A Personalized Rolling Optimal Charging Schedule for Plug-In Hybrid Electric Vehicle Based on Statistical Energy Demand Analysis and Heuristic Algorithm


Abstract
1. Introduction
- The research that is on the side of power providers does not consider the owners’ personalized demand on electricity energy as well as the payment for charging in a dynamic environment of electricity spot prices.
- Much research on charging schedules requires the day-ahead energy demand, which means the owners should input the next-day driving plan everyday. However, it is trivial for owners. Besides, it is difficult to ensure the accuracy of plan.
- Heuristic algorithms are independent of problems. After encoding operation (e.g., binary encoding, matrix encoding, etc.), the run of the algorithm is independent to the problem. The final results can be obtained by decoding operation. Hence, the design of algorithms and the proposal of problems are separable, which provides a favourable compatibility for an algorithm’s application.
- For heuristic algorithms, they do not need much mathematical information. Compared with several traditional mathematical methods, such as programming methods, it is impossible to solve optimization problems without derivative information of objective function.
- It is more adaptive to employ heuristic algorithm to solve different kinds of optimization problems including multi-modular optimization problems, dynamic optimization problems, linear programming problems, dynamic programming problems, integer programming problems, and so forth. Hence, even if some conditions in the problems change, heuristic algorithms are still competent to address them.
2. Background and Preliminaries
2.1. A Brief of the Power Trading Market
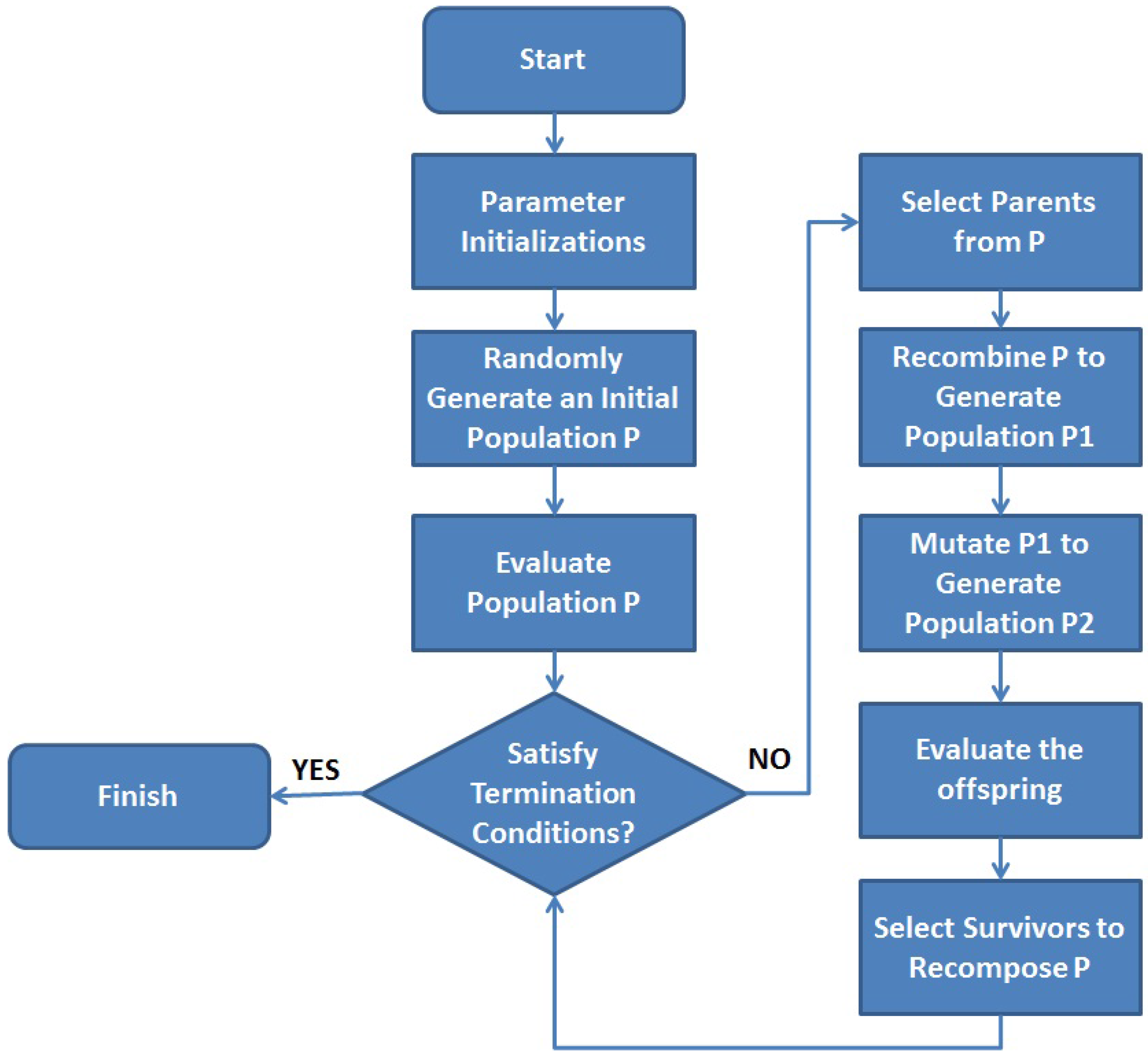
2.2. Preliminary of Heuristic Algorithm
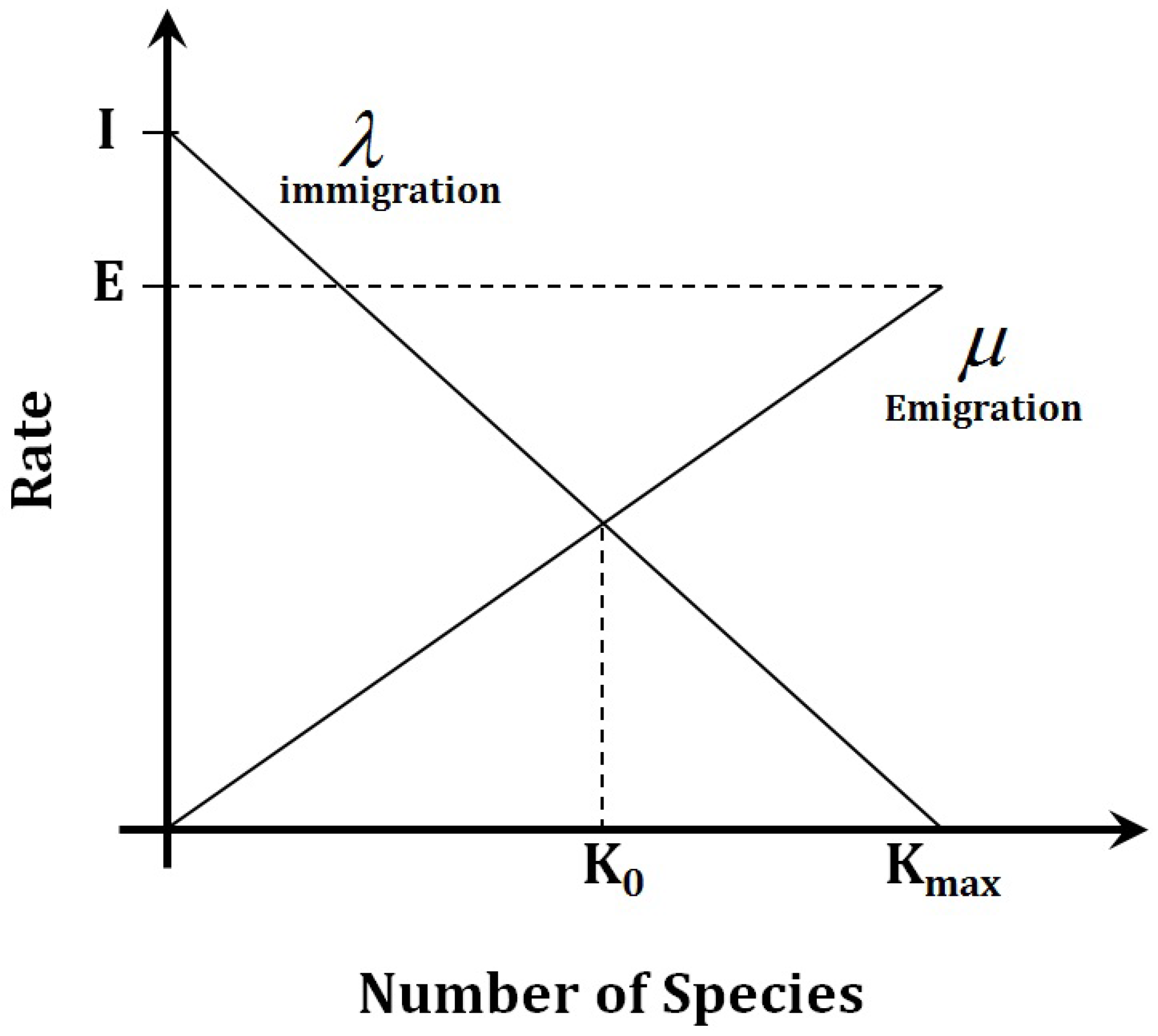
2.3. Brief of Biogeography-Based Optimization
| Algorithm 1: Pseudo-codes of Biogeography-based Optimization. |
 |
3. Design for Charging Scheme
3.1. Modeling of Energy Demand
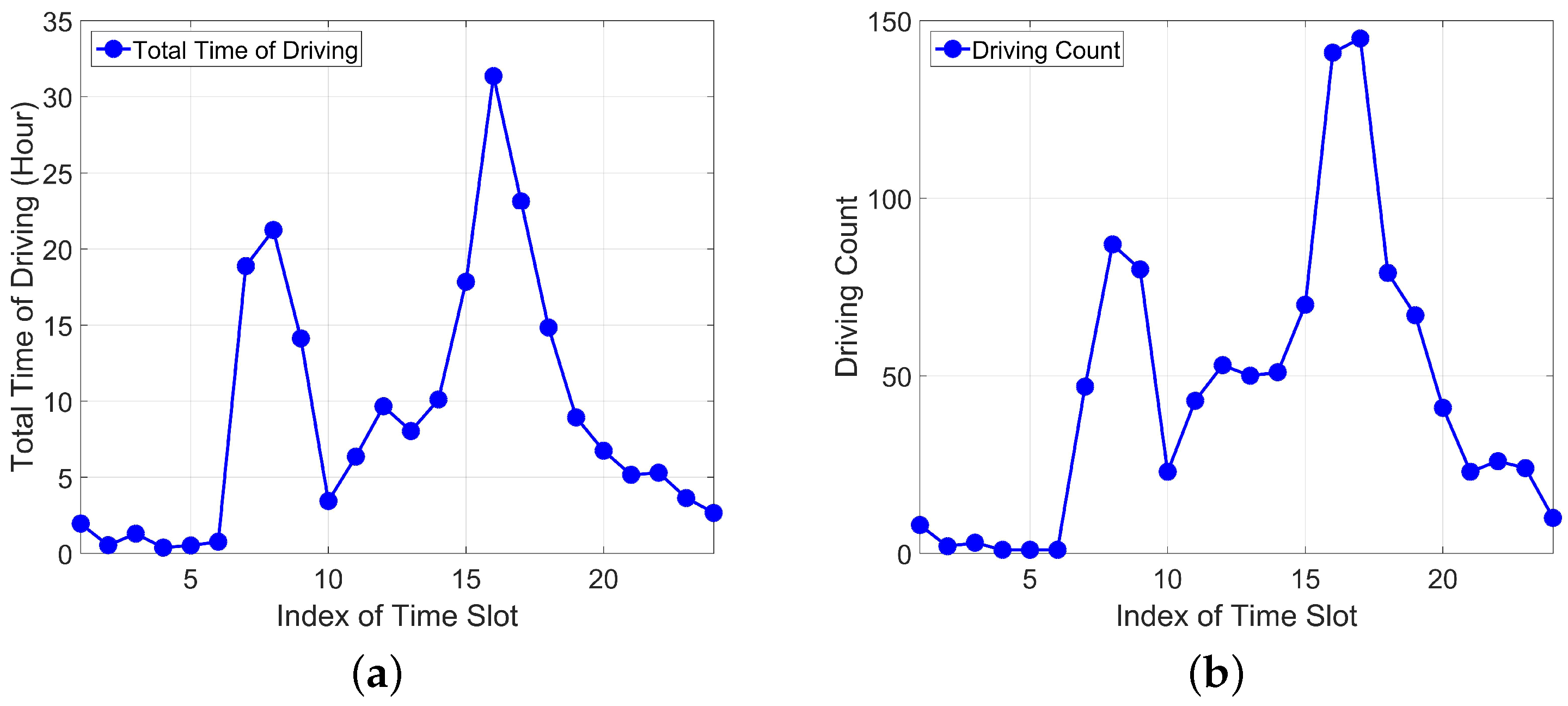
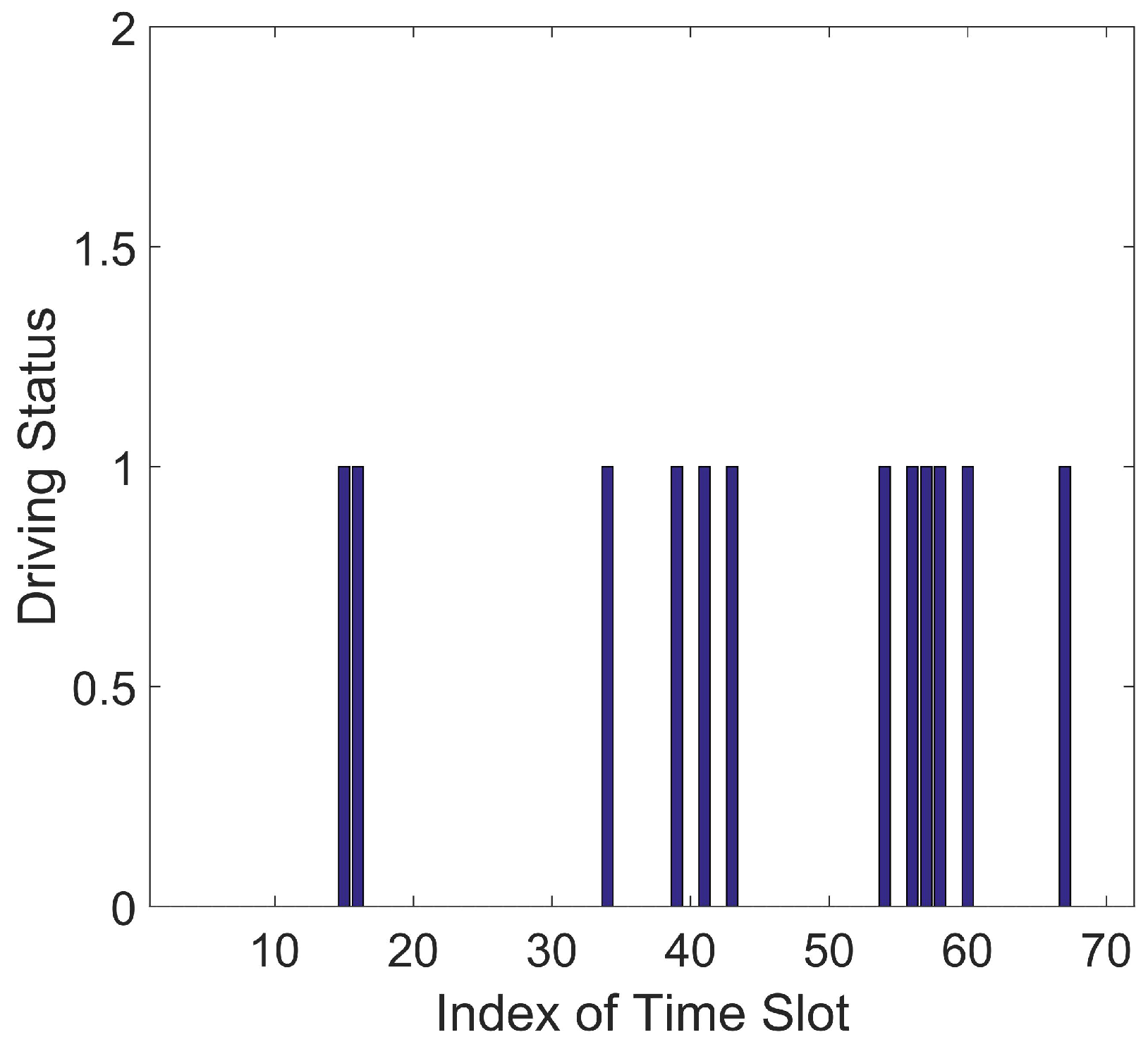
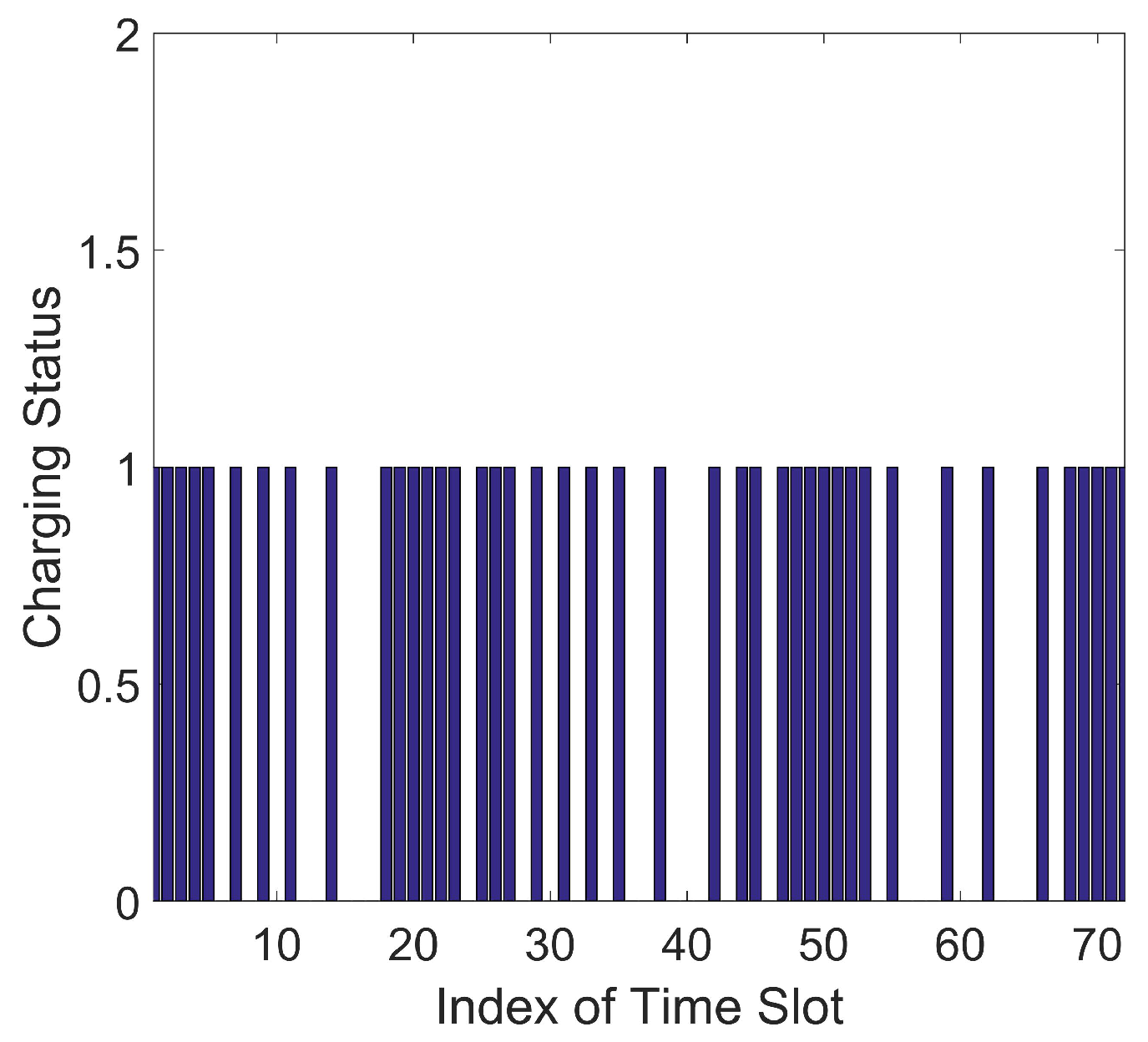
- We divide one day into N time slots. For each time slot, there are only two charging status, the charging status and non-charging status. For the non-charging status, it includes two cases. The first case is the idle case that means there is neither charging nor discharging. The second case is discharging when driving. We do not schedule for the time slot where the vehicle is driven. Even if the driving operation does not occupy a whole time slot, we consider the whole time slot as used for driving and do not conduct scheduling on the rest of that time slot.
- In any full time slot, we consider the energy consuming is E, which means that we employ an average energy demand per time slot regardless of the road condition or accelerating/decelerating status. For the time slot that is not fully occupied by charging time, we calculate the energy cost proportionally to the driving time.
3.2. Design of Optimization for Charging Schedule
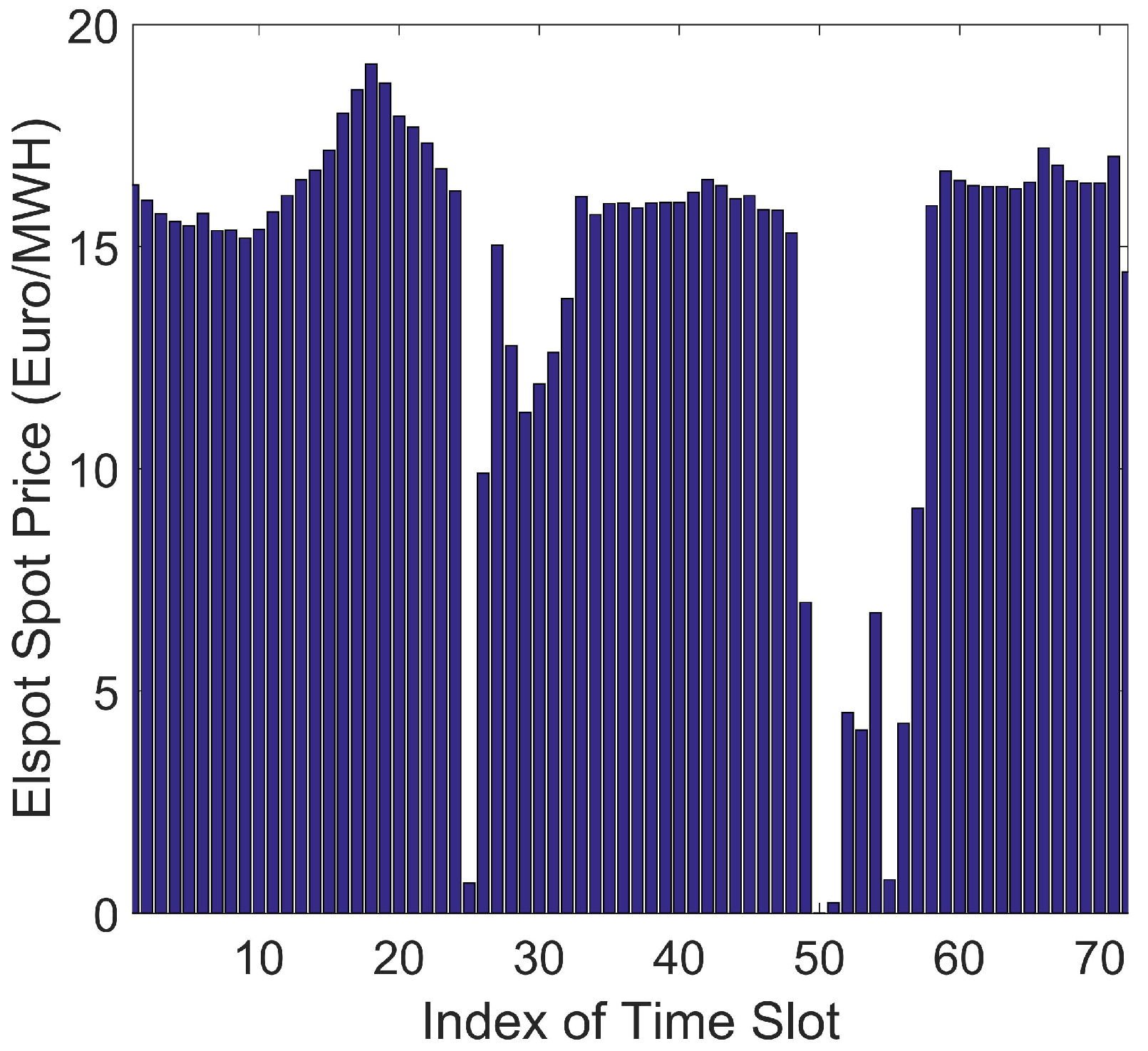
- Record the electricity spot prices per time slot in the next 24 time slots (hours).
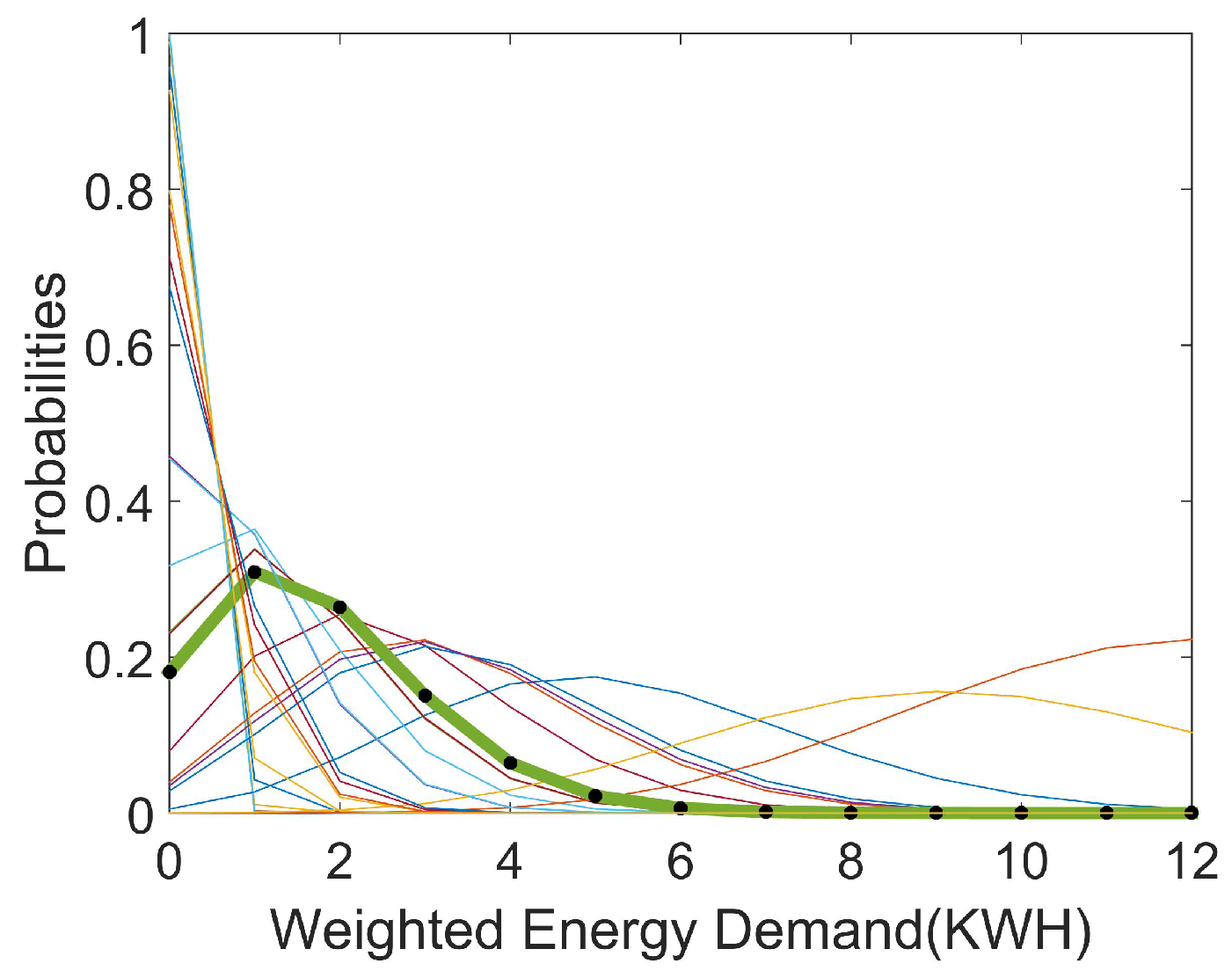
- Record the weighted energy demand per time slot in the next 24 time slots (hours).
- Input P and (total 48 decision variables) to BBO for optimization according to Algorithm 1.
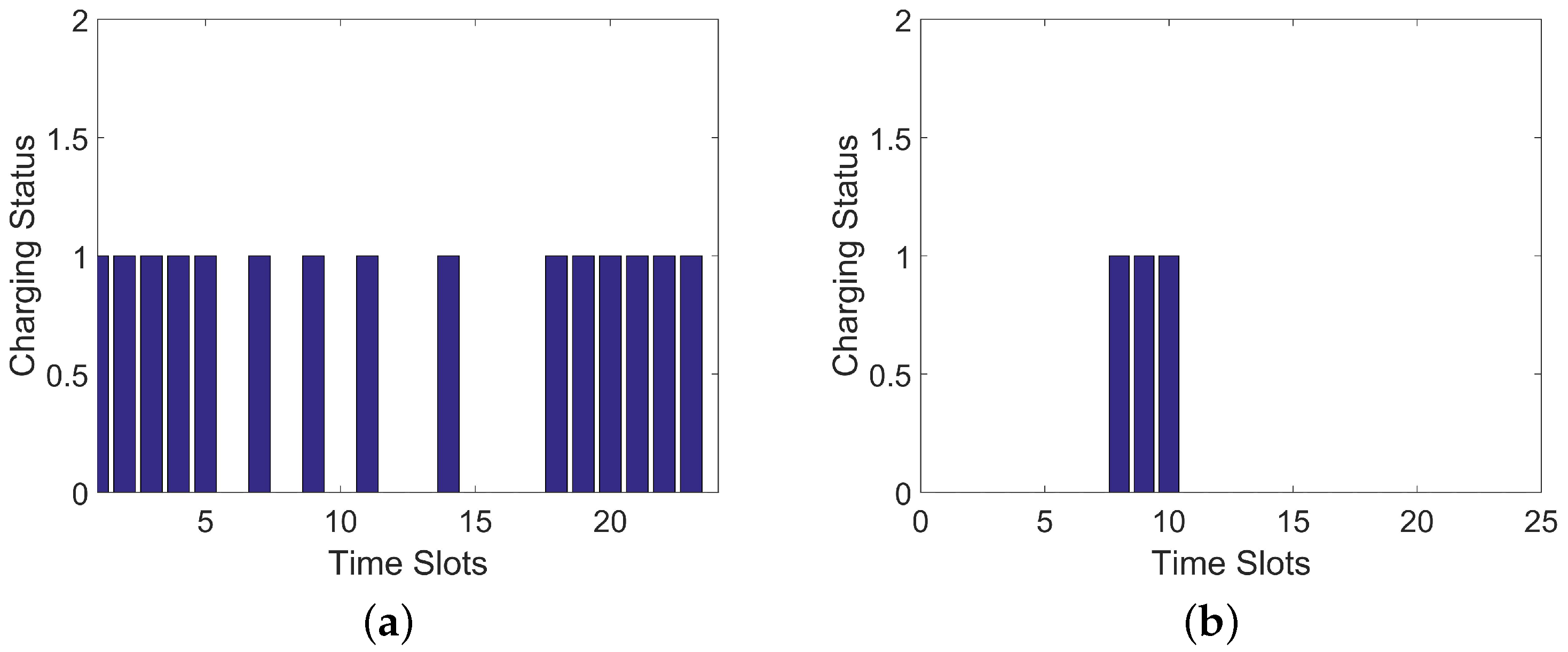
- Output the charging decision for each time slot in the next 24 h.
| Algorithm 2: Pseudo-codes of BBO for Personalized Charging Schedule. |
 |
4. Simulation and Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akbari, H.; Fernando, X. Modeling and optimization of PHEV charging queues. In Proceedings of the 2015 IEEE 28th Canadian Conference on Electrical and Computer Engineering (CCECE), Halifax, NS, Canada, 3–6 May 2015; pp. 81–86. [Google Scholar]
- Guo, F.; Inoa, E.; Choi, W.; Wang, J. Study on Global Optimization and Control Strategy Development for a PHEV Charging Facility. IEEE Trans. Veh. Technol. 2012, 61, 2431–2441. [Google Scholar] [CrossRef]
- Dong, Q.; Niyato, D.; Wang, P.; Han, Z. The PHEV Charging Scheduling and Power Supply Optimization for Charging Stations. IEEE Trans. Veh. Technol. 2016, 65, 566–580. [Google Scholar] [CrossRef]
- Jin, C.; Tang, J.; Ghosh, P. Optimizing Electric Vehicle Charging: A Customer’s Perspective. IEEE Trans. Veh. Technol. 2013, 62, 2919–2927. [Google Scholar] [CrossRef]
- Green, R.C.; Wang, L.; Alam, M. The impact of plug-in hybrid electric vehicles on distribution networks: A review and outlook. Renew. Sustain. Energy Rev. 2011, 15, 544–553. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The Impact of Charging Plug-In Hybrid Electric Vehicles on a Residential Distribution Grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef]
- Sortomme, E.; El-Sharkawi, M.A. Optimal Charging Strategies for Unidirectional Vehicle-to-Grid. IEEE Trans. Smart Grid 2011, 2, 131–138. [Google Scholar] [CrossRef]
- Denholm, P.; Short, W. An Evaluation of Utility System Impacts and Benefits of Optimally Dispatched Plug-In Hybrid Electric Vehicles; Technical Report for National Renewable Energy Laboratory: Golden, CO, USA, 2006. [Google Scholar]
- Hadley, S.W. Impact of Plug-In Hybrid Vehicles on the Electric Grid; Technical report for Oak Ridge National Laboratory: Oak Ridge, TN, USA, 2006. [Google Scholar]
- Su, W.; Rahimi-Eichi, H.; Zeng, W.; Chow, M.Y. A Survey on the Electrification of Transportation in a Smart Grid Environment. IEEE Trans. Ind. Inform. 2012, 8, 1–10. [Google Scholar] [CrossRef]
- Mukherjee, J.C.; Gupta, A. A Review of Charge Scheduling of Electric Vehicles in Smart Grid. IEEE Syst. J. 2015, 9, 1541–1553. [Google Scholar] [CrossRef]
- Clement, K.; Haesen, E.; Driesen, J. Coordinated charging of multiple plug-in hybrid electric vehicles in residential distribution grids. In Proceedings of the 2009 IEEE/PES Power Systems Conference and Exposition, Seattle, WA, USA, 15–18 March 2009; pp. 1–7. [Google Scholar]
- Sundstrom, O.; Binding, C. Flexible Charging Optimization for Electric Vehicles Considering Distribution Grid Constraints. IEEE Trans. Smart Grid 2012, 3, 26–37. [Google Scholar] [CrossRef]
- Gan, L.; Topcu, U.; Low, S.H. Optimal decentralized protocol for electric vehicle charging. IEEE Trans. Power Syst. 2013, 28, 940–951. [Google Scholar] [CrossRef]
- Vasirani, M.; Ossowski, S. A Computational Monetary Market for Plug-In Electric Vehicle Charging. In Proceedings of the Auctions, Market Mechanisms, and Their Applications: Second International ICST Conference (AMMA 2011), New York, NY, USA, 22–23 August 2011; Coles, P., Das, S., Lahaie, S., Szymanski, B., Eds.; Springer: Berlin/Heidelberg, 2012; pp. 88–99. [Google Scholar]
- Bessa, R.J.; Matos, M.A. Global against divided optimization for the participation of an EV aggregator in the day-ahead electricity market. Part I: Theory. Electr. Power Syst. Res. 2013, 95, 309–318. [Google Scholar] [CrossRef]
- Pecas Lopes, J.A.; Soares, F.J.; Rocha Almeida, P.M. Integration of Electric Vehicles in the Electric Power System. Proc. IEEE 2011, 99, 168–183. [Google Scholar] [CrossRef]
- Han, S.; Han, S.; Sezaki, K. Development of an Optimal Vehicle-to-Grid Aggregator for Frequency Regulation. IEEE Trans. Smart Grid 2010, 1, 65–72. [Google Scholar]
- Skugor, B.; Deur, J. Dynamic programming-based optimisation of charging an electric vehicle fleet system represented by an aggregate battery model. Energy 2015, 92, 456–465. [Google Scholar] [CrossRef]
- Jang, S.; Han, S.; Han, S.H.; Sezaki, K. Optimal decision on contract size for V2G aggregator regarding frequency regulation. In Proceedings of the 2010 12th International Conference on Optimization of Electrical and Electronic Equipment, Brasov, Romania, 20–22 May 2010; pp. 54–62. [Google Scholar]
- Ansari, M.; Al-Awami, A.T.; Sortomme, E.; Abido, M.A. Coordinated bidding of ancillary services for vehicle-to-grid using fuzzy optimization. IEEE Trans. Smart Grid 2015, 6, 261–270. [Google Scholar] [CrossRef]
- Pedrasa, M.A.A.; Spooner, T.D.; MacGill, I.F. Coordinated Scheduling of Residential Distributed Energy Resources to Optimize Smart Home Energy Services. IEEE Trans. Smart Grid 2010, 1, 134–143. [Google Scholar] [CrossRef]
- Maly, D.K.; Kwan, K.S. Optimal battery energy storage system (BESS) charge scheduling with dynamic programming. IEE Proc. Sci. Meas. Technol. 1995, 142, 453–458. [Google Scholar] [CrossRef]
- Li, F.; Qiao, W.; Sun, H.; Wan, H.; Wang, J.; Xia, Y.; Xu, Z.; Zhang, P. Smart Transmission Grid: Vision and Framework. IEEE Trans. Smart Grid 2010, 1, 168–177. [Google Scholar] [CrossRef]
- Shireen, W.; Patel, S. Plug-in Hybrid Electric Vehicles in the smart grid environment. In Proceedings of the 2010 IEEE PES Transmission and Distribution Conference and Exposition: Smart Solutions for a Changing World, New Orleans, LA, USA, 19–22 April 2010. [Google Scholar]
- Xu, Z.; Hu, Z.; Song, Y.; Zhao, W.; Zhang, Y. Coordination of PEVs charging across multiple aggregators. Appl. Energy 2014, 136, 582–589. [Google Scholar] [CrossRef]
- Kuran, M.S.; Viana, A.C.; Iannone, L.; Kofman, D.; Mermoud, G.; Vasseur, J.P. A Smart Parking Lot Management System for Scheduling the Recharging of Electric Vehicles. IEEE Trans. Smart Grid 2015, 6, 2942–2953. [Google Scholar] [CrossRef]
- He, Y.; Venkatesh, B.; Guan, L. Optimal Scheduling for Charging and Discharging of Electric Vehicles. IEEE Trans. Smart Grid 2012, 3, 1095–1105. [Google Scholar] [CrossRef]
- Su, W.; Chow, M.Y. Performance evaluation of a PHEV parking station using Particle Swarm Optimization. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011; pp. 1–6. [Google Scholar]
- Su, W.; Chow, M.Y. Computational intelligence-based energy management for a large-scale PHEV/PEV enabled municipal parking deck. Appl. Energy 2012, 96, 171–182. [Google Scholar] [CrossRef]
- Yao, L.; Damiran, Z.; Lim, W.H. Optimal Charging and Discharging Scheduling for Electric Vehicles in a Parking Station with Photovoltaic System and Energy Storage System. Energies 2017, 10, 550. [Google Scholar] [CrossRef]
- Xue, Y.; Jiang, J.; Zhao, B.; Ma, T. A self-adaptive articial bee colony algorithm based on global best for global optimization. Soft Comput. 2017, 1–18. [Google Scholar] [CrossRef]
- Zhang, J.; Tang, J.; Wang, T.; Chen, F. Energy-efficient data-gathering rendezvous algorithms with mobile sinks for wireless sensor networks. Int. J. Sens. Netw. 2017, 23, 248–257. [Google Scholar] [CrossRef]
- Ma, T.; Zhang, Y.; Cao, J.; Shen, J.; Tang, M.; Tian, Y.; Al-Dhelaan, A.; Al-Rodhaan, M. KDVEM: A k-degree anonymity with Vertex and Edge Modification algorithm. Computing 2015, 70, 1336–1344. [Google Scholar]
- Liu, Q.; Cai, W.; Shen, J.; Fu, Z.; Liu, X.; Linge, N. A speculative approach to spatia-temporal efficiency with multi-objective optimization in a heterogeneous cloud environment. Secur. Commun. Netw. 2016, 9, 4002–4012. [Google Scholar] [CrossRef]
- Xia, Z.; Wang, X.; Sun, X.; Wang, Q. A secure and dynamic multi-keyword ranked search scheme over encrypted cloud data. IEEE Trans. Parallel Distrib. Syst. 2015, 27, 340–352. [Google Scholar] [CrossRef]
- Hertz, A.; Kobler, D. A framework for the description of evolutionary algorithms. Eur. J. Oper. Res. 2000, 126, 1–12. [Google Scholar] [CrossRef]
- Cartwright, H. An introduction to evolutionary computation and evolutionary algorithms. In Applications of Evolutionary Computation in Chemistry; Springer: Berlin/Heidelberg, 2004; Volume 110, pp. 1–32. [Google Scholar]
- Man, K.; Tang, K.; Kwong, S. Genetic algorithms: Concepts and applications. IEEE Trans. Ind. Electron. 1996, 43, 519–534. [Google Scholar] [CrossRef]
- Das, S.; Suganthan, P.N. Differential Evolution: A Survey of the State-of-the-Art. IEEE Trans. Evolut. Comput. 2011, 15, 4–31. [Google Scholar] [CrossRef]
- Dorigo, M.; Stützle, T. Ant Colony Optimization; MIT Press: Cambridge, MA, USA, 2004. [Google Scholar]
- Guo, W.; Chen, M.; Wang, L.; Mao, Y.; Wu, Q. A survey of biogeography-based optimization. Neural Comput. Appl. 2016, 28, 1–18. [Google Scholar] [CrossRef]
- Simon, D. Biogeography-Based Optimization. IEEE Trans. Evolut. Comput. 2008, 12, 702–713. [Google Scholar] [CrossRef]
- Guo, W.; Wang, L.; Wu, Q. An analysis of the migration rates of Biogeography-based Optimization. Inf. Sci. 2014, 254, 111–140. [Google Scholar] [CrossRef]
- Guo, W.; Wang, L.; Ge, S.S.; Ren, H.; Mao, Y. Drift analysis of mutation operations for biogeography-based optimization. Soft Comput. 2015, 19, 1881–1892. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trip Number | Start Time | Finish Time | ||
|---|---|---|---|---|
| 1 | 2001/12/7 | 16:07:38 | 2001/12/7 | 16:18:55 |
| 2 | 2001/12/7 | 16:25:52 | 2001/12/7 | 16:46:22 |
| 3 | 2001/12/7 | 17:05:52 | 2001/12/7 | 17:18:47 |
| 4 | 2001/12/7 | 17:48:06 | 2001/12/7 | 17:49:57 |
| 5 | 2001/12/7 | 18:00:45 | 2001/12/7 | 18:09:51 |
| 6 | 2001/12/8 | 10:31:02 | 2001/12/8 | 10:36:52 |
| 7 | 2001/12/8 | 10:51:53 | 2001/12/8 | 10:57:29 |
| 8 | 2001/12/8 | 11:04:00 | 2001/12/8 | 11:05:09 |
| 9 | 2001/12/8 | 11:26:36 | 2001/12/8 | 11:31:29 |
| 10 | 2001/12/8 | 11:55:51 | 2001/12/8 | 11:55:53 |
| 11 | 2001/12/8 | 12:09:09 | 2001/12/8 | 12:17:00 |
| 12 | 2001/12/9 | 10:32:17 | 2001/12/9 | 10:36:14 |
| 13 | 2001/12/9 | 13:35:47 | 2001/12/9 | 13:40:48 |
| 14 | 2001/12/10 | 06:32:14 | 2001/12/10 | 06:58:57 |
| 15 | 2001/12/10 | 15:27:37 | 2001/12/10 | 15:41:10 |
| 16 | 2001/12/10 | 15:48:42 | 2001/12/10 | 16:08:54 |
| 17 | 2001/12/11 | 06:33:45 | 2001/12/11 | 06:59:00 |
| 18 | 2001/12/11 | 15:31:53 | 2001/12/11 | 15:57:37 |
| 19 | 2001/12/11 | 16:07:49 | 2001/12/11 | 16:12:11 |
| 20 | 2001/12/11 | 16:28:16 | 2001/12/11 | 16:30:37 |
| Algorithm Names | Charging Cost (€) | Averaged Run Time (Seconds) | ||
|---|---|---|---|---|
| Best | Mean | Worst | ||
| GA | 1.87 | 1.89 | 1.96 | 4.27 |
| ACO | 1.83 | 1.85 | 1.91 | 5.33 |
| BBO | 1.71 | 1.72 | 1.74 | 4.12 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, F.; Jiang, J.; Ding, Z.; Hu, J.; Guo, W.; Wang, L. A Personalized Rolling Optimal Charging Schedule for Plug-In Hybrid Electric Vehicle Based on Statistical Energy Demand Analysis and Heuristic Algorithm. Energies 2017, 10, 1333. https://doi.org/10.3390/en10091333
Kong F, Jiang J, Ding Z, Hu J, Guo W, Wang L. A Personalized Rolling Optimal Charging Schedule for Plug-In Hybrid Electric Vehicle Based on Statistical Energy Demand Analysis and Heuristic Algorithm. Energies. 2017; 10(9):1333. https://doi.org/10.3390/en10091333
Chicago/Turabian StyleKong, Fanrong, Jianhui Jiang, Zhigang Ding, Junjie Hu, Weian Guo, and Lei Wang. 2017. "A Personalized Rolling Optimal Charging Schedule for Plug-In Hybrid Electric Vehicle Based on Statistical Energy Demand Analysis and Heuristic Algorithm" Energies 10, no. 9: 1333. https://doi.org/10.3390/en10091333
APA StyleKong, F., Jiang, J., Ding, Z., Hu, J., Guo, W., & Wang, L. (2017). A Personalized Rolling Optimal Charging Schedule for Plug-In Hybrid Electric Vehicle Based on Statistical Energy Demand Analysis and Heuristic Algorithm. Energies, 10(9), 1333. https://doi.org/10.3390/en10091333