Unified Brake Service by a Hierarchical Controller for Active Deceleration Control in an Electric and Automated Vehicle



Abstract
:1. Introduction
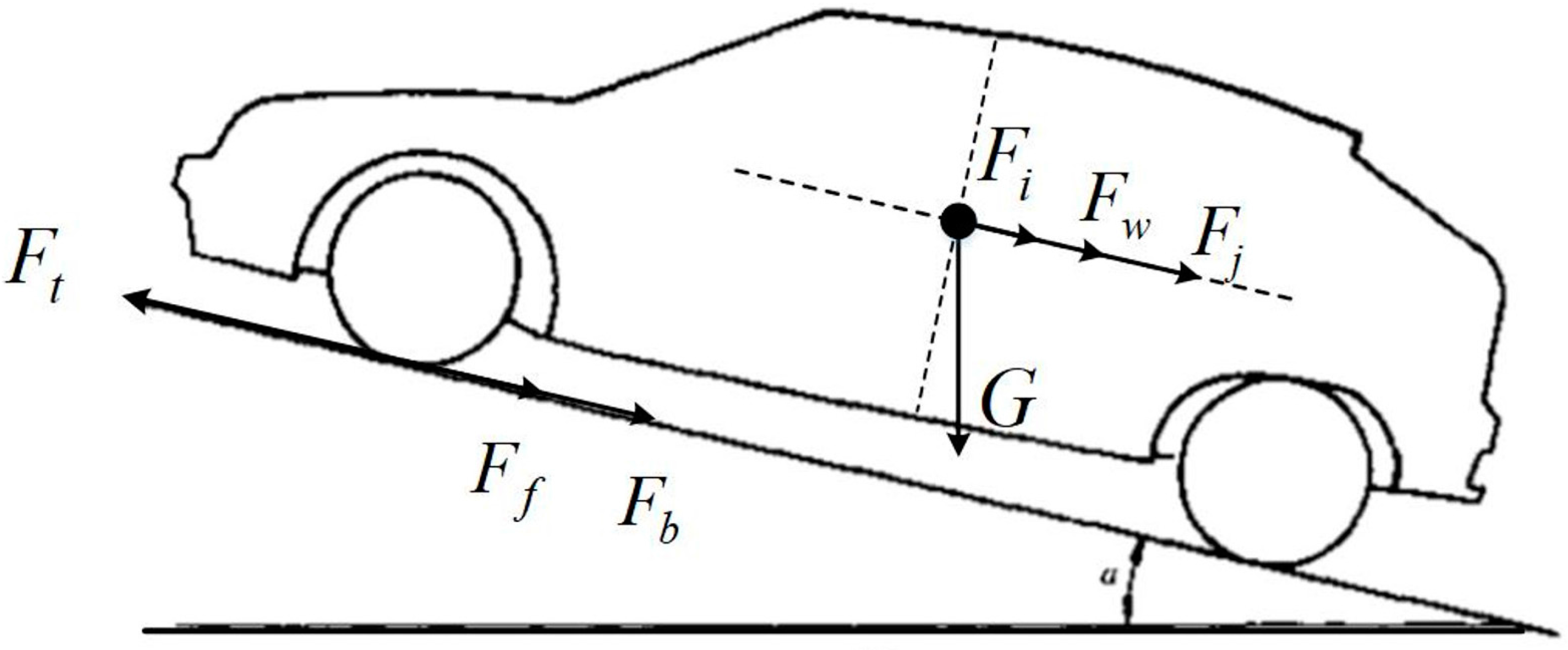
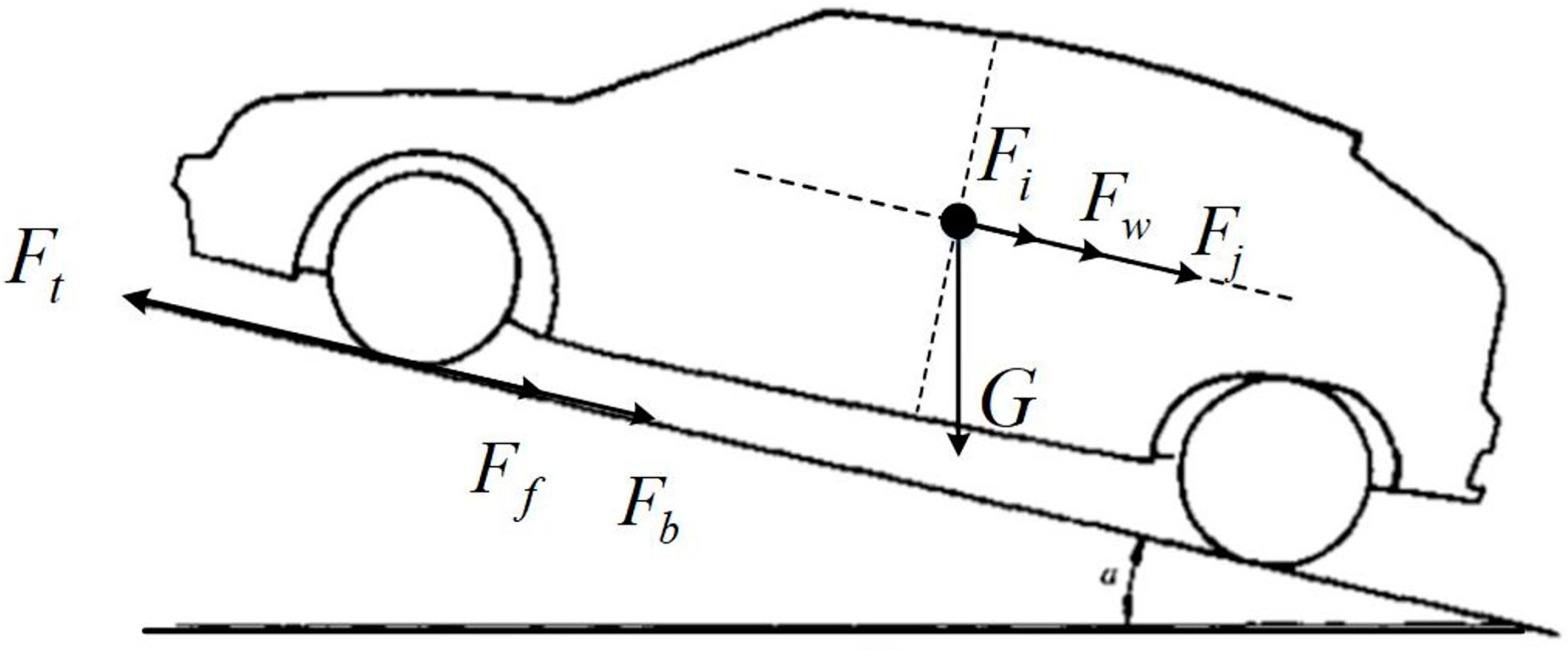
2. Dynamic Model of Electric Vehicle
3. Design of the Hierarchical Controller
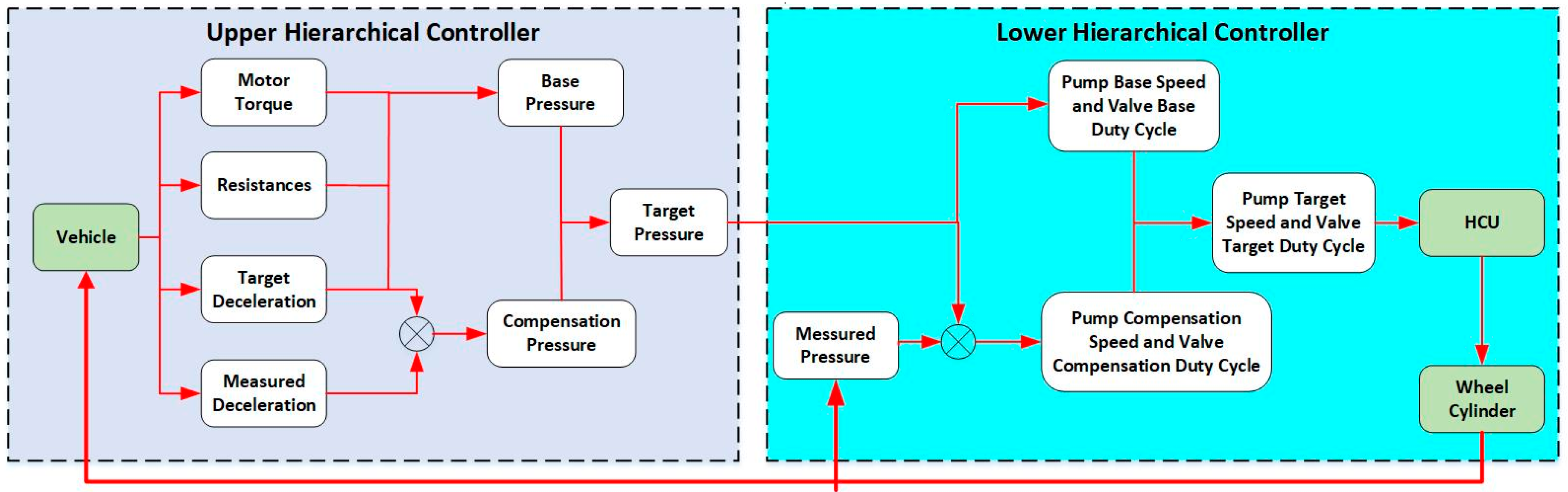
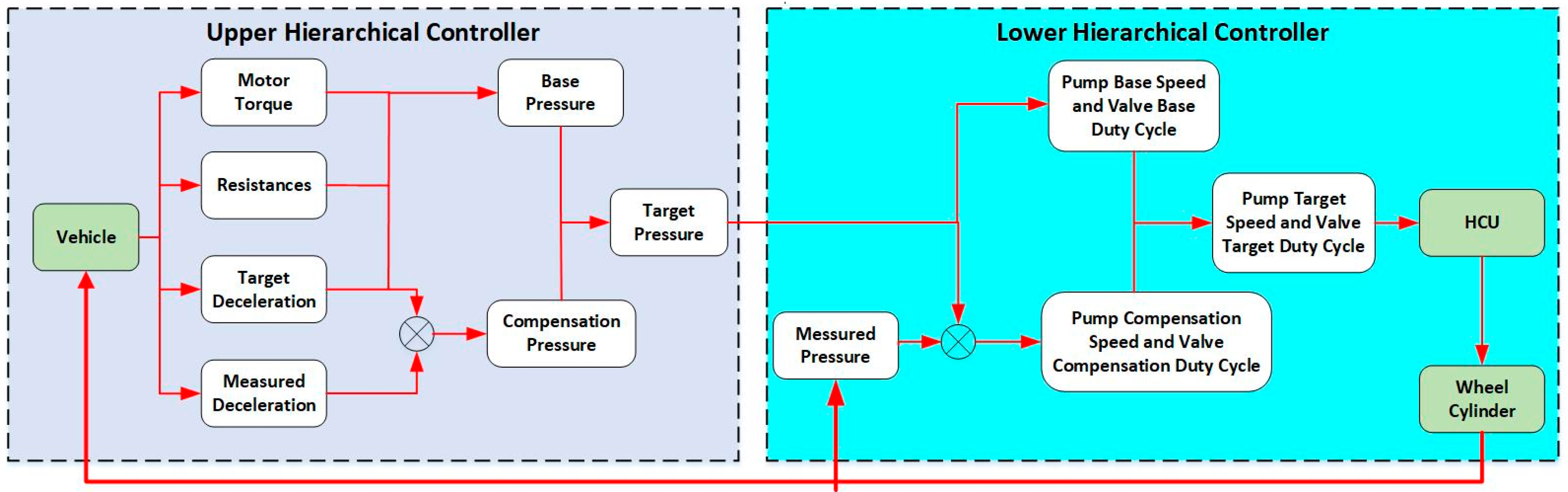
3.1. The Layout of the Whole Control Architecture
3.2. Design of Upper Hierarchical Controller
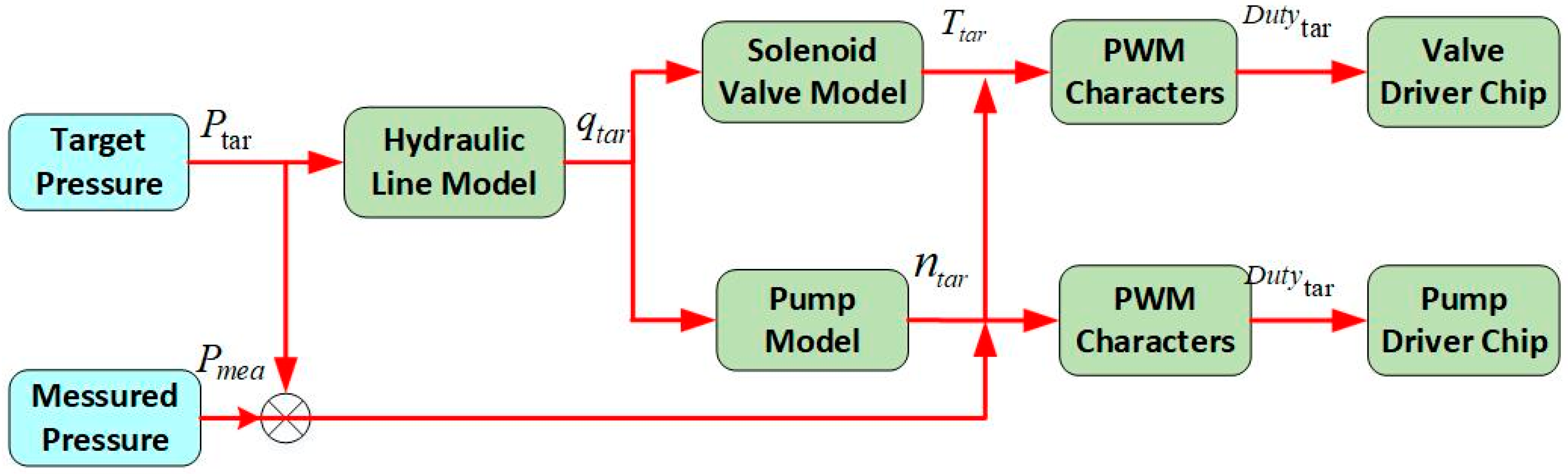
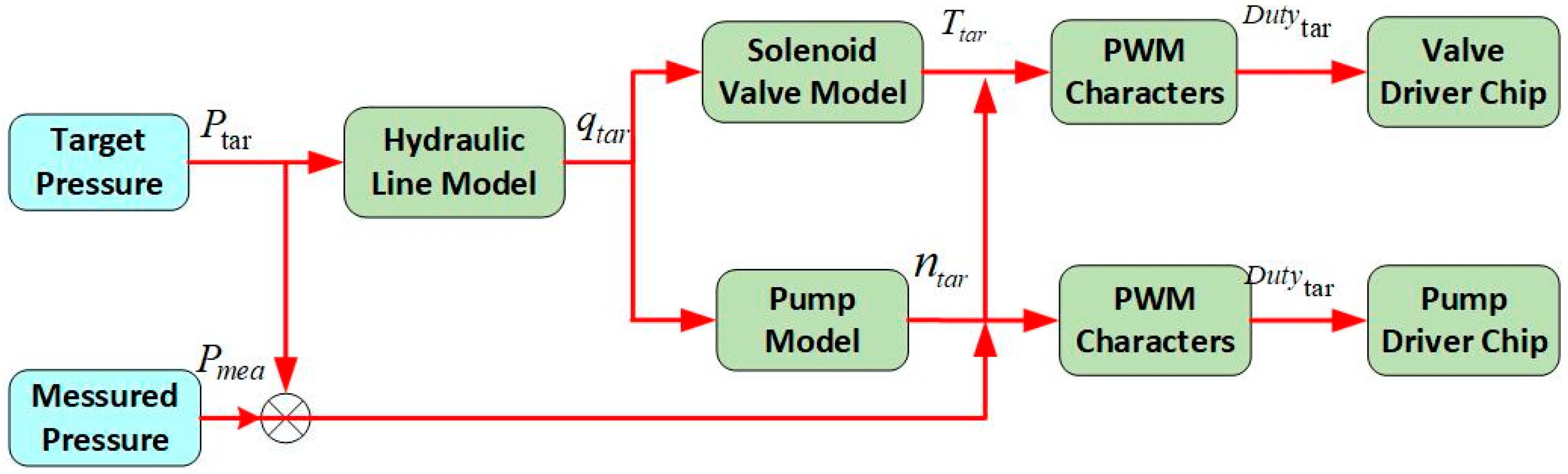
3.3. Design of Lower Hierarchical Controller
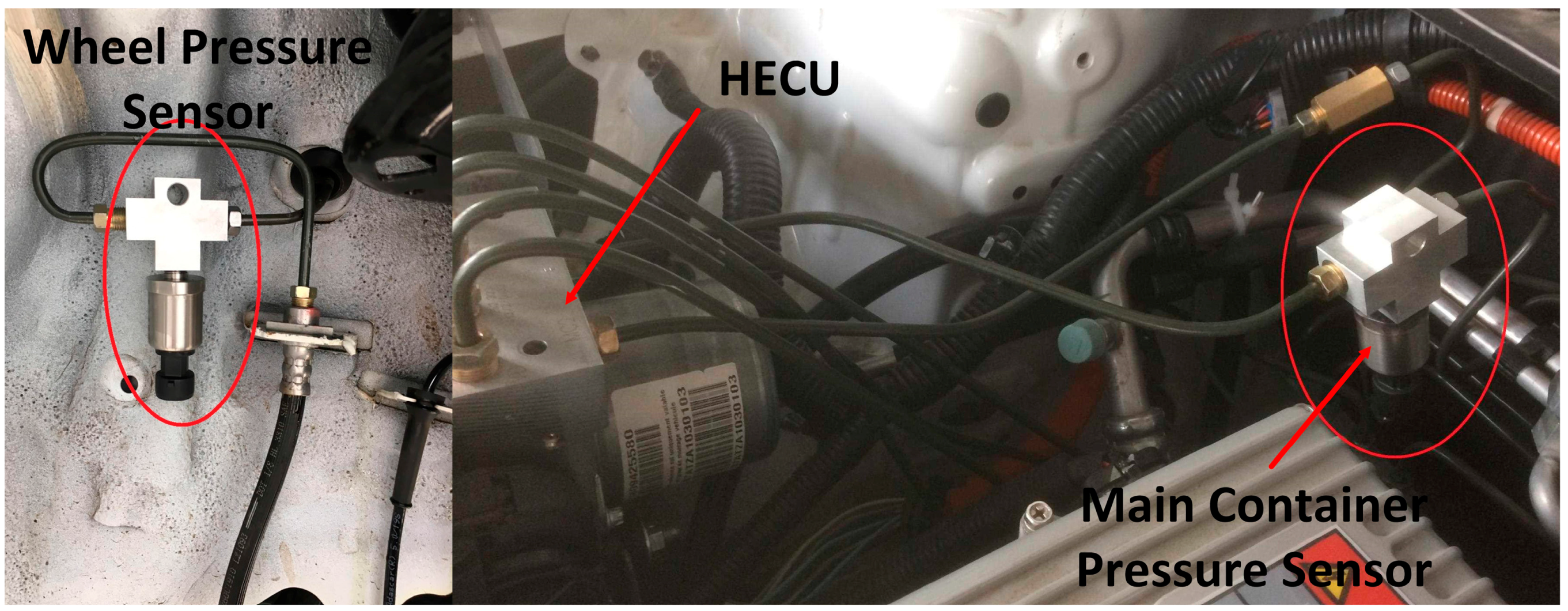
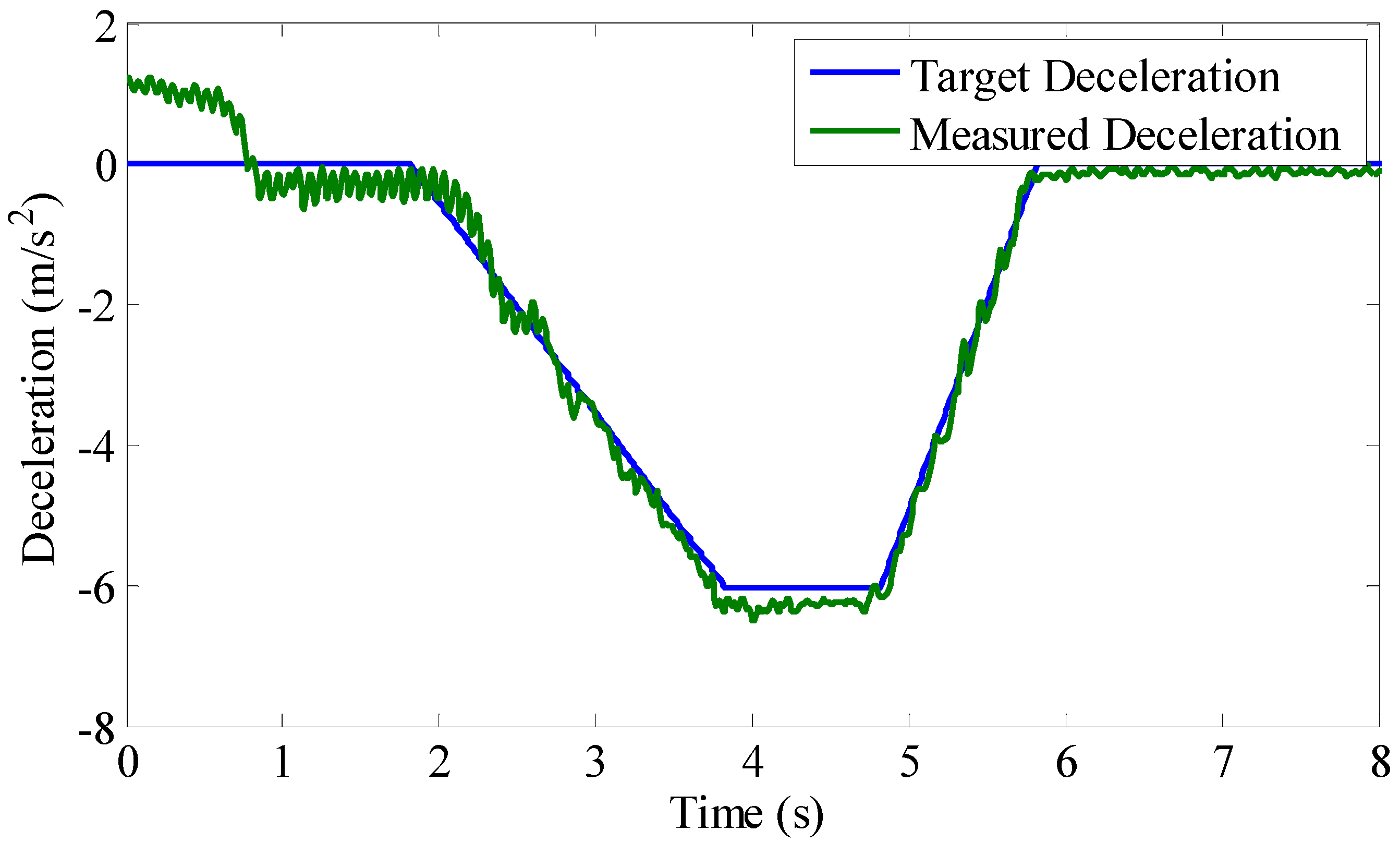
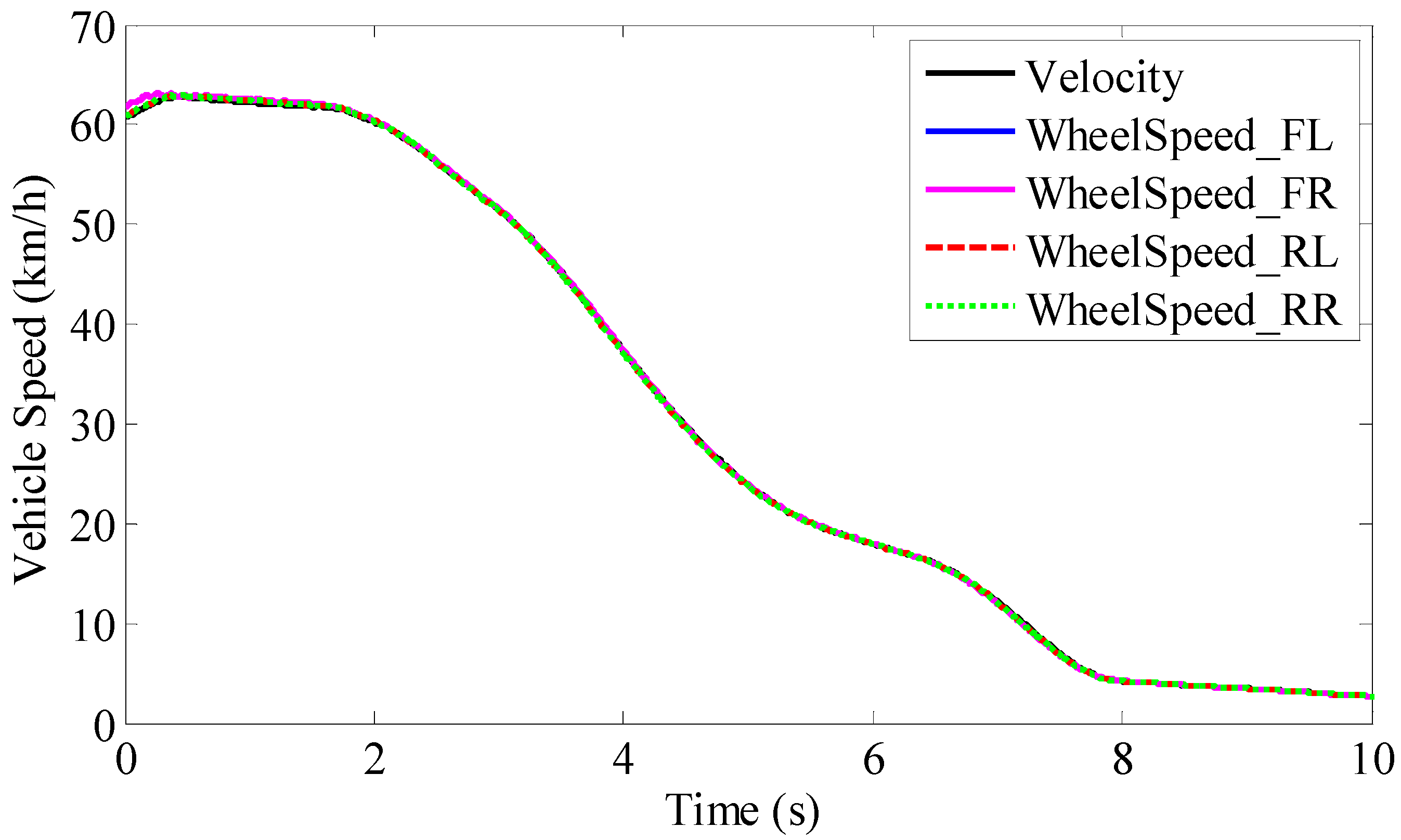
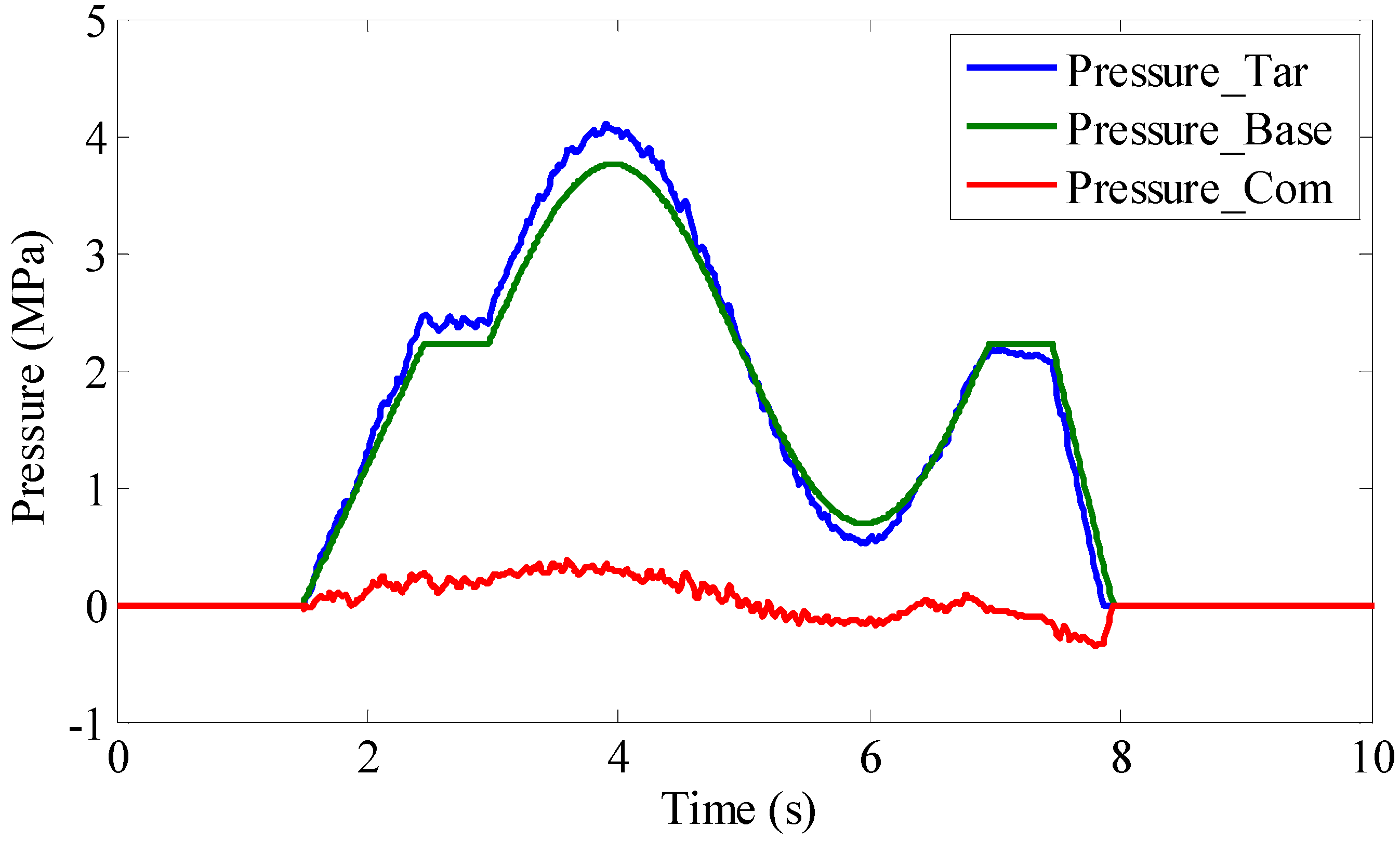
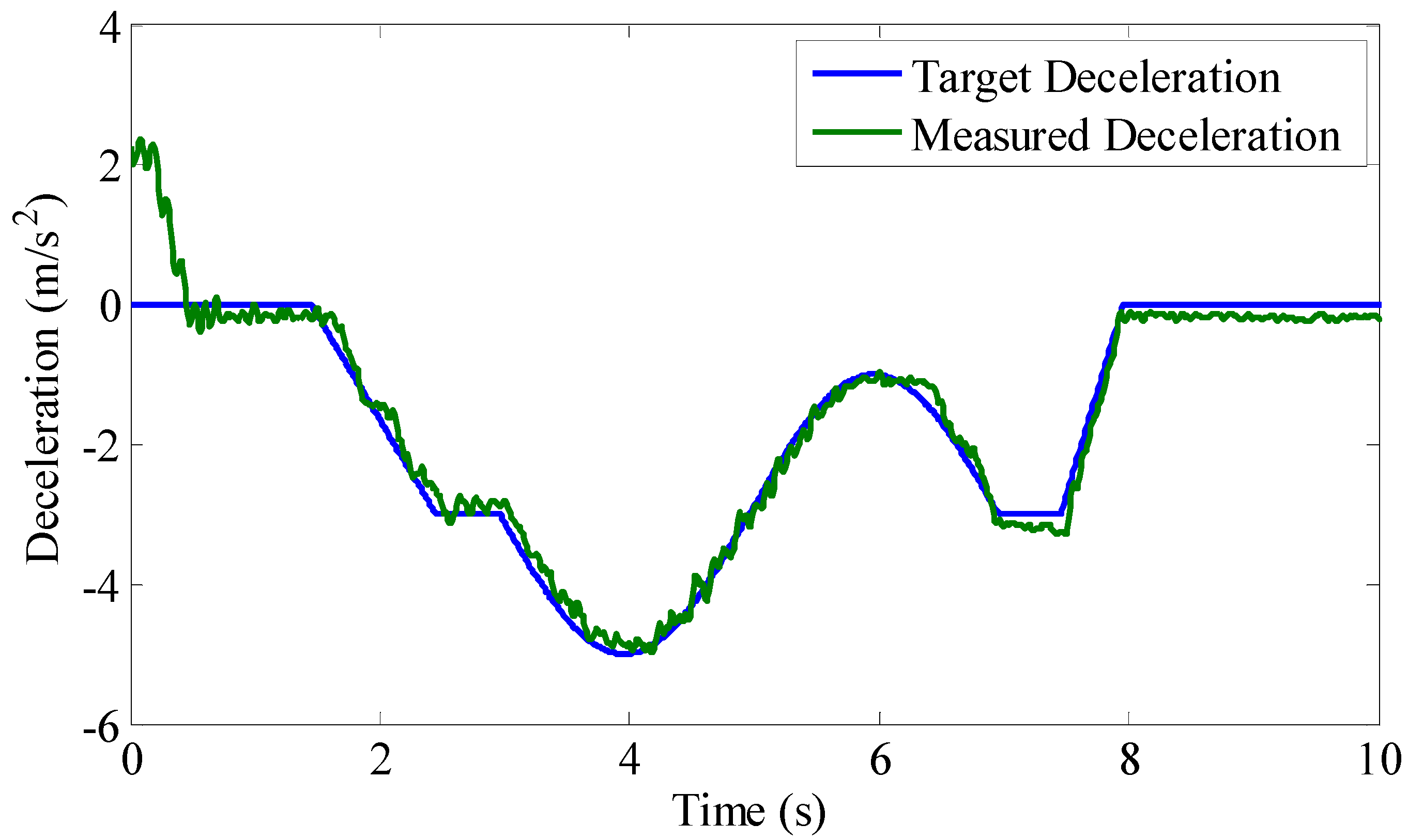
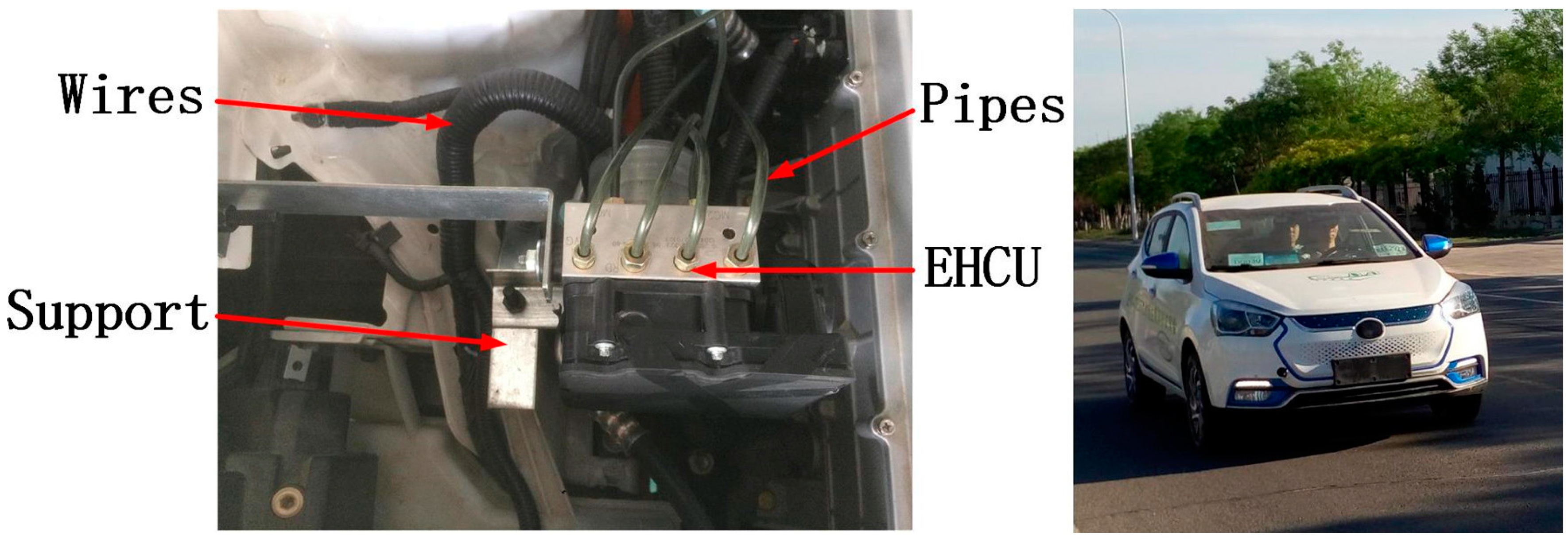
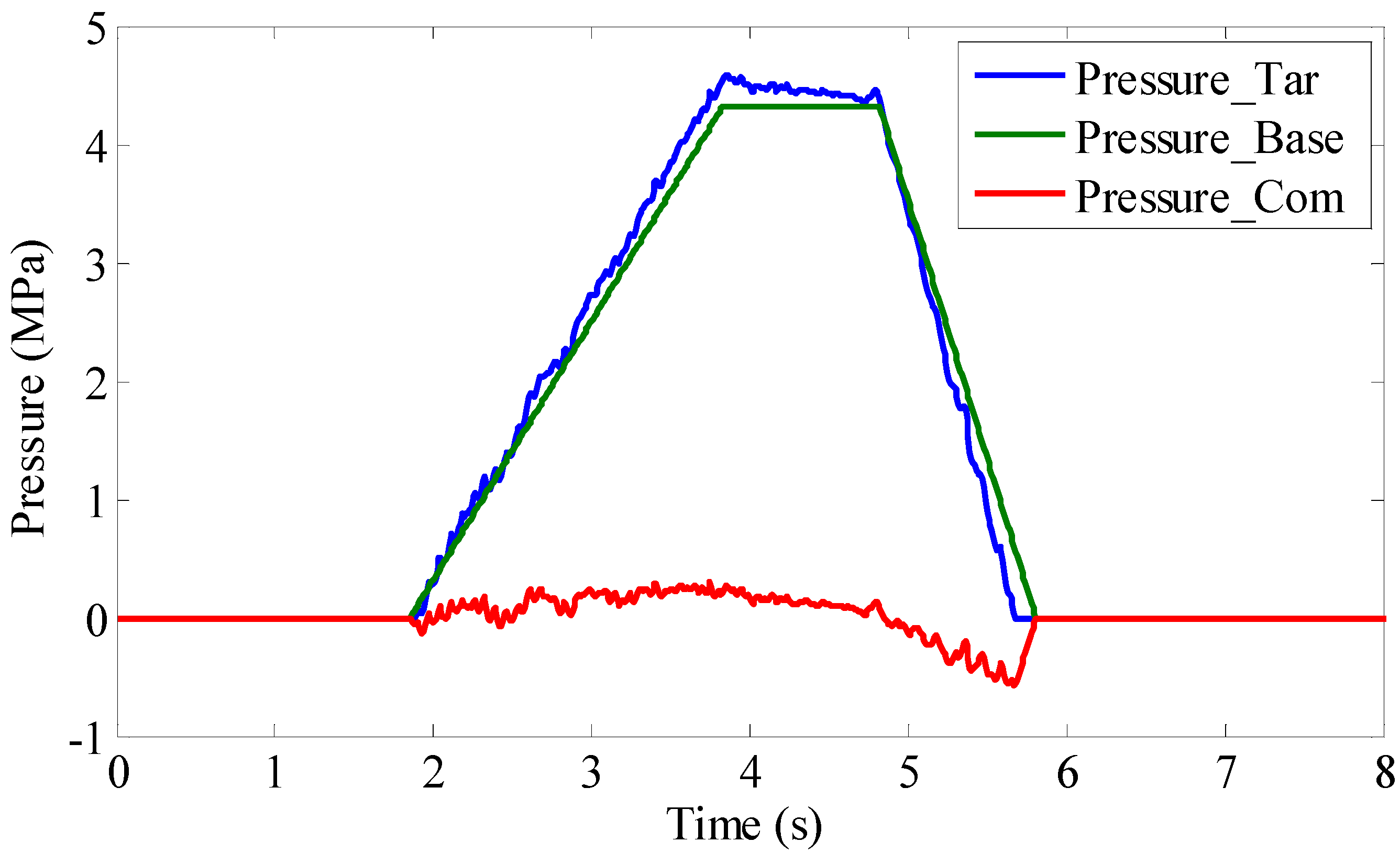
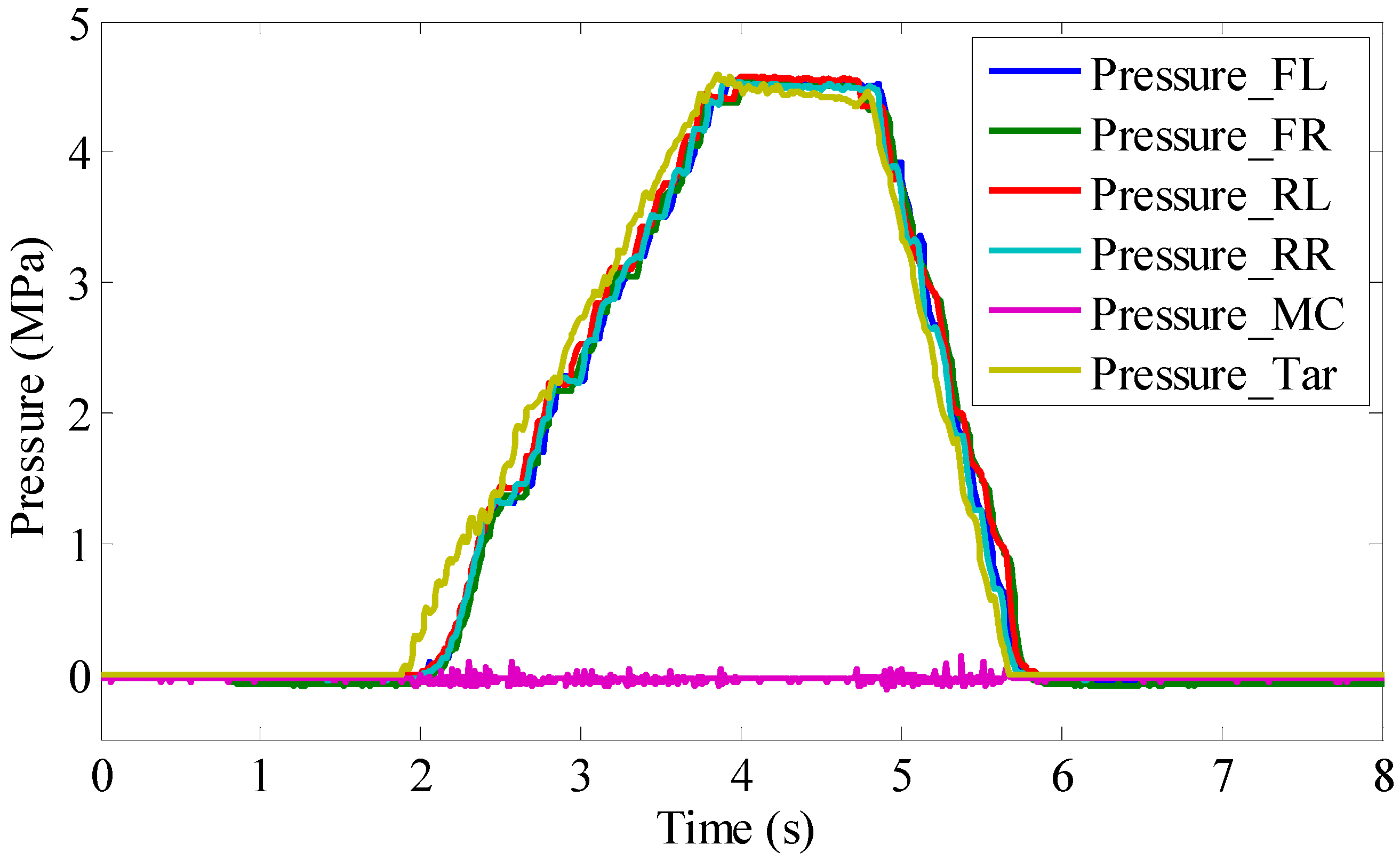
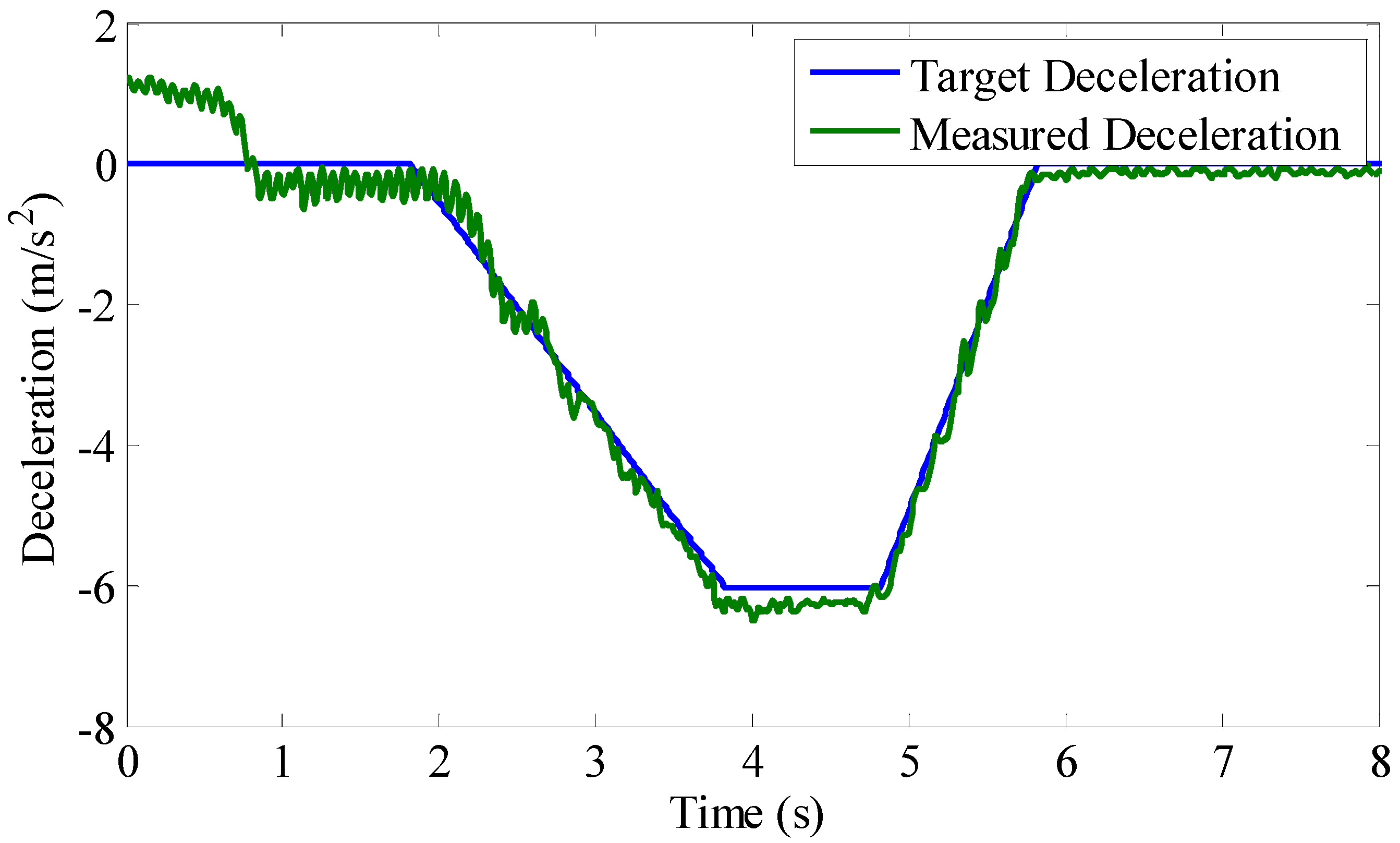
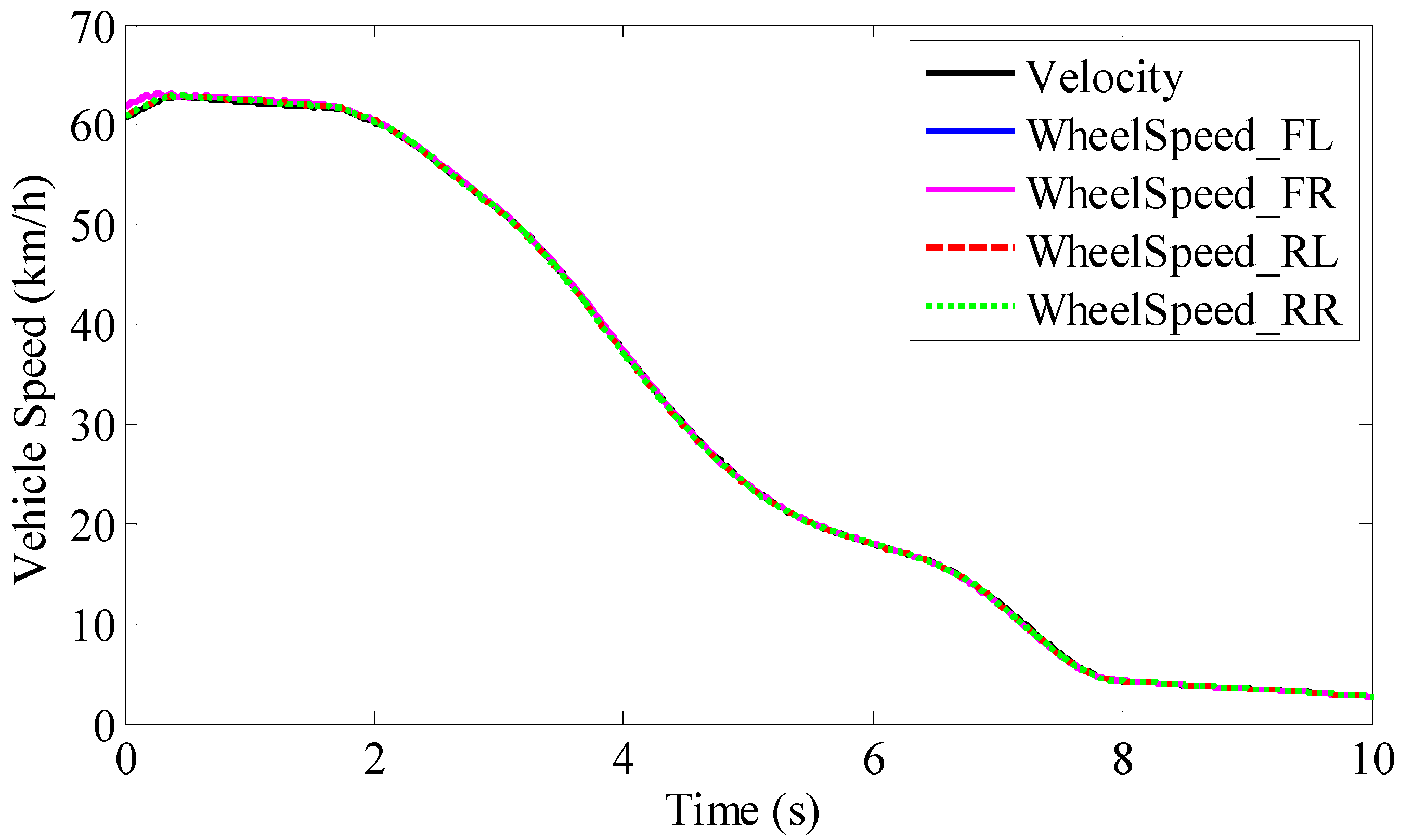
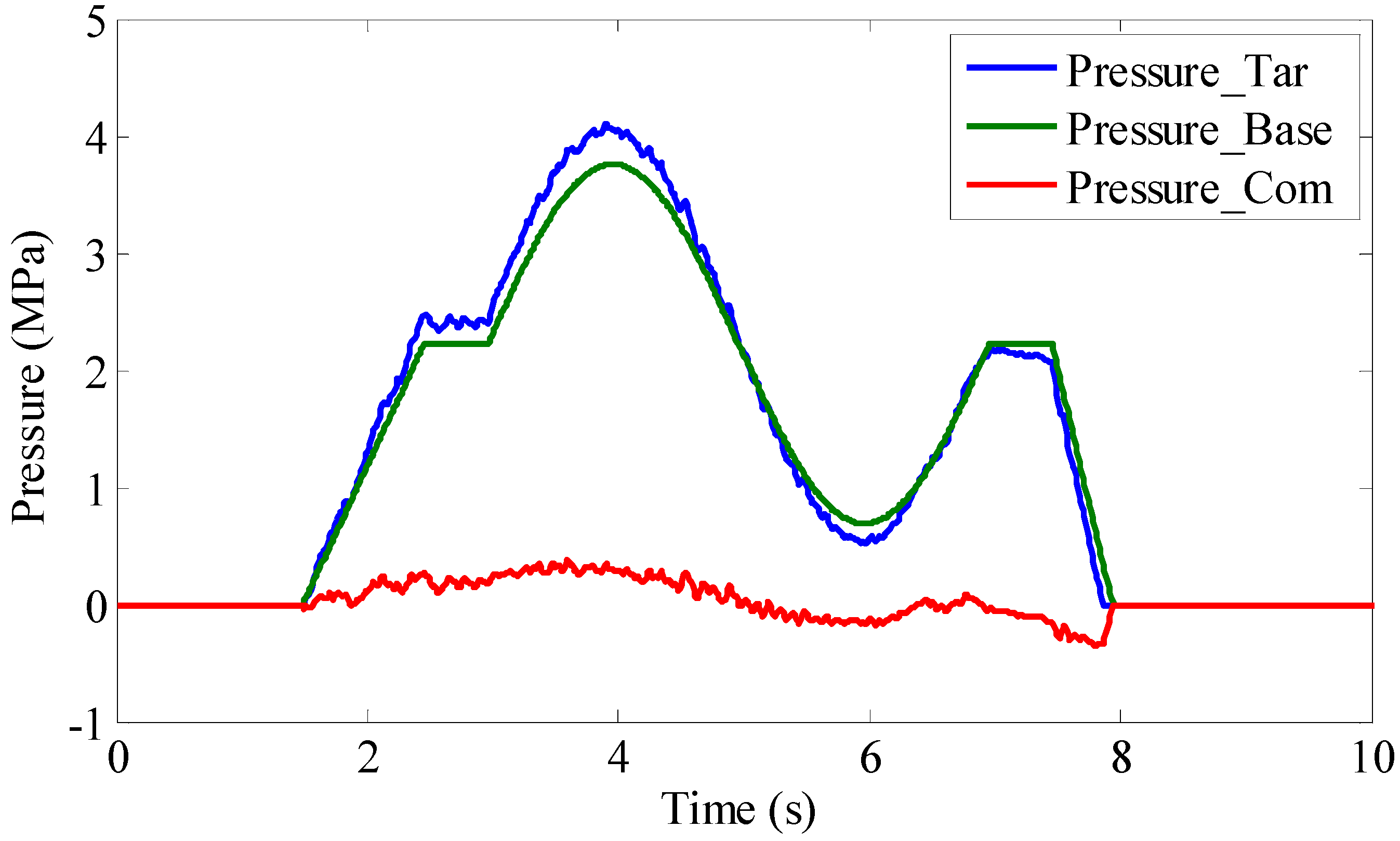
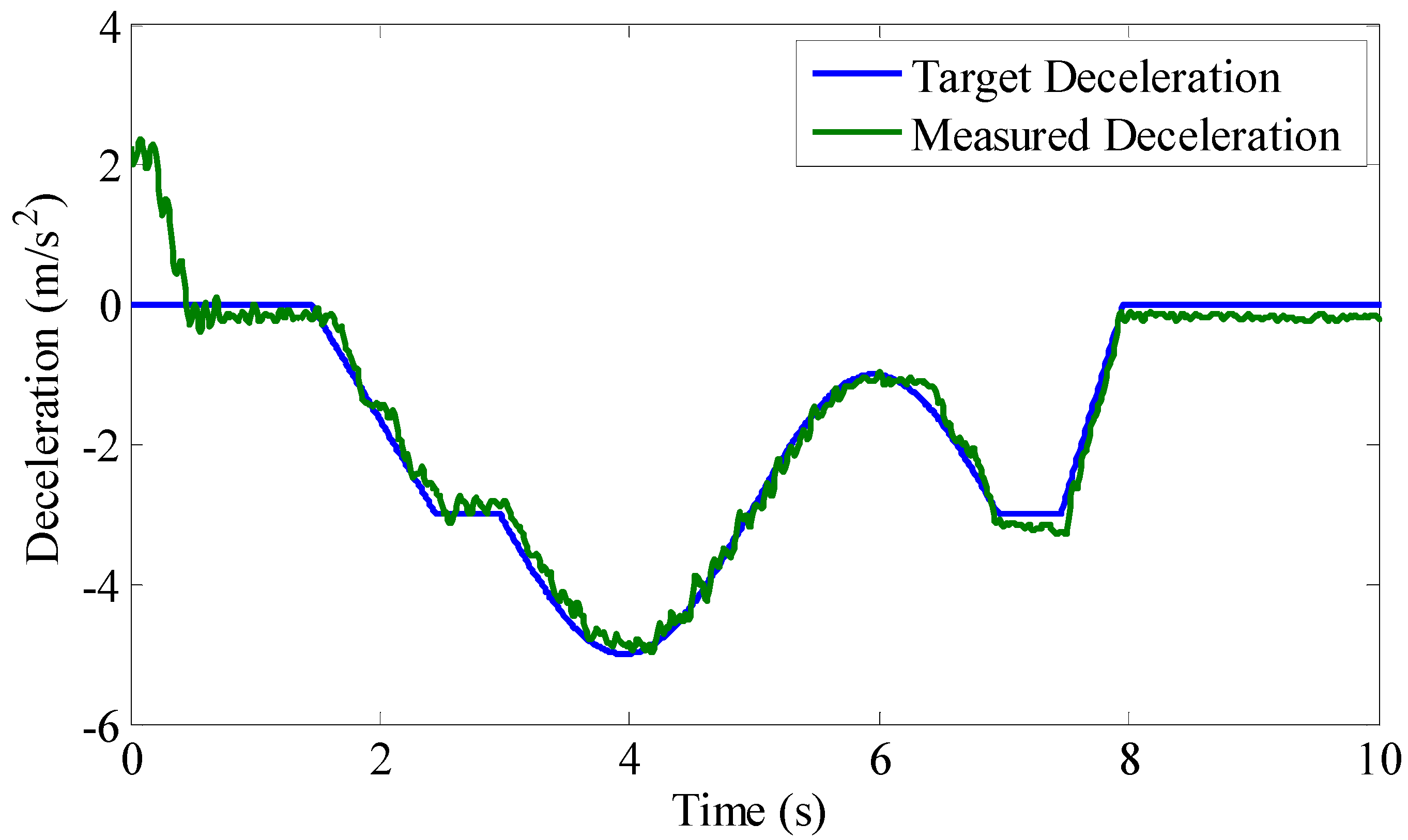
4. Results and Analysis of Vehicle Experiments
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- McGehee, D.V.; Brewer, M.; Schwarz, C.; Smith, B.W. Review of Automated Vehicle Technology: Policy and Implementation Implications; Iowa Department of Transportation: Ames, IA, USA, 2016.
- Buechel, M.; Frtunikj, J.; Becker, K.; Sommer, S.; Buckl, C.; Armbruster, M.; Marek, A.; Zirkler, A.; Klein, C.; Knoll, A. An automated electric vehicle prototype showing new trends in automotive architectures. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Las Palmas, Spain, 15–18 September 2015; pp. 1274–1279. [Google Scholar]
- Li, L.; Lu, Y.; Wang, R.; Chen, J. A Three-Dimensional Dynamics Control Framework of Vehicle Lateral Stability and Rollover Prevention via Active Braking With MPC. IEEE Trans. Ind. Electron. 2017, 64, 3389–3401. [Google Scholar] [CrossRef]
- Tchamna, R.; Youn, E.; Youn, I. Combined control effects of brake and active suspension control on the global safety of a full-car nonlinear model. Veh. Syst. Dyn. 2014, 52, 69–91. [Google Scholar] [CrossRef]
- Chen, J.; Song, J.; Li, L.; Ran, X.; Jia, G.; Wu, K. A novel pre-control method of vehicle dynamics stability based on critical stable velocity during transient steering maneuvering. Chin. J. Mech. Eng. 2016, 29, 475–485. [Google Scholar] [CrossRef]
- Li, B.; Rakheja, S. Jackknifing Prevention of Tractor-Semitrailer Combination Using Active Braking Control; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2015.
- Wu, J.; Cheng, S.; Liu, B.; Liu, C. A Human-Machine-Cooperative-Driving Controller Based on AFS and DYC for Vehicle Dynamic Stability. Energies 2017, 10, 1737. [Google Scholar] [CrossRef]
- Bengler, K.; Dietmayer, K.; Farber, B.; Maurer, M.; Stiller, C.; Winner, H. Three decades of driver assistance systems: Review and future perspectives. IEEE Intell. Transp. Syst. Mag. 2014, 6, 6–22. [Google Scholar] [CrossRef]
- McCall, J.C.; Trivedi, M.M. Video-based lane estimation and tracking for driver assistance: Survey, system, and evaluation. IEEE Trans. Intell. Transp. Syst. 2006, 7, 20–37. [Google Scholar] [CrossRef]
- Vahidi, A.; Eskandarian, A. Research advances in intelligent collision avoidance and adaptive cruise control. IEEE Trans. Intell. Transp. Syst. 2003, 4, 143–153. [Google Scholar] [CrossRef]
- Coelingh, E.; Eidehall, A.; Bengtsson, M. Collision warning with full auto brake and pedestrian detection-a practical example of automatic emergency braking. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010. [Google Scholar]
- Pan, N.; Yu, L.; Wang, Z.; Ma, L.; Song, J.; Zhang, Y.; Wei, W. Design, Modeling and Simulation of a New Compact Electro-Hydraulic Brake System; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2014.
- Lv, C.; Zhang, J.; Li, Y.; Sun, D.; Yuan, Y. Hardware-in-the-loop simulation of pressure-difference-limiting modulation of the hydraulic brake for regenerative braking control of electric vehicles. Proc. Inst. Mech. Eng. Part D 2014, 228, 649–662. [Google Scholar] [CrossRef]
- Axin, M.; Eriksson, B.; Krus, P. Flow versus pressure control of pumps in mobile hydraulic systems. Proc. Inst. Mech. Eng. Part I 2014, 228, 245–256. [Google Scholar] [CrossRef]
- Chen, J.; Song, J.; Li, L.; Jia, G.; Ran, X.; Yang, C. UKF-based adaptive variable structure observer for vehicle sideslip with dynamic correction. IET Control Theory Appl. 2016, 10, 1641–1652. [Google Scholar] [CrossRef]
- Jiang, G.; Miao, X.; Wang, Y.; Chen, J.; Li, D.; Liu, L.; Muhammad, F. Real-time estimation of the pressure in the wheel cylinder with a hydraulic control unit in the vehicle braking control system based on the extended Kalman filter. Proc. Inst. Mech. Eng. Part D 2017, 231, 1340–1352. [Google Scholar] [CrossRef]
- Yao, J.; Zhang, Y.; Wang, J. Research on algorithm of braking pressure estimating for anti-lock braking system of motorcycle. In Proceedings of the 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; pp. 586–591. [Google Scholar]
- Wu, D.; Ding, H.; Guo, K.; Wang, Z. Experimental Research on the Pressure Following Control of Electro-Hydraulic Braking System; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2014.
- Lv, C.; Wang, H.; Cao, D. High-Precision Hydraulic Pressure Control Based on Linear Pressure-Drop Modulation in Valve Critical Equilibrium State. IEEE Trans. Ind. Electron. 2017, 64, 7984–7993. [Google Scholar] [CrossRef]
- Wang, J.; Jiu, J.; Nogi, M.; Sugahara, T.; Nagao, S.; Koga, H.; He, P.; Suganuma, K. A highly sensitive and flexible pressure sensor with electrodes and elastomeric interlayer containing silver nanowires. Nanoscale 2015, 7, 2926–2932. [Google Scholar] [CrossRef] [PubMed]
- Kumar, A.; Yadav, S.; Agarwal, R. Design and development of a pressure transducer for high hydrostatic pressure measurements up to 200 MPa. J. Inst. Eng. 2017, 98, 413–420. [Google Scholar] [CrossRef]
- Zhao, X.; Li, L.; Song, J.; Li, C.; Gao, X. Linear control of switching valve in vehicle hydraulic control unit based on sensorless solenoid position estimation. IEEE Trans. Ind. Electron. 2016, 63, 4073–4085. [Google Scholar] [CrossRef]
- Li, L.; Jia, G.; Chen, J.; Zhu, H.; Cao, D.; Song, J. A novel vehicle dynamics stability control algorithm based on the hierarchical strategy with constrain of nonlinear tyre forces. Veh. Syst. Dyn. 2015, 53, 1093–1116. [Google Scholar] [CrossRef]
- Di Cairano, S.; Tseng, H.E.; Bernardini, D.; Bemporad, A. Vehicle yaw stability control by coordinated active front steering and differential braking in the tire sideslip angles domain. IEEE Trans. Control Syst. Technol. 2013, 21, 1236–1248. [Google Scholar] [CrossRef]
- Yu, L.; Ma, L.; Song, J.; Liu, X. Magnetorheological and Wedge Mechanism-Based Brake-by-Wire System with Self-Energizing and Self-Powered Capability by Brake Energy Harvesting. IEEE/ASME Trans. Mechatron. 2016, 21, 2568–2580. [Google Scholar] [CrossRef]
- He, X.; Yang, K.; Ji, X.; Liu, Y.; Deng, W. Research on Vehicle Stability Control Strategy Based on Integrated-Electro-Hydraulic Brake System; SAE Technical Paper 2017-01-1565; SAE International: Warrendale, PA, USA, 2017.
- Li, L.; Li, X.; Wang, X.; Liu, Y.; Song, J.; Ran, X. Transient switching control strategy from regenerative braking to anti-lock braking with a semi-brake-by-wire system. Veh. Syst. Dyn. 2016, 54, 231–257. [Google Scholar] [CrossRef]
- Ahn, J.K.; Jung, K.H.; Kim, D.H.; Jin, H.B.; Kim, H.S.; Hwang, S.H. Analysis of a regenerative braking system for hybrid electric vehicles using an electro-mechanical brake. Int. J. Automot. Technol. 2009, 10, 229–234. [Google Scholar] [CrossRef]
- Nam, K.; Fujimoto, H.; Hori, Y. Lateral stability control of in-wheel-motor-driven electric vehicles based on sideslip angle estimation using lateral tire force sensors. IEEE Trans. Veh. Technol. 2012, 61, 1972–1985. [Google Scholar]
- Kaiser, M. Electronic Control Unit (ECU). Gasoline Engine Management; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2015; pp. 254–259. [Google Scholar]
- Merritt, H.E. Hydraulic Control Systems; John Wiley & Sons: Hoboken, NJ, USA, 1967. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Duty | Increment Rate of Pump | Decrement Rate of Valve |
|---|---|---|
| 0% | 0 Mpa/s | −0.2 Mpa/s |
| 25% | 5.24 Mpa/s | −13.61 Mpa/s |
| 50% | 10.36 Mpa/s | 34.36 Mpa/s |
| 75% | 13.67 Mpa/s | −52.18 Mpa/s |
| 100% | 15.18 Mpa/s | −82.52 Mpa/s |
| Parameters | Values |
|---|---|
| Vehicle mass (m) | 1689 kg |
| Wheel base (T) | 2490 mm |
| Transmission ratio () | 1.0 |
| The final ratio () | 7.2 |
| Radius of wheels (r) | 307 mm |
| Coefficient of brake torque to pressure of front wheels (Kf) | 286 Nm/Mpa |
| Coefficient of brake torque to pressure of rear wheels (Kr) | 135 Nm/Mpa |
| State | RMSD | NRMSD |
|---|---|---|
| Deceleration | 0.226 m/s2 | 3.65% |
| Pressure | 0.245 Mpa | 5.33% |
| State | RMSD | NRMSD |
|---|---|---|
| Deceleration | 0.181 m/s2 | 3.63% |
| Pressure | 0.197 Mpa | 4.69% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nie, Y.; Liu, Y.; Cheng, S.; Mei, M.; Xiao, L. Unified Brake Service by a Hierarchical Controller for Active Deceleration Control in an Electric and Automated Vehicle. Energies 2017, 10, 2052. https://doi.org/10.3390/en10122052
Nie Y, Liu Y, Cheng S, Mei M, Xiao L. Unified Brake Service by a Hierarchical Controller for Active Deceleration Control in an Electric and Automated Vehicle. Energies. 2017; 10(12):2052. https://doi.org/10.3390/en10122052
Chicago/Turabian StyleNie, Yuliang, Yahui Liu, Shuo Cheng, Mingming Mei, and Lingyun Xiao. 2017. "Unified Brake Service by a Hierarchical Controller for Active Deceleration Control in an Electric and Automated Vehicle" Energies 10, no. 12: 2052. https://doi.org/10.3390/en10122052
APA StyleNie, Y., Liu, Y., Cheng, S., Mei, M., & Xiao, L. (2017). Unified Brake Service by a Hierarchical Controller for Active Deceleration Control in an Electric and Automated Vehicle. Energies, 10(12), 2052. https://doi.org/10.3390/en10122052