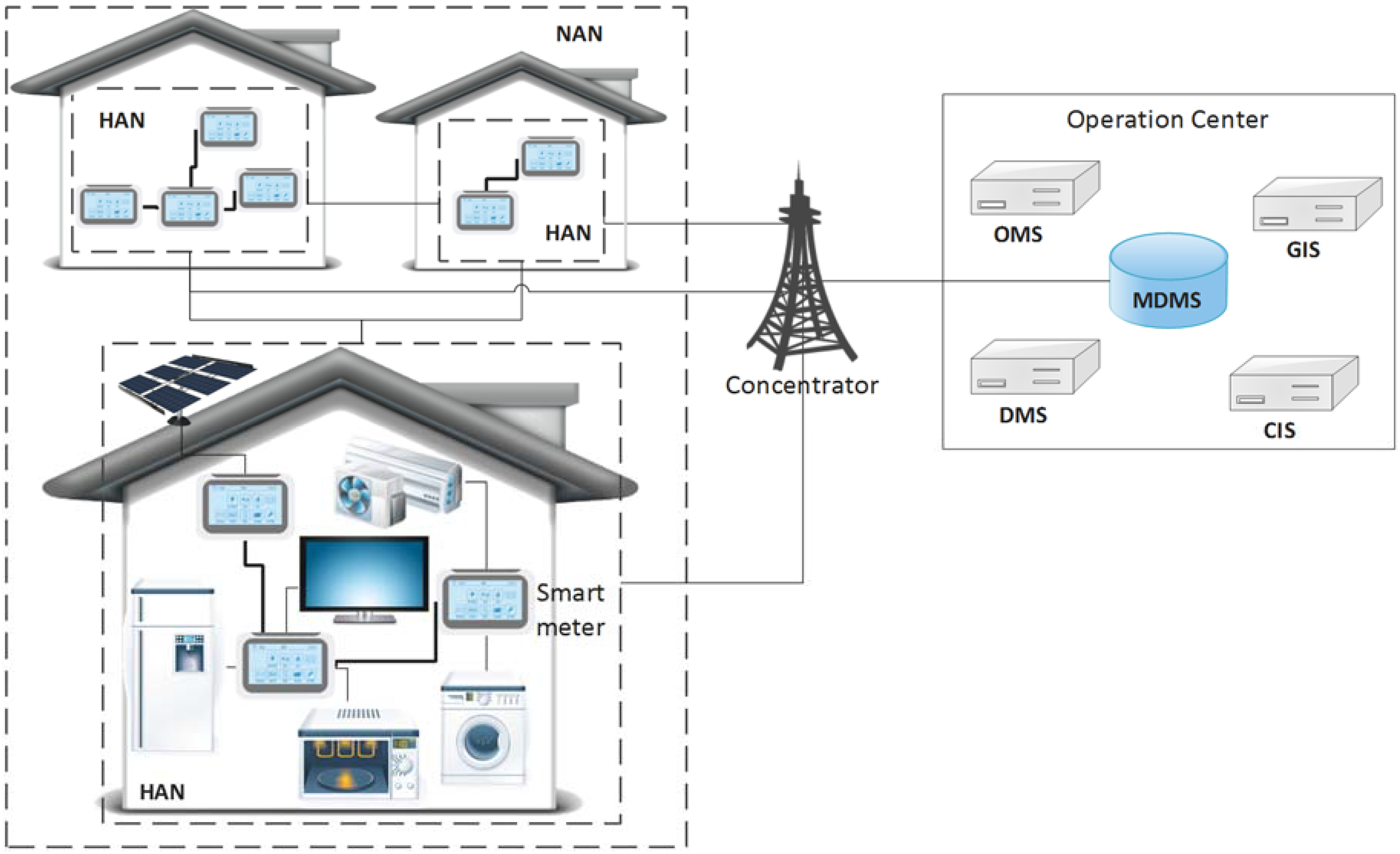
5.1. Communication Technologies for Smart Distribution Networks
- ▪
- Automated meter reading (AMR)
- ▪
- Automatic meter management (AMM)
- ▪
- Advanced metering infrastructure (AMI)
- ▪
- The outage management system, which detects, manages and registers power outages;
- ▪
- The geographic information system, which provides geographic information about the location of the elements of the SDN;
- ▪
- The consumer information system, which manages information about the consumer, such as consumption rates and billing-related data. It enables the development of new products and services, based on the consumer profile;
- ▪
- The data management system, which provides control, management and forecasting functionalities.
5.1.1. Wired Communications in Smart Distribution Networks
5.1.2. Wireless Communications in Smart Distribution Networks
5.2. Data Security for the Future of Smart Distribution Networks: Biometric Technologies
6. Concluding Remarks and Further Research Direction
- Various scenarios for SDN development are possible, the most promising ones have been emphasized in the paper (MG, VPP and EH); among these EH seems the most suitable because it requires the deep integration of different hybrid energy vectors (electrical, chemical, thermal, hydrogen, etc.). In this regard further investigation will be need in order to assess its implementation within SDN;
- The SDN must rely on an accurate and efficient monitoring system and on a reliable communication system. Furthermore, it needs to dynamically reconfigure and adapt to changes that can occur in the system and/or the environment, as well as to have self-healing capabilities;
- The SDN control must be fast, reliable and robust, particularly considering the large number of components that might introduce variability (e.g., consumers’ actions and uncertain RES energy production). Appropriate communication schemes need to be developed to ensure that these requirements are fulfilled;
- The MS, which gives the information necessary for the coordination and management of DERs, should provide a meaningful uncertainty description associated with the measurement data, thus allowing a risk-aware decision making;
- The communication system is fundamental to implement the applications, since it allows collecting data and propagating commands while abstracting from hardware- or protocol-depending issues;
- The ICT infrastructures cannot be defined without the knowledge of the requirements of DMS and independently from their specific application targets (power delivery network, communication, monitoring, data processing, etc.). The infrastructure oversizing approach cannot be applied for economic reasons, and thus new design approaches should be sought;
- With the spread of pervasive and distributed communications, more and more objects will be able to provide data that can be used to enhance users’ experience and to improve the system reliability and resilience to failures;
- The massive growth of embedded technologies, machine-to-machine communications, ubiquitous communications and cloud computing technologies will provide more complex control schemes, such as demand response and load management;
- The relationships among the monitoring, communication, elaboration and application layers are so strong that the impact of incorrect sub-system definitions can be dramatic on the overall SDN performance; in this regard, the paper has shown that larger efforts should be made to integrate the concurrent systems even from the early stages of the SDN design as a whole.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Clean Energy for All Europeans-Energy European Commission. Available online: https://ec.europa.eu/energy/en/topics/energy-strategy-and-energy-union/clean-energy-all-europeans (accessed on 1 August 2018).
- Hancher, L.; Winters, M. The EU Winter Package: Briefing Paper. 2017. Available online: https://core.ac.uk/download/pdf/79665899.pdf (accessed on 19 September 2018).
- Mohammadi, M.; Noorollahi, Y.; Mohammadi-ivatloo, B.; Hosseinzadeh, M.; Yousefi, H.; Khorasani, S.T. Optimal management of energy hubs and smart energy HUBS—A review. Renew. Sustain. Energy Rev. 2018, 89, 33–50. [Google Scholar] [CrossRef]
- Renewables 2017 Global Status Report (REN21). Available online: http://www.ren21.net/status-of-renewables/global-status-reportrenewables-2017-global-status-report/ (accessed on 25 July 2018).
- Zia, M.F.; Elbouchikhi, E.; Benbouzid, M. Microgrids energy management systems: A critical review on methods, solutions, and prospects. Appl. Energy 2018, 222, 1033–1055. [Google Scholar] [CrossRef]
- Parhizi, S.; Lotfi, H.; Khodaei, A.; Bahramirad, S. State of the Art in Research on Microgrids: A Review. IEEE Access 2015, 3, 890–925. [Google Scholar] [CrossRef]
- Bacha, S.; Picault, D.; Burger, B.; Etxeberria-Otadui, I.; Martins, J. Photovoltaics in Microgrids: An Overview of Grid Integration and Energy Management Aspects. IEEE Ind. Electron. Mag. 2015, 9, 33–46. [Google Scholar] [CrossRef]
- Microgrids: Architectures and Control. Available online: https://www.wiley.com/en-it/Microgrids%3A+Architectures+and+Control-p-9781118720684 (accessed on 25 July 2018).
- Fan, J.; Borlase, S. The evolution of distribution. IEEE Power Energy Mag. 2009, 7, 63–68. [Google Scholar] [CrossRef]
- Heydt, G.T. The Next Generation of Power Distribution Systems. IEEE Trans. Smart Grid 2010, 1, 225–235. [Google Scholar] [CrossRef]
- Fazio, A.R.D.; Erseghe, T.; Ghiani, E.; Murroni, M.; Siano, P.; Silvestro, F. Integration of renewable energy sources, energy storage systems, and electrical vehicles with smart power distribution networks. J. Ambient Intell. Humaniz. Comput. 2013, 4, 663–671. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, B.; Wang, J.; Chen, C. Networked Microgrids for Self-Healing Power Systems. IEEE Trans. Smart Grid 2016, 7, 310–319. [Google Scholar] [CrossRef]
- Celli, G.; Ghiani, E.; Mocci, S.; Pilo, F.; Soma, G.G.; Vertuccio, C. Probabilistic Planning of Multi-Microgrids with Optimal Hybrid Multi-Generation Sets. In Proceedings of the 46th International Conference on Large High Voltage Electric Systems (CIGRE Session 46), Paris, France, 21–26 August 2016. [Google Scholar]
- Li, Z.; Shahidehpour, M.; Aminifar, F.; Alabdulwahab, A.; Al-Turki, Y. Networked Microgrids for Enhancing the Power System Resilience. Proc. IEEE 2017, 105, 1289–1310. [Google Scholar] [CrossRef]
- Ma, T.; Wu, J.; Hao, L.; Lee, W.-J.; Yan, H.; Li, D. The optimal structure planning and energy management strategies of smart multi energy systems. Energy 2018, 160, 122–141. [Google Scholar] [CrossRef]
- Mengelkamp, E.; Notheisen, B.; Beer, C.; Dauer, D.; Weinhardt, C. A blockchain-based smart grid: Towards sustainable local energy markets. Comput. Sci.-Res. Dev. 2018, 33, 207–214. [Google Scholar] [CrossRef]
- Regulatory Recommendations for the Deployment of Flexibility. 2015. Available online: https://www.interregeurope.eu/fileadmin/user_upload/tx_tevprojects/library/EG3%20Final%20-%20January%202015.pdf (accessed on 19 September 2018).
- Geidl, M.; Koeppel, G.; Favre-Perrod, P.; Klockl, B.; Andersson, G.; Frohlich, K. Energy hubs for the future. IEEE Power Energy Mag. 2007, 5, 24–30. [Google Scholar] [CrossRef]
- Mancarella, P. MES (multi-energy systems): An overview of concepts and evaluation models. Energy 2014, 65, 1–17. [Google Scholar] [CrossRef]
- Directive 2009/72/EC of the European Parliament and of the Council of 13 July 2009 Concerning Common Rules for the Internal Market in Electricity and Repealing Directive 2003/54/EC. Available online: https://eur-lex.europa.eu/legal-content/EN/ALL/?uri=celex%3A32009L0072 (accessed on 19 September 2018).
- Smart Metering Deployment in the European Union | JRC Smart Electricity Systems and Interoperability. Available online: http://ses.jrc.ec.europa.eu/smart-metering-deployment-european-union (accessed on 25 July 2018).
- Cataliotti, A.; Cosentino, V.; Nuccio, S. Static Meters for the Reactive Energy in the Presence of Harmonics: An Experimental Metrological Characterization. IEEE Trans. Instrum. Meas. 2009, 58, 2574–2579. [Google Scholar] [CrossRef]
- Cataliotti, A.; Cosentino, V.; Nuccio, S. The Measurement of Reactive Energy in Polluted Distribution Power Systems: An Analysis of the Performance of Commercial Static Meters. IEEE Trans. Power Deliv. 2008, 23, 1296–1301. [Google Scholar] [CrossRef]
- Ferrero, A.; Faifer, M.; Salicone, S. On Testing the Electronic Revenue Energy Meters. IEEE Trans. Instrum. Meas. 2009, 58, 3042–3049. [Google Scholar] [CrossRef]
- Cataliotti, A.; Cosentino, V.; Lipari, A.; Nuccio, S. Metrological Characterization and Operating Principle Identification of Static Meters for Reactive Energy: An Experimental Approach Under Nonsinusoidal Test Conditions. IEEE Trans. Instrum. Meas. 2009, 58, 1427–1435. [Google Scholar] [CrossRef]
- Adamo, F.; Attivissimo, F.; Cavone, G.; Nisio, A.D.; Spadavecchia, M. Channel Characterization of an Open Source Energy Meter. IEEE Trans. Instrum. Meas. 2014, 63, 1106–1115. [Google Scholar] [CrossRef]
- SmartPi-Leistungsmessmodul für den Raspberry Pi-Energiemanagement, Eigenverbrauch, Hausautomation und Smart Home. Available online: http://www.emanager.eu/en/products/smartpi (accessed on 25 July 2018).
- Directive 2014/32/EU of the European Parliament and of the Council of 26 February 2014 on the Harmonisation of the Laws of the Member States Relating to the Making Available on the Market of Measuring Instruments (recast) Text with EEA Relevance. 2014. Available online: http://data.europa.eu/eli/dir/2014/32/oj/eng (accessed on 19 September 2018).
- Femine, A.D.; Gallo, D.; Landi, C.; Luiso, M. Advanced Instrument for Field Calibration of Electrical Energy Meters. IEEE Trans. Instrum. Meas. 2009, 58, 618–625. [Google Scholar] [CrossRef]
- Labib, L.; Billah, M.; Rana, G.M.S.M.; Sadat, M.N.; Kibria, M.G.; Islam, M.R. Design and implementation of low-cost universal smart energy meter with demand side load management. Transm. Distrib. IET Gener. 2017, 11, 3938–3945. [Google Scholar] [CrossRef]
- Simonov, M.; Chicco, G.; Zanetto, G. Event-Driven Energy Metering: Principles and Applications. IEEE Trans. Ind. Appl. 2017, 53, 3217–3227. [Google Scholar] [CrossRef]
- Kinoshita, Y.; Iwabuchi, K.; Miyazaki, Y. Distribution voltage monitoring and control utilising smart meters. CIRED-Open Access Proc. J. 2017, 2017, 1043–1047. [Google Scholar] [CrossRef]
- Borges, F.A.S.; Fernandes, R.A.S.; Silva, I.N.; Silva, C.B.S. Feature Extraction and Power Quality Disturbances Classification Using Smart Meters Signals. IEEE Trans. Ind. Inform. 2016, 12, 824–833. [Google Scholar] [CrossRef]
- Albu, M.M.; Sănduleac, M.; Stănescu, C. Syncretic Use of Smart Meters for Power Quality Monitoring in Emerging Networks. IEEE Trans. Smart Grid 2017, 8, 485–492. [Google Scholar] [CrossRef]
- Poursharif, G.; Brint, A.; Black, M.; Marshall, M. Using smart meters to estimate low-voltage losses. Transm. Distrib. IET Gener. 2018, 12, 1206–1212. [Google Scholar] [CrossRef]
- Bat-Erdene, B.; Lee, B.; Kim, M.Y.; Ahn, T.H.; Kim, D. Extended smart meters-based remote detection method for illegal electricity usage. Transm. Distrib. IET Gener. 2013, 7, 1332–1343. [Google Scholar] [CrossRef]
- Phadke, A.G.; Thorp, J.S. Synchronized Phasor Measurements and Their Applications. In Power Electronics and Power Systems; Springer: New York, NY, USA, 2008; ISBN 978-1-4419-4563-1. [Google Scholar]
- Monti, A.; Muscas, C.; Ponci, F. Phasor Measurement Units and Wide Area Monitoring Systems from the Sensors to the System, 1st ed.; Elsevier Academic Press: Amsterdam, The Netherlands, 2016; ISBN 978-0-12-804569-5. [Google Scholar]
- IEEE Standard for Synchrophasor Measurements for Power Systems; IEEE Std C371181-2011 Revis. IEEE Std C37118-2005; IEEE: Piscataway, NJ, USA, 2011. [CrossRef]
- IEEE Standard for Synchrophasor Measurements for Power Systems–Amendment 1: Modification of Selected Performance Requirements; IEEE Std C371181a-2014 Amend. IEEE Std C371181-2011; IEEE: Piscataway, NJ, USA, 2014. [CrossRef]
- Angioni, A.; Lipari, G.; Pau, M.; Ponci, F.; Monti, A. A Low Cost PMU to Monitor Distribution Grids. In Proceedings of the 2017 IEEE International Workshop on Applied Measurements for Power Systems (AMPS), Liverpool, UK, 20–22 September 2017. [Google Scholar]
- Tosato, P.; Macii, D.; Brunelli, D. Implementation of phasor measurement units on low-cost embedded platforms: A feasibility study. In Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Turin, Italy, 22–25 May 2017. [Google Scholar]
- Zhao, X.; Laverty, D.M.; McKernan, A.; Morrow, D.; McLaughlin, K.; Sezer, S. GPS-Disciplined Analog-to-Digital Converter for Phasor Measurement Applications. IEEE Trans. Instrum. Meas. 2017, 66, 2349–2357. [Google Scholar] [CrossRef]
- Castello, P.; Liu, J.; Muscas, C.; Pegoraro, P.A.; Ponci, F.; Monti, A. A Fast and Accurate PMU Algorithm for P+M Class Measurement of Synchrophasor and Frequency. IEEE Trans. Instrum. Meas. 2014, 63, 2837–2845. [Google Scholar] [CrossRef]
- Von Meier, A.; Culler, D.; McEachern, A.; Arghandeh, R. Micro-synchrophasors for distribution systems. In Proceedings of the ISGT 2014, Washington, DC, USA, 19–22 February 2014. [Google Scholar]
- Romano, P.; Paolone, M. Enhanced Interpolated-DFT for Synchrophasor Estimation in FPGAs: Theory, Implementation, and Validation of a PMU Prototype. IEEE Trans. Instrum. Meas. 2014, 63, 2824–2836. [Google Scholar] [CrossRef]
- Derviškadić, A.; Romano, P.; Paolone, M. Iterative-Interpolated DFT for Synchrophasor Estimation: A Single Algorithm for P- and M-Class Compliant PMUs. IEEE Trans. Instrum. Meas. 2018, 67, 547–558. [Google Scholar] [CrossRef]
- Castello, P.; Ferrero, R.; Pegoraro, P.A.; Toscani, S. Effect of Unbalance on Positive-Sequence Synchrophasor, Frequency, and ROCOF Estimations. IEEE Trans. Instrum. Meas. 2018, 67, 1036–1046. [Google Scholar] [CrossRef]
- Colangelo, D.; Zanni, L.; Pignati, M.; Romano, P.; Paolone, M.; Braun, J.P.; Bernier, L.G. Architecture and characterization of a calibrator for PMUs operating in power distribution systems. In Proceedings of the 2015 IEEE Eindhoven Power Tech, Eindhoven, The Netherlands, 29 June–2 July 2015. [Google Scholar]
- Frigo, G.; Colangelo, D.; Derviškadić, A.; Pignati, M.; Narduzzi, C.; Paolone, M. Definition of Accurate Reference Synchrophasors for Static and Dynamic Characterization of PMUs. IEEE Trans. Instrum. Meas. 2017, 66, 2233–2246. [Google Scholar] [CrossRef]
- IEC 61850-9-2:2011 | IEC Webstore | Cyber Security, Smart City, LVDC. Available online: https://webstore.iec.ch/publication/6023 (accessed on 2 August 2018).
- Castello, P.; Ferrari, P.; Flammini, A.; Muscas, C.; Rinaldi, S. A New IED With PMU Functionalities for Electrical Substations. IEEE Trans. Instrum. Meas. 2013, 62, 3209–3217. [Google Scholar] [CrossRef]
- Lixia, M.; Benigni, A.; Flammini, A.; Muscas, C.; Ponci, F.; Monti, A. A Software-Only PTP Synchronization for Power System State Estimation with PMUs. IEEE Trans. Instrum. Meas. 2012, 61, 1476–1485. [Google Scholar] [CrossRef]
- Castello, P.; Ferrari, P.; Flammini, A.; Muscas, C.; Pegoraro, P.A.; Rinaldi, S. A Distributed PMU for Electrical Substations With Wireless Redundant Process Bus. IEEE Trans. Instrum. Meas. 2015, 64, 1149–1157. [Google Scholar] [CrossRef]
- Rizzi, M.; Lipiñski, M.; Ferrari, P.; Rinaldi, S.; Flammini, A. White Rabbit clock synchronization: Ultimate limits on close-in phase noise and short-term stability due to FPGA implementation. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2018, 65, 1726–1737. [Google Scholar] [CrossRef] [PubMed]
- Castello, P.; Muscas, C.; Pegoraro, P.A.; Sulis, S. Adaptive management of synchrophasor latency for an active phasor data concentrator. In Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Turin, Italy, 22–25 May 2017. [Google Scholar]
- Meloni, A.; Pegoraro, P.A.; Atzori, L.; Sulis, S. Bandwidth and Accuracy-Aware State Estimation for Smart Grids Using Software Defined Networks. Energies 2017, 10, 858. [Google Scholar] [CrossRef]
- Meloni, A.; Pegoraro, P.A.; Atzori, L.; Benigni, A.; Sulis, S. Cloud-based IoT solution for state estimation in smart grids: Exploiting virtualization and edge-intelligence technologies. Comput. Netw. 2018, 130, 156–165. [Google Scholar] [CrossRef]
- Pegoraro, P.A.; Brady, K.; Castello, P.; Muscas, C.; von Meier, A. Line Impedance Estimation based on Synchrophasor Measurements for Power Distribution Systems. IEEE Trans. Instrum. Meas. 2018, in press. [Google Scholar]
- Von Meier, A.; Stewart, E.; McEachern, A.; Andersen, M.; Mehrmanesh, L. Precision Micro-Synchrophasors for Distribution Systems: A Summary of Applications. IEEE Trans. Smart Grid 2017, 8, 2926–2936. [Google Scholar] [CrossRef]
- Pau, M.; Pegoraro, P.A.; Sulis, S. Efficient Branch-Current-Based Distribution System State Estimation Including Synchronized Measurements. IEEE Trans. Instrum. Meas. 2013, 62, 2419–2429. [Google Scholar] [CrossRef]
- Sarri, S.; Zanni, L.; Popovic, M.; Boudec, J.Y.L.; Paolone, M. Performance Assessment of Linear State Estimators Using Synchrophasor Measurements. IEEE Trans. Instrum. Meas. 2016, 65, 535–548. [Google Scholar] [CrossRef]
- Liu, J.; Tang, J.; Ponci, F.; Monti, A.; Muscas, C.; Pegoraro, P.A. Trade-Offs in PMU Deployment for State Estimation in Active Distribution Grids. IEEE Trans. Smart Grid 2012, 3, 915–924. [Google Scholar] [CrossRef]
- Liu, J.; Ponci, F.; Monti, A.; Muscas, C.; Pegoraro, P.A.; Sulis, S. Optimal Meter Placement for Robust Measurement Systems in Active Distribution Grids. IEEE Trans. Instrum. Meas. 2014, 63, 1096–1105. [Google Scholar] [CrossRef]
- Pegoraro, P.A.; Sulis, S. Robustness-Oriented Meter Placement for Distribution System State Estimation in Presence of Network Parameter Uncertainty. IEEE Trans. Instrum. Meas. 2013, 62, 954–962. [Google Scholar] [CrossRef]
- Chen, X.; Lin, J.; Wan, C.; Song, Y.; You, S.; Zong, Y.; Guo, W.; Li, Y. Optimal Meter Placement for Distribution Network State Estimation: A Circuit Representation Based MILP Approach. IEEE Trans. Power Syst. 2016, 31, 4357–4370. [Google Scholar] [CrossRef]
- Xygkis, T.; Korres, G.; Manousakis, N.M. Fisher information based meter placement in distribution grids via the D-optimal experimental design. IEEE Trans. Smart Grid 2017, 9, 1452–1461. [Google Scholar] [CrossRef]
- Giustina, D.D.; Pau, M.; Pegoraro, P.A.; Ponci, F.; Sulis, S. Electrical distribution system state estimation: Measurement issues and challenges. IEEE Instrum. Meas. Mag. 2014, 17, 36–42. [Google Scholar] [CrossRef]
- Waeresch, D.; Brandalik, R.; Wellssow, W.H.; Jordan, J.; Bischler, R.; Schneider, N. Field test of a linear three-phase low-voltage state estimation system based on smart meter data. CIRED-Open Access Proc. J. 2017, 2017, 1773–1776. [Google Scholar] [CrossRef]
- Chen, Q.; Kaleshi, D.; Fan, Z.; Armour, S. Impact of Smart Metering Data Aggregation on Distribution System State Estimation. IEEE Trans. Ind. Inform. 2016, 12, 1426–1437. [Google Scholar] [CrossRef]
- Al-Wakeel, A.; Wu, J.; Jenkins, N. State estimation of medium voltage distribution networks using smart meter measurements. Appl. Energy 2016, 184, 207–218. [Google Scholar] [CrossRef]
- Raza, M.Q.; Khosravi, A. A review on artificial intelligence based load demand forecasting techniques for smart grid and buildings. Renew. Sustain. Energy Rev. 2015, 50, 1352–1372. [Google Scholar] [CrossRef]
- Zhou, K.; Fu, C.; Yang, S. Big data driven smart energy management: From big data to big insights. Renew. Sustain. Energy Rev. 2016, 56, 215–225. [Google Scholar] [CrossRef]
- Al-Wakeel, A.; Wu, J.; Jenkins, N. k-means based load estimation of domestic smart meter measurements. Appl. Energy 2017, 194, 333–342. [Google Scholar] [CrossRef]
- Quilumba, F.L.; Lee, W.J.; Huang, H.; Wang, D.Y.; Szabados, R.L. Using Smart Meter Data to Improve the Accuracy of Intraday Load Forecasting Considering Customer Behavior Similarities. IEEE Trans. Smart Grid 2015, 6, 911–918. [Google Scholar] [CrossRef]
- Singh, R.; Pal, B.C.; Jabr, R.A. Statistical Representation of Distribution System Loads Using Gaussian Mixture Model. IEEE Trans. Power Syst. 2010, 25, 29–37. [Google Scholar] [CrossRef]
- Räsänen, T.; Voukantsis, D.; Niska, H.; Karatzas, K.; Kolehmainen, M. Data-based method for creating electricity use load profiles using large amount of customer-specific hourly measured electricity use data. Appl. Energy 2010, 87, 3538–3545. [Google Scholar] [CrossRef]
- Pegoraro, P.A.; Angioni, A.; Pau, M.; Monti, A.; Muscas, C.; Ponci, F.; Sulis, S. Bayesian Approach for Distribution System State Estimation With Non-Gaussian Uncertainty Models. IEEE Trans. Instrum. Meas. 2017, 66, 2957–2966. [Google Scholar] [CrossRef]
- Primadianto, A.; Lu, C.N. A Review on Distribution System State Estimation. IEEE Trans. Power Syst. 2017, 32, 3875–3883. [Google Scholar] [CrossRef]
- Pegoraro, P.A.; Meloni, A.; Atzori, L.; Castello, P.; Sulis, S. PMU-Based Distribution System State Estimation with Adaptive Accuracy Exploiting Local Decision Metrics and IoT Paradigm. IEEE Trans. Instrum. Meas. 2017, 66, 704–714. [Google Scholar] [CrossRef]
- Pau, M.; Ponci, F.; Monti, A.; Sulis, S.; Muscas, C.; Pegoraro, P.A. An Efficient and Accurate Solution for Distribution System State Estimation with Multiarea Architecture. IEEE Trans. Instrum. Meas. 2017, 66, 910–919. [Google Scholar] [CrossRef]
- Kang, J.W.; Choi, D.H. Distributed multi-area WLS state estimation integrating measurements weight update. Transm. Distrib. IET Gener. 2017, 11, 2552–2561. [Google Scholar] [CrossRef]
- Zhao, H.; Magoulès, F. A review on the prediction of building energy consumption. Renew. Sustain. Energy Rev. 2012, 16, 3586–3592. [Google Scholar] [CrossRef]
- Foucquier, A.; Robert, S.; Suard, F.; Stéphan, L.; Jay, A. State of the art in building modelling and energy performances prediction: A review. Renew. Sustain. Energy Rev. 2013, 23, 272–288. [Google Scholar] [CrossRef]
- Newsham, G.R.; Birt, B.J. Building-level Occupancy Data to Improve ARIMA-based Electricity Use Forecasts. In Proceedings of the 2nd ACM Workshop on Embedded Sensing Systems for Energy-Efficiency in Building, Zurich, Switzerland, 2 November 2010; pp. 13–18. [Google Scholar]
- Goel, A.; Goel, A. Regression Based Forecast of Electricity Demand of New Delhi. Int. J. Sci. Res. Publ. 2014, 4, 7. [Google Scholar]
- Amber, K.P.; Aslam, M.W.; Hussain, S.K. Electricity consumption forecasting models for administration buildings of the UK higher education sector. Energy Build. 2015, 90, 127–136. [Google Scholar] [CrossRef]
- Rao, M.S.S.; Soman, S.A.; Menezes, B.L.; Chawande, P.; Dipti, P.; Ghanshyam, T. An expert system approach to short-term load forecasting for Reliance Energy Limited, Mumbai. In Proceedings of the 2006 IEEE Power India Conference, New Delhi, India, 10–12 April 2006. [Google Scholar]
- Dedinec, A.; Filiposka, S.; Dedinec, A.; Kocarev, L. Deep belief network based electricity load forecasting: An analysis of Macedonian case. Energy 2016, 115, 1688–1700. [Google Scholar] [CrossRef]
- Ilic, S.; Vukmirovic, S.; Erdeljan, A.; Kulic, F. Hybrid artificial neural network system for short-term load forecasting. Therm. Sci. 2012, 16, 215–224. [Google Scholar] [CrossRef]
- Hernández, L.; Baladrón, C.; Aguiar, J.M.; Carro, B.; Sánchez-Esguevillas, A.; Lloret, J. Artificial neural networks for short-term load forecasting in microgrids environment. Energy 2014, 75, 252–264. [Google Scholar] [CrossRef]
- Mahmoud, T.S.; Habibi, D.; Hassan, M.Y.; Bass, O. Modelling self-optimised short term load forecasting for medium voltage loads using tunning fuzzy systems and Artificial Neural Networks. Energy Convers. Manag. 2015, 106, 1396–1408. [Google Scholar] [CrossRef]
- Bengio, Y. Learning Deep Architectures for AI. Available online: https://www.nowpublishers.com/article/Details/MAL-006 (accessed on 19 September 2018).
- Mocanu, E.; Nguyen, P.H.; Gibescu, M.; Kling, W.L. Deep learning for estimating building energy consumption. Sustain. Energy Grids Netw. 2016, 6, 91–99. [Google Scholar] [CrossRef]
- Paterakis, N.G.; Mocanu, E.; Gibescu, M.; Stappers, B.; Alst, W. Deep learning versus traditional machine learning methods for aggregated energy demand prediction. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Turin, Italy, 26–29 September 2017. [Google Scholar]
- Mocanu, E.; Mocanu, D.C.; Nguyen, P.H.; Liotta, A.; Webber, M.E.; Gibescu, M.; Slootweg, J.G. On-line Building Energy Optimization using Deep Reinforcement Learning. IEEE Trans. Smart Grid 2018. [Google Scholar] [CrossRef]
- González, P.A.; Zamarreño, J.M. Prediction of hourly energy consumption in buildings based on a feedback artificial neural network. Energy Build. 2005, 37, 595–601. [Google Scholar] [CrossRef]
- Xu, X.; Taylor, J.E.; Pisello, A.L.; Culligan, P.J. The impact of place-based affiliation networks on energy conservation: An holistic model that integrates the influence of buildings, residents and the neighborhood context. Energy Build. 2012, 55, 637–646. [Google Scholar] [CrossRef]
- IEC 61970-1:2005 | IEC Webstore | Automation, Cyber Security, Smart City, Smart Energy, Smart Grid. Available online: https://webstore.iec.ch/publication/6208 (accessed on 25 July 2018).
- Chen, C.; Duan, S.; Cai, T.; Liu, B.; Hu, G. Smart energy management system for optimal microgrid economic operation. IET Renew. Power Gener. 2011, 5, 258–267. [Google Scholar] [CrossRef]
- Celli, G.; Pegoraro, P.A.; Pilo, F.; Pisano, G.; Sulis, S. DMS Cyber-Physical Simulation for Assessing the Impact of State Estimation and Communication Media in Smart Grid Operation. IEEE Trans. Power Syst. 2014, 29, 2436–2446. [Google Scholar] [CrossRef]
- Chauhan, A.; Saini, R.P. A review on Integrated Renewable Energy System based power generation for stand-alone applications: Configurations, storage options, sizing methodologies and control. Renew. Sustain. Energy Rev. 2014, 38, 99–120. [Google Scholar] [CrossRef]
- Weitzel, T.; Glock, C.H. Energy management for stationary electric energy storage systems: A systematic literature review. Eur. J. Oper. Res. 2018, 264, 582–606. [Google Scholar] [CrossRef]
- Zare, K.; Nojavan, S. Operation of Distributed Energy Resources in Smart Distribution Networks; Academic Press: Amsterdam, The Netherlands, 2018; ISBN 978-0-12-814892-1. [Google Scholar]
- Serpi, A.; Gatto, G.; Damiano, A.; Marongiu, I. Model Predictive Control with Input and Output Constraints. In Model Predictive Control: Theory, Practices and Future Challenges; Nova Science Pub Inc.: Hauppauge, NY, USA, 2015; ISBN 978-1-63463-859-3. [Google Scholar]
- Michalewicz, Z.; Fogel, D.B. How to Solve It: Modern Heuristics, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2004; ISBN 978-3-540-22494-5. [Google Scholar]
- Rafique, S.F.; Jianhua, Z. Energy management system, generation and demand predictors: A review. Transm. Distrib. IET Gener. 2018, 12, 519–530. [Google Scholar] [CrossRef]
- Damiano, A.; Gatto, G.; Marongiu, I.; Porru, M.; Serpi, A. Real-Time Control Strategy of Energy Storage Systems for Renewable Energy Sources Exploitation. IEEE Trans. Sustain. Energy 2014, 5, 567–576. [Google Scholar] [CrossRef]
- Amini, M.H.; Nabi, B.; Haghifam, M. Load management using multi-agent systems in smart distribution network. In Proceedings of the 2013 IEEE Power Energy Society General Meeting, Vancouver, BC, USA, 21–25 July 2013. [Google Scholar]
- Fallah, S.N.; Deo, R.C.; Shojafar, M.; Conti, M.; Shamshirband, S. Computational Intelligence Approaches for Energy Load Forecasting in Smart Energy Management Grids: State of the Art, Future Challenges, and Research Directions. Energies 2018, 11, 596. [Google Scholar] [CrossRef]
- Agüera-Pérez, A.; Palomares-Salas, J.C.; González de la Rosa, J.J.; Florencias-Oliveros, O. Weather forecasts for microgrid energy management: Review, discussion and recommendations. Appl. Energy 2018, 228, 265–278. [Google Scholar] [CrossRef]
- IEA (International Energy Agency) Technology Roadmaps-Energy Storage. 2014. Available online: http://www.iea.org/publications/freepublications/publication/TechnologyRoadmapEnergystorage.pdf (accessed on 19 September 2018).
- EASE (European Association for Storage of Energy)/EERA (European Energy Research Alliance) European Energy Storage Technology Development Roadmap towards 2030. 2013. Available online: http://ease-storage.eu/easeeera-energy-storage-technology-development-roadmap-towards-2030/ (accessed on 19 September 2018).
- EASE (European Association for Storage of Energy) Activity Report 2014. 2014. Available online: http://ease-storage.eu/wp-content/uploads/2015/10/EASE-Activity-Report-2014_LR.pdf (accessed on 19 September 2018).
- Gao, L.; Dougal, R.A.; Liu, S. Power enhancement of an actively controlled battery/ultracapacitor hybrid. IEEE Trans. Power Electron. 2005, 20, 236–243. [Google Scholar] [CrossRef]
- Chotia, I.; Chowdhury, S. Battery storage and hybrid battery supercapacitor storage systems: A comparative critical review. In Proceedings of the 2015 IEEE Innovative Smart Grid Technologies-Asia (ISGT ASIA 2015), Bangkok, Thailand, 3–6 November 2015. [Google Scholar]
- Porru, M.; Serpi, A.; Salimbeni, A.; Damiano, A. An advanced frequency-based energy management of hybrid energy storage systems for microgrids. In Proceedings of the IECON 2017-43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017. [Google Scholar]
- Serpi, A.; Porru, M.; Damiano, A. An Optimal Power and Energy Management by Hybrid Energy Storage Systems in Microgrids. Energies 2017, 10, 1909. [Google Scholar] [CrossRef]
- Serpi, A.; Porru, M.; Damiano, A. A Novel Highly Integrated Hybrid Energy Storage System for Electric Propulsion and Smart Grid Applications. In Advancements in Energy Storage Technologies; IntechOpen: London, UK, 2018. [Google Scholar]
- Kabalci, Y. A survey on smart metering and smart grid communication. Renew. Sustain. Energy Rev. 2016, 57, 302–318. [Google Scholar] [CrossRef]
- Foudeh, H.A.; Mokhtar, A.S. Automated Meter Reading and Advanced Metering Infrastructure projects. In Proceedings of the 2015 9th Jordanian International Electrical and Electronics Engineering Conference (JIEEEC), Amman, Jordan, 12–14 October 2015. [Google Scholar]
- Rua, D.; Issicaba, D.; Soares, F.J.; Almeida, P.M.R.; Rei, R.J.; Lopes, J.A.P. Advanced Metering Infrastructure functionalities for electric mobility. In Proceedings of the 2010 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe), Gothenburg, Sweden, 11–13 October 2010. [Google Scholar]
- Jiang, J.; Qian, Y. Distributed Communication Architecture for Smart Grid Applications. IEEE Commun. Mag. 2016, 54, 60–67. [Google Scholar] [CrossRef]
- Pilloni, V.; Floris, A.; Meloni, A.; Atzori, L. Smart Home Energy Management Including Renewable Sources: A QoE-Driven Approach. IEEE Trans. Smart Grid 2018, 9, 2006–2018. [Google Scholar] [CrossRef]
- Saputro, N.; Akkaya, K. Investigation of Smart Meter Data Reporting Strategies for Optimized Performance in Smart Grid AMI Networks. IEEE Internet Things J. 2017, 4, 894–904. [Google Scholar] [CrossRef]
- Zhou, J.; Hu, R.Q.; Qian, Y. Scalable Distributed Communication Architectures to Support Advanced Metering Infrastructure in Smart Grid. IEEE Trans. Parallel Distrib. Syst. 2012, 23, 1632–1642. [Google Scholar] [CrossRef]
- Sharma, K.; Saini, L.M. Power-line communications for smart grid: Progress, challenges, opportunities and status. Renew. Sustain. Energy Rev. 2017, 67, 704–751. [Google Scholar] [CrossRef]
- Yoldaş, Y.; Önen, A.; Muyeen, S.M.; Vasilakos, A.V.; Alan, İ. Enhancing smart grid with microgrids: Challenges and opportunities. Renew. Sustain. Energy Rev. 2017, 72, 205–214. [Google Scholar] [CrossRef]
- Galli, S.; Scaglione, A.; Wang, Z. Power Line Communications and the Smart Grid. In Proceedings of the 2010 First IEEE International Conference on Smart Grid Communications, Gaithersburg, MD, USA, 4–6 October 2010. [Google Scholar]
- Kuzlu, M.; Pipattanasomporn, M.; Rahman, S. Communication network requirements for major smart grid applications in HAN, NAN and WAN. Comput. Netw. 2014, 67, 74–88. [Google Scholar] [CrossRef]
- Mahmood, A.; Javaid, N.; Razzaq, S. A review of wireless communications for smart grid. Renew. Sustain. Energy Rev. 2015, 41, 248–260. [Google Scholar] [CrossRef]
- Madueño, G.C.; Nielsen, J.J.; Kim, D.M.; Pratas, N.K.; Stefanović, Č.; Popovski, P. Assessment of LTE Wireless Access for Monitoring of Energy Distribution in the Smart Grid. IEEE J. Sel. Areas Commun. 2016, 34, 675–688. [Google Scholar] [CrossRef]
- Garau, M.; Anedda, M.; Desogus, C.; Ghiani, E.; Murroni, M.; Celli, G. A 5G cellular technology for distributed monitoring and control in smart grid. In Proceedings of the 2017 IEEE International Symposium on Broadband Multimedia Systems and Broadcasting (BMSB), Cagliari, Italy, 7–9 June 2017. [Google Scholar]
- Panwar, N.; Sharma, S.; Singh, A.K. A survey on 5G: The next generation of mobile communication. Phys. Commun. 2016, 18, 64–84. [Google Scholar] [CrossRef]
- Rappaport, T.S.; Sun, S.; Mayzus, R.; Zhao, H.; Azar, Y.; Wang, K.; Wong, G.N.; Schulz, J.K.; Samimi, M.; Gutierrez, F. Millimeter Wave Mobile Communications for 5G Cellular: It Will Work! IEEE Access 2013, 1, 335–349. [Google Scholar] [CrossRef]
- Hong, W.; Baek, K.H.; Lee, Y.; Kim, Y.; Ko, S.T. Study and prototyping of practically large-scale mmWave antenna systems for 5G cellular devices. IEEE Commun. Mag. 2014, 52, 63–69. [Google Scholar] [CrossRef]
- Zhang, T.; Li, R.; Jin, G.; Wei, G.; Tentzeris, M.M. A Novel Multiband Planar Antenna for GSM/UMTS/LTE/Zigbee/RFID Mobile Devices. IEEE Trans. Antennas Propag. 2011, 59, 4209–4214. [Google Scholar] [CrossRef]
- Lizzi, L.; Ferrero, F.; Monin, P.; Danchesi, C.; Boudaud, S. Design of miniature antennas for IoT applications. In Proceedings of the 2016 IEEE Sixth International Conference on Communications and Electronics (ICCE), Ha Long, Vietnam, 27–29 July 2016. [Google Scholar]
- Ferrero, F.; Lizzi, L.; Danchesi, C.; Boudaud, S. Environmental sensitivity of miniature antennas for IoT devices. In Proceedings of the 2016 IEEE International Symposium on Antennas and Propagation (APSURSI), Fajardo, Puerto Rico, 26 June–1 July 2016. [Google Scholar]
- Dong, Y.; Choi, J.; Itoh, T. Folded Strip/Slot Antenna with Extended Bandwidth for WLAN Application. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 673–676. [Google Scholar] [CrossRef]
- Viani, F.; Salucci, M.; Robol, F.; Massa, A. Multiband fractal Zigbee/WLAN antenna for ubiquitous wireless environments. J. Electromagn. Waves Appl. 2012, 26, 1554–1562. [Google Scholar] [CrossRef]
- Bekasiewicz, A.; Koziel, S. Compact UWB monopole antenna for internet of things applications. Electron. Lett. 2016, 52, 492–494. [Google Scholar] [CrossRef]
- Zhao, Y. Dual-wideband microstrip antenna for LTE indoor base stations. Electron. Lett. 2016, 52, 576–578. [Google Scholar] [CrossRef]
- Rizwan, M.; Abbasi, M.A.B.; Saleem, I.; Abbas, S.M.; Shehzad, K. Review of Multiband Monopole Microstrip Patch Antenna for WiMAX Applications. In Proceedings of the International Conference on Advance Modeling and Simulation, Rawalpindi, Pakistan, 28–30 November 2011. [Google Scholar]
- Rooyen, M.; Odendaal, J.W.; Joubert, J. High-Gain Directional Antenna for WLAN and WiMAX Applications. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 286–289. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, G.; Yin, Y.; Wu, J. Design of a Dual-Band High-Gain Antenna Array for WLAN and WiMAX Base Station. IEEE Antennas Wirel. Propag. Lett. 2014, 13, 1721–1724. [Google Scholar] [CrossRef]
- Introduction to NISTIR 7628 Guidelines for Smart Grid Cyber Security. Available online: https://www.smartgrid.gov/document/introduction_nistir_7628_guidelines_smart_grid_cyber_security_0 (accessed on 31 July 2018).
- Gao, Q. Biometric authentication in Smart Grid. In Proceedings of the 2012 International Energy and Sustainability Conference (IESC), Farmingdale, NY, USA, 22–23 March 2012. [Google Scholar]
- Kathrine, G.J.W.; Kirubakaran, E. Biometric Authentication and Authorization System for Grid Security. Int. J. Hybrid Inf. Technol. 2011, 4, 16. [Google Scholar]
- Ijaz, S.; Shah, M.A.; Khan, A.; Ahmed, M. Smart Cities: A Survey on Security Concerns. Int. J. Adv. Comput. Sci. Appl. IJACSA 2016, 7. [Google Scholar] [CrossRef]
- Engel, E.; Kovalev, I.V.; Ermoshkina, A. The biometric-based module of smart grid system. IOP Conf. Ser. Mater. Sci. Eng. 2015, 94, 012007. [Google Scholar] [CrossRef]
- Springer. Handbook of Biometrics; Jain, A., Flynn, P., Ross, A.A., Eds.; Springer: New York, NY, USA, 2008; ISBN 978-0-387-71040-2. [Google Scholar]
- Insight on Commercial Biometrics. Available online: https://ww2.frost.com/frost-perspectives/insight-commercial-biometrics/ (accessed on 31 July 2018).
- Biometrics Market Forecasts | Tractica. Available online: https://www.tractica.com/research/biometrics-market-forecasts/ (accessed on 19 September 2018).
- Adler, A.; Schuckers, S.A.C. Biometric Vulnerabilities: Overview. In Encyclopedia of Biometrics; Springer: Boston, MA, USA, 2014. [Google Scholar]
- Marcel, S.; Nixon, M.S.; Li, S.Z. (Eds.) Handbook of Biometric Anti-Spoofing: Rusted Biometrics under Spoofing Attacks; Advances in Computer Vision and Pattern Recognition; Springer: London, UK, 2014; ISBN 978-1-4471-6523-1. [Google Scholar]
- Biggio, B.; Fumera, G.; Marcialis, G.L.; Roli, F. Statistical Meta-Analysis of Presentation Attacks for Secure Multibiometric Systems. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 561–575. [Google Scholar] [CrossRef] [PubMed]
- Ghiani, L.; Yambay, D.A.; Mura, V.; Marcialis, G.L.; Roli, F.; Schuckers, S.A. Review of the Fingerprint Liveness Detection (LivDet) competition series: 2009 to 2015. Image Vis. Comput. 2017, 58, 110–128. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Approach | Main Advantages | Critical Points |
|---|---|---|---|
| Measurement system and measurement types | Non-synchronized | Lower cost, lower communication requirements | Low reporting rates, lower accuracy, non-linear estimation procedures |
| Synchronized | Linear algorithms, high speed and reporting rate, high accuracy, phase-angle measurements | High cost, high communication requirements, low measurement redundancy | |
| Hybrid | High measurement redundancy, incremental infrastructure, quasi-linear iterative algorithms | System-dependent procedures, Multi-protocol infrastructure | |
| Architecture | Centralized | Simple coordination of procedures, single execution, centered control and processing | High communication requirements, high computational costs |
| Decentralized/Multiarea | Lower communication and computational needs, applicability to very large networks | Need of accurate synchronization and timing procedures, high inter-area data exchange requirements | |
| Reporting rate | Fixed | Fixed pacing, simple scheduling, constant monitoring | High communication requirements, high computational costs |
| Variable | Lower communication requirements, communication-aware procedures, flexible and event-driven strategies | More complex scheduling, risk of event loss, complex data merging procedures |
| Model | Advantages | Drawbacks |
|---|---|---|
| Physic-based | Easy to interpret in physical terms | Expensive or unavailable knowledges on the physical system could be needed |
| Data-driven | Focus on the significant variables, ignore the information that has little impact on the output, no physical knowledges are needed | Large amount of data required for the training phase, difficult to be interpret in physical terms, not suited for test cases not represented in the training set |
| Hybrid | Missing or expensive physical knowledges can be replaced by data estimated with data driven models | Not fully interpretable in physical terms |
| Category | Main Methods |
|---|---|
| Classical and Exact Solution | Linear Programming, Non-Linear Programming, Dynamic Programming, Rule-based, Model Predictive Control |
| Heuristic and Meta-Heuristic | Genetic Algorithms, Particle Swarm Optimization, Ant Colony Optimization, Simulated Annealing |
| Artificial Intelligent | Fuzzy Logic, Neural Networks, Multi-Agent System, Game Theory |
| ESS Technology | MG | VPP | EH-MES |
|---|---|---|---|
| RHS, PHS | • | ••• | •• |
| CAES | • | ••• | •• |
| HES | •• | •• | ••• |
| SMES | •• | • | • |
| FES | •• | •• | • |
| EB | ••• | •• | •• |
| UC | •• | • | • |
| Technology | Standards | Data rate | Frequency Band | Communication Range | Network |
|---|---|---|---|---|---|
| NB-PLC | IEC 61334, G3-PLC, PRIME, ITU-T G.HNEM, IEEE P1901.2 | Single carrier: tens of kbps. Multicarrier: <500 kbps | 3 ÷ 148.5 kHz (EU: CENELEC band 3–148.5 kHz) | >150 km | NAN, LAN, WAN |
| BB-PLC | IEEE 1901, ITU-T G.9960/61, HomePlug | <200 Mbps | 2÷86 MHz | <1.5 km | HAN |
| Fiber optics | IEEE 802.3ah, ITU-T G.983/984 | <10 Gbps | ~186÷236 THz | <60 km | WAN |
| WSN | IEEE 802.15.4 (ZigBee) | <250 kbps | 2.4 GHz EU: 868 MHz USA: 915 MHz | <1600 m | HAN, NAN |
| WiMAX | IEEE 802.16 | <1 Gbps | Typically 2.3, 2.5 and 3.5 GHz | Good: 0 ÷ 30 km Bad: 30 ÷ 100 km | NAN, LAN, WAN |
| Mobile communication | 2G, 3G, 3.5G, 4G, 4.5G, 5G (expected) | <1 Gbps | Typically 700, 850, 1800, 1900, 2100, 2300, 2600 MHz | Good: 0 ÷ 30 km Bad: 30 ÷ 100 km | LAN, WAN |
| Antenna | LTE | Zig-Bee | WLAN | WiMAX |
|---|---|---|---|---|
| Planar strips | • | • | - | - |
| Monopole | - | • | • | • |
| Microstrip | • | - | • | • |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghiani, E.; Serpi, A.; Pilloni, V.; Sias, G.; Simone, M.; Marcialis, G.; Armano, G.; Pegoraro, P.A. A Multidisciplinary Approach for the Development of Smart Distribution Networks. Energies 2018, 11, 2530. https://doi.org/10.3390/en11102530
Ghiani E, Serpi A, Pilloni V, Sias G, Simone M, Marcialis G, Armano G, Pegoraro PA. A Multidisciplinary Approach for the Development of Smart Distribution Networks. Energies. 2018; 11(10):2530. https://doi.org/10.3390/en11102530
Chicago/Turabian StyleGhiani, Emilio, Alessandro Serpi, Virginia Pilloni, Giuliana Sias, Marco Simone, Gianluca Marcialis, Giuliano Armano, and Paolo Attilio Pegoraro. 2018. "A Multidisciplinary Approach for the Development of Smart Distribution Networks" Energies 11, no. 10: 2530. https://doi.org/10.3390/en11102530
APA StyleGhiani, E., Serpi, A., Pilloni, V., Sias, G., Simone, M., Marcialis, G., Armano, G., & Pegoraro, P. A. (2018). A Multidisciplinary Approach for the Development of Smart Distribution Networks. Energies, 11(10), 2530. https://doi.org/10.3390/en11102530