
An Improved LCL Filter Design in Order to Ensure Stability without Damping and Despite Large Grid Impedance Variations



Abstract
:1. Introduction
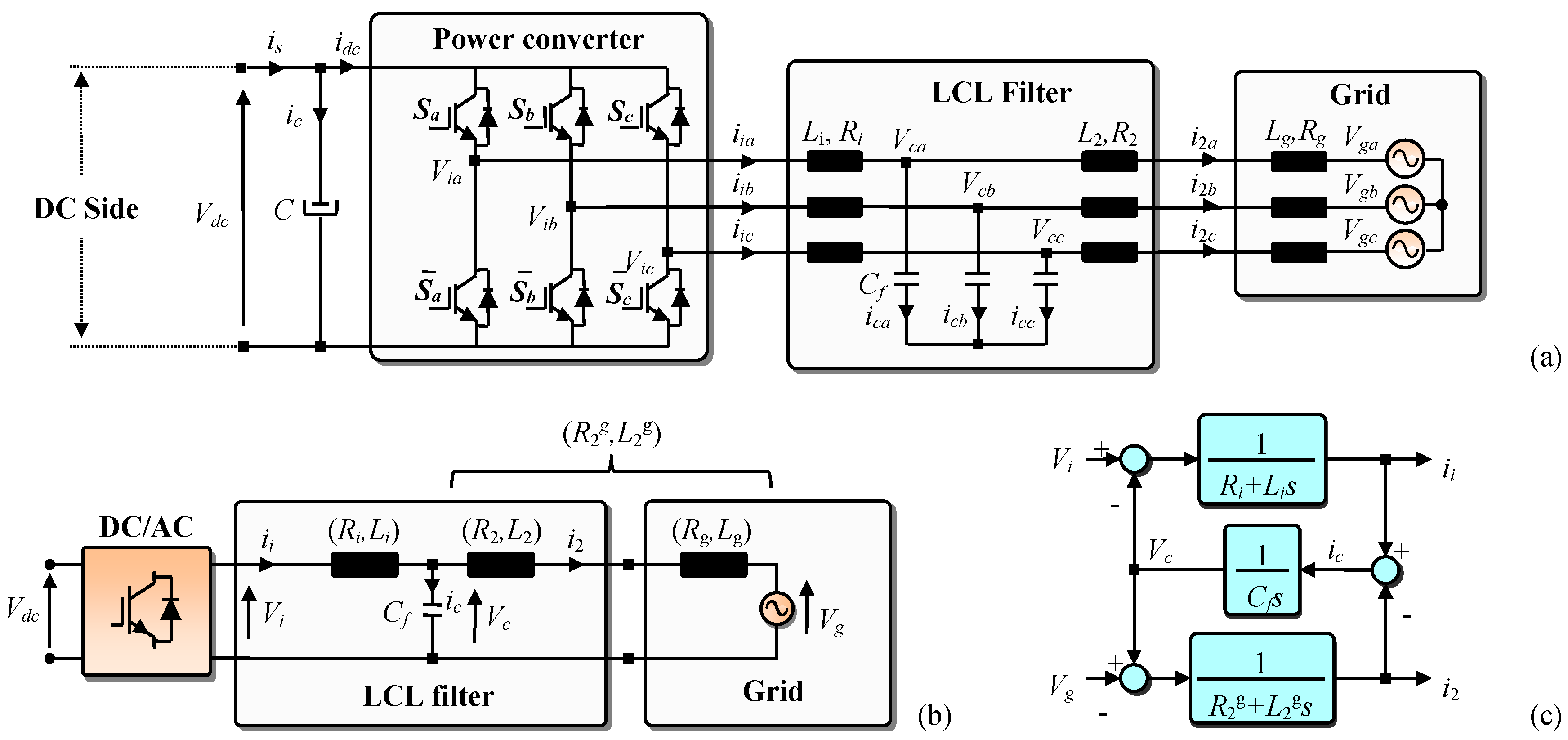
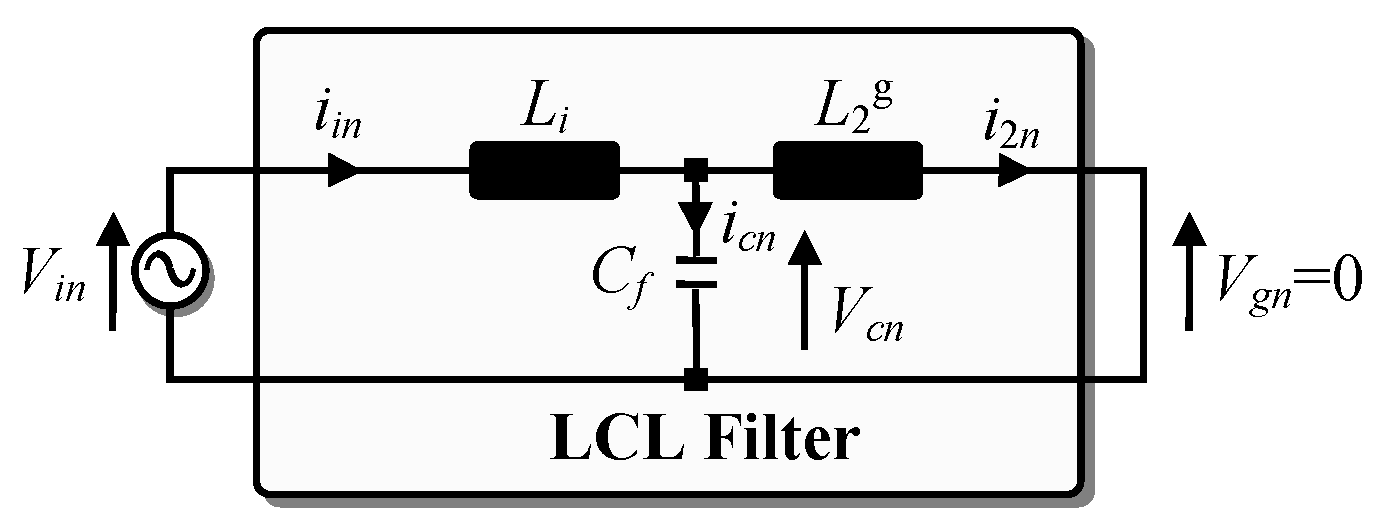
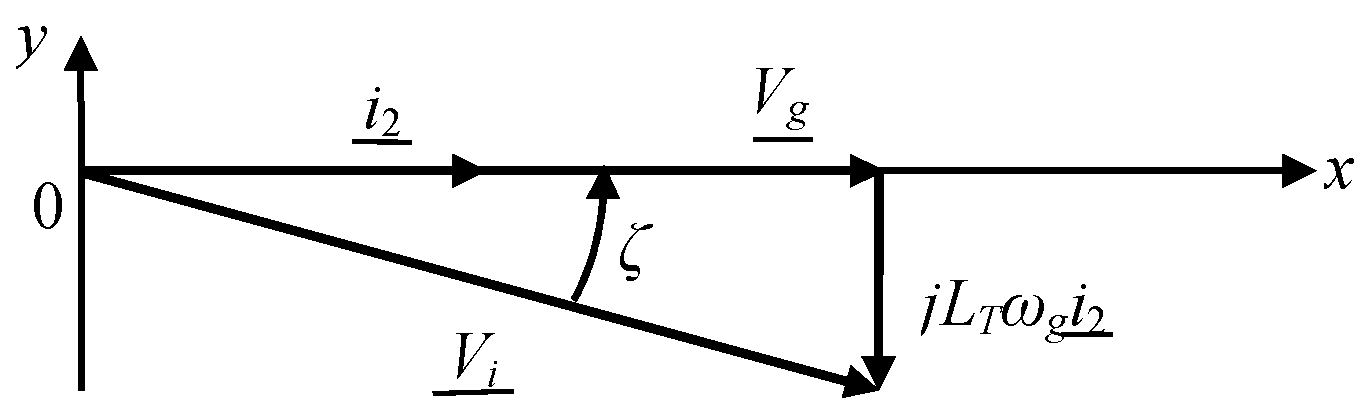
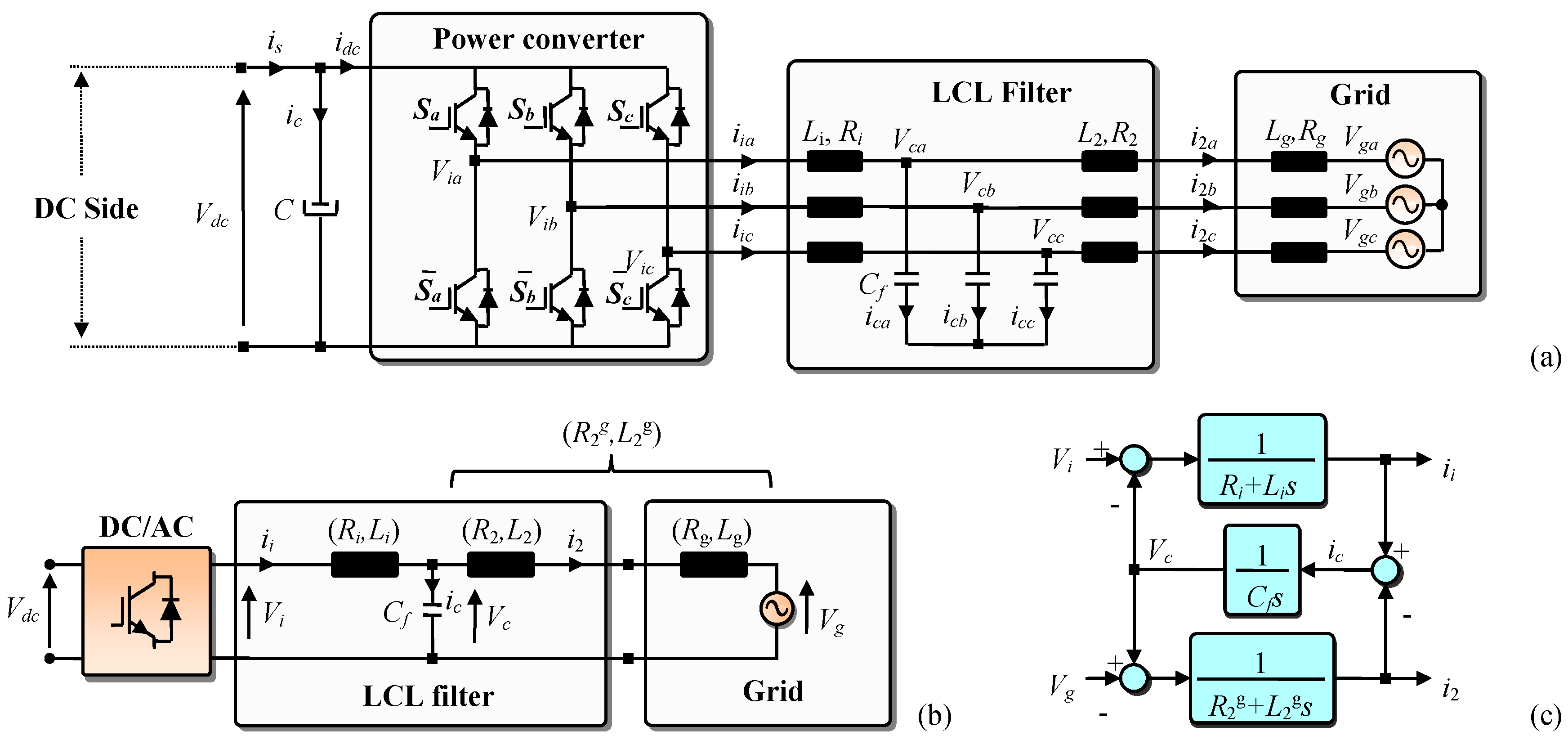
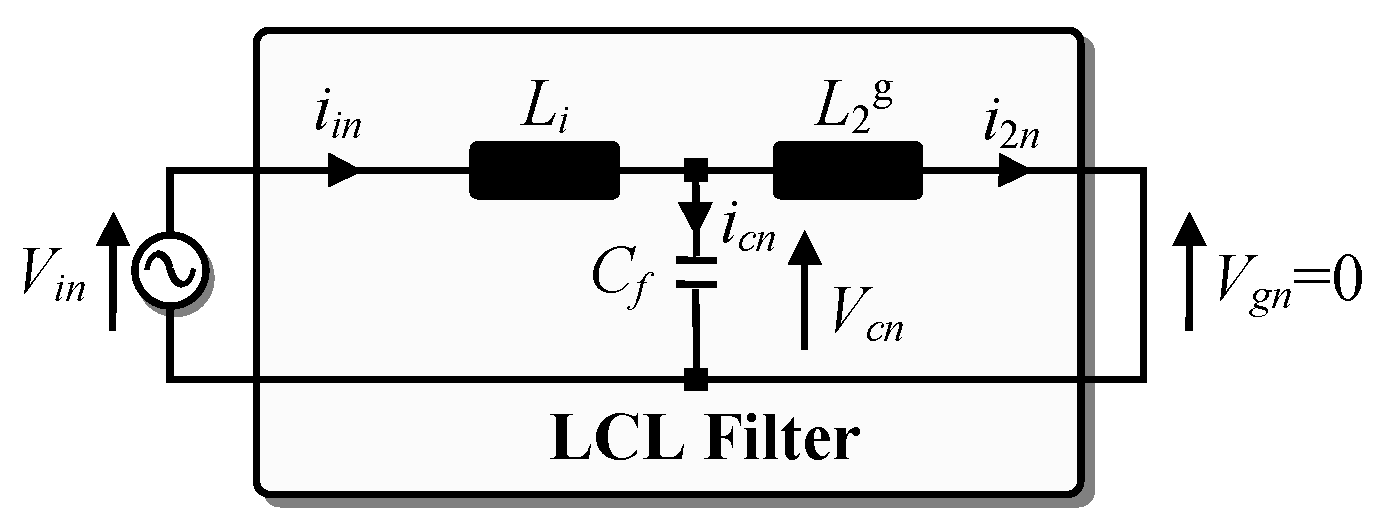
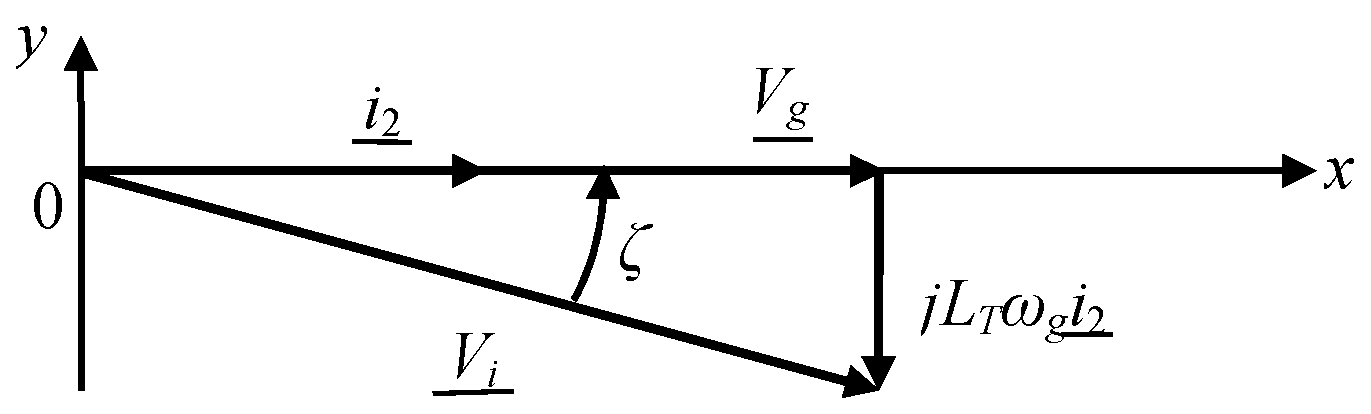
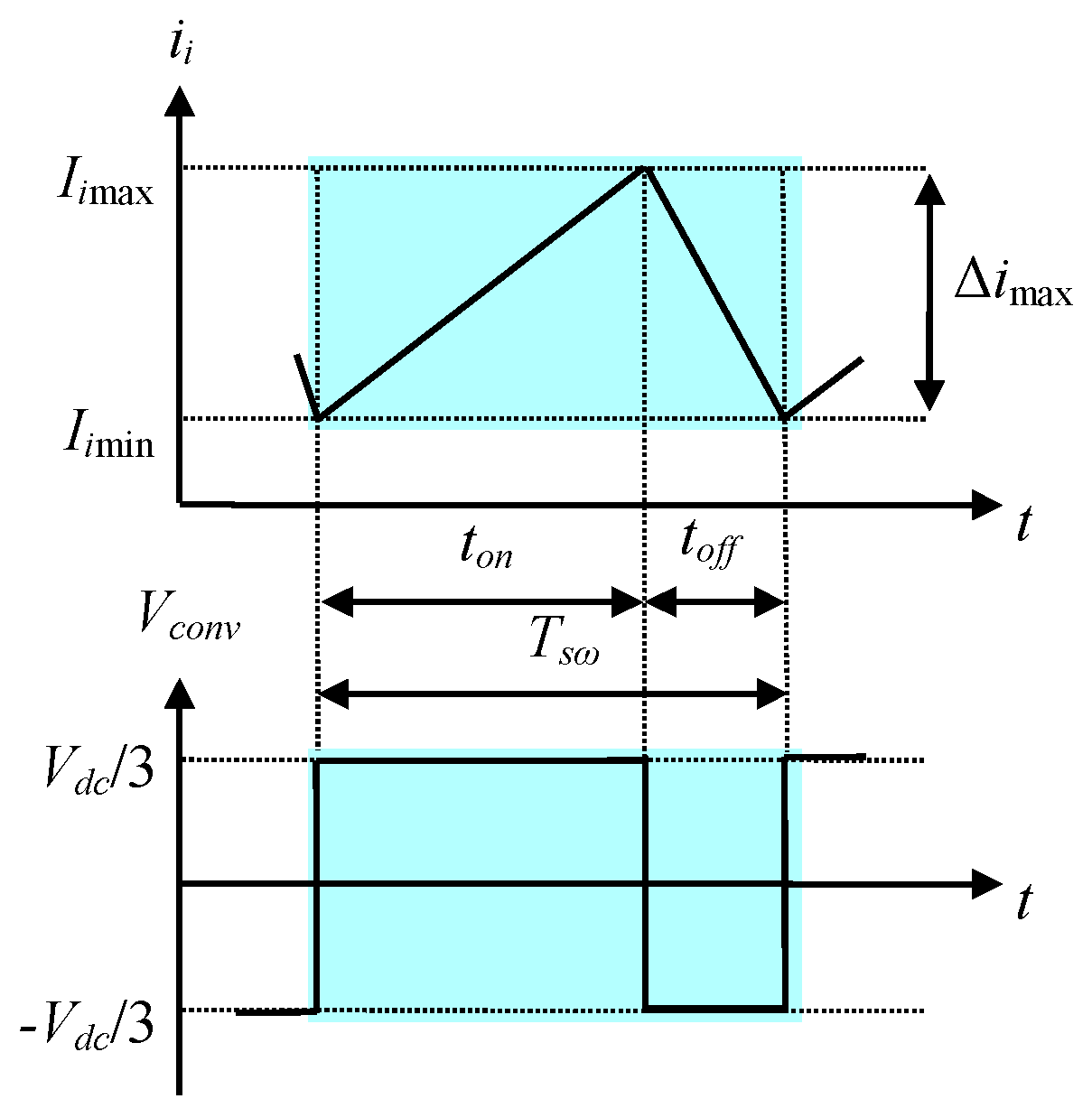
2. LCL Filter Mathematical Model
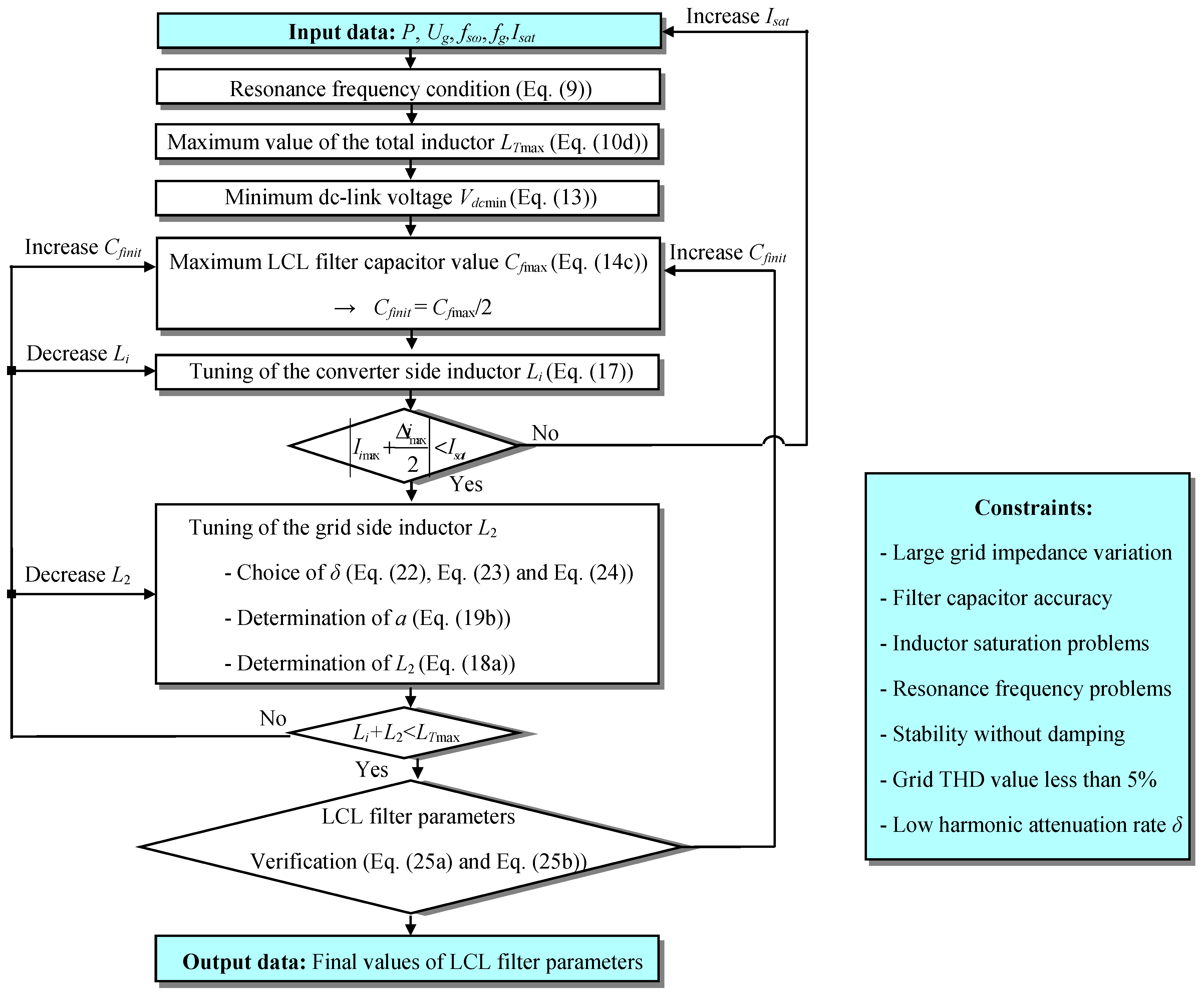
3. LCL Filter Design Methodology
- -
- The line-to-line RMS grid voltage Ug;
- -
- The rated active power of the system P;
- -
- The rated frequency of grid voltage fg;
- -
- The switching frequency of the converter fsω;
- -
- The saturation current of the LCL filter inductors Isat.
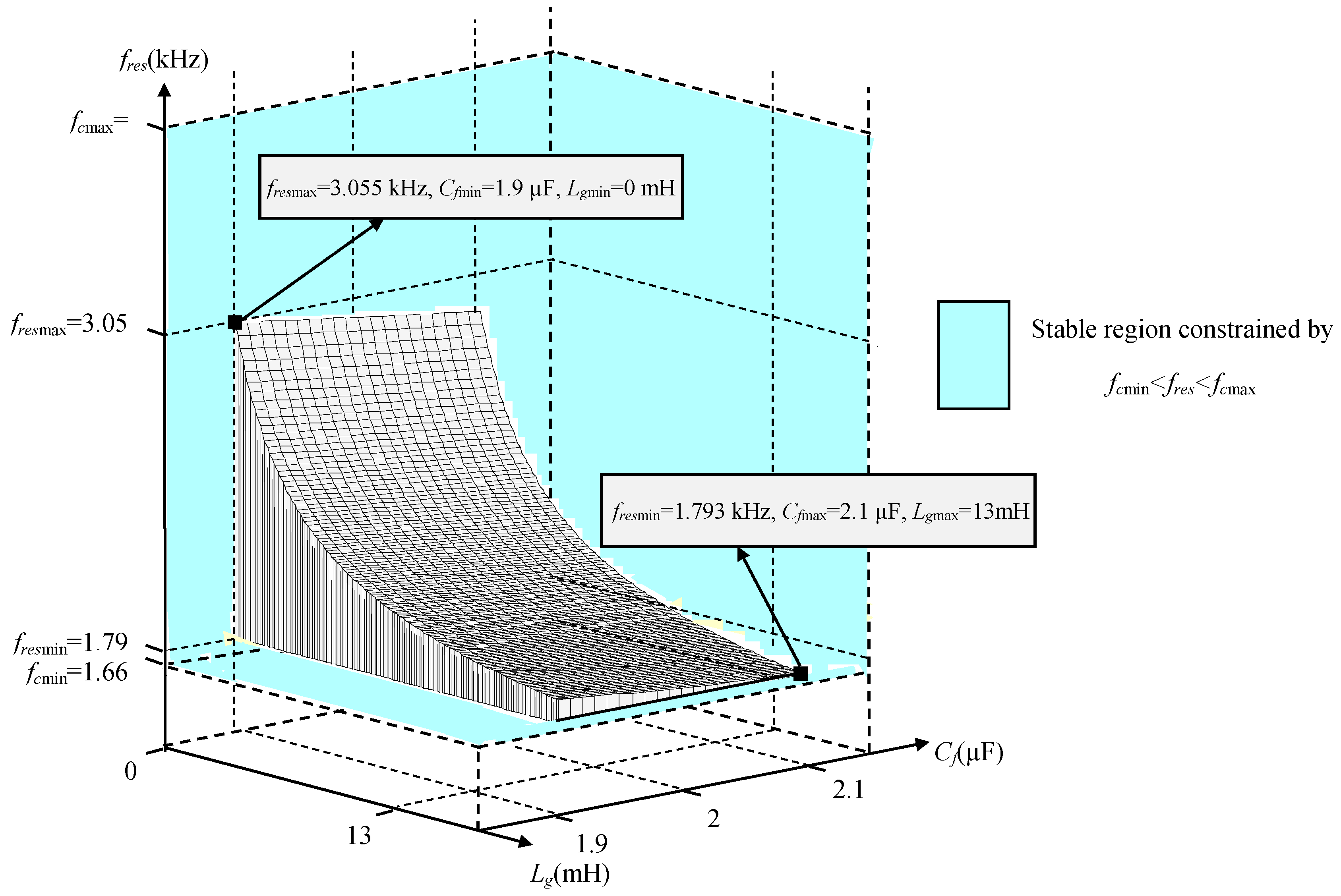
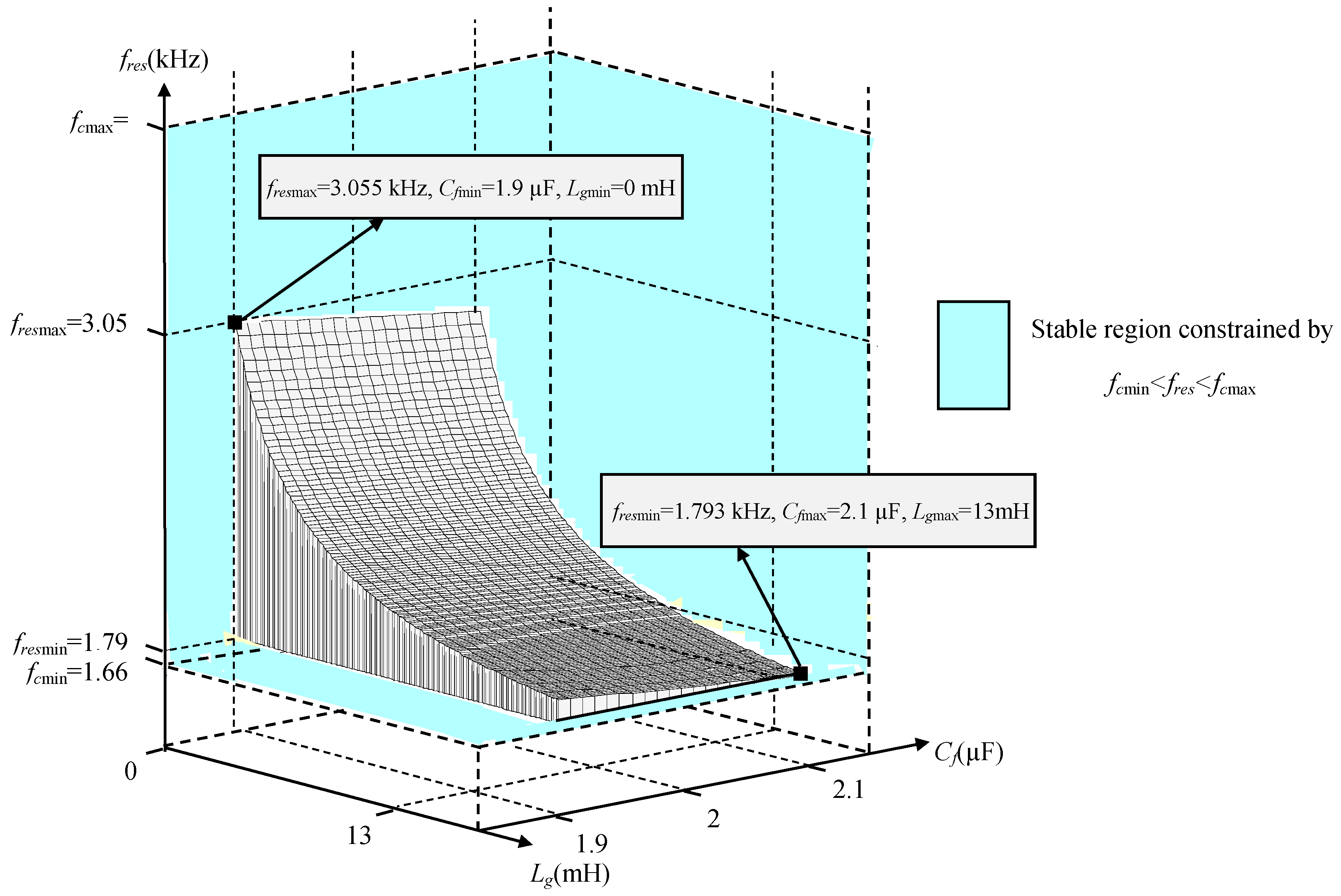
3.1. Resonance Frequency Condition
- -
- The filter inductors Li and L2;
- -
- The grid inductor Lg;
- -
- The filter capacitor Cf.
3.2. Maximum Value of the Total Inductor
3.3. Minimum DC-Link Voltage
3.4. Maximum LCL Filter Capacitor Value
3.5. Tuning of the Converter Side Inductor
3.6. Tuning of the Grid Side Inductor
3.7. LCL Filter Parameter Verification
Algorithm of the LCL filter design methodology
4. Case Study for LCL Filter Design
4.1. Application Design Methodology
- -
- Maximum value of the total inductor LTmax
- -
- Minimum DC-link voltage Vdcmin
- -
- Maximum LCL filter capacitor value Cfmax
- -
- Tuning of the converter side inductor Li
- -
- Tuning of the grid side inductor L2
- -
- Resonance frequency
4.2. Simulation Results
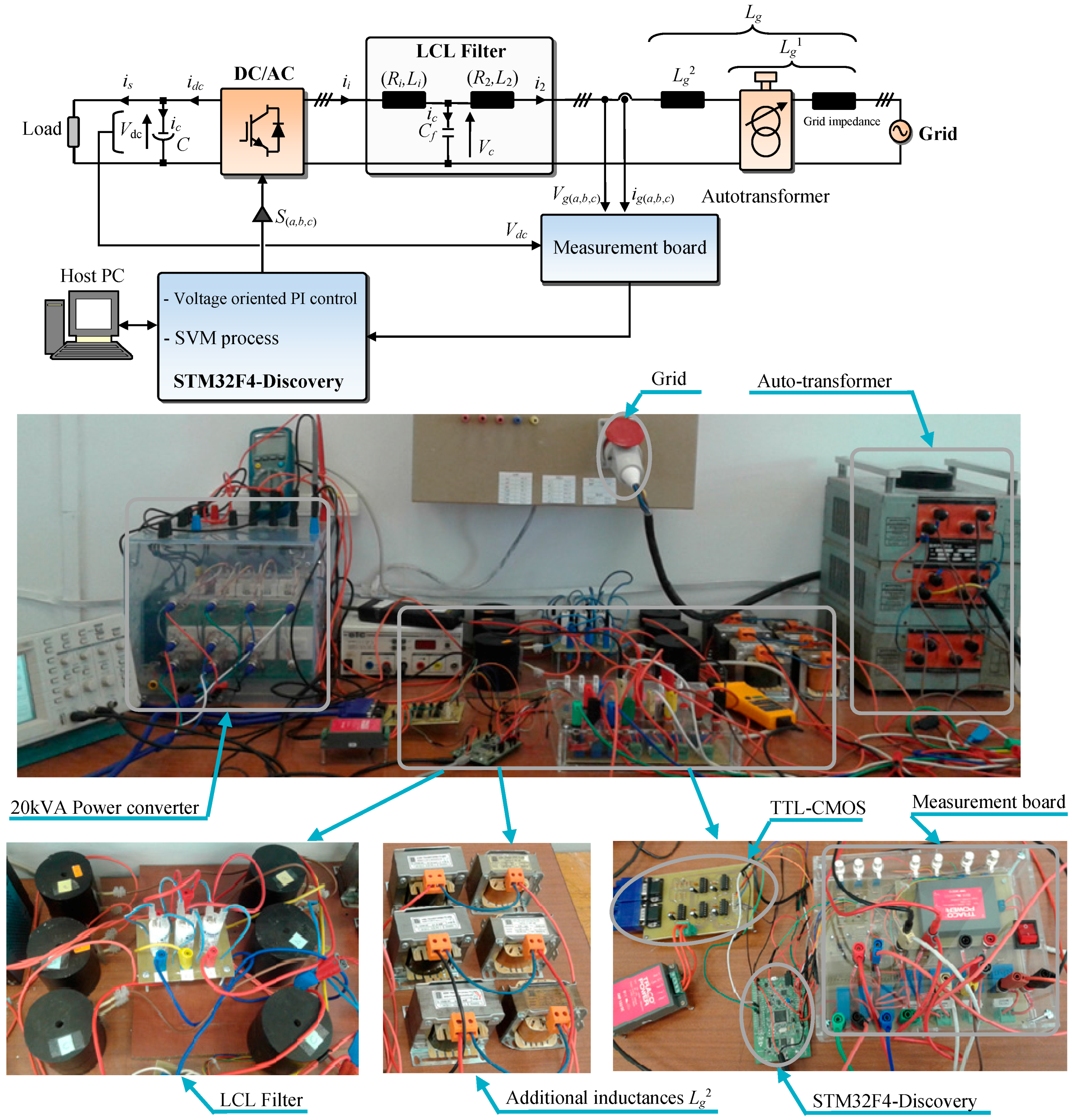
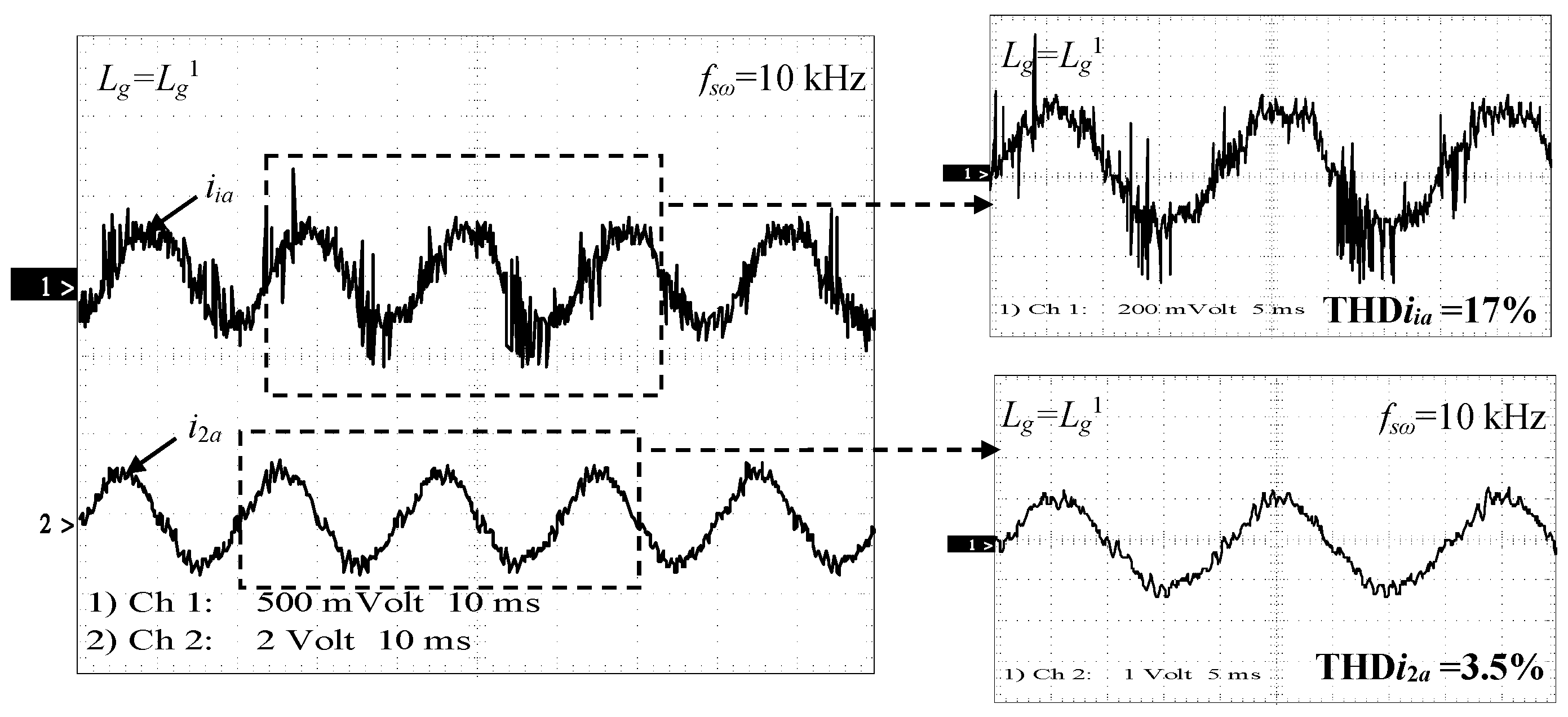
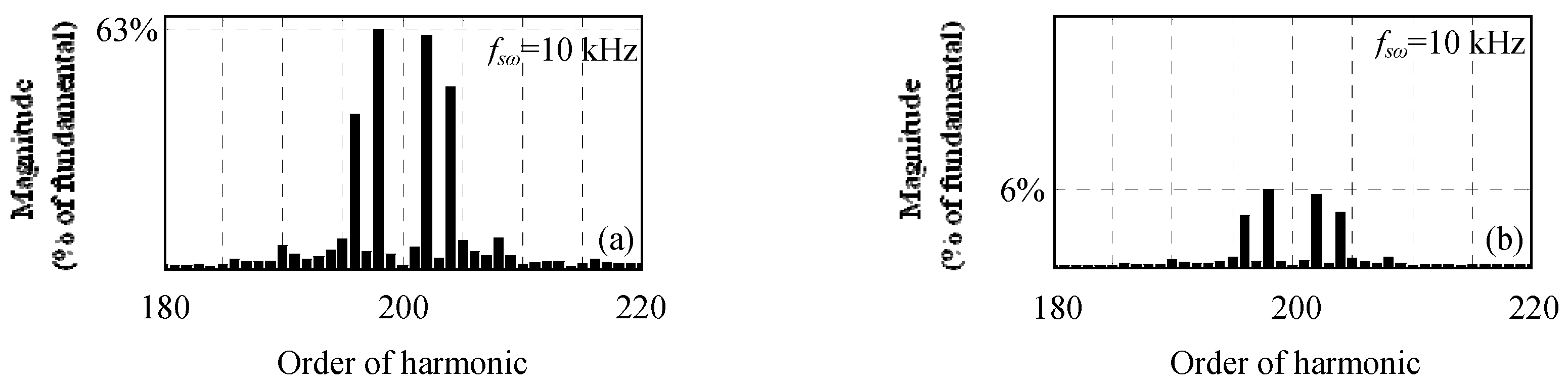
5. Experimental Results
- -
- A 20 kVA three phase high voltage power converter.
- -
- An auto transformer that varies the voltage peak magnitude (in the AC side).
- -
- An LCL filter (composed of three inductors (5 mH/10 A) with an internal resistor of 0.1 Ω, three capacitors (2 µF/400 V) and three inductors (2 mH/10 A) with an internal resistor of 0.1 Ω).
- -
- A capacitor for the dc-link (1100 μF/800 V).
- -
- Measurement board that provides current and voltage measurements.
- -
- Three inductors (4.5 mH/10 A) used in order to emulate the large grid impedance variation.
- -
- The STM32F4-Discovery digital solution, which is used for the implementation of the control algorithm.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liserre, M.; Sauter, T.; Hung, J.Y. Future energy systems: Integrating renewable energy sources into the smart power grid through industrial electronics. IEEE Trans. Ind. Electron. Mag. 2010, 4, 18–37. [Google Scholar] [CrossRef]
- Roy, N.K.; Pota, H.R. Current status and issues of concern for the integration of distributed generation into electricity networks. IEEE Syst. J. 2015, 9, 933–944. [Google Scholar] [CrossRef]
- Tsili, M.; Papathanassiou, S. A review of grid code technical requirements for wind farms. IET Renew. Power Gener. 2009, 3, 308–332. [Google Scholar] [CrossRef]
- Cracium, B.I.; Kerekes, T.; Sera, D.; Teodorescu, R. Overview of recent grid codes for PV power integration. In Proceedings of the 13th International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Brasov, Romania, 24–26 May 2012; pp. 959–965.
- Lettl, J.; Bauer, J.; Linhart, L. Comparison of different filter types for grid connected inverter. In Proceedings of the 29th Progress in Electromagnetics Research Symposium (PIERS 2011), Marrakesh, Morocco, 20–23 March 2011; pp. 1426–1429.
- Elsaharty, M.A.; Ashour, H.A. Passive L and LCL filter design method for grid-connected inverters. In Proceedings of the 2014 IEEE Conference in Innovative Smart Grid Technologies, Kuala Lumpur, Malaysia, 20–23 May 2014; pp. 13–18.
- Fu, X.; Li, S. A Novel Neural Network Vector Control for Single-Phase Grid-Connected Converters with L, LC and LCL Filters. Energies 2016, 9, 328. [Google Scholar] [CrossRef]
- Cao, W.; Liu, K.; Ji, Y.; Wang, Y.; Zhao, J. Design of a Four-Branch LCL-Type Grid-Connecting Interface for a Three-Phase, Four-Leg Active Power Filter. Energies 2015, 8, 1606–1627. [Google Scholar] [CrossRef]
- Liserre, M.; Blaabjerg, F.; Hansen, S. Design and control of an LCL-filter-based three-phase active rectifier. IEEE Trans. Ind. Appl. 2005, 41, 1281–1291. [Google Scholar] [CrossRef]
- Popescu, M.; Bitoleanu, A.; Preda, A. A new design method of an LCL filter in active dc-traction substations. In Proceedings of the 2016 IEEE International Power Electronics and Motion Control Conference, Varna, Bulgaria, 25–28 September 2016; pp. 876–881.
- Park, M.; Chi, M.; Park, J.; Kim, H.; Chun, T.; Nho, E. LCL-filter design for grid connected PCS using total harmonic distortion and ripple attenuation factor. In Proceedings of the 2010 IEEE International Conference on Power Electronics Conference, Sapporo, Japan, 21–24 June 2010; pp. 1688–1694.
- Wu, Z.; Aldeen, M.; Saha, S. A novel optimization method for the design of LCL filters for three-phase grid-tied inverters. In Proceedings of the 2016 IEEE Innovative Smart Grid Technologies, Melbourne, Australia, 28 November–1 December 2016; pp. 214–220.
- Tang, Y.; Yao, W.; Loh, P.C.; Blaabjerg, F. Design of LCL filters with LCL resonance frequencies beyond the nyquist frequency for grid-connected converters. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 3–14. [Google Scholar] [CrossRef]
- Yanga, J.; Lee, F.C. LCL filter design and inductor current ripple analysis for a three-level NPC grid interface converter. IEEE Trans. Power. Electron. 2015, 30, 4659–4668. [Google Scholar]
- Jayalath, S.; Hanif, M. Generalized LCL-Filer Design Algorithm for Grid-connected Voltage Source Inverter. IEEE Trans. Ind. Electron. 2017, 64, 1905–1915. [Google Scholar] [CrossRef]
- Park, K.B.; Kieferndorf, F.; Drofenik, U.; Pettersson, S.; Canales, F. Weight Minimization of LCL Filters for High Power Converters. IEEE Trans. Ind. Appl. 2017. [Google Scholar] [CrossRef]
- Pan, D.; Ruan, X.; Bao, C.; Li, W.; Wang, X. Optimized controller design for LCL-type grid-connected inverter to achieve high robustness against grid-impedance variation. IEEE Trans. Ind. Electron. 2014, 62, 1537–1547. [Google Scholar] [CrossRef]
- Klaus, H.; Klaus-Dieter, D. Elektrische Engergieversorgung, 3rd ed.; Vieweg: Braunschweig, Germany, 2010. [Google Scholar]
- Xu, J.; Xie, S.; Tang, T. Improved control strategy with grid-voltage feedforward for LCL-filter-based inverter connected to weak grid. IET Power Electron. 2014, 7, 2660–2671. [Google Scholar] [CrossRef]
- He, J.; Wei Li, Y.; Bosnjak, D.; Harris, B. Investigation and active damping of multiple resonances in a parallel-inverter-based microgrid. IEEE Trans. Power Electron. 2012, 28, 234–246. [Google Scholar] [CrossRef]
- Cehn, C.; Xiong, J.; Lei, J.; Zhang, K. Time delay compensation method based on area equivalence for active damping of LCL-type converter. IEEE Trans. Power Electron. 2016, 32, 762–772. [Google Scholar]
- Wang, X.; Blaabjerg, F.; Chiang Loh, P. Grid-current-feedback active damping for LCL resonance in grid-connected voltage-source converters. IEEE Trans. Power Electron. 2016, 31, 213–223. [Google Scholar] [CrossRef]
- Yao, W.; Yang, Y.; Xiaobin, Z.; Blaabjerg, F.; Loh, P.C. Design and Analysis of Robust Active Damping for LCL Filters Using Digital Notch Filters. IEEE Trans. Power Electron. 2017, 32, 2360–2375. [Google Scholar] [CrossRef]
- Ben Said-Romdhane, M.; Naouar, M.W.; Slama-Blkhodja, I.; Monmasson, E. Robust Active Damping Methods for LCL Filter Based Grid Connected Converters. IEEE Trans. Power Electron. 2016. [Google Scholar] [CrossRef]
- Lorzadeh, I.; AskarianAbyaneh, H.; Savaghebi, M.; Bakhshai, A.; Guerrero, J.M. Capacitor Current Feedback-Based Active Resonance Damping Strategies for Digitally-Controlled Inductive-Capacitive-Inductive-Filtered Grid-Connected Inverters. Energies 2017, 9, 642. [Google Scholar] [CrossRef]
- Xin, Z.; Ching, P.; Wang, X.; Blaabjerg, F.; Tang, Y. Highly accurate derivatives for LCL-filtered grid converter with capacitor voltage active damping. IEEE Trans. Power Electron. 2016, 31, 3612–3625. [Google Scholar] [CrossRef]
- Hyo-Min, A.; Chang-Yeol, O.; Won-Yong, S.; Jung-Hoon, A.; Byoung-Kuk, L. Analysis and design of LCL filter with passive damping circuits for three-phase grid-connected inverters. In Proceedings of the 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia), Seoul, Korea, 1–5 June 2015; pp. 652–658.
- Xiongfei, W.; Beres, R.; Blaabjerg, F.; Poh, C. Passivity-based design of passive damping for LCL-filtered voltage source converters. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition, Montreal, QC, Canada, 20–24 September 2015; pp. 3718–3725.
- Beres, R.N.; Wang, X.; Blaabjerg, F.; Liserre, M.; Bak, C.L. Optimal Design of High-Order Passive-Damped Filters for Grid-Connected Applications. IEEE Trans. Power Electron. 2016, 31, 2083–2098. [Google Scholar] [CrossRef]
- Beres, R.N.; Wang, X.; Blaaberj, F.; Liserre, M.; Bak, C.L. Optimal design of High-order passive-damped filters for grid-connected applications. IEEE Trans. Power Electron. 2016, 31, 2083–2098. [Google Scholar] [CrossRef]
- Parker, S.G.; McGrath, B.P.; Holmes, D.G. Regions of active damping control for LCL filters. IEEE Trans. Ind. Appl. 2014, 50, 424–432. [Google Scholar] [CrossRef]
- Yi, T.; Changwoo, Y.; Rongwu, Z.; Blaabjerg, F. Generalized stability regions of current control for LCL-filtered grid-connected converters without passive or active damping. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition, Montreal, QC, Canada, 20–24 September 2015; pp. 2040–2047.
- Jianguo, W.; Jiu, D.Y.; Lin, J.; Jiyan, Z. Delay-dependent stability of single-loop controlled grid-connected inverters with LCL filters. IEEE Trans. Power Electron. 2016, 31, 743–757. [Google Scholar]
- Gohil, G.; Bede, L.; Teodorescu, R.; Kerekes, T.; Blaabjerg, F. Line Filter Design of Parallel Inverleaved VSCs for High-Power Wind Energy Conversion Systems. IEEE Trans. Power Electron. 2015, 30, 6775–6790. [Google Scholar] [CrossRef]
- Rockhill, A.A.; Liserre, M.; Teodorescu, R.; Rodriguez, P. Grid-Filter Design for a Multimegawatt Medium-Voltage Voltage-Source Inverter. IEEE Trans. Power Electron. 2011, 58, 1205–1216. [Google Scholar] [CrossRef]
- Ben Said-Romdhane, M.; Naouar, M.W.; Slama.Belkhodja, I.; Monmasson, E. Simple and systematic LCL filter design for three-phase grid-connected power converters. Math. Comput. Simul. 2016, 130, 181–193. [Google Scholar] [CrossRef]
- Ren, B.; Sun, X.; An, S.; Cao, X.; Zhang, Q. Analysis and Design of an LCL Filter for the Three-level Grid-connected Inverter. In Proceedings of the 7th International Conference on Power Electronics and Motion Control, Harbin, China, 2–5 June 2012; pp. 2023–2027.
- Sanatkar-Chayjani, M.; Monfared, M. Design of LCL and LLCL filters for single-phase grid connected converters. IET Power Electron. 2016, 9, 1971–1978. [Google Scholar] [CrossRef]
- 519-1992-IEEE Recommended Practices and Requirements for Harmonic Control in Electrical Power Systems; The Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 1993.
- Karimi-Ghartemani, M.; Khajehoddin, S.A.; Jain, P.; Bakhshai, A. A systematic approach to DC-Bus control design in single-phase grid-connected renewable converters. IEEE Trans. Power Electron. 2013, 28, 3158–3166. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| System | Ug | 400 V |
| P | 4 kW | |
| fsω | 10 kHz | |
| fg | 50 Hz | |
| Vdc | 600 V | |
| LCL filter | Cf | 2 µF |
| Li | 5 mH | |
| L2 | 2 mH | |
| PI controller | Kp | 2.4 |
| Ki | 592 | |
| Grid inductance | Lg | Lgmin = 0 mH and Lgmax = 13 mH |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Said-Romdhane, M.B.; Naouar, M.W.; Belkhodja, I.S.; Monmasson, E. An Improved LCL Filter Design in Order to Ensure Stability without Damping and Despite Large Grid Impedance Variations. Energies 2017, 10, 336. https://doi.org/10.3390/en10030336
Said-Romdhane MB, Naouar MW, Belkhodja IS, Monmasson E. An Improved LCL Filter Design in Order to Ensure Stability without Damping and Despite Large Grid Impedance Variations. Energies. 2017; 10(3):336. https://doi.org/10.3390/en10030336
Chicago/Turabian StyleSaid-Romdhane, Marwa Ben, Mohamed Wissem Naouar, Ilhem Slama Belkhodja, and Eric Monmasson. 2017. "An Improved LCL Filter Design in Order to Ensure Stability without Damping and Despite Large Grid Impedance Variations" Energies 10, no. 3: 336. https://doi.org/10.3390/en10030336
APA StyleSaid-Romdhane, M. B., Naouar, M. W., Belkhodja, I. S., & Monmasson, E. (2017). An Improved LCL Filter Design in Order to Ensure Stability without Damping and Despite Large Grid Impedance Variations. Energies, 10(3), 336. https://doi.org/10.3390/en10030336