1. Introduction
Improvements in efficient energy utilization and reduction of carbon emissions are among the main factors in the sustainable development of energy systems [
1]. To combat global warming, the Paris Agreement was adopted under the United Nations Framework Convention on Climate Change (UNFCCC), with the goal of restricting global temperature increases to below 2 °C above pre-industrial levels [
2]. Actions to reduce carbon emissions are key to achieving this goal [
3]. However, energy systems are still challenged by managing unsustainable fuel mixtures from various sources, and the integration of renewable energy. High carbon sources, such as coal and oil, are widely used in traditional generation plants (TGPs), thus the overall cost and carbon emissions may increase with growing energy demands [
4], subsequently requiring their urgent replacement with clean energy resources. Considering the intermittency and instability of renewable energy [
5], low-carbon generation plants (LGPs) using low-carbon energy sources such as nuclear power, and CO
2-sequestered power are required and must be operated on a scheduled power generation plan. The consequent regulation capacity may be insufficient, therefore, the regulation capacity and reserve capacity are primarily supported with TGPs. Furthermore, the lack of reserve capacity may also affect the integration of renewable energy.
Aimed at solving the aforementioned problems, the energy hub concept provides a new way of managing energy in an integrated energy system. Defined as an interface between energy input and energy demand, an energy hub is characterized by multiple energy coupling, effective management through energy conversion and dispatch, and load control on the demand side [
6,
7]. From the perspective of energy input in an energy hub, hydrogen is regarded as a green energy carrier for clean development due to its low environmental impact and durable nature [
8]. Combined with other energy carriers, hydrogen could make the energy systems more flexible and reliable [
9]. The produced hydrogen can be fed into the natural gas system using power to gas (P2G) technology, or used in fuel-cell-based transportation and industrial processes. It can be also re-electrified on demand using a fuel cell or directly marketed as a commodity [
10]. Accounting for the pathways of energy conversion mentioned previously and environmentally friendly effects, the concept of the energy hub can be extended to the clean energy hub (CEH) [
11]. On this basis, the energy management of a hydrogen-based CEH is the primary focus of this study.
Economic and environmental factors require a large yield of hydrogen. Water electrolysis is considered the simplest solution to isolate hydrogen, as it splits water into positively charged hydrogen ions and negatively charged oxygen ions. However, from the perspective of a device level, electrolyzers are widely spatially-distributed in large numbers, which make up a relatively high percentage of energy demand profile. Thus modeling methods and control strategies need to be further exploited.
Combined with load control technologies, utilization of the load aggregation characteristics plays a crucial role in CEH energy management. Considering operational constraints, aggregated small-scale electric loads can be regarded as a dispatchable resource [
12]. In this way, an effective integration mechanism for electrolyzer load is an efficient power plant (EPP) as discussed in [
13,
14]. The electrolyzer-based EPP model can exist as a distributed generator in a hydrogen-based CEH to facilitate resource regulation if implementing a reasonable control strategy; it also provides ancillary services and facilitates the integration of renewable energy.
Previous research [
15,
16] has shown that in a hydrogen-based energy system with high wind power penetration, a controlled electrolyzer population can be regulated as a load management mechanism for:
- (1)
Enhancing resilient economic dispatch, which minimizes the wind curtailment while offsetting wind fluctuations and increasing the system reserve capacity;
- (2)
Reducing environmental pressures, by generating hydrogen with a zero/low-carbon footprint.
However, detailed electric-to-hydrogen load dynamics and the deferrable nature of the electrolyzer have not been studied enough to reflect the energy constraints and the characteristics of self-regulation of electrolyzers. Both are necessary to access more realistic operational effects and enhance the regulation reserve capacity.
To obtain a synergistic control on both the system level and device level of an EPP, effective control strategies are necessary. Various control strategies are implemented to account for load types and control targets. In [
17], a comfort-constrained demand response (DR) control for distributed heat pump systems was proposed to provide ancillary services, such as the spinning reserve for power systems with higher energy efficiency. In [
18], a queuing-controlled strategy with lock-on and off constraint was proposed to control the aggregated thermostatically controlled loads, including water heaters. The queuing-controlled strategy enables thermostatically controlled appliances to provide the auxiliary service for frequency regulation and stable operation. In [
19], an energy-constrained state priority list model was established to analyze the charging response of aggregated deferrable electrolyzer units. In this study, an optimal energy state regulation (OESR) control strategy is proposed to aggregate electrolyzer loads, which has the following advantages:
- (1)
It is characterized by its ability to accurately respond to the control target.
- (2)
It satisfies system-level decision-making while considering user comfort constraints.
- (3)
It can be utilized to regulate the variability of renewable energy and filter larger fluctuations [
13].
By applying the proposed control strategy, electrolyzer aggregation can be utilized as a self-regulating DR management mechanism. Once the model for an operational-constrained electrolyzer-based EPP is developed, the economic and environment impacts of its operation and optimal dispatch can be evaluated to determine the online resource response (for both supply and demand sides) within the framework of the CEH energy management. In this study, a novel hybrid resource-constrained CEH optimization model is studied to integrate electrolyzer-based EPP, TGP, LGP, and wind power. As a flexible participant, the electrolyzer-based EPP is capable of providing reserve capacity and mitigating the wind curtailment problem due to increased wind energy penetration [
20]. This illustrates that the DR control strategy has a positive effect on active power and reserve re-dispatch. In addition, carbon emissions can be reduced due to EPP reserve shifting, where the generation burden is transferred to low-emission units.
This paper is organized as follows. In
Section 2, the comfort-constrained DR models to control distributed electrolyzers are presented to describe the electrolyzer-based EPP modeling. The hybrid resource-constrained operation optimization model, and the CEH energy management solution are presented in
Section 3. The modeling and simulation results with case studies are discussed in
Section 4, and the conclusions, as well as the scope of future work, are summarized in
Section 5.
3. Hybrid Resource Constrained Optimization and Energy Management Using Wind Energy and Electrolyzer Integration
At the level of optimal scheduling and energy management of a CEH integrating LGP, TGP, and electrolyzers, several system constraints should be considered depending on the location and control strategy of the electrolyzer applications. It is beyond the scope of this study to examine all these specific deployment configurations (i.e., the physical location of electrolyzers, the capacity of hydrogen storage, and infrastructure requirements and power flow modeling and security checking problem) that can be discussed in a follow-up study.
The configuration of the CEH is shown in
Figure 4, where the wind farm, LGP and TGP are mainly on the supply side, while a “demand side electrolyzers (DE) stock” is located at or near the main points of hydrogen demand [
22]. An additional load consisting of a “supply side electrolyzers (SE) stock” is placed in the supply side, near the wind farm and LGP, to absorb the wind power that cannot be accommodated by the CEH (otherwise curtailed). Transformer and power electronic converter (PEC) are installed for power conversion, while the electricity-to-hydrogen energy conversion is available via electrolyzers. System reserve is taken into account to withstand the uncertainty in the process of energy supply and utilization, maintaining the operation stability of CEH. The system reserve capacity can be provided by TGP, LGP and electrolyzer-based EPP. The electrolyzer-based EPP can be divided into DE-EPP and SE-EPP, and it is also worth mentioning that the TGP is necessary due to its advantageous ability in regulation and response. On the other hand, from the perspective of decarbonization, it is encouraged to replace this TGP with other low carbon sources like LGP and electrolyzer-based EPP. In addition, the fuel mix for each combination of LGP, wind farm and TGP is also required as input data in order to determine the carbon emissions.
The energy demand in a CEH can be met through a variety of energy conversion and dispatch process in response to the specific targets, indicating the potential of energy management. For example, the customer load can be supplied by TGP, LGP or wind power. In order to address this characteristic of flexible dispatch, the mathematical model of the CEH proposed in
Figure 4 can be expressed as:
where
,
and
represent the dispatch factors defining power dispatched to reserve capacity, customer load and DE from TGP, respectively;
,
,
and
represent the dispatch factors defining power dispatched to reserve capacity, DE, customer load and SE from LGP, respectively;
,
and
represent the dispatch factors defining power dispatched to DE, customer load and SE from the wind farm.
,
and
stand for the power supply by TGP, LGP and the wind farm, respectively.
,
,
and
denote the demand of customer load, demand side electrolyzer load, supply side electrolyzer load and hydrogen, respectively.
In this study, it is assumed that all the hydrogen produced by electrolyzers are sold for power generation, thus the energy revenue can be included in the optimization model. Hydrogen fuel quality leads to its issues related transportation and storage. By producing the hydrogen locally through distributed electrolyzers, and utilizing the daily quotas immediately, the problems associated with the transportation and storage costs can be avoided [
21].
3.1. Objective Function Definition
In order to minimize the system cost while reduce the carbon emissions of the CEH, the optimization objective of economic dispatch can be modeled by a linear programming problem. Considering that there is a limit of wind directly integrated into CEH, the excess part will be curtailed due to system stability considerations [
23]. In this regard, the cost for wind curtailment
is integrated into the optimization model:
For the sake of simplifying the representation of the optimization model where:
: number of power plants and electrolyzers existing in the CEH;
: total energy cost for generation consisting of fuel consumption, O&M and carbon emissions;
: total reserve cost for generation;
: the energy consumption cost to produce hydrogen for electrolyzers consisting of O&M and carbon emissions;
: total reserve cost for EPP provision;
: total cost for curtailed wind;
: the energy revenue from hydrogen power generation;
: spot prices to define the TGP, LGP and electrolyzer-based EPP environmental cost characteristics;
: constant reserve prices for TGP, LGP and electrolyzer-based EPP;
: energy price of hydrogen power generation and hydrogen energy produced from the CEH;
: cost defining wind curtail characteristics;
: wind power being curtailed;
: power plants (LGP and TGP) outputs and aggregated power consumption to produce hydrogen;
: power plants (LGP and TGP) reserve and responsive load reserve.
The emissions cost of each generation resource is calculated based on a carbon tax, which we use its current value of
$30 per metric ton of carbon dioxide equivalent (MtCO
2eq) [
24] in order to monetize the environmental cost of operating a particular generation resource. The model implements numerical values for the other resource parameters can be found in [
14]. Considering fuel, operational, and environmental impacts, and the spot price
is modeled by:
where
stands for the number index of LGP and TGP,
is the fuel cost,
is the operating & maintenance cost,
and
represent greenhouse gas emission intensities and carbon tax caused by power plants, respectively.
As a regulating and reserve revenue evaluation of electrolyzer-based EPP model, several generation-type parameters are also defined from [
25]. The spot price
for producing hydrogen process is given by:
where
represents number index of electrolyzer-based EPP,
is the greenhouse gas caused by hydrogen production process,
is variable operating & maintenance cost for producing hydrogen,
is carbon tax caused by electrolyzers,
represents lower heating value,
is the revenue from producing hydrogen.
3.2. Equality and Inequality Constraints
Equality constraints of CEH energy balance can be obtained by Equations (18) and (19). The flexible energy dispatch is crucial for the hybrid resource constrained optimization. The OESR control strategy and the application of electrolyzer-based EPP exert great impacts on power and reserve re-dispatch, making the aggregation of distributed electrolyzers acts as a dispatchable short term energy balancing resources [
17]. The equality constraints of CEH dispatch factors can be illustrated as:
The output of power plants LGP, TGP and electrolyzer-based EPP should be limited into:
where
and
represent power outputs limits of LGP and TGP,
and
represent feasible boundaries of aggregated power consumption of electrolyzers.
Meanwhile, the ramping constraints of controlled units and loads to provide the regulation reserve are summarized as:
where
and
represent the ramping constraints of power plants and controlled electrolyzers.
A set of constraints for supplying reserve are also defined for all the units and loads:
All the components of supply and demand side should be non-negative:
3.3. The Energy Management Solution for Clean Energy Hub
In this study, the CEH functions as an interface between the energy producer (TGP, LGP, and wind energy) and the consumer (customer loads and electrolyzers). The diversities of the fuel mixture on the supply side highlight the flexibility and optimization potential of a CEH. Given that the integration of renewable energy and reduction of carbon emissions are stressed as the optimization objective, energy replacement in the CEH is encouraged for the sake of the economy and environmental benefits. However, the TGP is necessary because it provides the system reserve that maintains the operational stability. In this regard, it is actually a trade-off between the economy, environment, and system stability. Thus, it is vital to coordinate with various low carbon resources. Among these, the load management plays a significant role, and an accurate and reasonable DR control strategy is the key issue.
The energy management solution for the CEH consists of three primary parts: the OESR control strategy stage, the EPP modeling stage and the optimization stage, as illustrated in
Figure 5.
After the CEH structure and the operation parameters are set in the initialization process, the CEH energy management starts from the OESR control strategy stage. With the application of the hysteresis control, the deferrable characteristic of electrolyzers is enhanced and thus the controllability of the aggregated electrolyzers can be improved. Based on this, the OESR control strategy is implemented to achieve the accurate and effective management of aggregated populations of controllable loads in response to the optimal target, which is updated from the hybrid resource constrained optimization process.
In the next stage, by analyzing the bound power consumption dynamics of aggregated electrolyzers, the comfort-constraint based EPP model is established. The EPP comfortable boundaries also elucidate the potential regulation ability in providing the CEH spinning reserve and reducing the TGP output power.
As a flexible and self-regulating participant, the electrolyzer-based EPP is then integrated into the optimization stage, which illustrates that the DR control strategy has a positive effect on active power and reserve re-dispatch. Therefore, the optimal target for the controllable loads in the next time interval can be obtained.
4. Case Studies
The case study part assumes a CEH attempting to pursue a low carbon fuel mix along with the verification of the proposed control strategy of aggregated electrolyzers. The structure of the CEH is illustrated in
Figure 4. The conventional generation is defined to consist of both a LGP and a TGP. The LGP, wind farms, as well as the EPP represent the low-carbon resources (the clean energy), while the TGP represents a carbon intensive resource.
Three kinds of loads are considered in the CEH, consumer residential load, DE on the demand side and SE on the supply side. In all cases, customer loads are normal end-use loads, such as air conditioners, lights, and plug loads. The power rating of the electrolyzers is uniformly distributed in a range of 5–20 kW, which is commissioned to produce 0.031 kg/kWh of hydrogen (based on the
LHV = 33.3 kWh/kg for hydrogen) over the production period of one day. The efficiency of the production process is sensitive to the voltage applied across the electrolytic cells, where it is assumed that in each case the rated power for an operating unit corresponds to the maximum efficiency associated with the number of electrolytic cells encompassed. A summary of the parameters implemented in the electrolyzer example is provided in
Table A1 of
Appendix A. No other energy storage technologies or load management mechanisms have been considered in the study presented here.
It is assumed that all power plants and controlled electrolyzer loads act to provide regulation service requirements caused by the intermittency of wind power. Electrolyzer operations and emission punishments are considered in this model. All corresponding economic and environmental parameters for units and loads are defined as constant values shown in
Table A2 of
Appendix A [
21]. The optimization model is run over a 24-h time-period at a frequency of 1 min (1440 decision making intervals for regulation time-scales), but the methodology is applicable to any appropriate time based simulation. The main outputs are daily energy balances, load profiles and carbon intensities for electricity. The results are analyzed in terms of the time-varying generation outputs, and two specific scenarios are studied, namely with and without access to a DR control for the electrolyzer loads. The simulation was run on an Intel Core i5-2540M, 2.60 GHz processor with 8 GB of RAM.
To explore the impacts of different parameters on the results, four cases were studied.
Table 1 provides brief descriptions of the four cases.
4.1. Case-1: Aggregated Charging Performance of Efficient Power Plant Based on Optimal Energy State Regulation Control Strategy
Wind penetration
is defined as the ratio of the installed capacity of the wind farm to the maximum system demand (
MSD)
[
21]. According to [
23], there is a 30% penetration limit on the wind power output directed to the grid, as described in the following equation:
This implies that the wind will be curtailed whenever the wind energy exceeds 30% of the total system demand (including customer demand and electrolyzers located on the demand side) [
21]. For this case, the wind penetration
is considered as 30%. The 400 DE loads
and 400 SE loads
are located on the demand and supply side, of which 30% of DE loads and 50% of SE loads are controlled. The uncontrolled power consumption for all loads and the wind profile used in the simulation are shown in
Figure 6. In this case, the wind power is fully integrated to supply the loads, and the controlled electrolyzers primarily impact the CEH energy dispatch.
Table 2 summarizes the numerical values implemented to parameterize the generation and EPP model in the operation process. In this case, the total reserve is defined as:
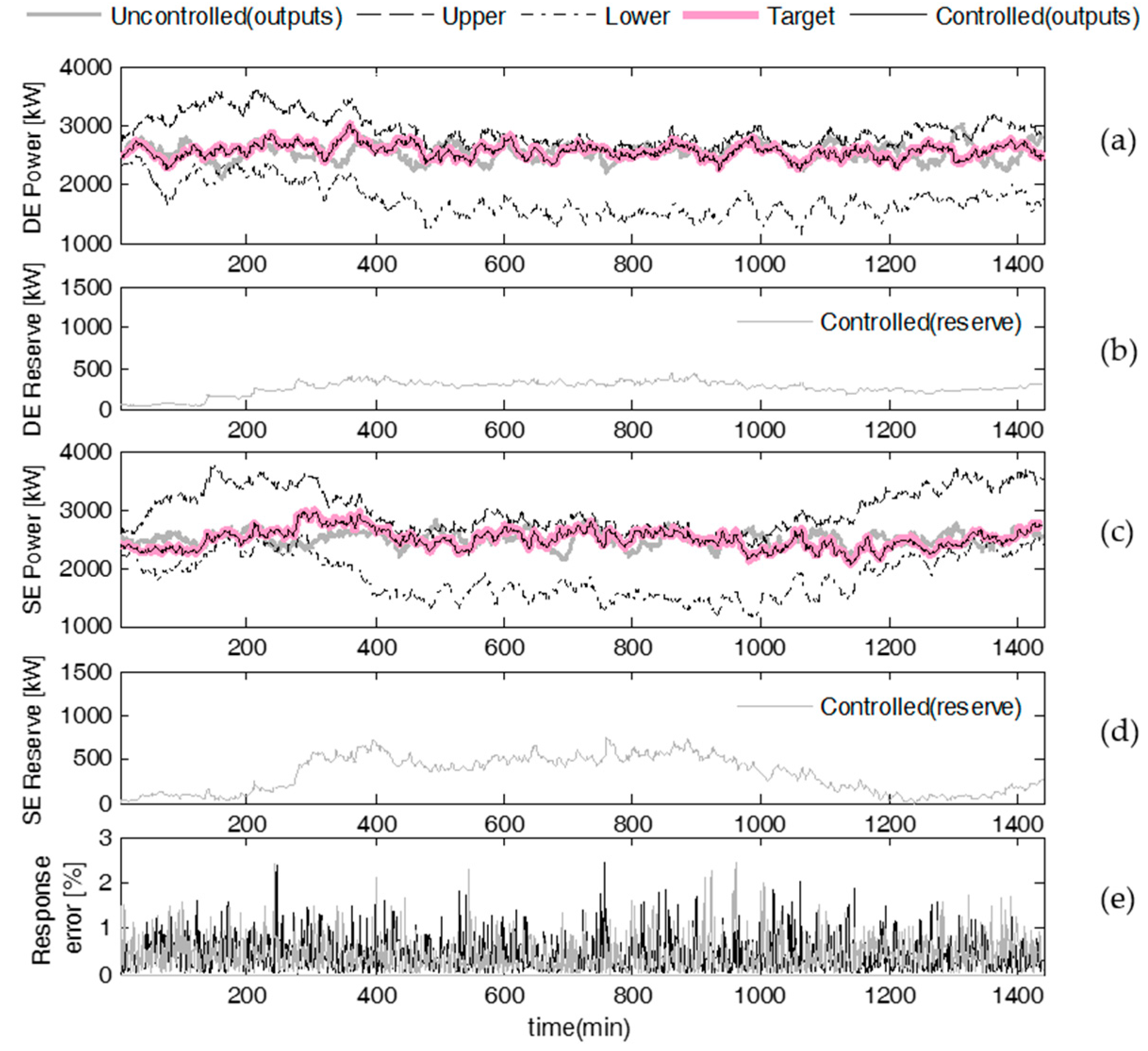
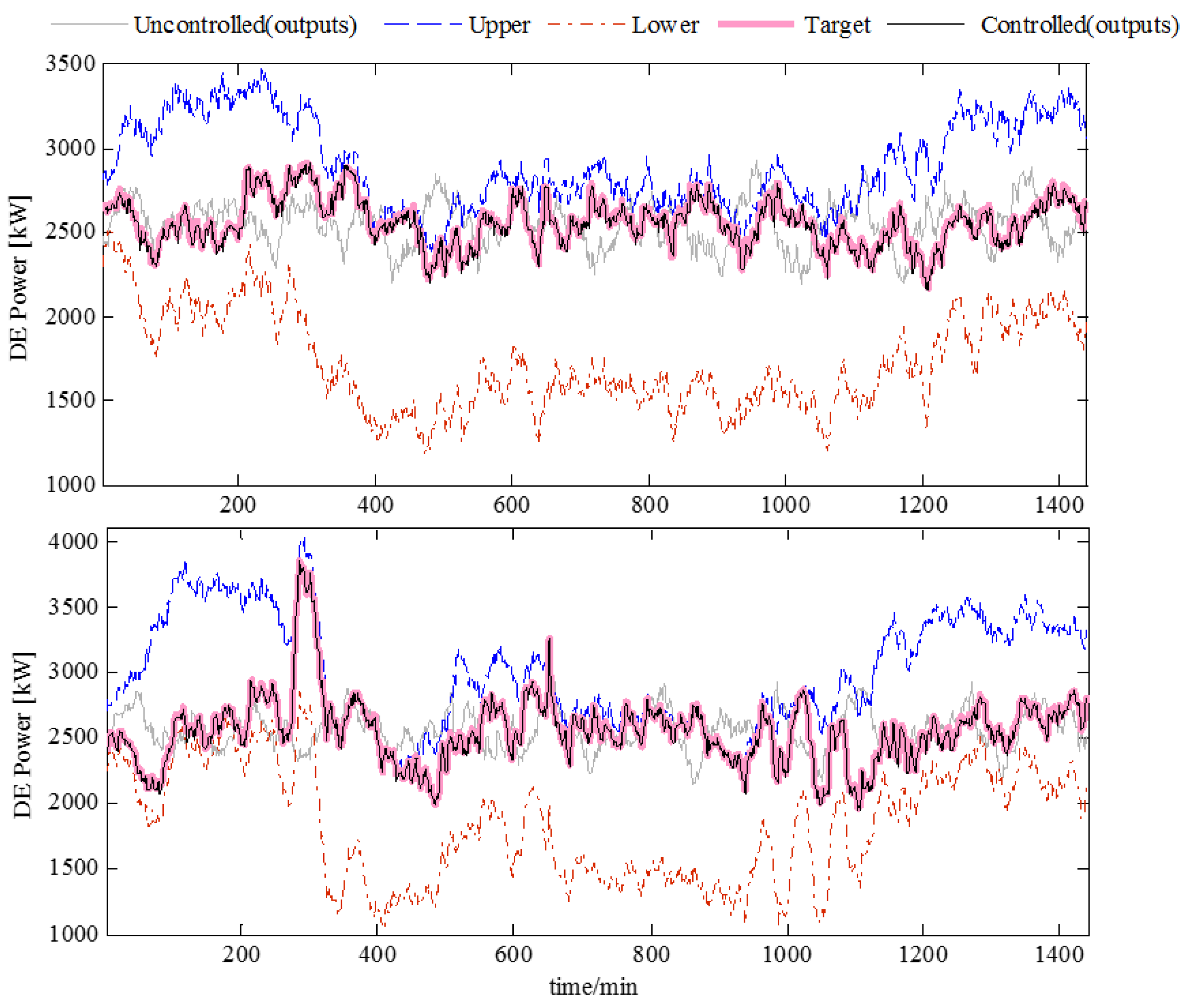
In the simulation results from Case-1, without considering the EPP reserve, the DE and SE loads are operated to maintain a certain region to provide a virtual reserve, as shown in
Figure 7b,d. The results show that the actual response of the controlled loads is well aligned with the target, which is obtained from the optimization model in
Section 3. Meanwhile, the effective control strategy ensures that maintaining this response generates an error less than 3%, which is expressed as:
As shown in
Figure 7a–c, more hydrogen is expected to be generated to integrate more wind energy, especially when the customer load profile is at its relative valley and wind energy is at its relative peak (
Figure 6) during t = 800–1000 min. In addition, the EPP reserve is limited by the feasible operating boundaries of the electrolyzers because the controlled power trajectory has to follow the limits without any variable margin to support this service.
As shown in the
Figure 8, the TGP provides more regulation reserve than the LGP due to its flexible regulatory capacity in the uncontrolled scenario. In the controlled scenario, the reserves from the TGP and LGP decrease further due to the integration of the EPP reserve provided by DE and SE. Meanwhile, as seen in
Figure 9, the total system cost also decreases by 10.2%, from approximately
$705.6 (the uncontrolled case) to
$633.6 (the controlled case) per day because the cheaper reserve service is preferred.
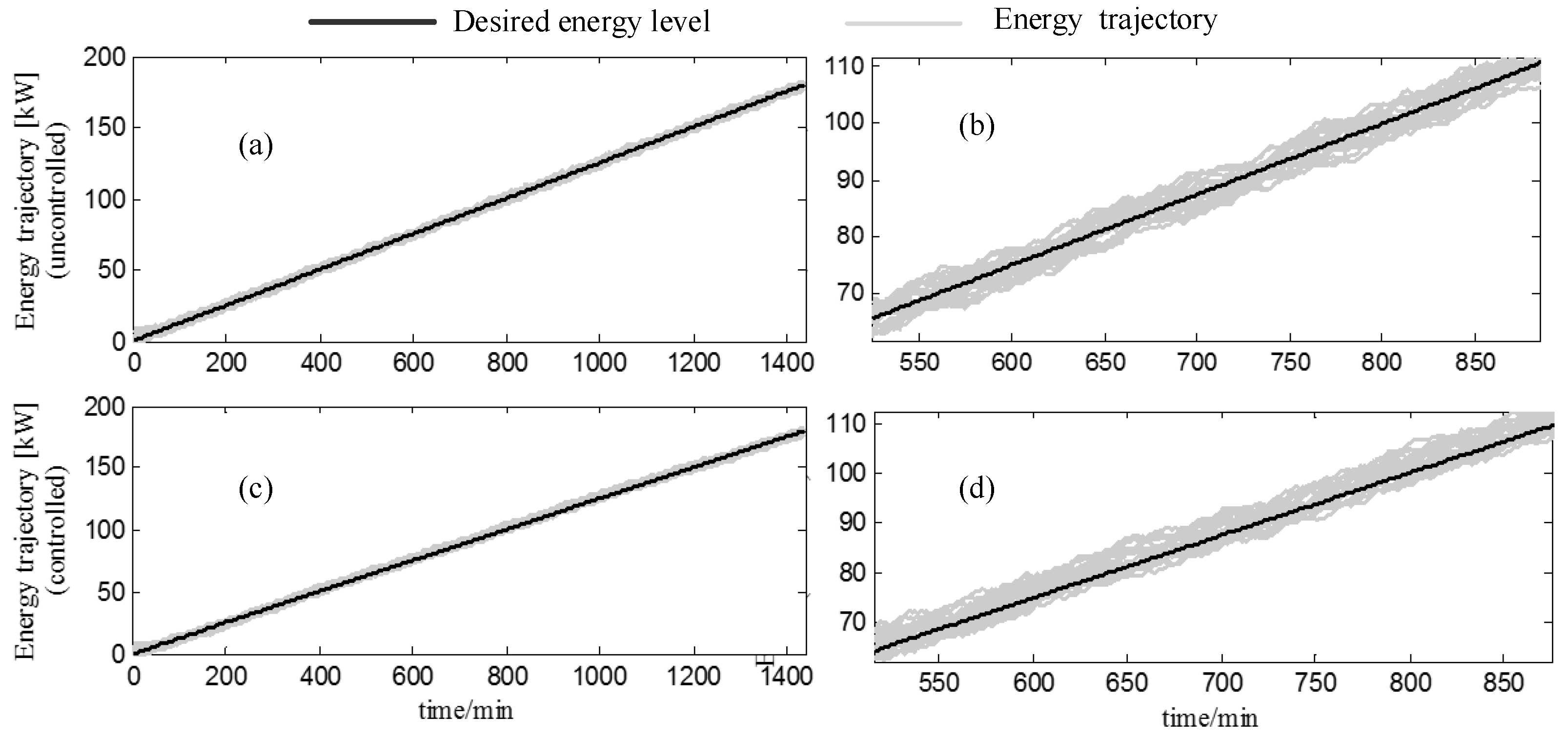
The charging trajectory and relative energy state of the DE are shown in
Figure 10 and
Figure 11. All the charging energy trajectories of the uncontrolled and controlled scenarios are determined using Equation (1). In the uncontrolled case shown in
Figure 10a,b, all energy trajectories are determined with hysteresis control, and in the controlled case, they are modified due to the OESR control strategy, as shown in
Figure 10c,d. The trajectories in
Figure 10d ascend due to the optimal regulation signal
, especially in comparison to energy trajectories in a magnified time range [600, 800].
Similarly, as shown in
Figure 11, the energy state for an individual electrolyzer also indicates the control result of the OESR strategy. In particular, there are obvious changes in
that occur in a time range where there are obvious variations in the load following signal
. Due to the optimal regulation
, the energy state of an individual electrolyzer is operated within the boundary constraints to respond to the optimal target.
4.2. Case-2: Impacts of Increasing the Response Capacity of the Controlled Load
In this case, the proportion of controlled load varies from 0% to 100% of the total DE or SE. The level of wind penetration is 30% and there is no wind curtailment. The electrolyzer parameters are the same as those for Case-1. Three scenarios are simulated. In scenario A, only the DE controlled case was modeled, while in scenario B, only the SE controlled case was modeled. In scenario C, the model coordinated the control of the DE and SE.
The changes of the controlled load response capacity have a significant effect on reserve dispatch and generation plants output power. In general, with the increase of the controlled load proportion, the potential regulation ability of comfort-constraint based EPP is enhanced, and from the perspective of economy and environmental benefits, the task of providing the spinning reserve is gradually undertaken by the EPP. As a self-regulating participant capable of providing the flexible reserve, the integration of EPP also results in the consequent diversities in TGP/LGP output power.
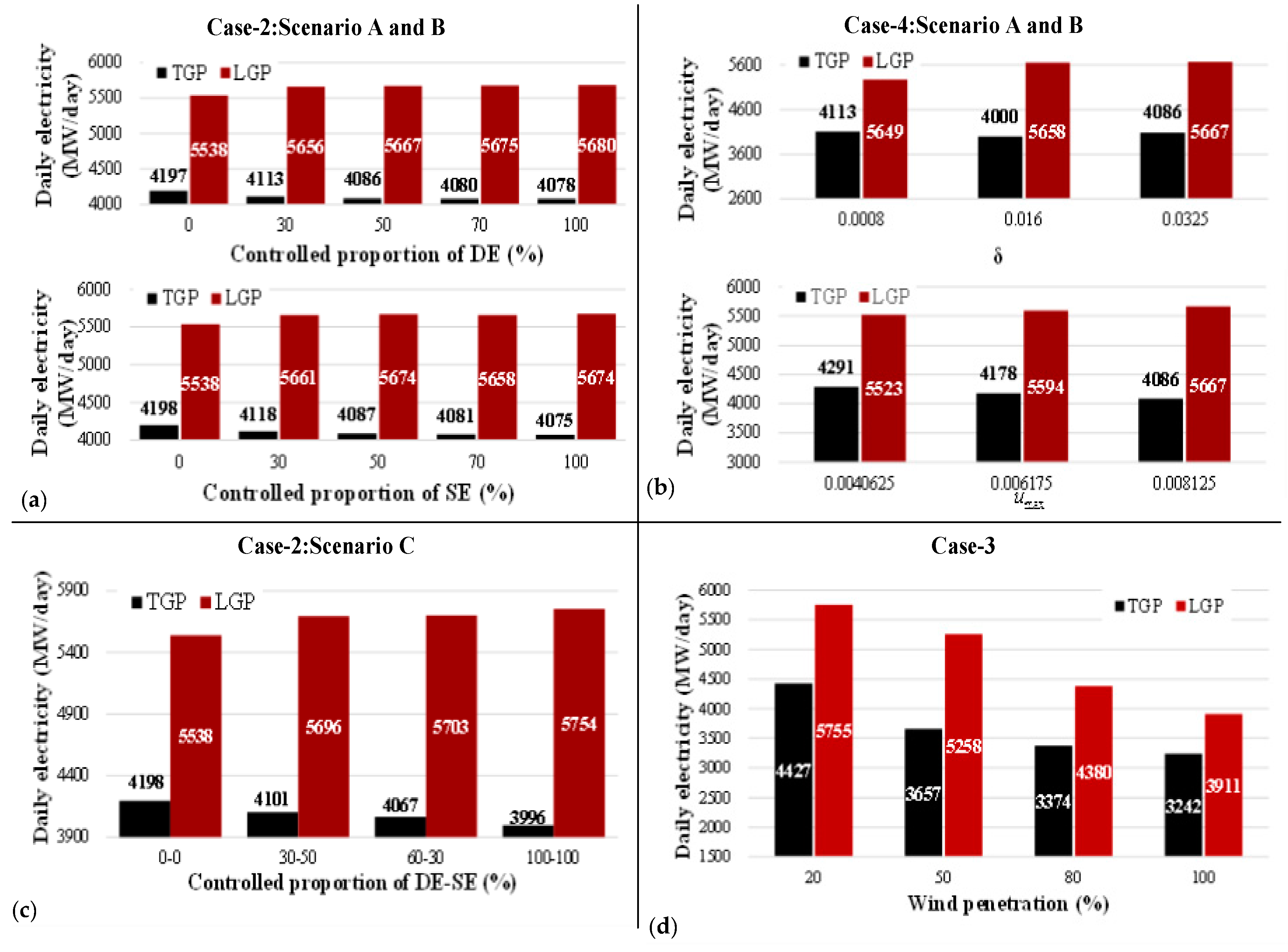
Taking scenario A as the example, the increased proportion of controlled DE causes the significant decrease of TGP and LGP reserve. In contrast, due to the lower cost provided, the DE-EPP virtual reserve rises rapidly, reaching 1129 MW when the controlled proportion of the DE reaches 100%, as seen in
Figure 12a.
The diversities of TGP/LGP output power can be illustrated from
Figure 13, where the daily electricity from TGP is reduced by 119 MW per day, and that from the LGP increases by 142 MW due to less carbon emissions produced. The output from the TGP has a lower limit to maintain a safe CEH operation.
The aggregated controlled electrolyzers also have the potential to integrate more wind energy, which is even more important when accounting for wind curtailment. As shown in
Figure 14a, over 40% of wind electricity is transferred to the DE in the controlled cases. Compared to the controlled proportion 50% and 100%, the wind energy transferred to the DE decreases. There are two possible explanations for this. First, as depicted in
Figure 15, a better performance in tracking the target and less power consumption can be achieved as the DE controlled proportion increases. The enhanced potential regulation ability of EPP leads to the decrease of average target power per minute from 2580 kW to 2570 kW, as well as the average upper and lower boundary difference from 1183 kW to 1173 kW, satisfying the comfort constraint of end-use customers. This produces differences in wind power dispatch factor, where
(indicating wind power dispatched to DE) decreases from 0.25 to 0.24. Second, although a greater yield of hydrogen is encouraged, the upper limit of hydrogen production is reached before the controlled proportion of the DE reaches 100%. In this regard, more wind energy is dispatched to the customer load and the SE to maintain the energy balance. Considering that SE is not controlled in this scenario, the wind integration with the SE is limited and the customer load consumes more wind energy.
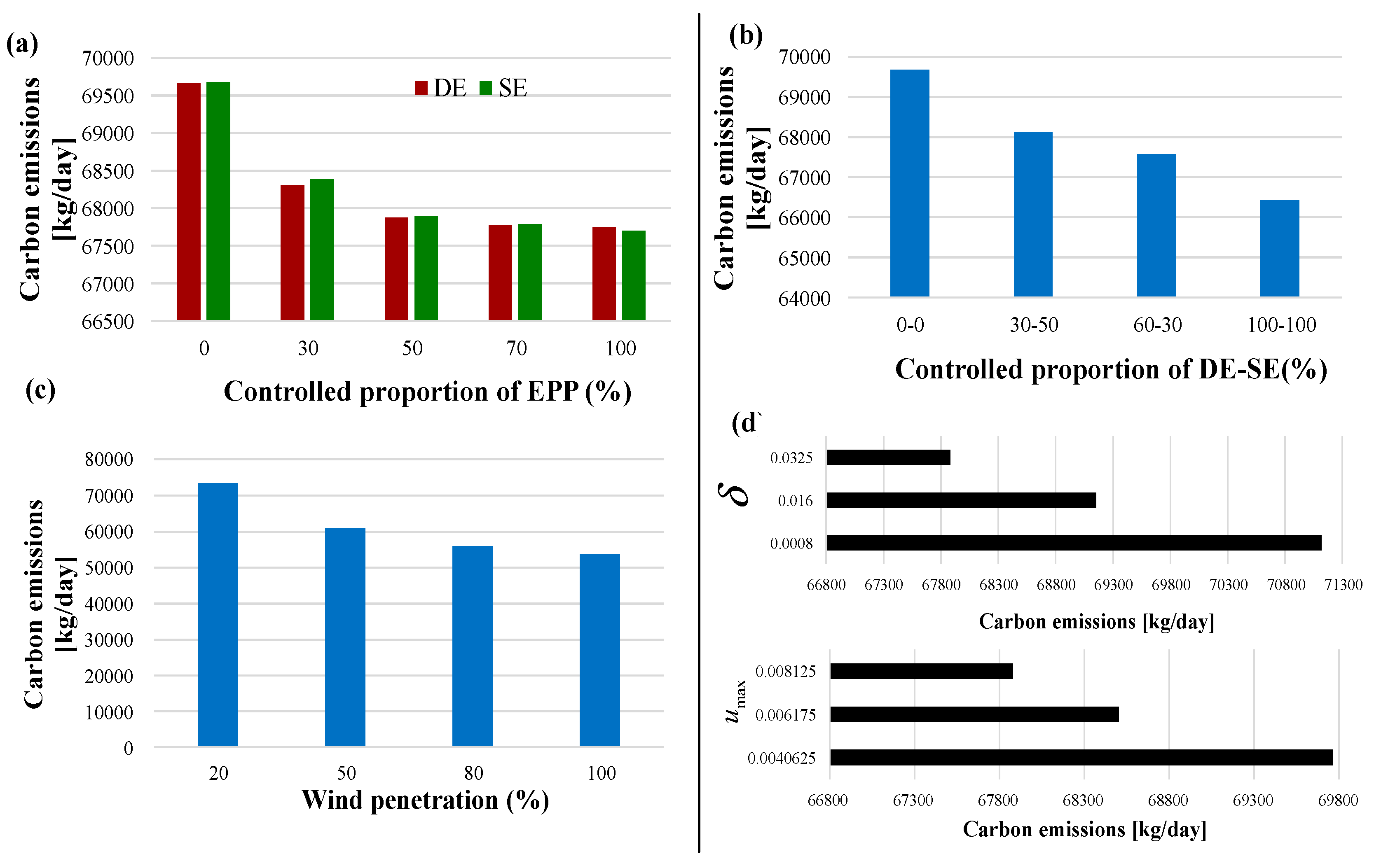
Similar effects can be achieved in scenario B with respect to reserve dispatch and generation plants output power. With the controlled proportion of SE increased, more wind energy can be absorbed by SE to some extent, resulting in the variation of wind dispatch factors. In addition, compared to the uncontrolled case, carbon emissions are reduced by 1913 kg and 1980 kg per day in scenario A and scenario B as illustrated in
Figure 16, respectively, showing the environmental benefits of employing the proposed control strategy.
In scenario C, as rendered in
Figure 12b, with more DE and SE controlled, the TGP reserve decreases further, to approximately 1182 WM per day; the explanation is clear considering the reserve in the last two scenarios. Taking the controlled situation with a 100% DE and 100% SE participating in the aggregated DR for example, the daily electricity from the TGP is reduced by 202 MW per day while that of the LGP increases by 215 MW. Meanwhile, there is a change in wind power dispatch compared to that in the uncontrolled case (see
Figure 14c). There is also a 3300 kg per day decrease in carbon emissions, indicating the changes in the control proportion have a significant impact on reducing the carbon emissions (see
Figure 16b). These carbon emissions impacts are a result of (1) the increase of control proportion of DE and SE, which decrease the electricity from the TGP, and (2) much of the reserve is provided by the electrolyzer-based EPP, thus reducing the TGP output.
4.3. Case-3: Impacts from Increasing Wind Penetration
In this case, the wind penetration ranges from 20% to 100%. Under some conditions when is over the 30% limit, in Equation (20), which accounts for the wind power curtailment, is adopted. The controlled electrolyzers are located on the demand side with a controlled proportion of 80%. The related parameters, as well as conventional power plants constraints are the same as those in Case-1.
As the wind penetration level increases, the TGP reserve decreases by 756 WM per day while the LGP reserve increases by 369 WM when
ranges from 20% to 100%, as illustrated in
Figure 12c. Due to the fixed response scale of the DE, the virtual reserve is limited. With increasing penetration of wind energy, the LGP reserve increases to reduce the wind curtailment. Similarly, the TGP and LGP output power decrease due to wind integration. Specifically, the TGP output power is reduced by 1185 MW per day while that from the LGP is reduced by 1844 MW when
reaches 100% (see
Figure 13d).
As shown in
Figure 14d, with an increase in wind penetration, the amount of wind power transferred to the DE rises in both the controlled (C) and uncontrolled (U) scenarios due to the curtailed wind punishment. The consumption of the DE is inherent and fixed in the uncontrolled scenario; in contrast, with the employment of the OESR control strategy, the enhanced potential regulation ability of DE-EPP facilitates the mitigation of wind fluctuation.
However, due to the upper and lower boundary limitation of DE-EPP in the controlled scenario, there is still some wind that cannot be absorbed, especially when the wind penetration level exceeds 50%, as detailed in
Table 3. Taking the 100% wind penetration controlled case as an example, compared to the uncontrolled case, the curtailed ratio is reduced by 5.27% and
$179.9 wind curtailment cost per day can be avoided. The enhancement of DE controllability makes (
) in Equation (31) increase, thus the limit of
integration is extended.
As shown in
Figure 16c, the increase in wind penetration results in fewer carbon emissions from the TGP and LGP. When
increases from 20% to 100%, the decrease in carbon emissions is approximately 19.7 t per day. The results show that the implementation of DE promotes the wind energy integration, and the application of the proposed control strategy is conducive to reducing carbon emissions.
4.4. Case-4: Impacts of Demand Response Parameter Changes
Apart from the control state of electrolyzers and wind integration factor, the selection of appropriate parameters is also crucial for the effect of the control strategy. In order to obtain the appropriate parameters, two scenarios are studied in this case, showing the impacts of parameter changes on the DR control strategy.
In scenario A, the value of the deadband
is assumed to be varied. Three typical values are set to explore the effect,
,
and
(the typical value of
is 0.0325). In scenario B, the value of
is changed. Three typical values are set,
,
,
(the typical
is 0.25). The description of the deadband and
are provided in
Section 2. For this case, only 50% of the DE is controlled. The level of wind penetration is the same as in Case-1.
As seen in the subplot (d) of
Figure 12,
Figure 13 and
Figure 16, the TGP reserve decreases by approximately 103 MW per day comparing the value of the deadband
and
; concurrently, the power output from the TGP decreases and that from the LGP increases. In addition, the performance towards reducing carbon emissions is better achieved when the value
is selected. The explanation for these changes is that as
increases, the responsive range becomes wider, thus providing a larger reserve capacity. The results also indicate that a reasonable deadband is significant to control effects, the energy operators should define
according to the actual target and end user requested comfort.
In scenario B, as shown in
Figure 12d, with an increasing
, the reserves of TGP and LGP total decrease and the DE reserve increases. Moreover, as shown in
Figure 16d, the carbon emissions also decrease by about 1883 kg per day. As the value of
gets larger, the controllable boundary is extended. However, the reserve capacity supplied by the TGP and LGP decreases due to the replacement with the DE virtual reserve capacity. The result demonstrates that the value of
is crucial for determining an OESR
in the control strategy, and thus it can significantly influence the results. To achieve better results, the definition of
should be a little more than
, according to Equation (13).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















