1. Introduction
With the acceleration of industrial modernization, the smoke and dust emitted by factories and the exhaust gas from gasoline combustion are mixed with atmospheric particles to form haze. As a kind of disastrous weather, haze is increasingly common in our daily life. As particles in the atmosphere, haze absorbs and scatters light, which blurs the background of the image captured by the imaging sensor device, significantly reduces the visibility of the scene, and masks the details of image. Image dehazing is of great significance for computer vision tasks [
1]. Before images taken on foggy days are input into computer vision algorithms frame (such as object detection [
2,
3,
4,
5], scene recognition [
6], etc.), it is necessary to preprocess the images to improve the effectiveness of subsequent models. Many practical applications, such as video surveillance, automatic driving, and outdoor vision systems, all need the help of image dehazing technology to improve system effects.
Image dehazing technology [
7] can be divided into single-image dehazing and multi-image dehazing. The multi-image dehazing [
8] requires numerous additional information inputs. In addition, the scene geometry model used for multi-image dehazing needs large images of the same scene under different weather conditions or different polarization states to be compared and analyzed. This kind of information input limits the application of this method in real life scenes. Therefore, researchers pay more attention to single-image dehazing methods. Single-image dehazing falls into three categories: enhancement-based methods, physical model-based methods, and learning-based methods. Image enhancement aims to emphasize and enhance some feature attributes of foggy images. Tan [
9] divides the image into several small blocks, and maximizes the contrast of each small block to remove fog. Bekaert et al. (2012) [
10] and Ancuti (2013) [
11] introduced fusion-based methods, which fused results, such as white balance, contrast enhancement, etc. Choi et al. (2015) [
12] proposed a non-reference perceptual fog density prediction model and enhanced images based on this model. Although image enhancement methods can improve the contrast of foggy images, there is still a lack of physical explanation for the results of dehazing technology.
The physical model approach is mainly based on the atmospheric scattering model [
13], which interprets foggy images as a combination of fog-free images and atmospheric lighting. Estimating transmission maps and atmospheric light maps are the two main tasks of physical model-based approaches. For the transmission map, many researchers have proposed their own solutions: dark channel prior estimation [
14,
15], color attenuation prior estimation [
16,
17], fog line prior method [
18], etc. The learning-based method [
19,
20,
21] is that researchers adjust parameters of neural network through training data to obtain the corresponding dehazing model. Many researchers also combine physical models and learning-based methods to accomplish this task. Zhu et al. [
22] reformulated the atmospheric scattering model into a generative adversarial network, where the network model learns atmospheric light and transmittance from the data, and reworked the model to improve the interpretability of the GAN. Huang et al. utilized the haze feature sequence obtained by self-encoding network to calculate the scene transmittance, finally substituted it into atmospheric scattering model to restore the dehazed image. However, deep learning methods require high-quality training data. In addition, some training methods are expensive, requiring the consumption of processors and GPUs.
Almost all of dehazing strategies mentioned above are aimed at daytime. Generally, the sun is the main light source for daytime images, and the overall atmospheric light basically remains constant. Affected by artificial light, such as street lights and car lights, the atmospheric light value at night is not uniform. Therefore, the daytime dehazing algorithms are not necessarily applicable for nighttime images. Furthermore, extensive previous experiments have demonstrated that some well-behaved image dehazing frameworks under daytime conditions cannot be directly applied to nighttime tasks.
According to the analysis of scene conditions, nighttime images have the following characteristics: (1) it is difficult to determine the illumination intensity and range of artificial light sources. If there are many artificial light sources in the image, the pixel values of weaker light sources will also be affected by the strong light sources. Depending on the position of the imaging device, reflected light from objects in the captured image is attenuated differently. (2) In contrast to sunlight, the light emitted by artificial light sources is colored. The color description of an object in the nighttime image is the superposition of the color of itself and the color of the artificial light source.
In view of the above-mentioned characteristics of atmospheric light in foggy scenes at night, some researchers take advantage of illumination compensation and color correction to modify spatially varying illumination. Zhang et al. [
23] used the enhanced light intensity to balance illumination and corrected the color of incident light to estimate accurate ambient light; Pei et al. [
24] improved the dark channel prior to better adapt to nighttime dehazing tasks. In order to enhance the effect, they used color shift and local contrast correction. Though this method produces results with lower contrast and lower brightness overall; Li et al. [
25] proposed a relatively smooth constrained layering algorithm to remove the glow effect; based on the Retinex theory [
26], Yu et al. [
27] estimated the ambient illumination by channel differential guided filtering method, and they used the dark channel prior and the bright channel combination to evaluate the dehazing transmission map; paying attention to preserving the details of the fine structure area, Yang et al. [
28] decomposed the image into luminous image and non-luminous night image. They calculated the value of the atmospheric light and dark channels of each pixel in the non-luminous night image based on the superpixel method. Then, the transmission map is decomposed from fog-free image through the weighted guided image filter. All the above methods have achieved good results. However, past methods basically have some defects, such as color distortion, serious loss of texture details, and insufficient effect. Therefore, the task of dehazing nighttime images requires model reconstruction. Based on He’s dark channel theory dehazing algorithm (DCP) [
14], this paper proposes an improved nighttime dehazing algorithm for the influence matrix of artificial light sources. According to the light intensity of light source points, we filter the light source through the photometric map and obtain the corresponding light source influence matrix. The transmittance near the light source can be adaptively adjusted to reduce the glow effect near the light source by the light intensity matrix. The experimental results demonstrate that the method has great dehazing effect and detail retention at night, and the color cast problem of the restored image is also improved. Our main contributions are as follows:
The light source influence matrix is proposed to adaptively modify the transmittance near the artificial light source, so as to improve the dehazing task.
To enhance the detail of image, we used an edge filter to fuse the transmittance of the near and far light source areas. Furthermore, we used MRP to make the image more colorful.
For different fog concentration scenes, a bias coefficient is introduced to make the defogging algorithm suitable for dense fog scenes.
The paper is organized as follows:
Section 2 reviews the related work. The detailed model and the proposed framework are presented in
Section 3. The experiment results and the corresponding analyses are demonstrated in
Section 4. Finally, we conclude in
Section 5.
2. Related Work
The light will come into contact with suspended particles in the atmosphere during its propagation process, and some of the light will be scattered by the particles, so the light received by the imaging device will be weaker [
29]. In 1976, John Wiley et al. [
13] proposed that transmission light of the target would be attenuated by scattering, and the transmission device will receive not only the reflected light from the target but also a layer of atmospheric scattered light. Srinivasa G. Narasimhan et al. [
30] constructed a method to recover scenes for foggy days with low visibility by visual performance under different weather conditions. McCartney [
13] developed an atmospheric scattering model based on the Mie scattering theory, and the expression of the pixel value received by the device is expressed by the following equation:
where
x represents the position of the pixel in the image,
represents the foggy image,
represents the fog-free image,
represents the transmission at the position of
x in the image, and
A represents the atmospheric light value of the image. This model divides the light received by the device into two parts. The first part represents the target reflected light, which means that the reflected light is directly transmitted to the device through the absorption and scattering of airborne particles, also known as the direct attenuation term of incident light; the other part is that the ambient light (mainly including direct sunlight, atmospheric diffuse light, and ground reflected light), which will also be attenuated by the action of the medium in the air.
Many daytime physical model dehazing methods and some nighttime dehazing methods have been designed based on this model. The most typical one is the dark channel dehazing algorithm (DCP), which takes into account the global uniformity of atmospheric light in the daytime environment and can recover satisfactory images of the scene. He et al. [
14] studied many fog-free images and found that at least one channel of the non-sky color block of the fog-free image contains very low-intensity pixels, and this color channel is called the dark channel. Ideally, the dark channel of a clear image is approximately zero and is mathematically represented as follows:
However, in foggy images, air light causes the intensity of the color block pixels in these dark channels to increase. Therefore, during the process of recovery, it is necessary to adjust the light transmittance and the atmospheric light value to make the image clear. The author in [
14] takes the average value of the first 0.1% pixels of illumination in the dark channel as the atmospheric light value, which is expressed by
. The transmittance is estimated from the atmospheric light value, which is mathematically expressed as:
Among them,
is the introduction parameter which represents the concentration of fog.
is the transmission at the position of
y in the image, where the position
y is a point belonging to the set of light sources
.
means atmospheric light values in the channel
c.
means pixel value at the position of
y in the channel
c. The image obtained in this way will have a block effect. To solve the above problem, He et al. [
14] proposed a soft-matting algorithm to correct the initial transmission map. Finally, the atmospheric light value and transmission map are brought into Equation (
1) to obtain the final restored image:
However, in night scenes, the atmospheric ambient light is susceptible to nighttime lighting [
31]. The local maximum intensity of each color channel in the image is mainly provided by artificial light source, so it is inaccurate to use global atmospheric light values to preserve the color characteristic of nighttime images. Therefore, we can reduce the attention on ambient light and directly estimate the ambient illumination and transmittance to recover foggy images. Most of the light radiated by point-like artificial sources varies smoothly in space, except for some sudden changes between bright and dark areas due to shading. In the estimation of ambient illumination, it is necessary to use light intensity normalization and maintain the color component of the artificial light source. Many researchers have analyzed the night scenes and reworked the atmospheric imaging model, as shown in the
Table 1. Zhang et al. [
32] splits the atmospheric light value
A in Equation (
1) into
, which is mathematically represented as:
where
represents the ambient illumination, and
represents the environmental color coefficient. Although the improved model is effective in the nighttime defogging task, it still can not remove the halo effect from the nighttime images.
For removing the above halo effect, Li et al. [
25] suggested adding a nighttime halo term to the original equation:
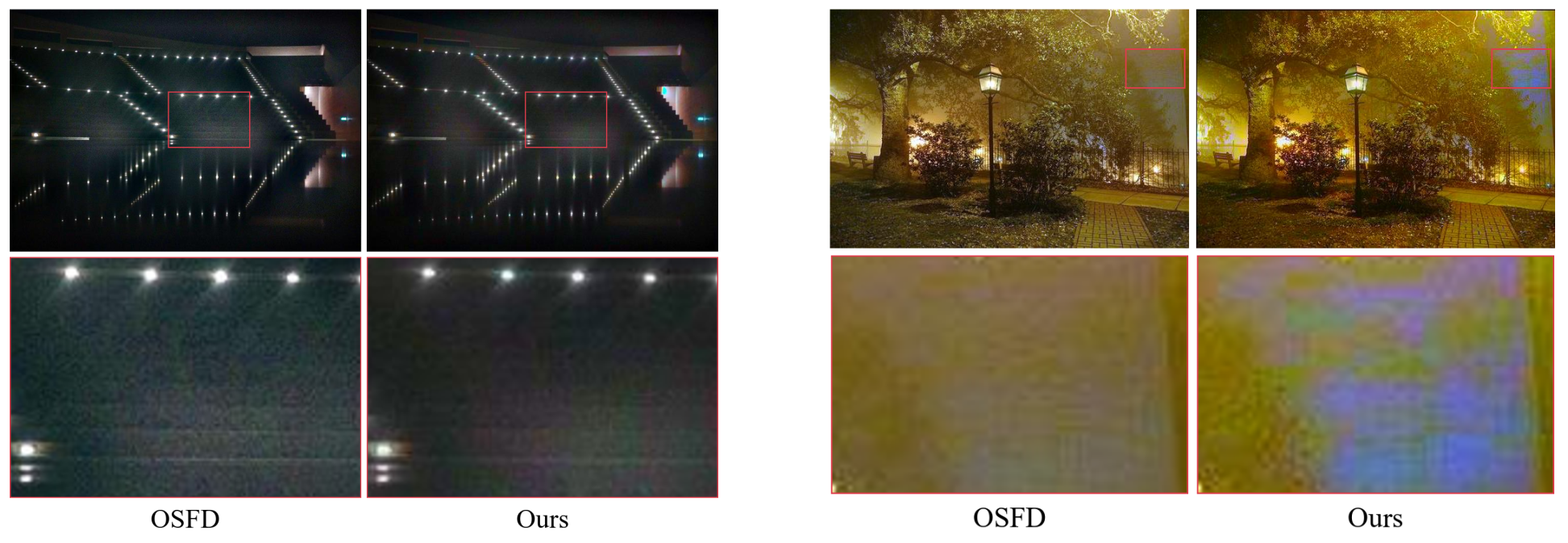
The atmospheric point spread function is expressed as a halo term in the proposed model, and it decays with increasing depth of field. The halo term can represent the halo characteristics of the image, and the new proposed model can estimate the atmospheric light pixel by pixel, so that the halo can be removed from the image more accurately. Nevertheless, it should be noted that some noise in the recovered image is amplified and some color artifacts are generated around the light source.
Zhang et al. [
32] observed that each color channel of fog-free images contains some high-intensity pixels. For nighttime images, the high-intensity pixels of their color channels are all contributed by artificial ambient lighting. Based on these observed phenomena, the authors put forward the maximum reflection prior (MRP) to estimate the atmospheric light map. Due to the influence of the color of the artificial light source, the maximum reflectance map of the nighttime image is mathematically expressed as:
Under the action of light, the maximum reflectance is approximated as 1:
In nighttime images, the color channel of the glow part of the light source has a high-intensity value, and MRP can be used to improve the halo around the light source to some extent. The prior models, however, are built based on clear daytime image characteristics, which in some cases are different from the nighttime image characteristics. The fog-free image output with MRP alone will be distorted.
On the basis of MRP, Zhang et al. [
35] proposed the Optimal Scale-Based Maximum Reflectance Prior algorithm (OSFD), which considers the maximum reflectance as the probability of a pixel block that completely reflects the incident light in all frequency ranges. Moreover, color correction and defogging are separated and solved sequentially. In addition, the extinction Laplace matrix in the MRP method is replaced by the maximum value of the light intensity in all channels as a way to facilitate the calculation of the light intensity normalization. To reduce the halo effect and retain details, Ancuti C et al. [
33] were inspired by the dark channel algorithm to assign higher weights to high-contrast image blocks, and finally used the Laplace pyramid decomposition of the input multi-scale image blocks and weight maps to estimate the atmospheric light terms of the image blocks. A new model for imaging nighttime fog images containing artificial light sources was developed by Yang et al. [
34] by deeply analyzing the imaging pattern of nighttime fog images. The ambient light is estimated using low-pass filtering, followed by the prediction of the night scene transmittance using ambient light, and, finally, the histogram matching method is used to color correct the result.
3. Proposed Method
3.1. Problem Analysis
Firstly, the illumination of the light source is uneven. In the nighttime environment, the illumination intensity of the artificial light source is much greater than that of the ambient light, resulting in excessive illumination in the area close to the light source and insufficient illumination in the area far away from the light source, which is why the illumination of the image we see is uneven. Accordingly, the non-constant atmospheric light value plays a significant role in nighttime image dehazing.
Secondly, the color shift of the light source. The intensity of artificial light sources is not like sunlight in the daytime. The color of the light source determines the naturalness of scene objects in the image, and the color of the light source will also affect the final dehazing effect.
Third, the details of the image after dehazing. Since the whole image is in a night scene, the lack of brightness will lead to high noise and serious loss of image details after dehazing. However, if the exposure of the entire image is simply increased, the glow portion will also increase.
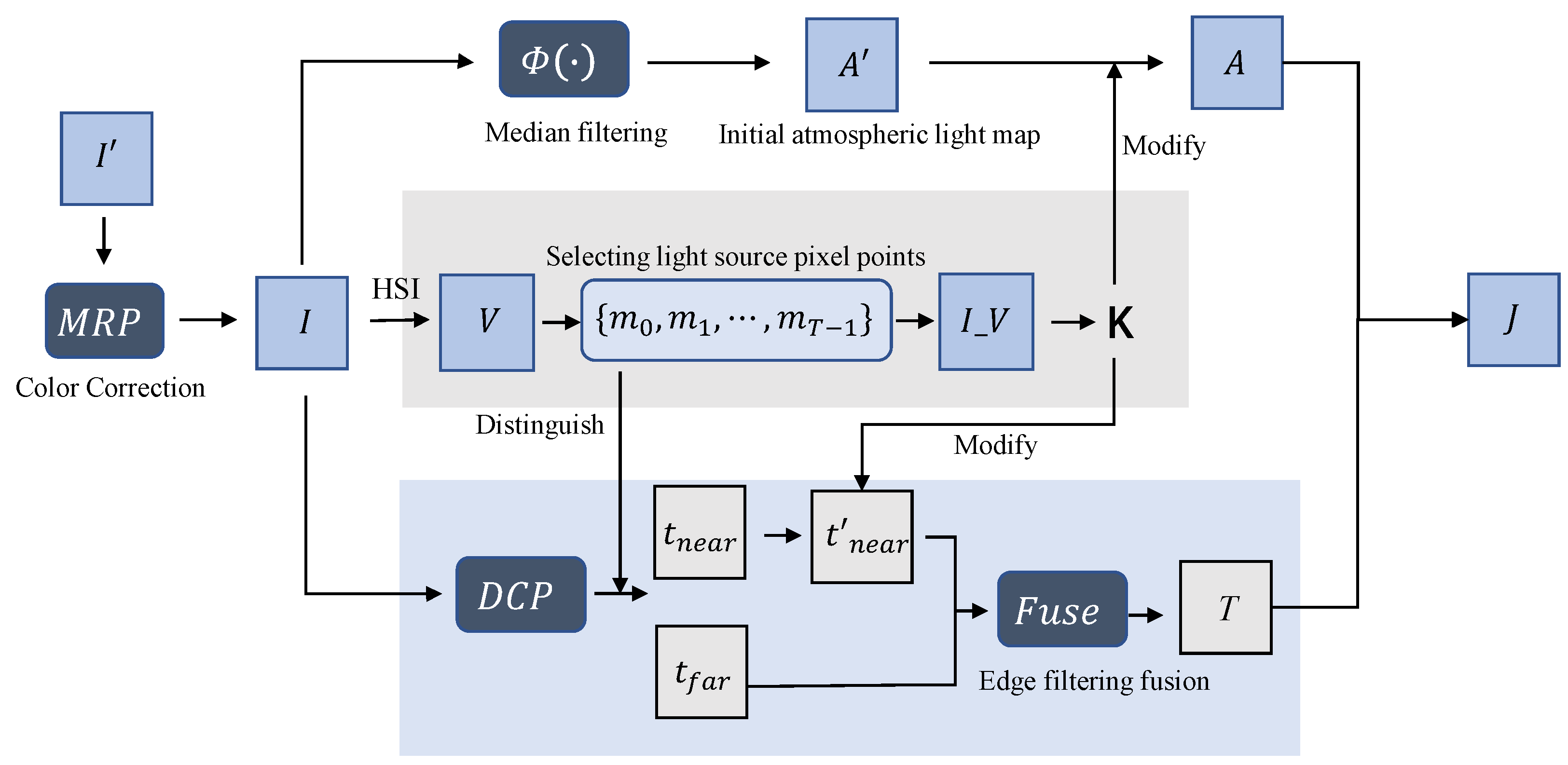
3.2. Overview of Algorithm
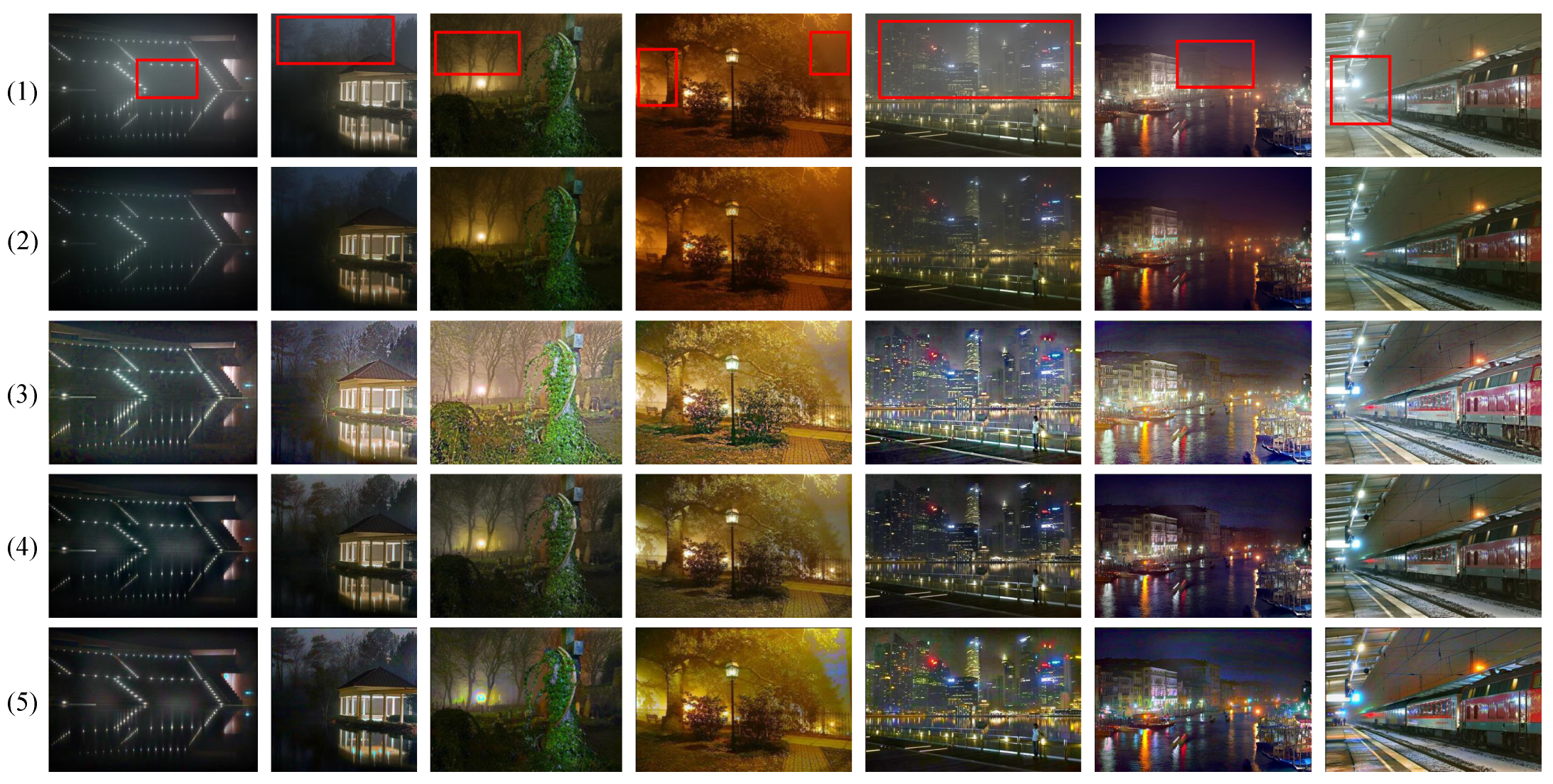
In order to solve the problems of serious texture loss and poor dehazing effect in the nighttime dehazing algorithm, this paper proposes a nighttime dehazing method based on the light source influence matrix. The algorithm flow is shown in Algorithm 1. As illustrated in
Figure 1, the whole algorithm consists of a pre-processing section (Color Correction), a section of calculating light source influence matrix, and a dehazing section.
Color Correction: The color of the artificial light source in the night scene has a certain influence on the reflected light of the object. It is necessary to perform color correction on the image at first to prevent color distortion of the image after dehazing. Therefore, the first step is to correct the color shift of the image through the maximum reflection prior algorithm, so as to maintain the color balance of the image and enhance the details of the image.
Light Source Influence Matrix: The low-frequency component is extracted from the image through a mid-pass filter, and the initial atmospheric light value is calculated with the low-frequency component. Then the image is transferred to the HSI space to extract the photometric map. According to the photometric map, the artificial light source pixels are filtered out and the corresponding influence matrix is calculated. After superposition, the final matrix is obtained.
Nighttime Dehaze: Using the light source influence matrix and introducing the adaptive atmospheric light deviation coefficient, the atmospheric light value near the light source area is corrected. The initial transmittance of the two regions is estimated separately from the dark channel method and then refined to fuse the boundary parts of the two regions. Among them, the transmittance of the near-source region is modified and adjusted using the edge-preserving filtering method. Finally, the dehazing image is obtained by optimizing the atmospheric light value, transmittance and the light source influence matrix.
| Algorithm 1: Nighttime dehazing algorithm |
| Data: |
|
Result: J |
| 1 Color Correction: |
| 2 |
| 3 Light Source Influence Matrix: |
| 4 calculate the matrix K according to Algorithm 2 |
| 5 Parameter Estimation: |
| 6 |
| 7 classify A according to Equation (15) |
| 8 calculate the initial transmittance map and according to Equation (16) |
| 9 |
| 10 Nighttime Dehaze: |
| 11 synthesize J according to Equation (21)
|
3.3. Light Source Influence Matrix
According to the MRP theory, the atmospheric light value is replaced by the illumination of artificial light source. As the distance increases, the attenuation of light decreases. The pixels near the light source are more affected by the light source, while the pixels far from the light source are less affected by the light source.
3.3.1. Judging the Near and Far Light Source Area
Convert the image to HSI space, and extract the photometric map of the image. Fully considering nighttime conditions, we default the brightness of artificial light sources to a great extent. The average value of the pixels in the top 0.5% of the photometric value is selected as the light source candidate threshold . In the photometric map, filter out the light source pixel points whose photometric values are greater than or equal to the threshold value. Keep the light source pixel points in the photometric map to obtain the light source map, and define the pixel blocks in the top 2% of the photometric value as the near light source region .
3.3.2. Create Light Influence Matrix
According to the
T light source pixel points in the light source map, number each light source pixel point in descending of the photometric value
, and calculate the influence matrix for each light source:
The normalized light source influence matrix is closer to 1 in the near light source area
; When the pixel is closer to the light source,
is higher; when the pixel is farther from the light source, influence value corresponding to the pixel is lower. For calculating the light source influence matrix, we summarize the algorithm flow in Algorithm 2.
| Algorithm 2: Light influence matrix |
 |
3.4. Night-Time Dehaze
3.4.1. Estimating Atmospheric Light
According to the Retinex theory, the modified
where
is a high-frequency component, the rest of items have the characteristics of smooth change, which belong to low-frequency components. When the pixel position i is far away from the light source, it is less affected by the artificial light source. After processing the image with a low-pass filter, the low-frequency components can be obtained to estimate the ambient light:
where
represents low pass filter,
represents low frequency components of the image. At the near light source, considering the large deviation of the atmospheric light from the near light source, the influence of the artificial light source far exceeds the surrounding environment.
Since the ambient light will be low after superimposing the influence value of the light source, which will affect the subsequent dehazing effect, the atmospheric light deviation coefficient
is introduced to modify the atmospheric light value
near the light source:
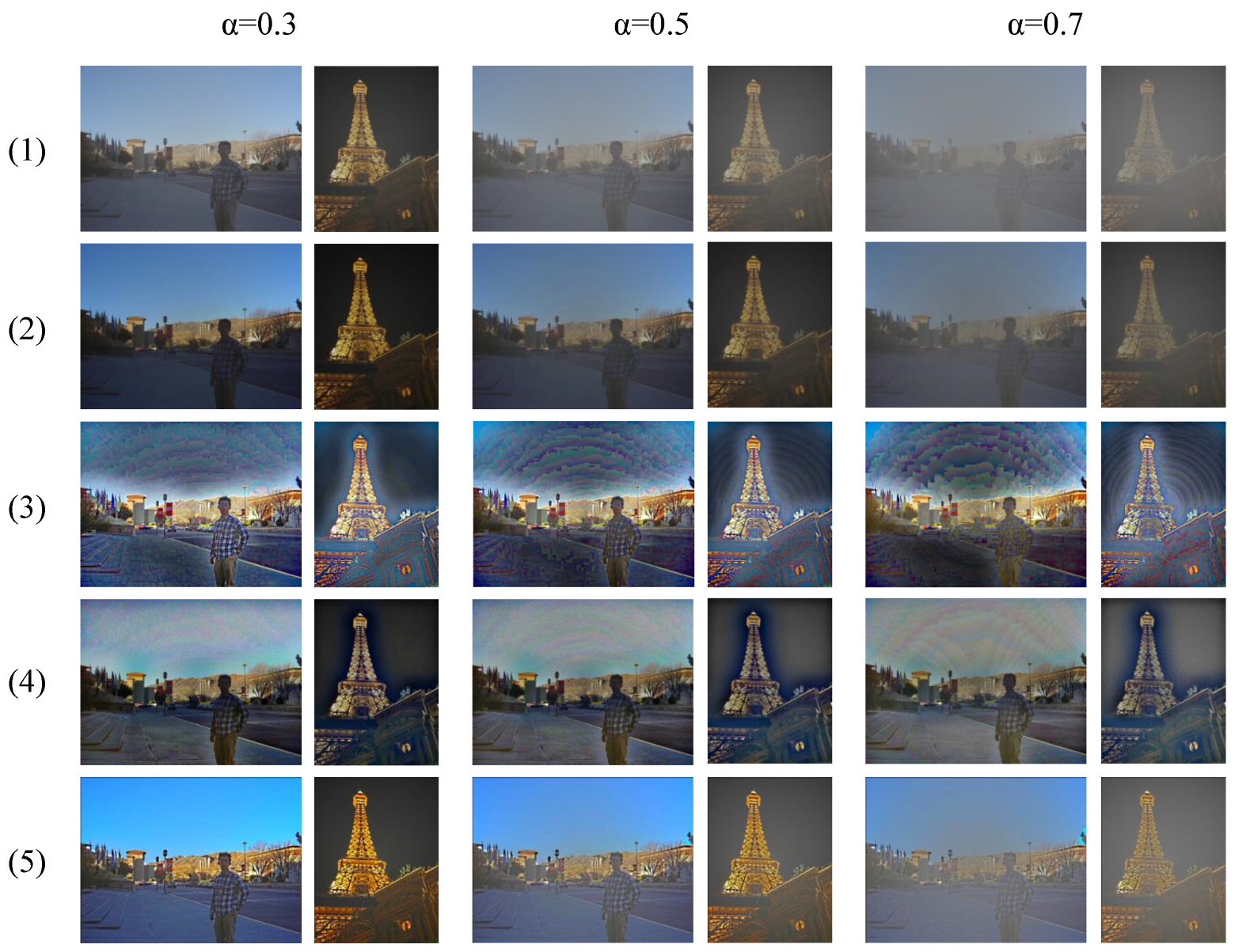
It has been verified by a large number of experiments that the dehazing effect of in the range of 0.1–0.16 is better.
3.4.2. Estimating Transmittance
We will use different transmittance estimation methods according to different regions, and obtain their respective transmittances in the near light source area and the non-near light source area. According to the two fusion and refinement, we can obtain the final transmittance.
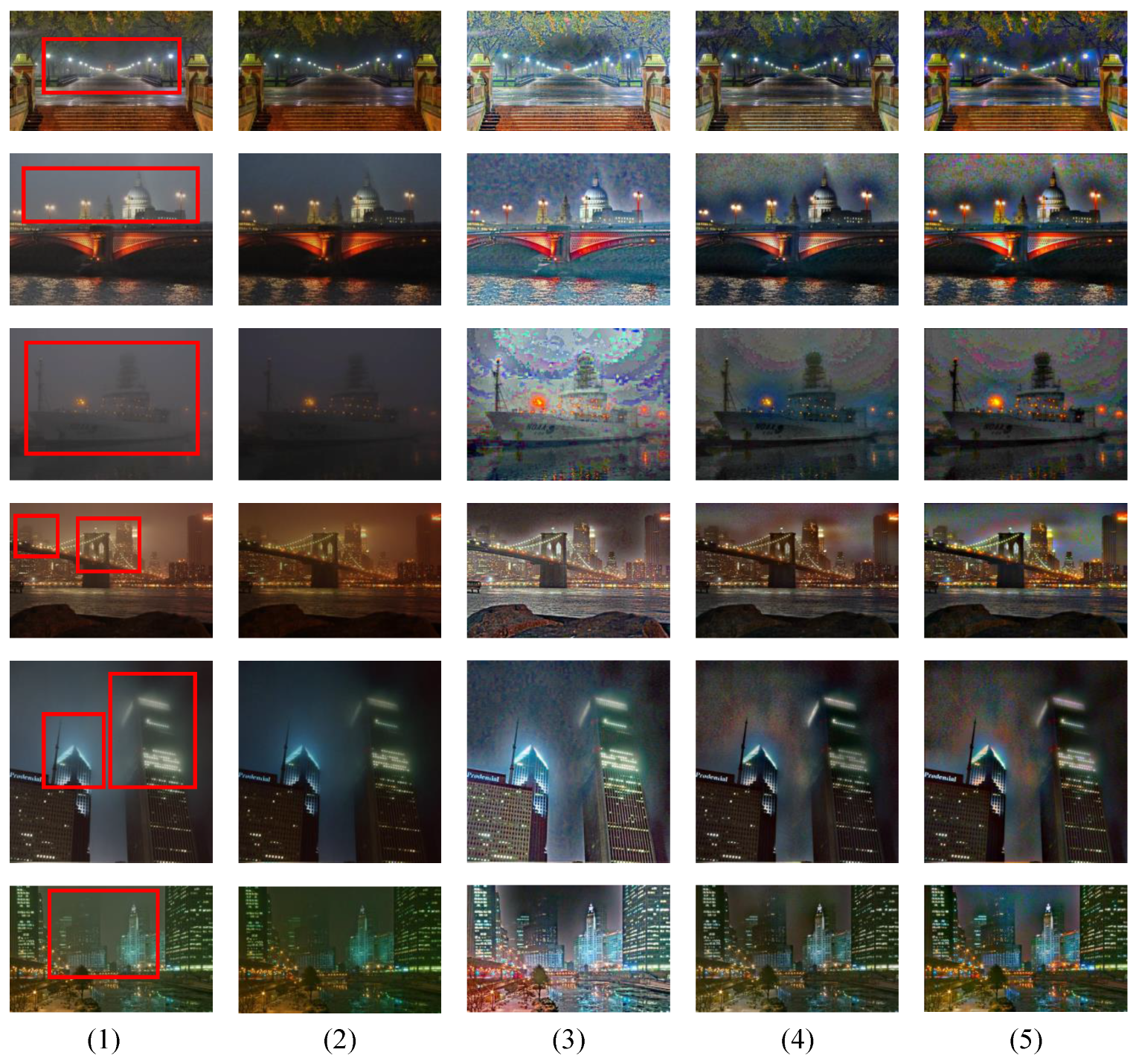
5. Conclusions
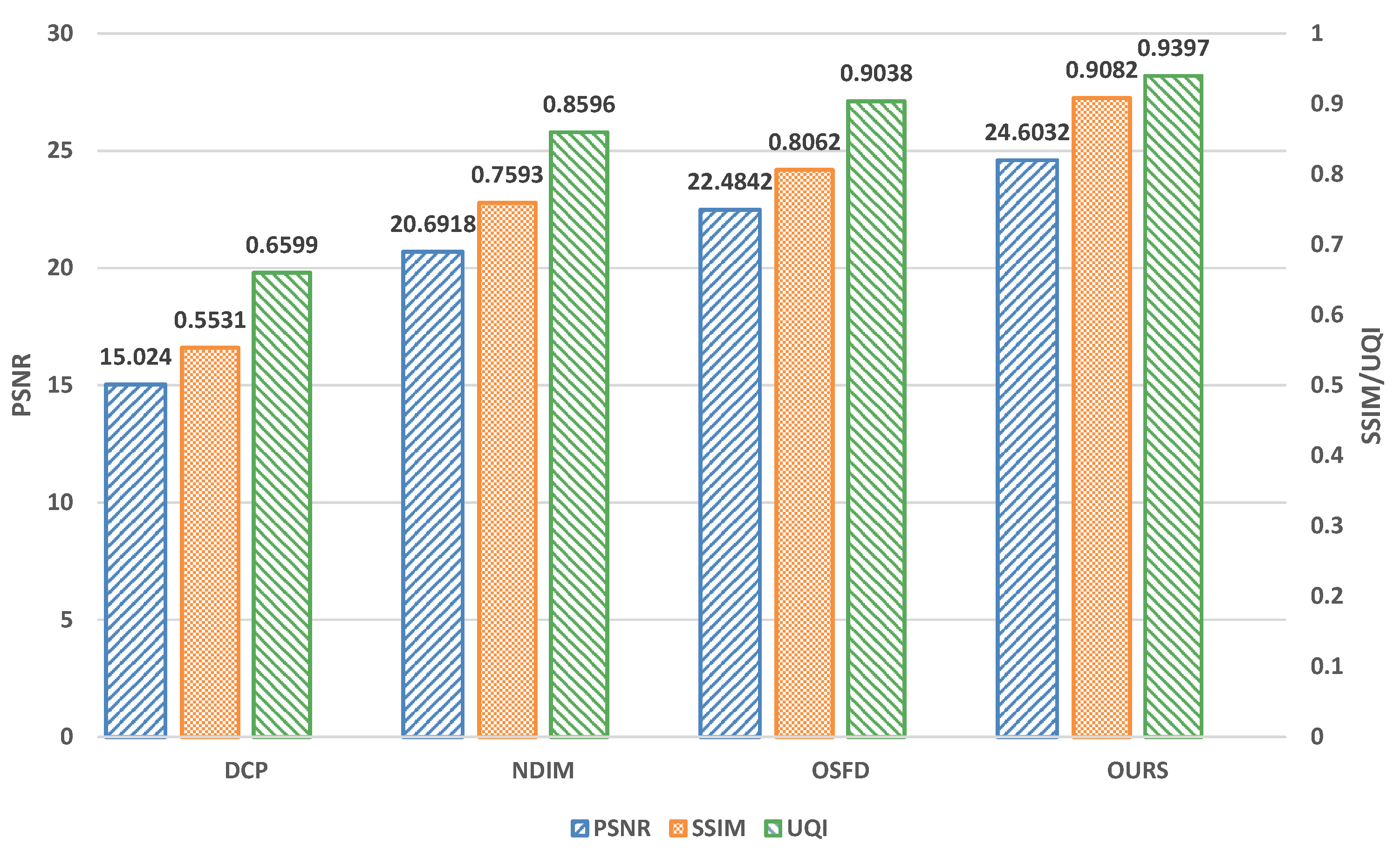
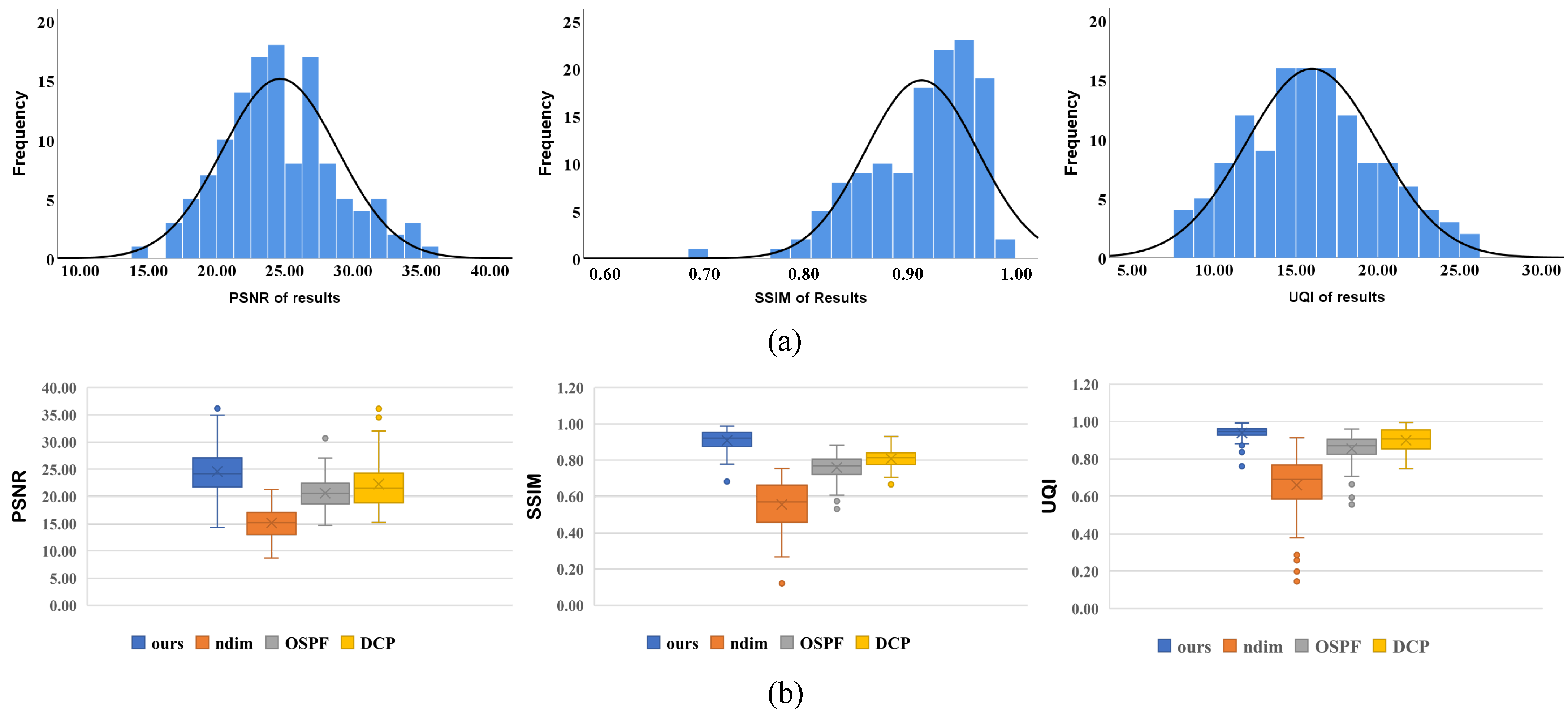
In this paper, a nighttime dehazing algorithm based on the light source influence matrix is proposed for the foggy environment at night. Different from the DCP estimation method of constant atmospheric light values, our light source influence matrix is more suitable for night scenes. Furthermore, the processed image by our method does not occur overexposed near the light source. To enhance the detail of image, an edge filter is introduced to fuse the transmittance of the near and far light source areas, and the correction with MRP makes the image more colorful. In addition, we introduce bias coefficients to make the algorithm effective in dense fog situations. Therefore, our method is better adapted to night scenes. The performance of the algorithm is quantitatively analyzed from three aspects: PSNR, SSIM, and UQI. The experimental results show that the proposed algorithm is effective in removing fog at night. In terms of PSNR, SSIM, and UQI, this method improves 34%, 22%, and 21% over the existed night-time defogging method OSPF. However, the time complexity of the algorithm increases as the size of the image increases. Refining the dark part and maintaining the time complexity is the main direction of future research. With the development of artificial intelligence, 5G communication, and other technologies, the next step will be to improve the dehazing algorithm to achieve video stream dehazing, or integrate the dehazing algorithm improvement into the target detection field.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}