Charge Equalization Controller Algorithm for Series-Connected Lithium-Ion Battery Storage Systems: Modeling and Applications



Abstract
:1. Introduction
2. Overview of Charge Equalization Controller
- (1)
- The overall process of the equalization controller is straightforward and efficient to be executed.
- (2)
- The equalization controller is active and thus is free of heat and energy dissipation problems.
- (3)
- The equalization control algorithm can be easily customized with the demand for any modification.
- (4)
- The controller can be applied to any size of battery storage systems with the power and voltage demand for different applications.
3. Modeling of the Charge Equalization Controller
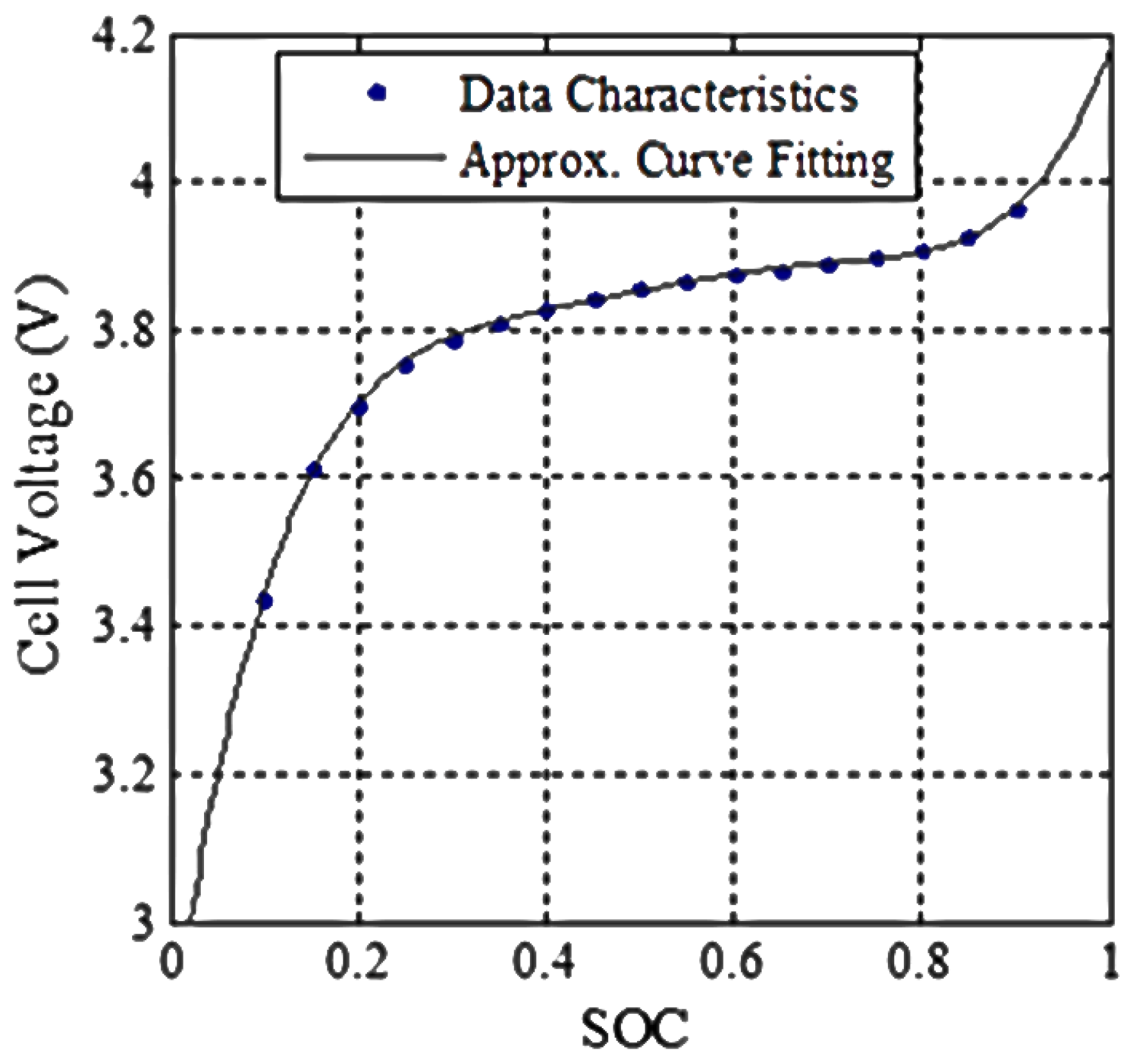
3.1. Modeling of EV Lithium-Ion Battery
3.2. Modeling of Optimal Power Rating
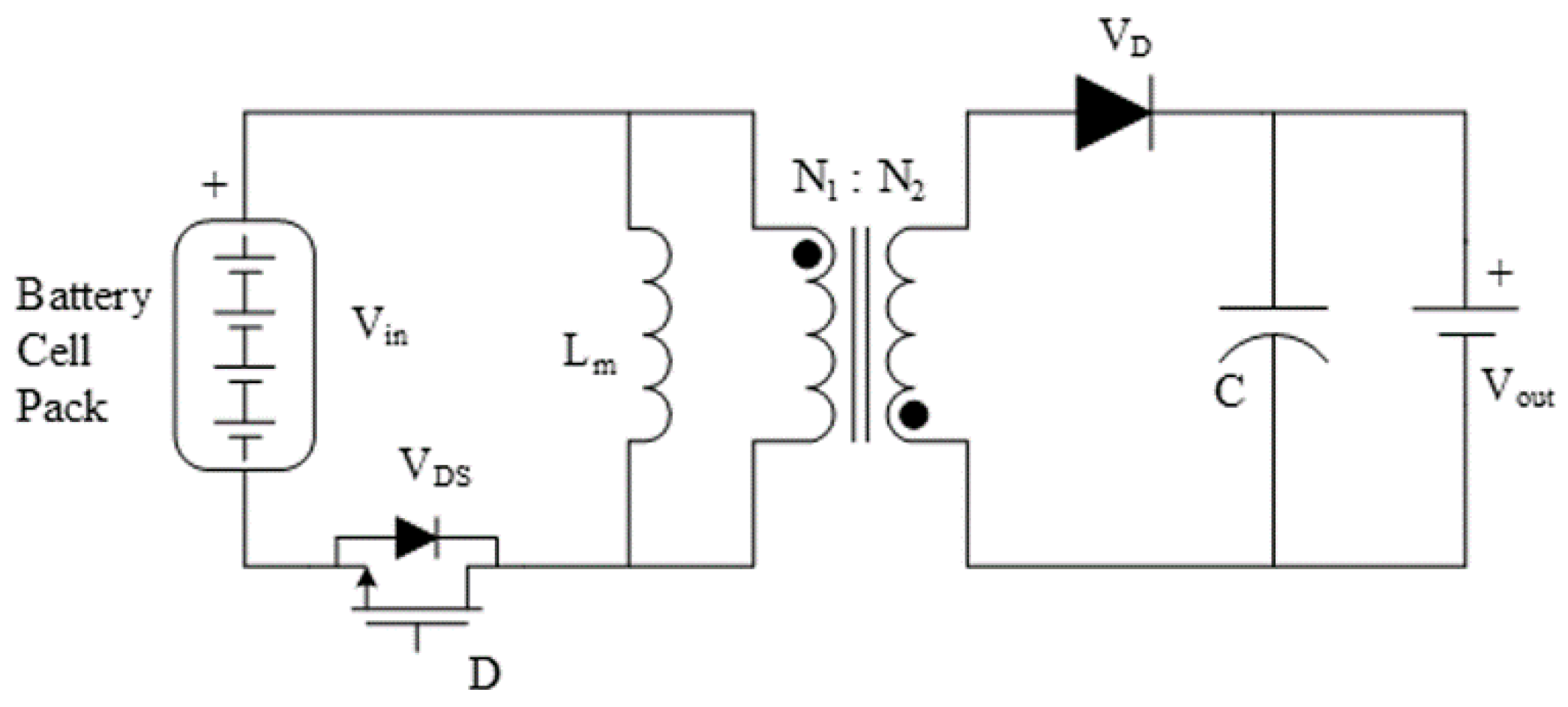
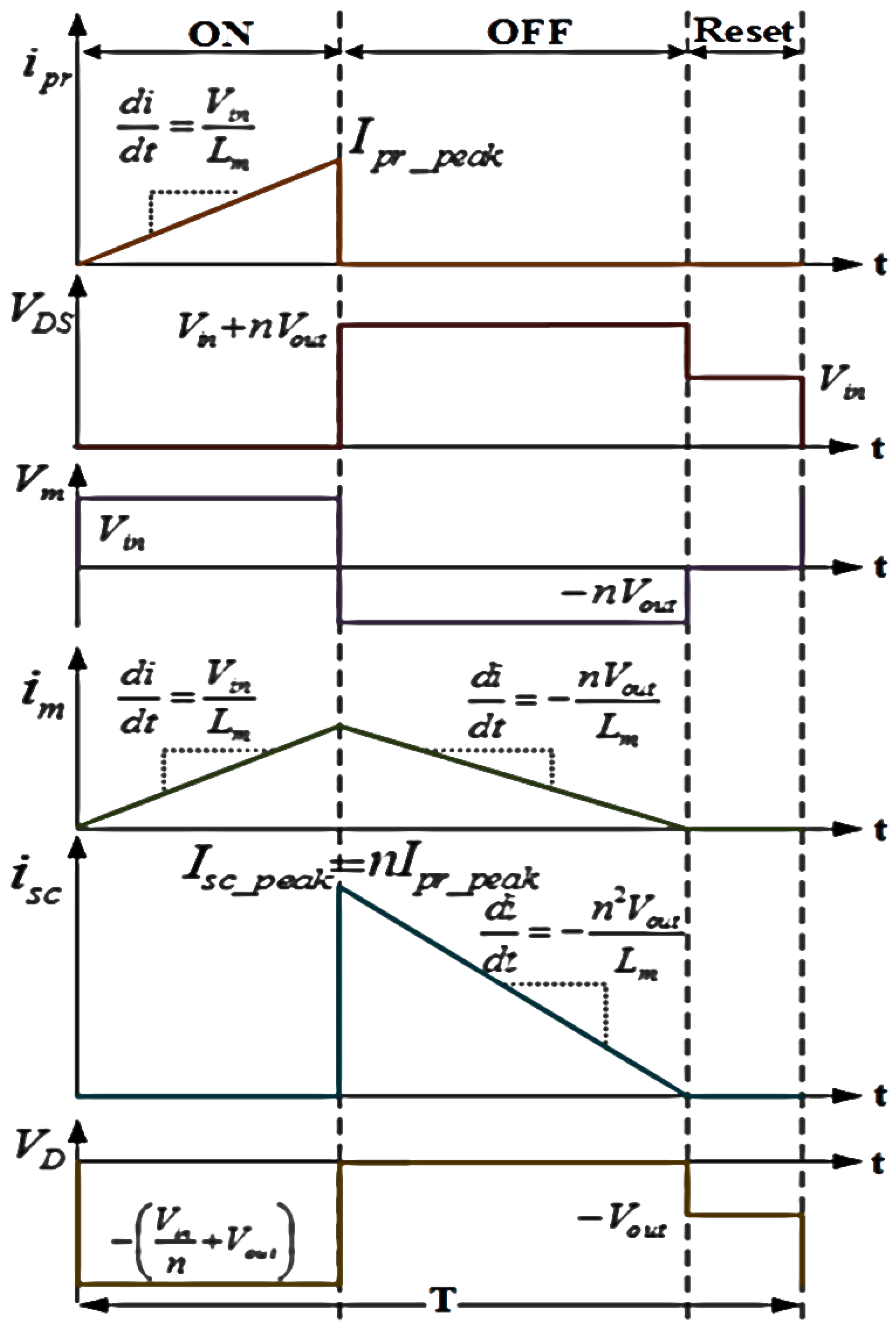
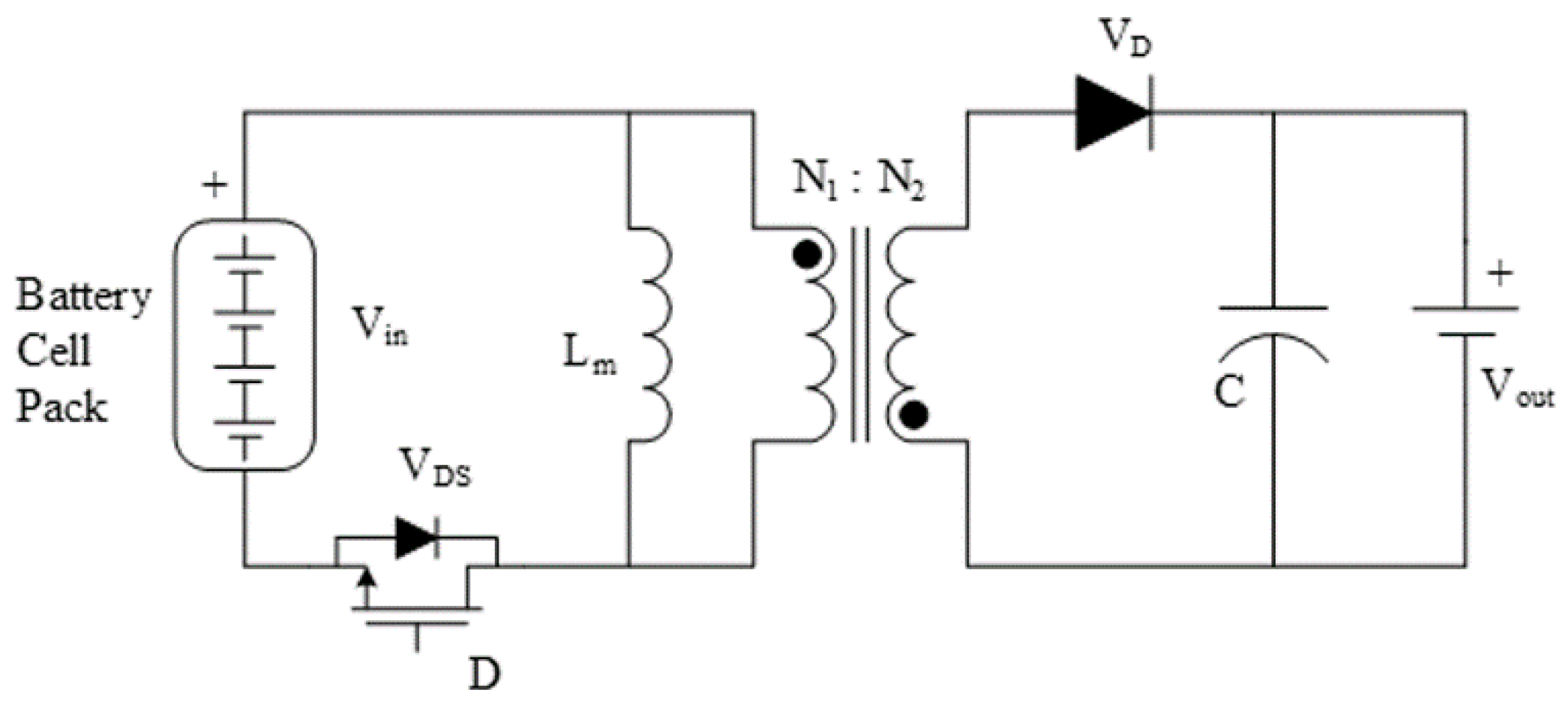
3.3. Modeling of Bidirectional Flyback DC–DC Power Converter
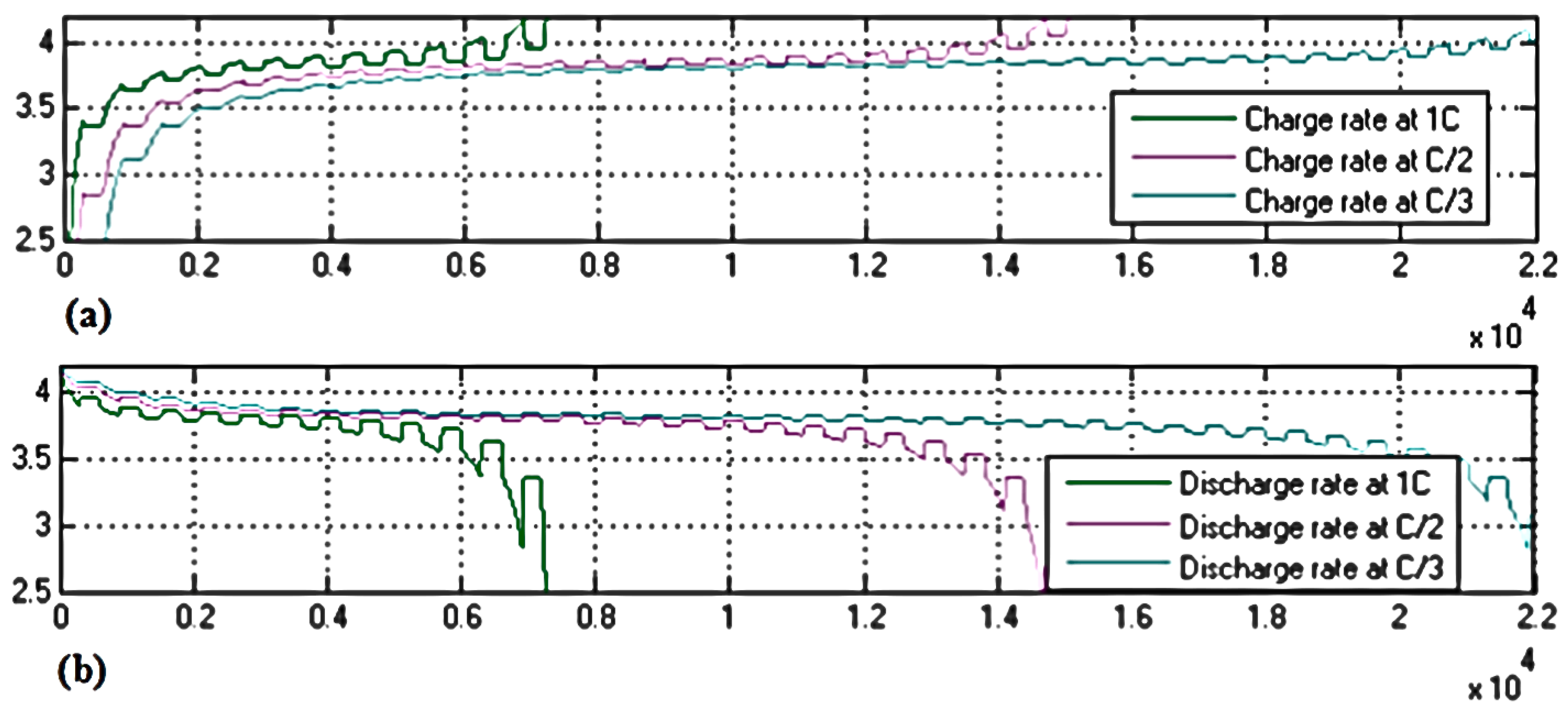
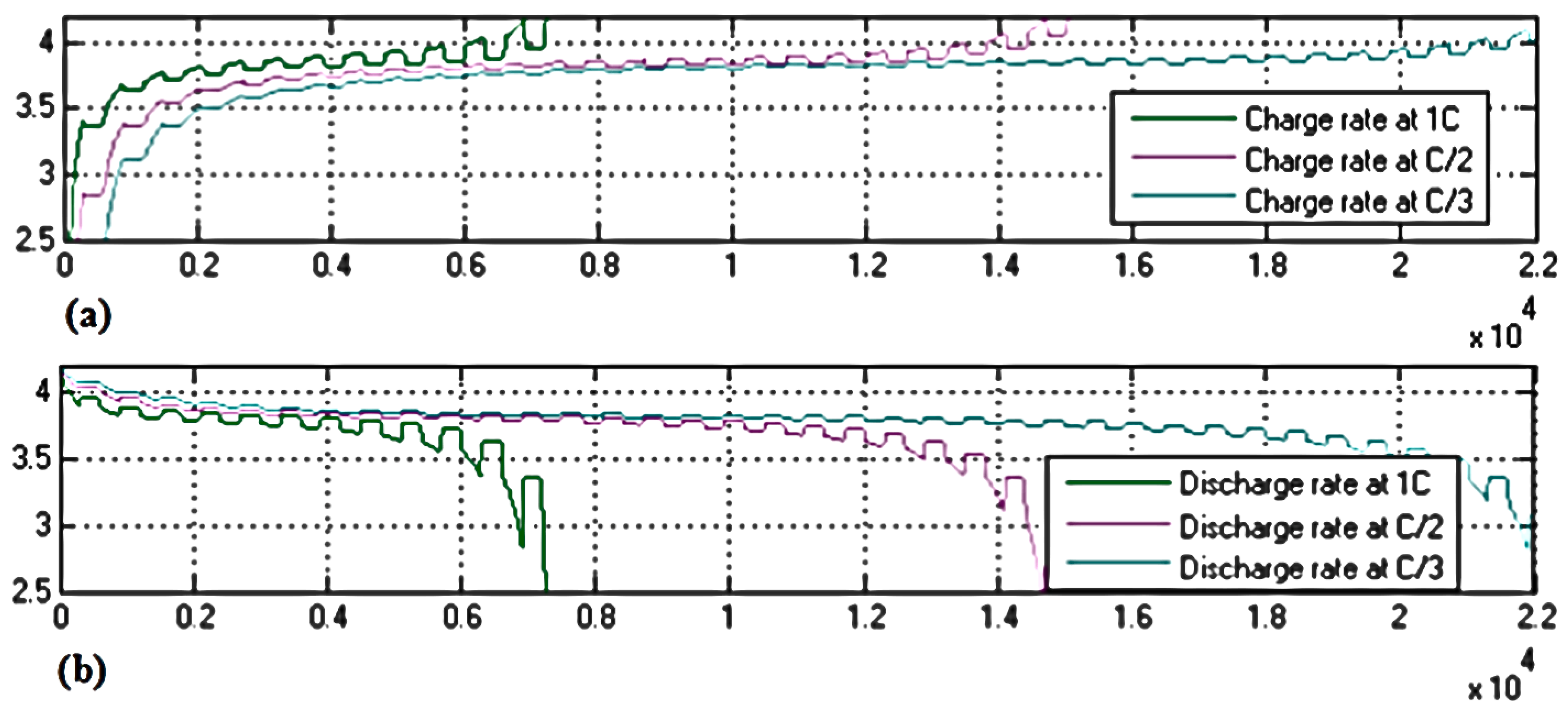
3.4. Modeling of Charging and Discharging of Li-Ion Battery
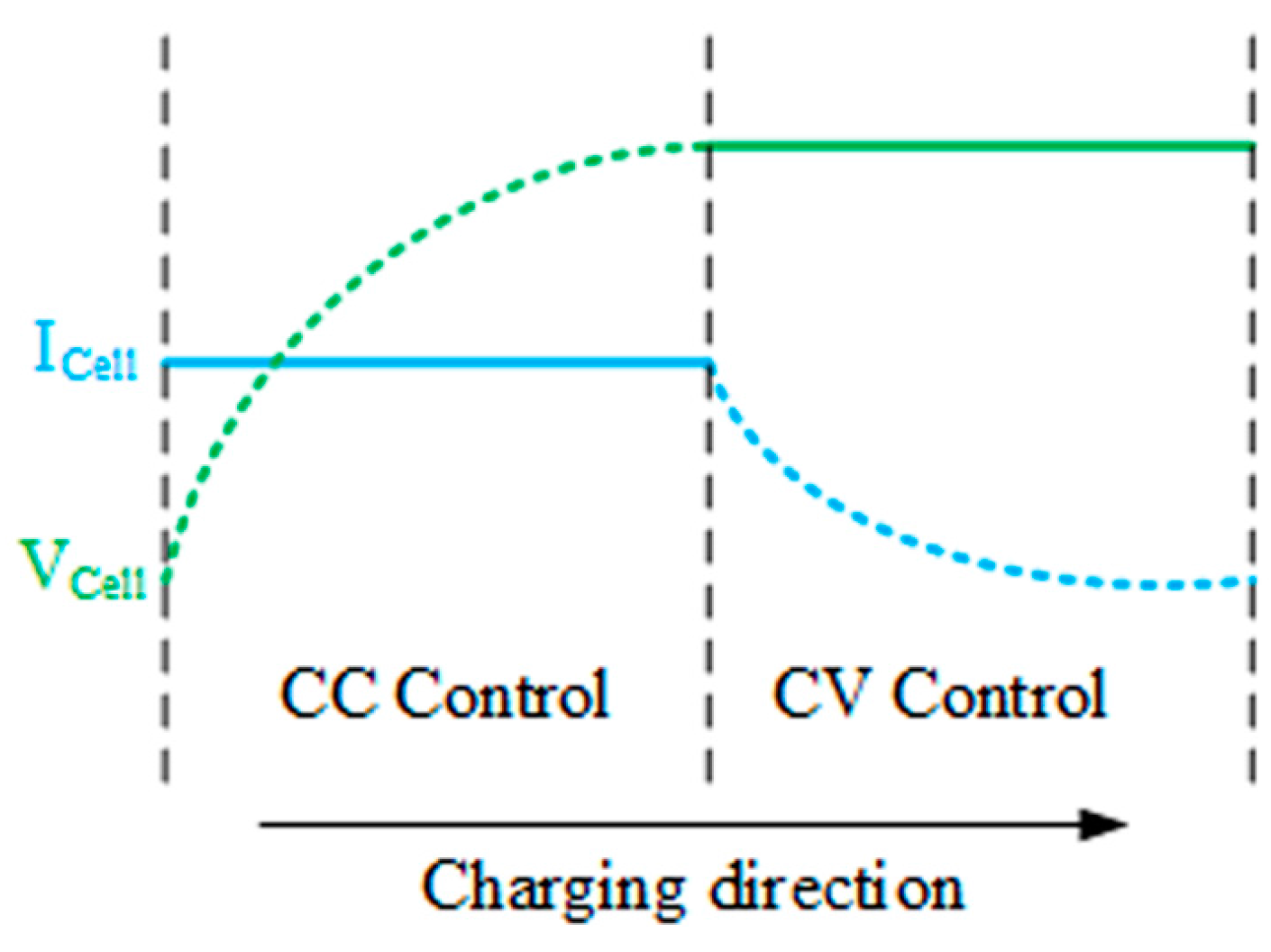
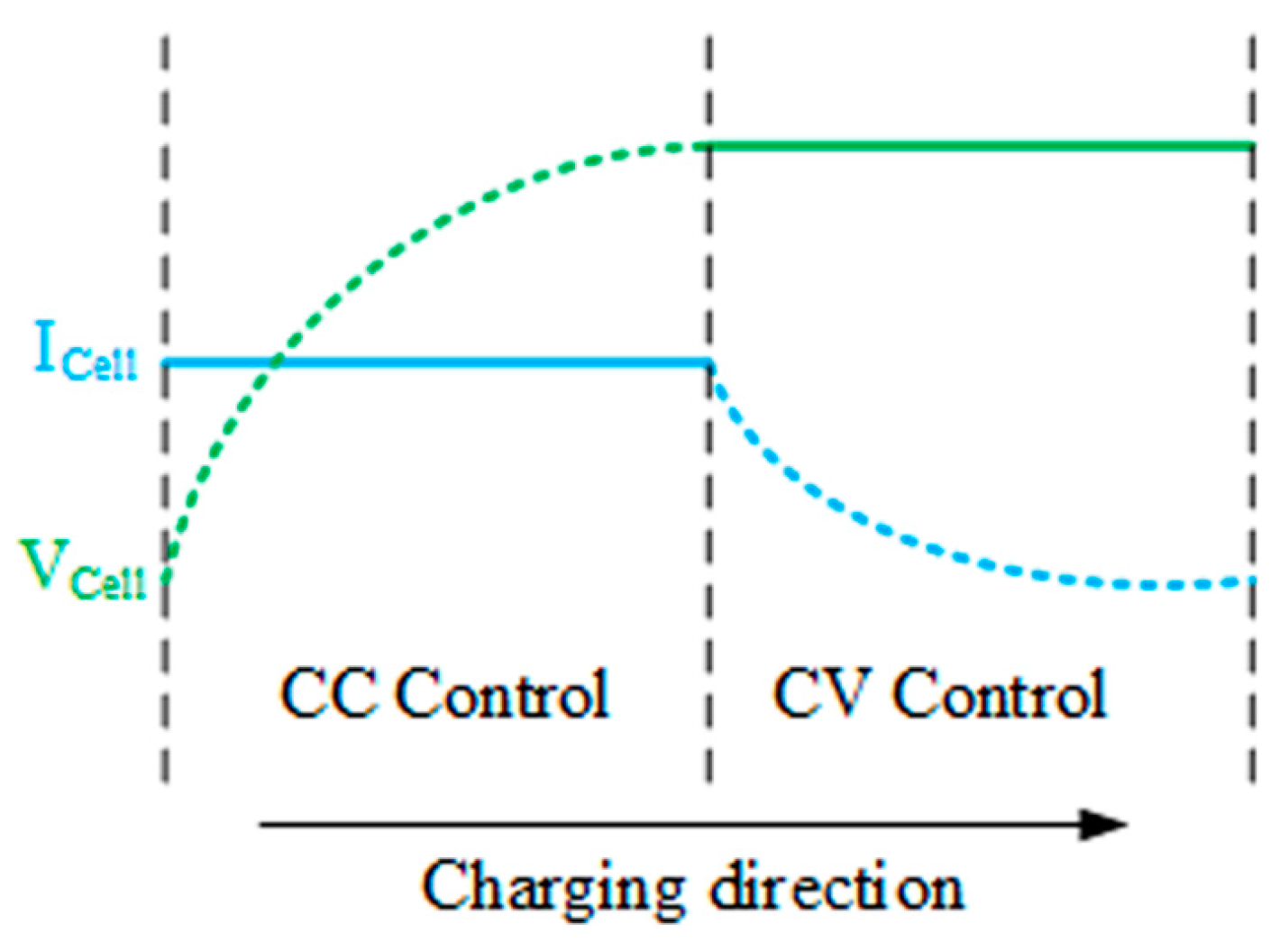
3.4.1. Constant Current–Constant Voltage Control for Charging
3.4.2. Discontinuous Current Mode Control for Discharging
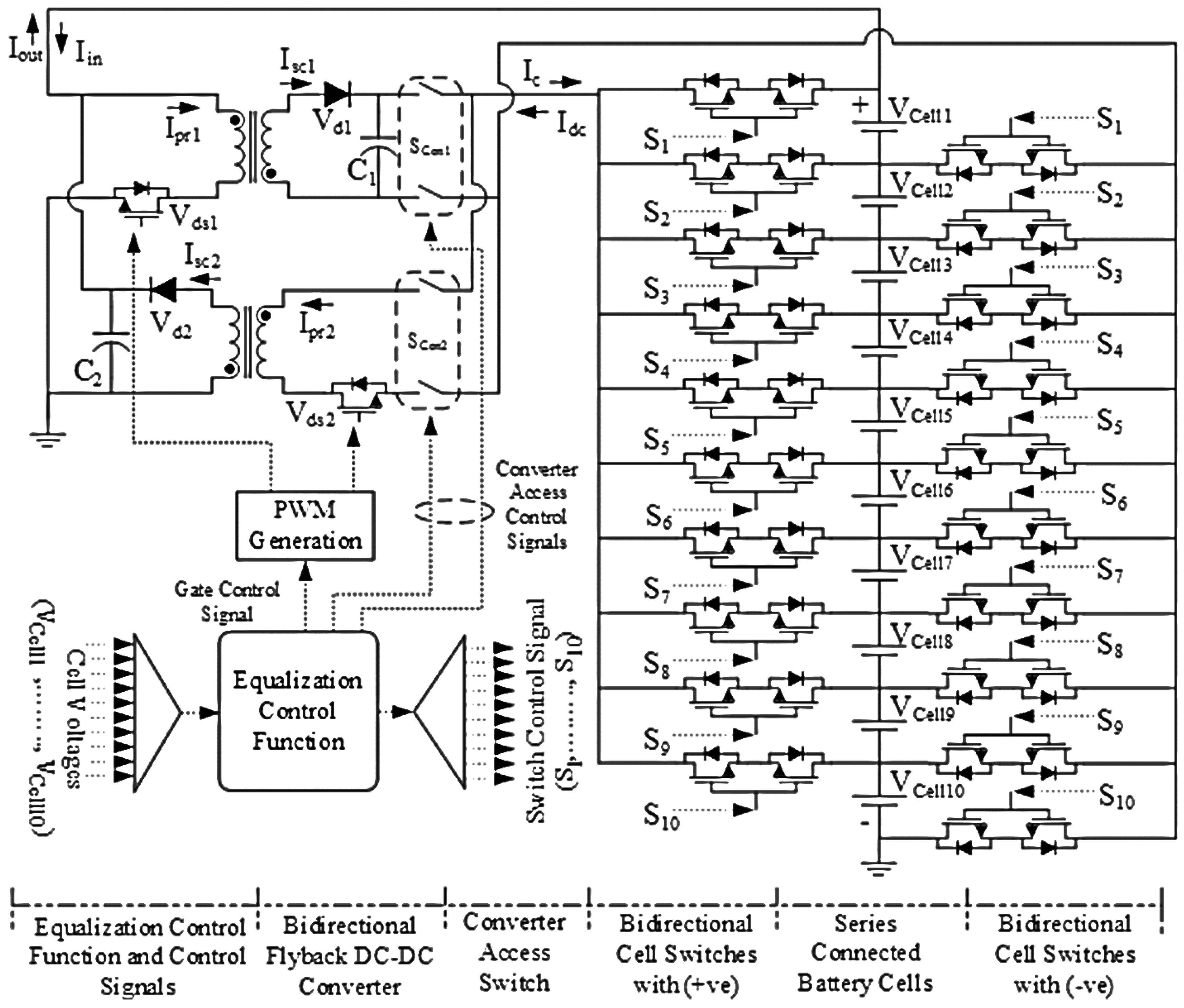
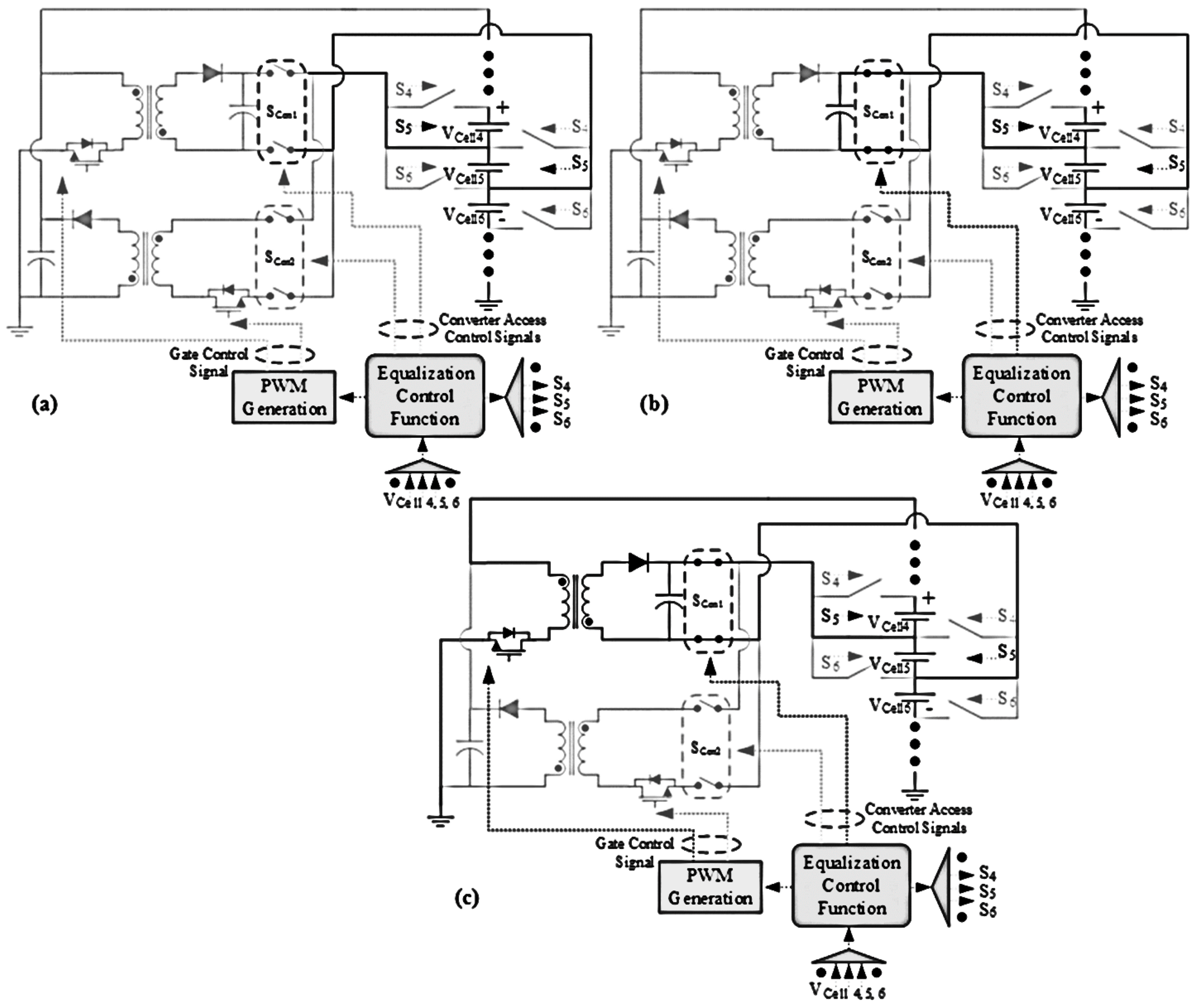
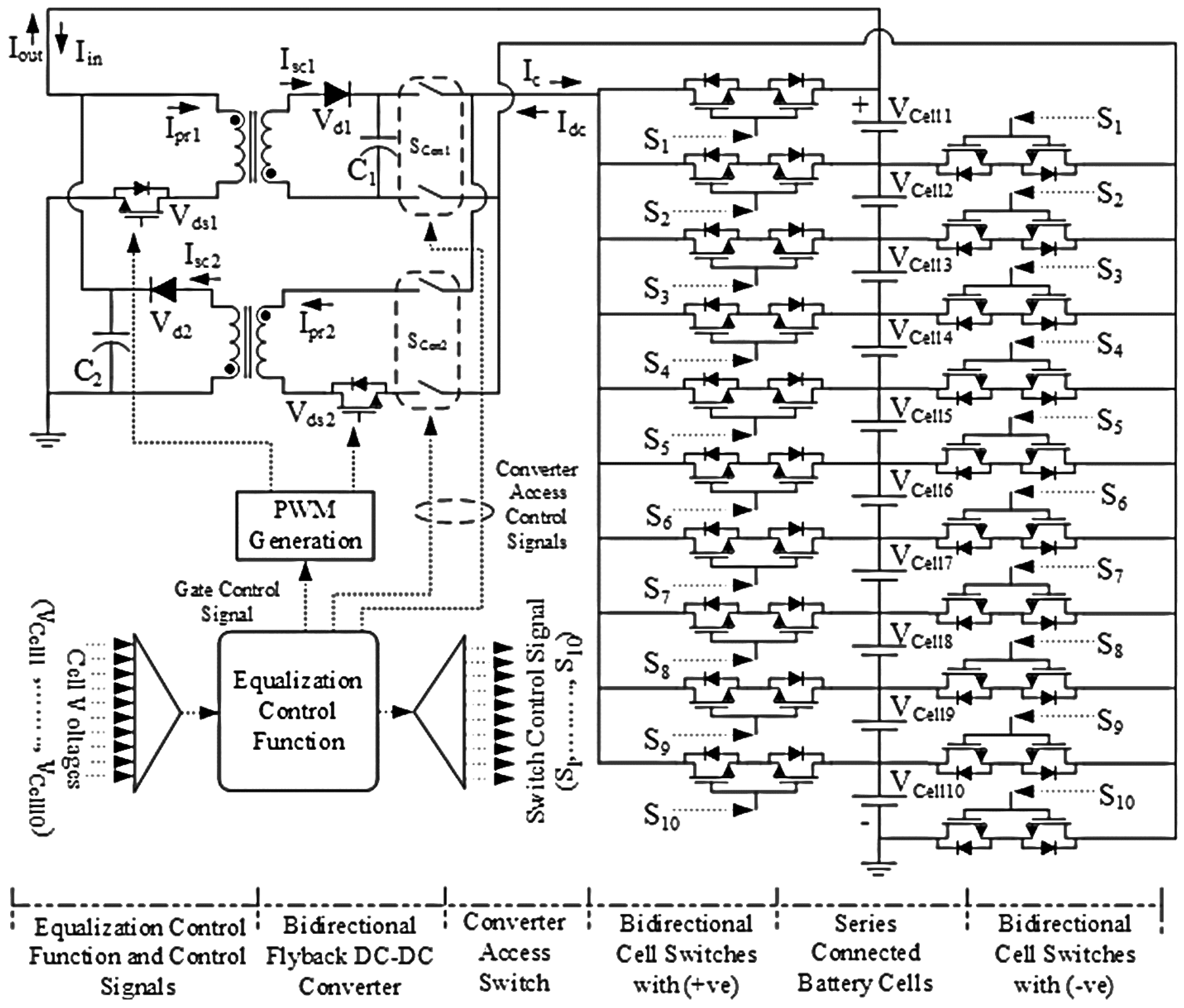
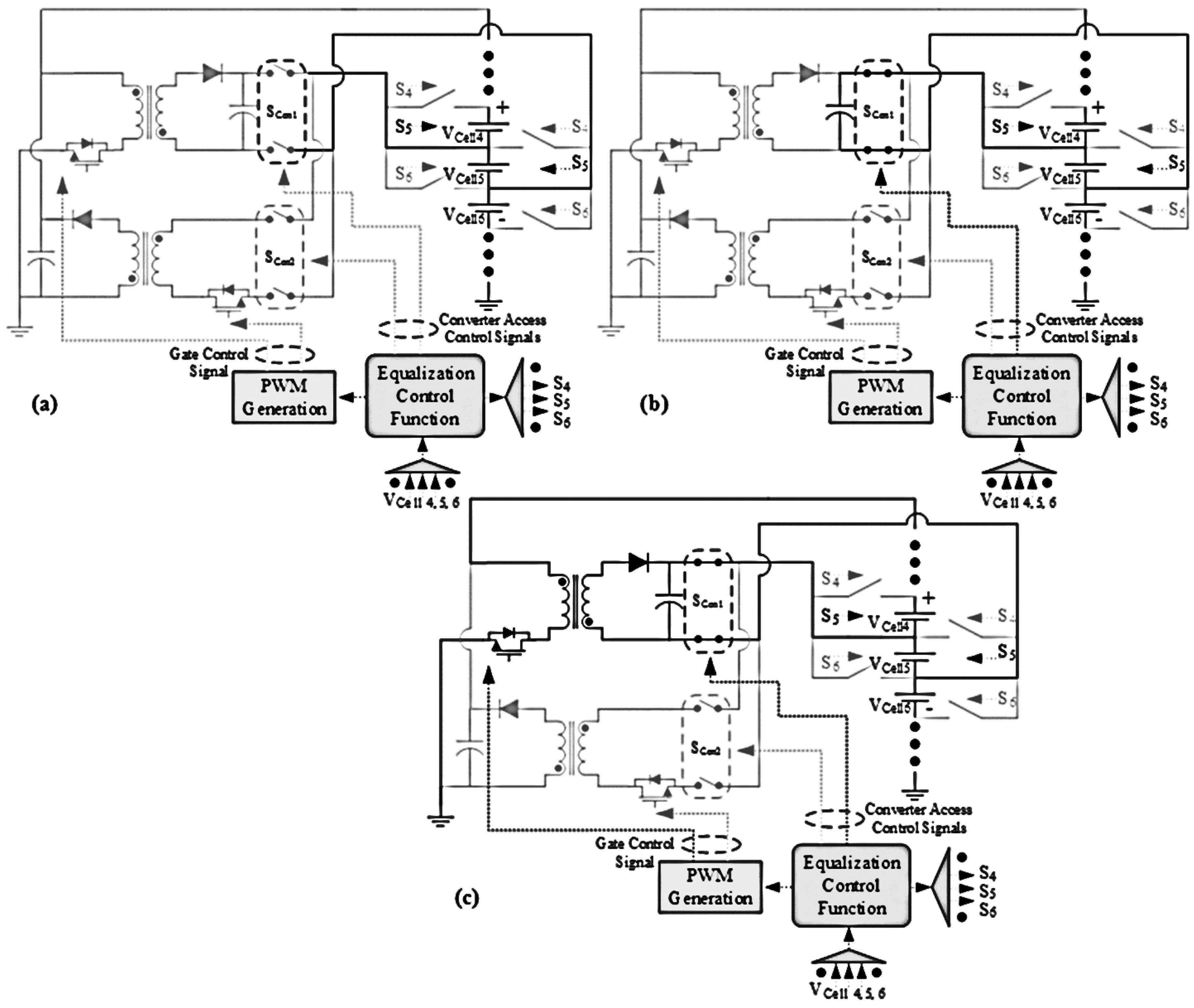
3.5. Modeling of Charge Equalization Controller Circuit
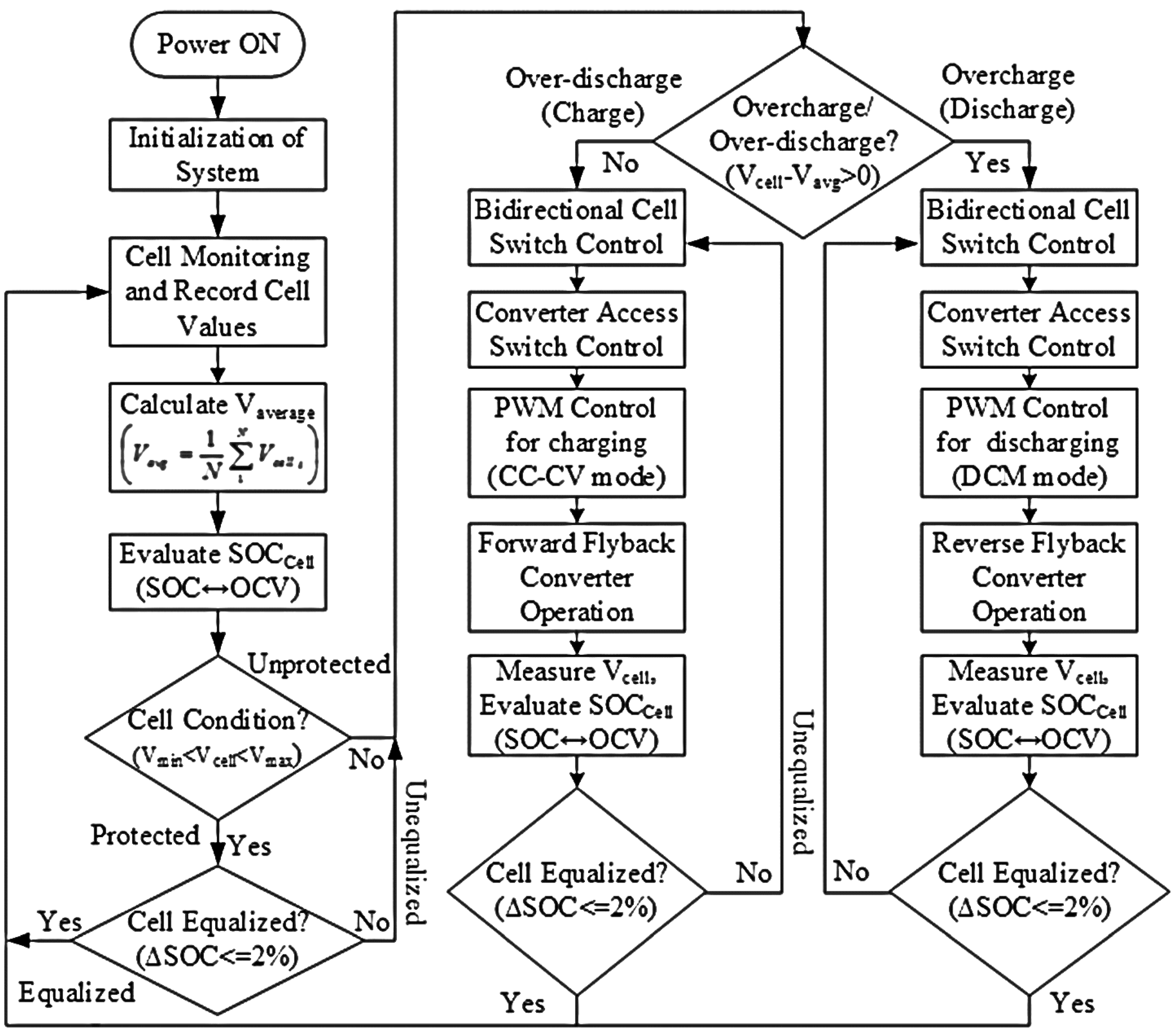
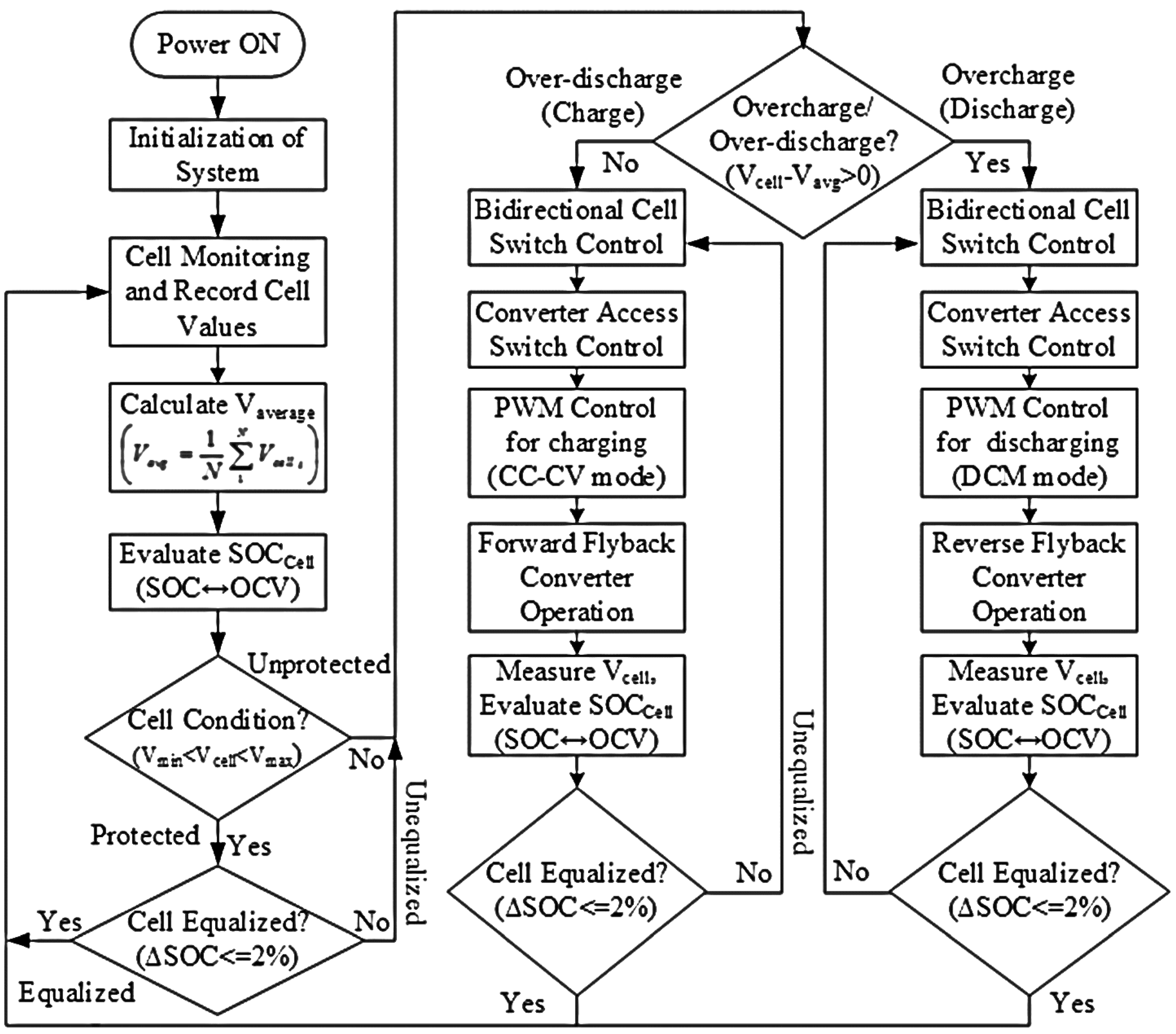
4. Charge Equalization Controller Algorithm
5. Results and Discussion
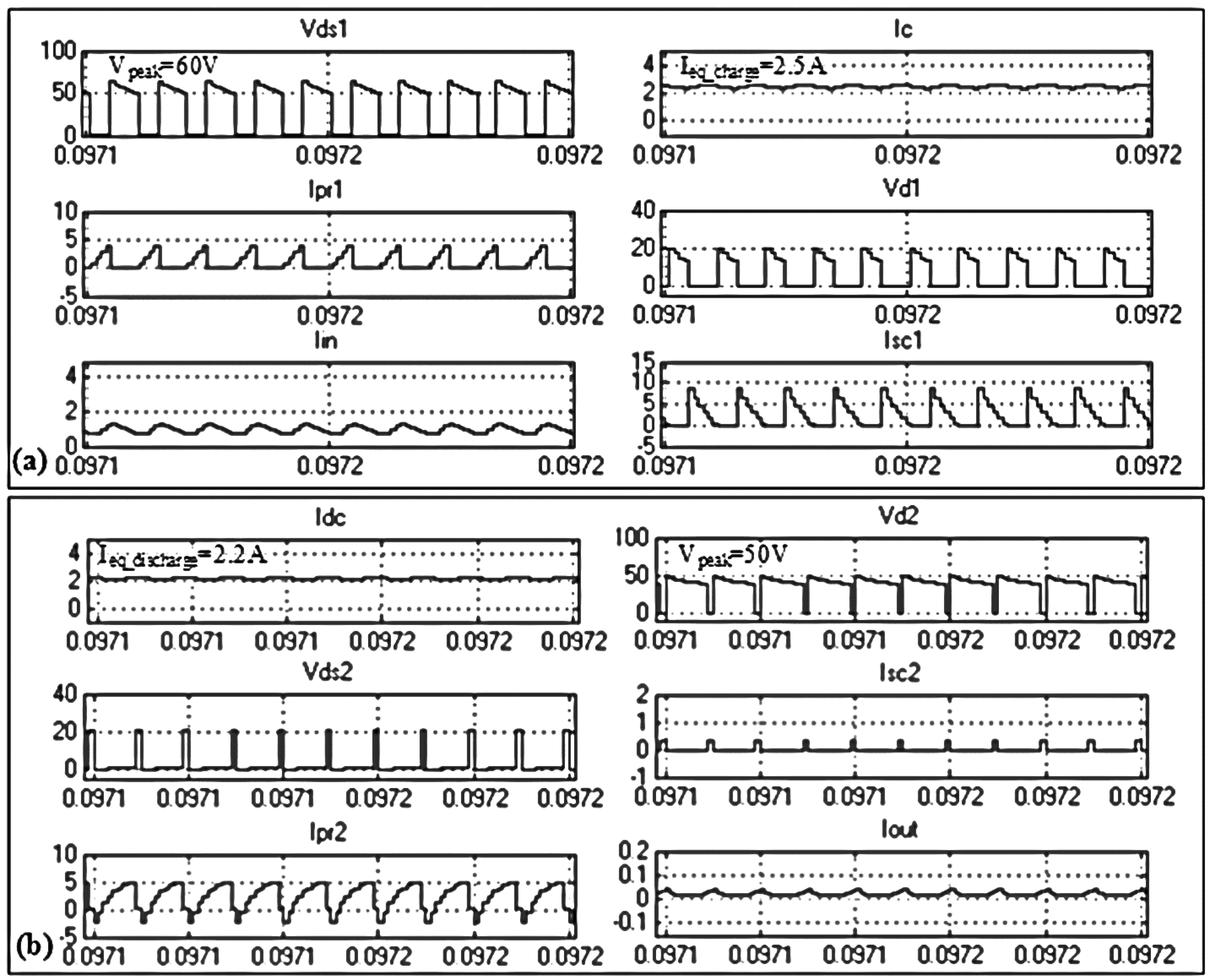
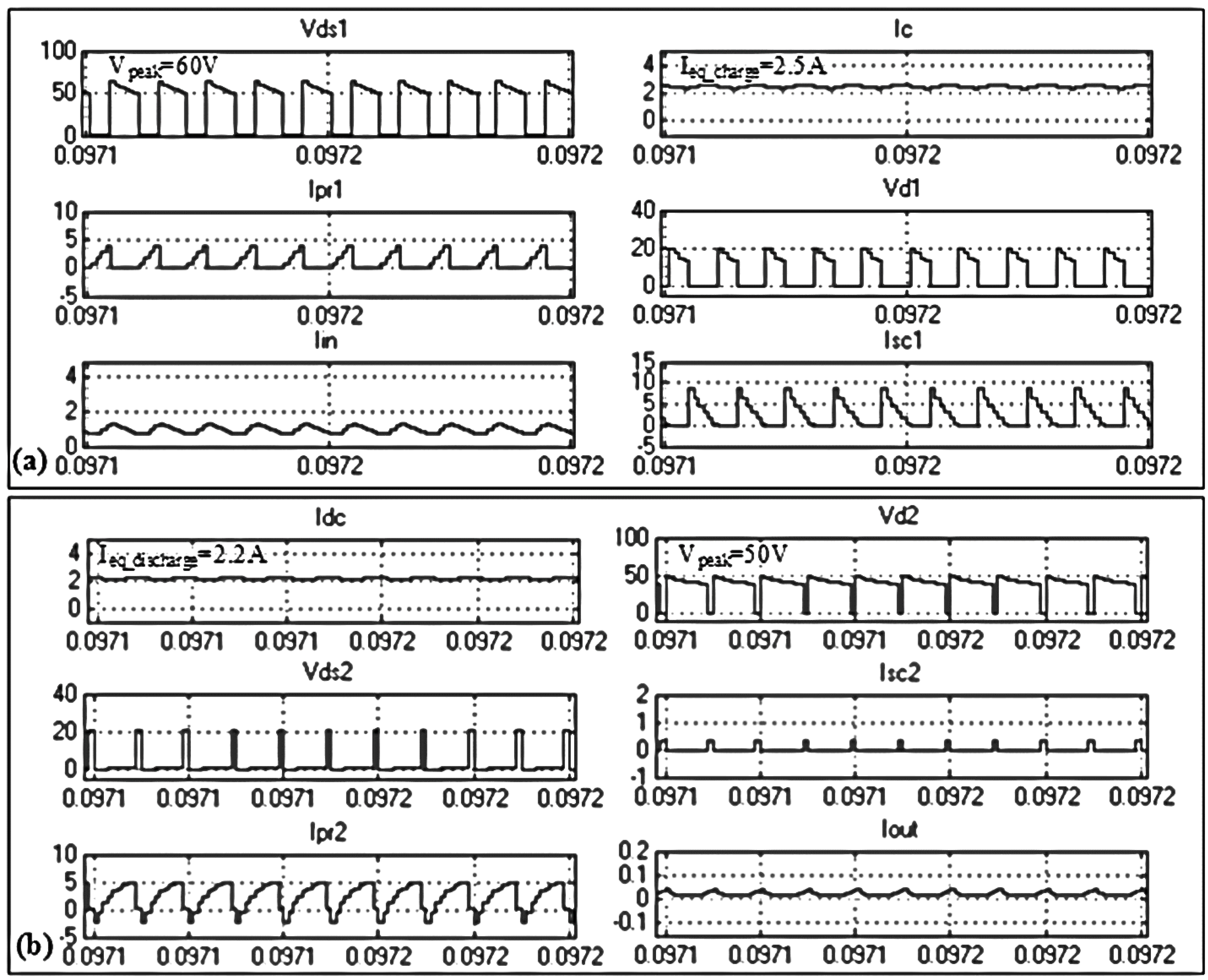
5.1. Bidirectional Flyback DC–DC Converter Output
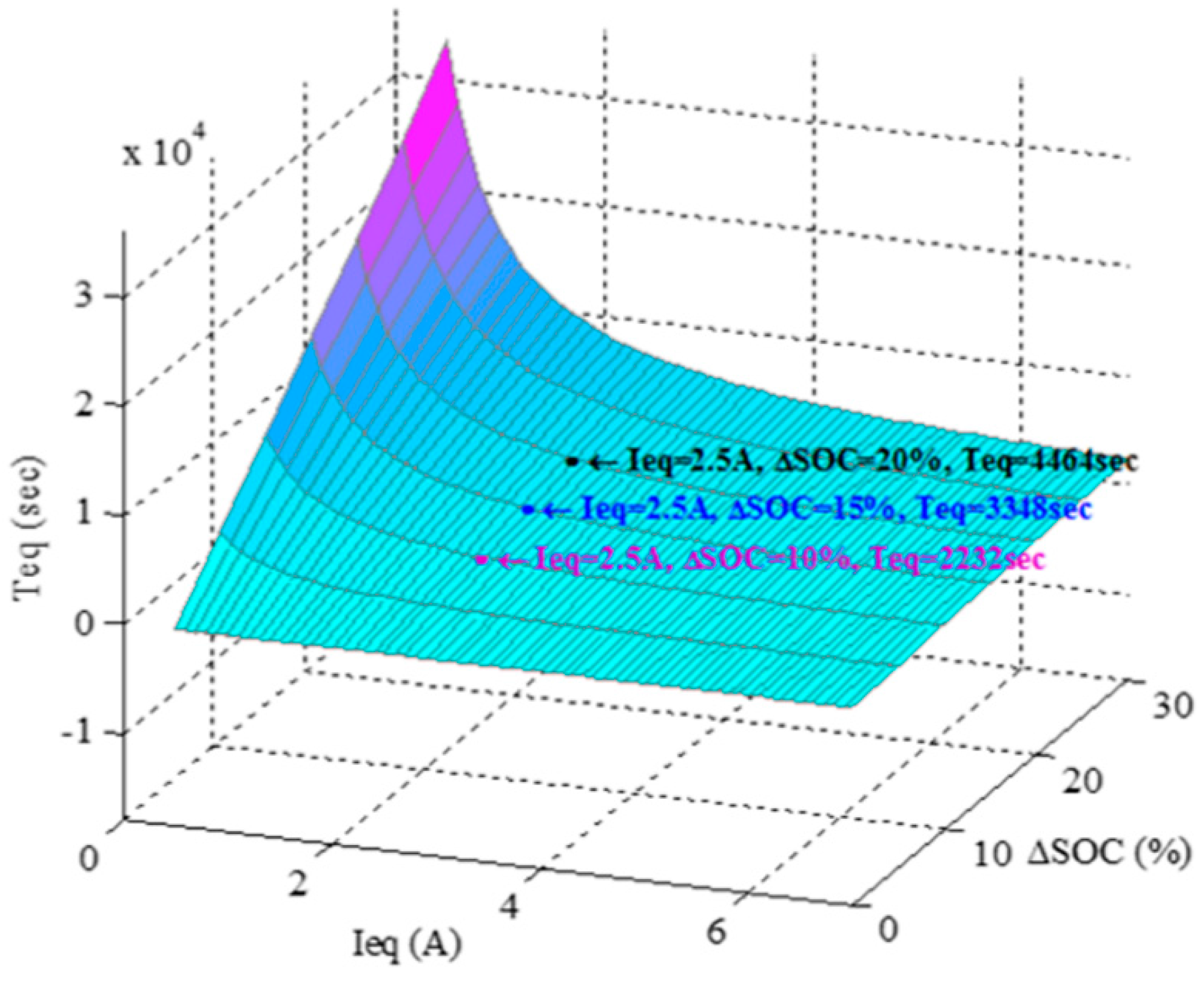
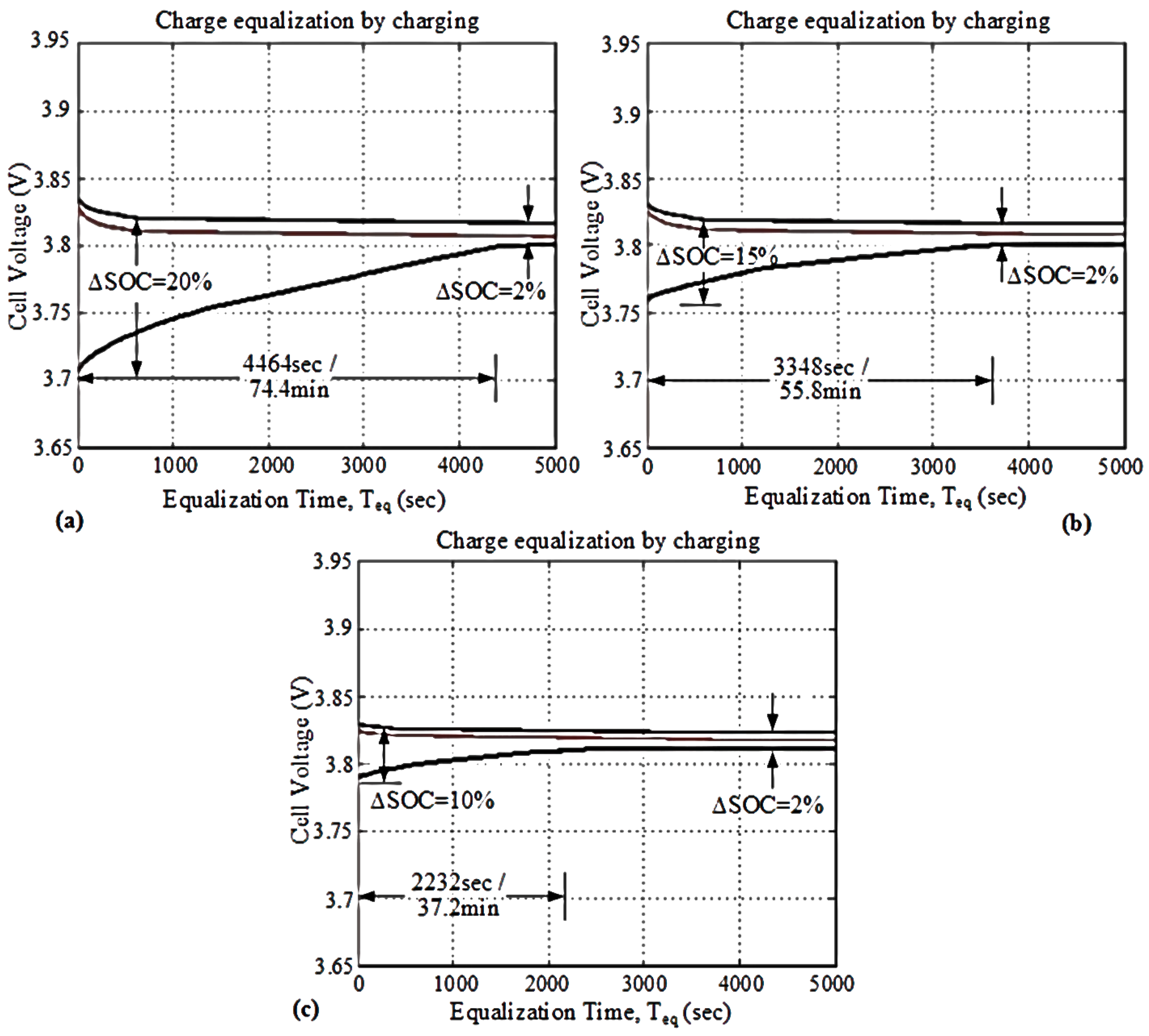
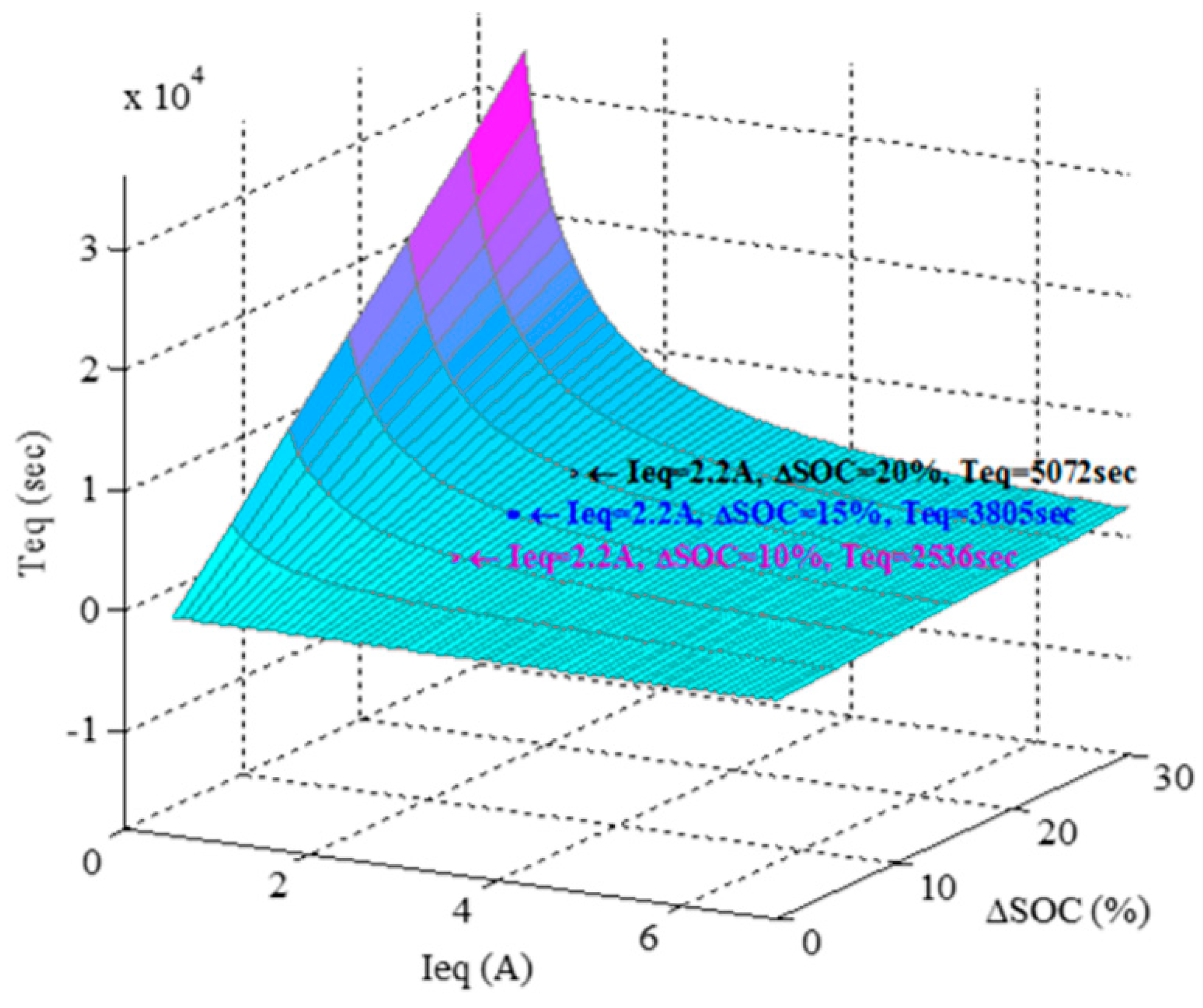
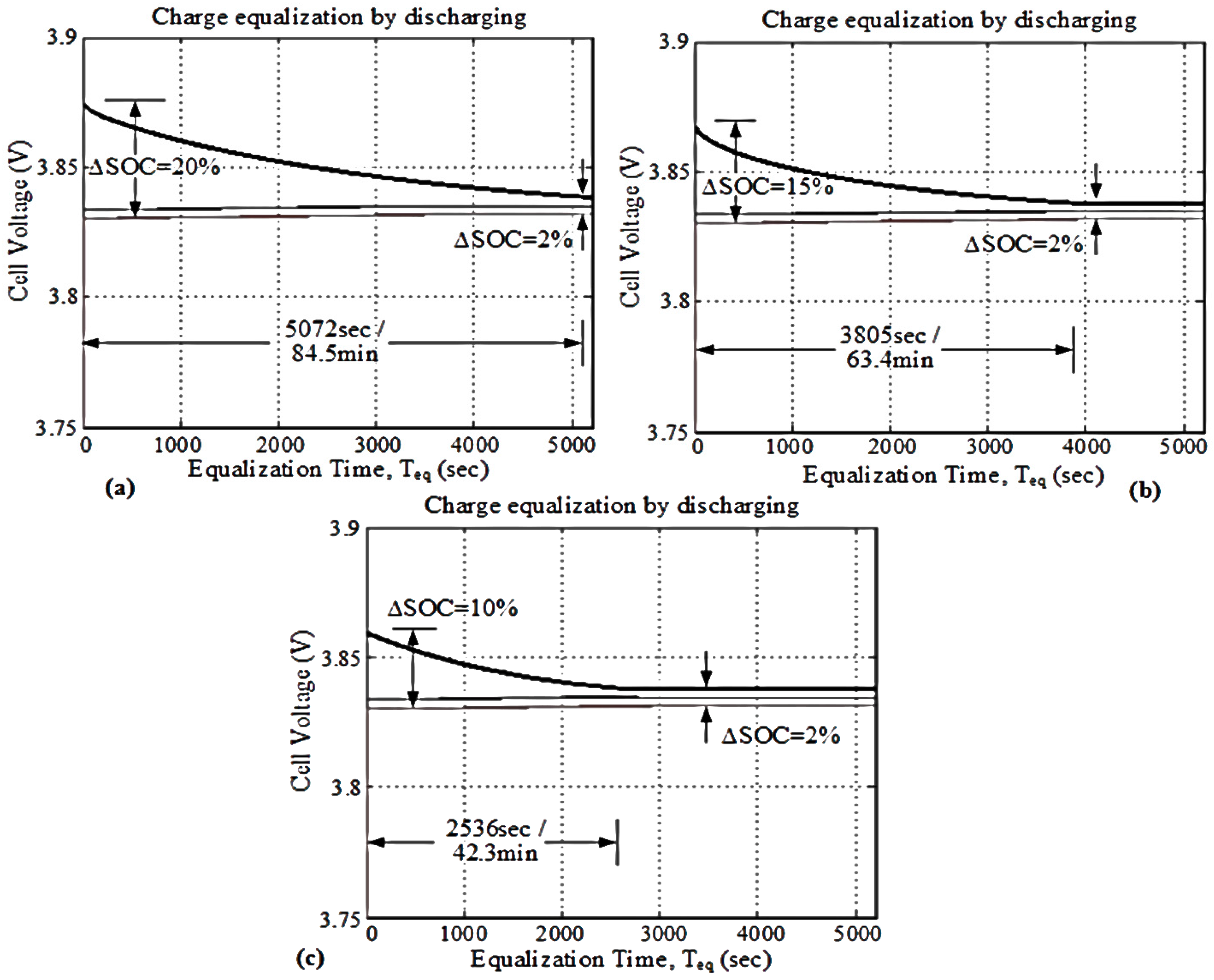
5.2. Equalization Output
5.3. Performance Comparison of the Proposed Charge Equalization Controller Model
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hu, X.; Jiang, J.; Egardt, B.; Cao, D. Advanced Power-Source Integration in Hybrid Electric Vehicles: Multicriteria Optimization Approach. IEEE Trans. Ind. Electron. 2015, 62, 7847–7858. [Google Scholar] [CrossRef]
- Hannan, M.A.; Hoque, M.M.; Mohamed, A.; Ayob, A. Review of energy storage systems for electric vehicle applications: Issues and challenges. Renew. Sustain. Energy Rev. 2017, 69, 771–789. [Google Scholar] [CrossRef]
- Hu, X.; Murgovski, N.; Johannesson, L.M.; Egardt, B. Optimal Dimensioning and Power Management of a Fuel Cell/Battery Hybrid Bus via Convex Programming. IEEE/ASME Trans. Mechatron. 2015, 20, 457–468. [Google Scholar] [CrossRef]
- Hannan, M.A.; Hoque, M.H.; Peng, S.E.; Uddin, M.N. Lithium Ion Battery Charge Equalization Algorithm for Electrical Vehicle Applications. IEEE Trans. Ind. Appl. 2017, 53, 2541–2549. [Google Scholar] [CrossRef]
- Hoque, M.M.; Hannan, M.A.; Mohamed, A.; Ayob, A. Battery Charge Equalization Controller in Electric Vehicle Applications: A review. Renew. Sustain. Energy Rev. 2017, 75, 1363–1385. [Google Scholar] [CrossRef]
- Song, Z.; Hofmann, H.; Li, J.; Hou, J.; Han, X.; Ouyang, M. Energy Management Strategies Comparison for Electric Vehicles with Hybrid Energy Storage System. Appl. Energy. 2014, 134, 321–331. [Google Scholar] [CrossRef]
- Zou, Y.; Hu, X.; Ma, H.; Li, S.E. Combined State of Charge and State of Health Estimation over Lithium-Ion Battery Cell Cycle Lifespan for Electric Vehicles. J. Power Sources 2015, 273, 793–803. [Google Scholar] [CrossRef]
- Schuster, S.F.; Brand, M.J.; Berg, P.; Gleissenberger, M.; Jossen, A. Lithium-ion Cell-to-Cell Variation during Battery Electric Vehicle Operation. J. Power Sources 2015, 30, 242–251. [Google Scholar] [CrossRef]
- Hoque, M.M.; Hannan, M.A.; Mohamed, A. Optimal Algorithms for Charge Equalization Controller of Series Connected Lithium-Ion Battery Cells in Electric Vehicle Applications. IET Electr. Syst. Trans. 2017. [Google Scholar] [CrossRef]
- Hu, X.; Murgovski, N.; Johannesson, L.M.; Egardt, B. Comparison of Three Electrochemical Energy Buffers Applied to a Hybrid Bus Powertrain with Simultaneous Optimal Sizing and Energy Management. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1193–1205. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, C.; Chen, Z. An Adaptive Remaining Energy Prediction Approach for Lithium-Ion Batteries in Electric Vehicles. J. Power Sources 2016, 305, 80–88. [Google Scholar] [CrossRef]
- Hoque, M.M.; Hannan, M.A.; Mohamed, A. Voltage Equalization Control Algorithm for Monitoring and Balancing of Series Connected Lithium-Ion Battery. J. Renew. Sustain. Energy 2016, 8, 1–15. [Google Scholar] [CrossRef]
- Javier, G.-L.; Enrique, R.-C.; Milanes-Montero, M.I.; Guerrero-Martinez, M.A. Battery Equalization Active Methods: Review Article. J. Power Sources 2014, 246, 934–949. [Google Scholar]
- Baronti, F.; Roncella, R.; Saletti, R. Performance Comparison of Active Balancing Techniques for Lithium-Ion Batteries. J. Power Sources 2014, 267, 603–609. [Google Scholar] [CrossRef]
- Kim, C.-H.; Kim, M.-Y.; Moon, G.-W. A Modularized Charge Equalizer Using a Battery Monitoring IC for Series-Connected Li-Ion Battery Strings in Electric Vehicles. IEEE Trans. Power Electron. 2013, 28, 3779–3787. [Google Scholar] [CrossRef]
- Shang, Y.; Zhang, Q.; Cui, N.; Zhang, C. A Cell-to-Cell Equalizer Based on Three-Resonant-State Switched-Capacitor Converters for Series-Connected Battery Strings. Energies 2017, 10, 206. [Google Scholar] [CrossRef]
- Kim, M.-Y.; Kim, C.-H.; Kim, J.-H.; Moon, G.-W. A Chain Structure of Switched Capacitor for Improved Cell Balancing Speed of Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2014, 61, 3989–3999. [Google Scholar] [CrossRef]
- Li, S.; Mi, C.; Zhang, M. A High-Efficiency Active Battery-Balancing Circuit Using Multiwinding Transformer. IEEE Trans. Ind. Appl. 2013, 49, 198–207. [Google Scholar] [CrossRef]
- Lambert, S.M.; Pickert, V.; Atkinson, D.J.; Zhan, H. Transformer-Based Equalization Circuit Applied to n-Number of High Capacitance Cells. IEEE Trans. Power Electron. 2016, 31, 1334–1343. [Google Scholar] [CrossRef]
- Uno, M.; Kukita, A. Single-Switch Single-Transformer Cell Voltage Equalizer Based on Forward–Flyback Resonant Inverter and Voltage Multiplier for Series-Connected Energy Storage Cells. IEEE Trans. Veh. Technol. 2014, 63, 4232–4247. [Google Scholar] [CrossRef]
- Uno, M.; Kukita, A. Bidirectional PWM Converter Integrating Cell Voltage Equalizer Using Series-Resonant Voltage Multiplier for Series-Connected Energy Storage Cells. IEEE Trans. Power Electron. 2015, 30, 3077–3090. [Google Scholar] [CrossRef]
- Lee, I.O. Hybrid PWM-Resonant Converter for Electric Vehicle On-Board Battery Chargers. IEEE Trans. Power Electron. 2016, 31, 3639–3649. [Google Scholar] [CrossRef]
- Lee, K.-M.; Chung, Y.-C.; Sung, C.-H.; Kang, B. Active Cell Balancing of Li-Ion Batteries Using LC Series Resonant Circuit. IEEE Trans. Ind. Electron. 2015, 62, 5491–5501. [Google Scholar] [CrossRef]
- Tang, M.; Stuart, T. Selective Buck-Boost Equalizer for Series Battery Packs. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 201–211. [Google Scholar] [CrossRef]
- Lee, Y.-S.; Cheng, M.-W. Intelligent Control Battery Equalization for Series Connected Lithium-Ion Battery Strings. IEEE Trans. Ind. Electron. 2015, 52, 1297–1307. [Google Scholar] [CrossRef]
- Hoque, M.M.; Hannan, M.A.; Mohamed, A. Charging and Discharging Model of Lithium-Ion Battery for Charge Equalization Control Using Particle Swarm Optimization Algorithm. J. Renew. Sustain. Energy 2016, 8, 065701. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.S.H.; Hussain, A.; Mohamed, A. A Review of Lithium-Ion Battery State of Charge Estimation and Management System in Electric Vehicle Applications: Challenges and Recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Zhou, F.; Xiao, F.; Chang, C.; Shao, Y.; Song, C. Adaptive Model Predictive Control-Based Energy Management for Semi-Active Hybrid Energy Storage Systems on Electric Vehicles. Energies 2017, 10, 1063. [Google Scholar] [CrossRef]
- Hoque, M.M.; Hannan, M.A.; Mohamed, A. Model Development of Charge Equalization Controller for Lithium-Ion Battery. Adv. Sci. Lett. 2017, 23, 5255–5259. [Google Scholar] [CrossRef]
- Wijewardana, S.; Vepa, R.; Shaheed, M.H. Dynamic Battery Cell Model and State of Charge Estimation. J. Power Sources 2016, 308, 109–120. [Google Scholar] [CrossRef]
- Du, J.; Liu, Z.; Wang, Y.; Wen, C. An Adaptive Sliding Mode Observer for Lithium-Ion Battery state of Charge and State of Health Estimation in Electric Vehicles. Control Eng. Pract. 2016, 54, 81–90. [Google Scholar] [CrossRef]
- Wang, D.; Yang, F.; Tsui, K.-L.; Zhou, Q.; Bae, S.J. Remaining Useful Life Prediction of Lithium-Ion Batteries Based on Spherical Cubature Particle Filter. IEEE Trans. Instrum. Meas. 2016, 65, 1282–1291. [Google Scholar] [CrossRef]
- Rahman, M.A.; Anwar, S.; Izadian, A. Electrochemical Model Parameter Identification of a Lithium-Ion Battery Using Particle Swarm Optimization Method. J. Power Sources 2016, 307, 86–97. [Google Scholar] [CrossRef]
- Liu, H.; Wu, W. Strong Tracking Spherical Simplex-Radial Cubature Kalman Filter for Maneuvering Target Tracking. Sensors 2017, 17, 741. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Wang, Y.; Zhang, X.; Chen, Z. A novel State of Health Estimation Method of Li-Ion Battery Using Group Method of Data Handling. J. Power Sources 2016, 327, 457–464. [Google Scholar] [CrossRef]
- Wang, D.; Miao, Q.; Pecht, M. Prognostics of Lithium-Ion Batteries based on Relevance Vectors and a Conditional Three-Parameter Capacity Degradation Model. J. Power Sources 2013, 239, 253–264. [Google Scholar] [CrossRef]
- Wang, D.; Yang, F.; Zhao, Y.; Tsui, K.-L. Prognostics of Lithium-Ion Batteries Based on State Space Modeling with Heterogeneous Noise Variances. Microelectron. Reliab. 2017, 75, 1–8. [Google Scholar] [CrossRef]
- Chen, Z.; Li, X.; Shen, J.; Yan, W.; Xiao, R. A Novel State of Charge Estimation Algorithm for Lithium-Ion Battery Packs of Electric Vehicles. Energies 2016, 9, 710. [Google Scholar] [CrossRef]
- Li, X.; Shu, X.; Shen, J.; Xiao, R.; Yan, W.; Chen, Z. An On-Board Remaining Useful Life Estimation Algorithm for Lithium-Ion Batteries of Electric Vehicles. Energies 2017, 10, 691. [Google Scholar]
- Wu, T.-H.; Moo, C.-S. State-of-Charge Estimation with State-of-Health Calibration for Lithium-Ion Batteries. Energies 2017, 10, 987. [Google Scholar]
- Kazimierczuk, M.K. Pulse-Width Modulated DC–DC Power Converters, 1st ed.; John Wiley & Sons Ltd. Publication: West Sussex, UK, 2008. [Google Scholar]
- Chao, P.C.-P.; Chen, W.-D.; Wu, R.-H. A Battery Charge Controller Realized by a Flyback Converter with Digital Primary Side Regulation for Mobile Phones. Microsyst. Technol. 2014, 20, 1689–1703. [Google Scholar] [CrossRef]
- Valipour, M. Optimization of Neural Networks for Precipitation Analysis in a Humid Region to Detect Drought and Wet Year Alarms. Meteorol. Appl. 2016, 23, 91–100. [Google Scholar] [CrossRef]
- Valipour, M.; Sefidkouhi, M.A.G.; Eslamian, S. Surface Irrigation Simulation Models: A Review. Int. J. Hydrol. Sci. Technol. 2015, 5, 51–70. [Google Scholar] [CrossRef]
- Khasraghi, M.M.; Sefidkouhi, M.A.G.; Valipour, M. Simulation of Open- and Closed-End Border Irrigation Systems Using SIRMOD. Arch. Agron. Soil Sci. 2015, 61, 929–941. [Google Scholar] [CrossRef]
- Tsang, K.M.; Chan, W.L. A Simple and Low-Cost Charger for Lithium-Ion Batteries. J. Power Sources 2009, 191, 633–635. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Parameter | Value | Unit |
|---|---|---|---|
| Converter Model Parameters | Input power, Pin | 10 | Watts |
| Frequency, f | 100 × 103 | Hz | |
| Sampling time, Ts | 1 × 10−6 | Sec | |
| Forward flyback DC–DC converter | Turns ratio, N1:N2 | 80:35 | - |
| Duty cycle, Dmax | 0.5 | - | |
| Mutual inductance, Lm | 0.8 × 10−4 | H | |
| Filter capacitance, C1 | 3 × 10−6 | F | |
| Maximum switch voltage stress, VS_DS_max | 63.76 | Volts | |
| Maximum diode voltage stress, VS_D_max | 27.89 | Volts | |
| Reverse flyback DC–DC converter | Turns ratio, N1:N2 | 35:80 | - |
| Duty cycle, Dmax | 0.85 | - | |
| Mutual inductance, Lm | 0.42 × 10−5 | H | |
| Filter capacitance, C2 | 0.66 × 10−6 | F | |
| Maximum switch voltage stress, VS_DS_max | 22.70 | Volts | |
| Maximum diode voltage stress, VS_D_max | 51.88 | Volts |
| Parameters | Resistor Current Shunt [12,13,14,15] | Switched Capacitor [16,17] | Multi-Windings Transformer [18,19] | Flyback Converter [20] | Resonant Converter [21,22] | Buck-Boost Converter [23,24,25] | Proposed |
|---|---|---|---|---|---|---|---|
| Equalization type | Passive | Active | Active | Active | Active | Active | Active |
| Equalization time | Satisfactory | Satisfactory | Good | Good | Good | Excellent | Excellent |
| Execution | Excellent | Very Good | Good | Satisfactory | Satisfactory | Very Good | Excellent |
| Control | Very Simple | Medium | Medium | Complex | Complex | Complex | Complex |
| Power loss | High | Low | Low | Low | Negligible | Negligible | Negligible |
| Cost | Very Cheap | Cheap | Costly | Costly | Costly | Costly | Low-cost |
| Size | Excellent | Good | Satisfactory | Satisfactory | Satisfactory | Good | Very Good |
| Voltage/current Stress | Nil/Nil | Low/Low | High/High | Low/Low | High/Low | Low/Low | Low/Low |
| Switch (for i cells) | i | 2i | I | i | 2i − 2 | 2i − 2 | 2i + 2 |
| Transformer | 0 | 0 | I | i | 0 | 0 | 2 |
| Efficiency | Poor | Satisfactory | Good | Good | Good | Good | Very Good |
| Merits | Cheap, simple, small size | Simple control, bidirectional, low stresses | Good equalization time, bidirectional | Good equalization time, bidirectional | High efficiency | Good equalization time, easy modularized design, bidirectional | Excellent equalization time, bidirectional, easy modularized design, high power application |
| Demerits | Less efficient, Heat problem, Slow speed, Low power application | Slow Speed | Costly, Complex control, magnetizing loss | Costly, Complex control, magnetizing loss | Costly, voltage stress, difficult to implement | Costly, Complex control | Intelligent control |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hannan, M.A.; Hoque, M.M.; Ker, P.J.; Begum, R.A.; Mohamed, A. Charge Equalization Controller Algorithm for Series-Connected Lithium-Ion Battery Storage Systems: Modeling and Applications. Energies 2017, 10, 1390. https://doi.org/10.3390/en10091390
Hannan MA, Hoque MM, Ker PJ, Begum RA, Mohamed A. Charge Equalization Controller Algorithm for Series-Connected Lithium-Ion Battery Storage Systems: Modeling and Applications. Energies. 2017; 10(9):1390. https://doi.org/10.3390/en10091390
Chicago/Turabian StyleHannan, Mahammad A., Mohammad M. Hoque, Pin J. Ker, Rawshan A. Begum, and Azah Mohamed. 2017. "Charge Equalization Controller Algorithm for Series-Connected Lithium-Ion Battery Storage Systems: Modeling and Applications" Energies 10, no. 9: 1390. https://doi.org/10.3390/en10091390
APA StyleHannan, M. A., Hoque, M. M., Ker, P. J., Begum, R. A., & Mohamed, A. (2017). Charge Equalization Controller Algorithm for Series-Connected Lithium-Ion Battery Storage Systems: Modeling and Applications. Energies, 10(9), 1390. https://doi.org/10.3390/en10091390