This section presents a review of existing techniques from the aspects of Cluster Head Selection (CHS) approaches and Message Dissemination (MD) approaches.
2.1. CHS Approaches
The mobility-aware Single Hop Clustering (MOSIC) technique accommodates the global network topology and improves scalability [
26]. Gaussian Markov Mobility (GMM) is employed to find out the mobility relative of the vehicles to form stable clusters. The designed technique has increased the duration of CH and CM in the long term and controlled the overheads. It does not perform better in urban traffic scenarios. A self-organized clustering architecture [
27] for dense traffic scenarios is studied using a 1-hop clustering approach. The designed CHS algorithm includes the independent set problem and secret-key agreement scheme. The distributed clustering architecture has ensured network communication efficiency. However, the CHs are easily compromised by passive attackers. According to the needs of traffic scenarios, a Chain Branch Leaf (CBL) clustering scheme [
28] is designed to increase the CH’s stability by aligning with the relative variables of vehicular nodes. It supported both unicast and multicast message exchange services. However, the designed CBL could not cope up with the heavy traffic conditions.
The frequent network topology changes have considerably affected the CH stability. The time variations in inter-vehicles were studied using the stochastic mobility model [
29]. They projected the estimated time variations into the Markov chain system with the distance metric. Finally, they observed the behaviors of clustered nodes using queuing theory. Though the designed model has ensured proper communication, the un-clustered nodes near neighboring CHs have increased the overheads. Moth Flame Optimizer [
30] is studied to develop an intelligent clustering environment. The behavior of moth flame is employed to select the CH. It minimizes the routing cost for the entire network’s communication by efficiently reducing the required number of clusters. The mobility characteristics of the vehicular nodes are limited that could not suit the real-time traffic scenarios. An adjusted k-medoids clustering scheme [
31] is designed to ensure the CH’s stability and routing link quality. Here, the frequency of node disconnection is used to estimate the k-values. This model has achieved more stability and robustness with the high convergence data speed.
In coordination with the technological improvements, the Internet of Vehicles (IoVs) has emerged in conventional VANETs. To enhance the performances of Inter-Vehicular communication systems, a multi-hop clustering scheme [
32] is designed. Here, the RSUs were prepared according to the traffic needs. The messages are broadcasted under the multi-hop neighbor approach. The mobility of vehicular nodes was estimated using the breadth-first search algorithm that included the CHS and CH duration. It is evaluated using NS-2 and VANETMobiSim tools. The message delivery ratio is higher in regular road traffic than heavy road traffic due to the global network information. The combination of dynamic and stability-based clustering schemes [
33] is designed for urban city scenarios. The formation of a temporary CH and the safe distance threshold estimation has increased cluster stability performance. Compared with the lowest-ID algorithm, it proved the stability performance in terms of better cluster member disconnection frequency and efficiency. The concept of the multi-hops model is not studied under data aggregation and dissemination. The clusters efficiency was analyzed using a direction-aware clustering scheme [
34]. Clusters were administered independently and reconfigured locally according to the traversal of vehicles. The invasions of channel access and allocated time slots to the cluster members have significantly improved the cluster stability in a dynamic environment. In order to ensure better channel access, the CM makes use of Control Channel Period (CCP) and Service Channel Period (SCP).
Many studies have considerably studied CH formation rather than CHS and management. In safety applications, the management of unstable clusters is essential. It is checked by introducing the Enhanced Weight-based Clustering Algorithm (EWCA) [
35]. Here, each vehicle was interlinked with the predefined weight value based on its energy level. The vehicle that has the highest weight value is the selected primary CH. By doing so, the author has observed 40–50% improved performance in cluster stability. However, the message delivery rate has been reduced due to security constraints. A resilient Double-Head Clustering (DHC) [
36] algorithm was designed to increase cluster stability and management. Along with the mobility-related metrics, the analysis of Link Expiration Time (LET) and the Signal-to-Noise Ratio (SNR) has been estimated to manage the dynamic CHs. The DHC model has improved the communication efficiency in dynamic urban scenarios over prior schemes. Yet, the packet loss reduction needs to be more focused under different traffic conditions.
2.2. MD Approaches
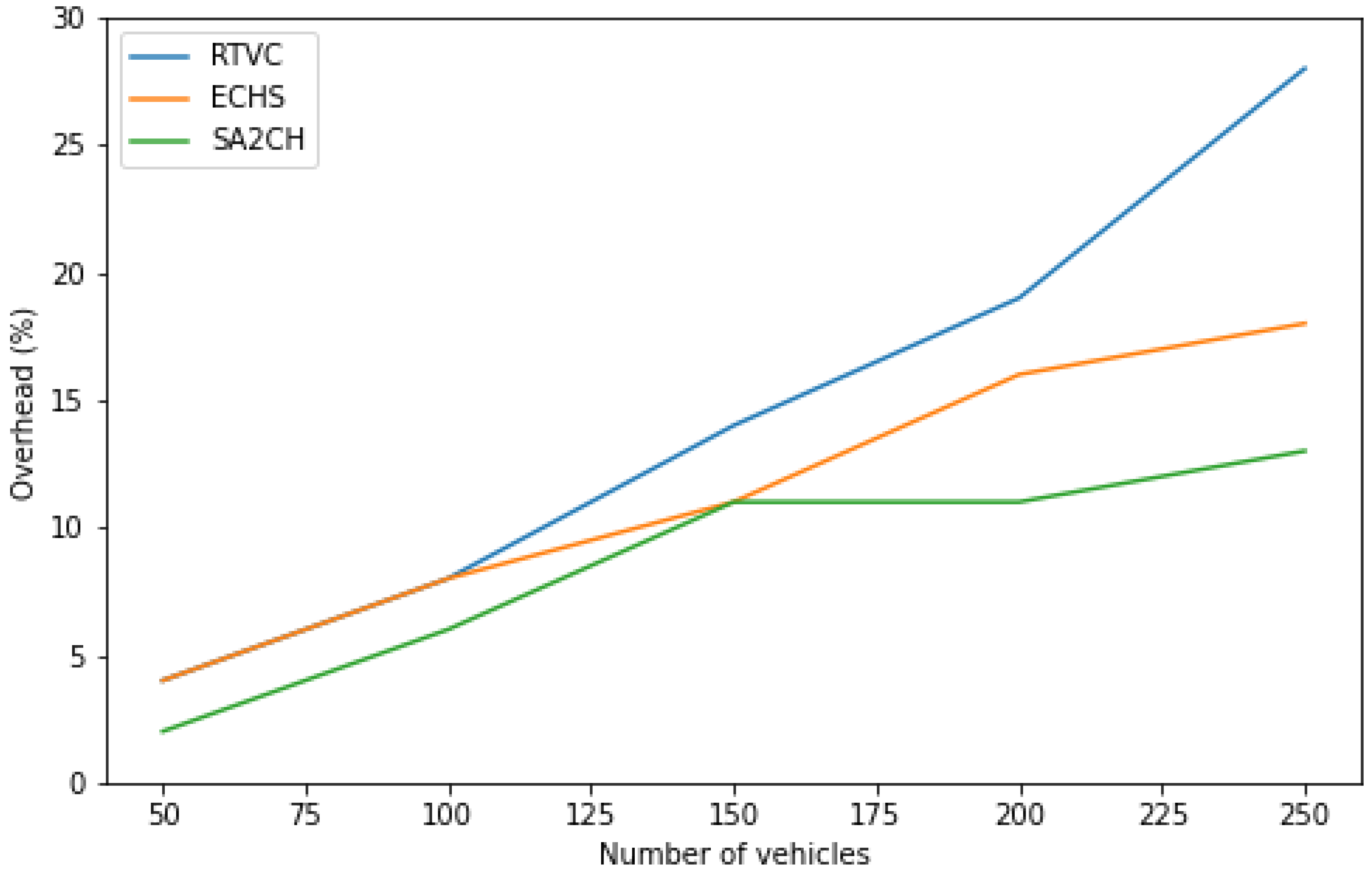
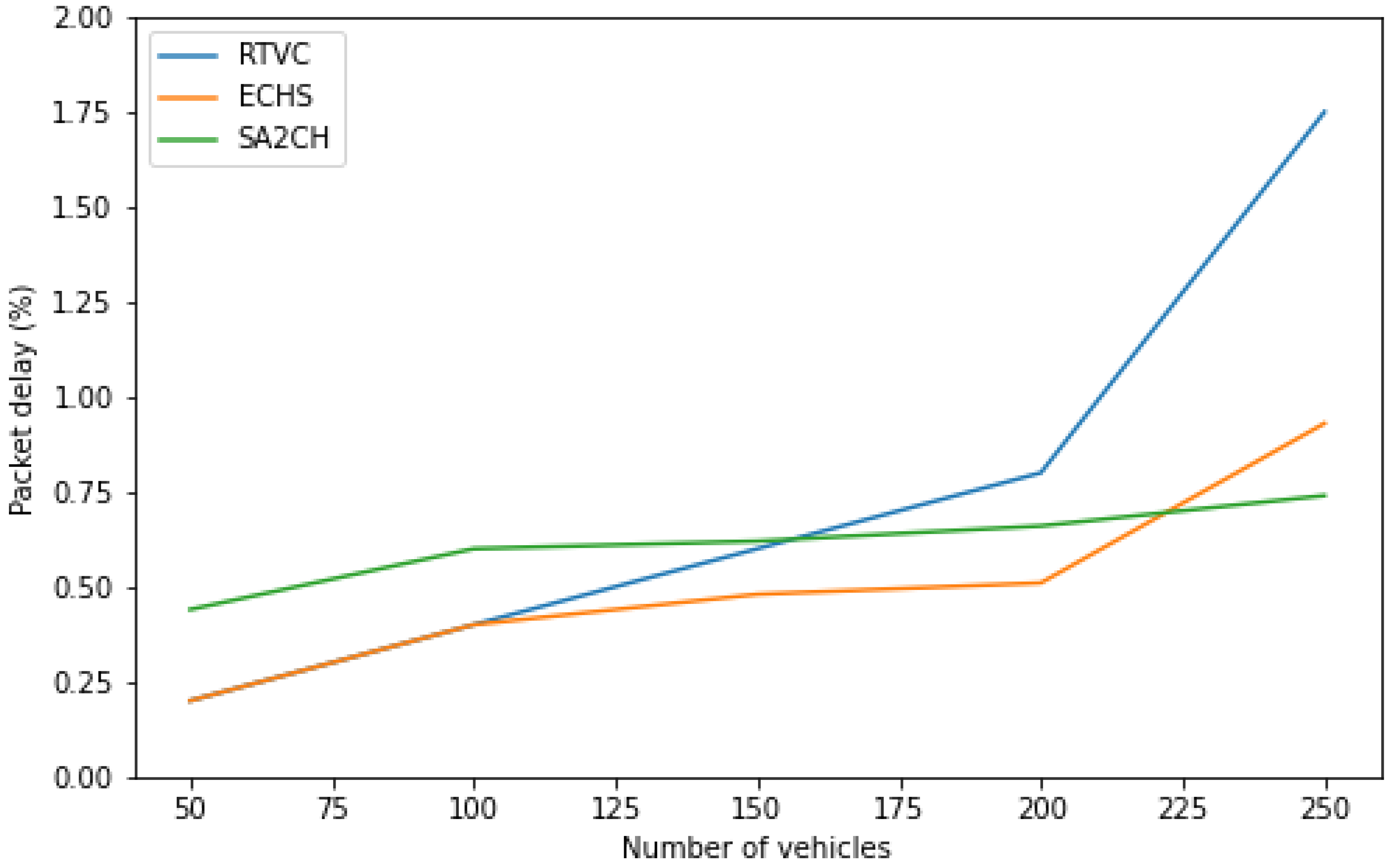
Inefficiency in immediate message dissemination in urban and highway scenarios was observed. Hence, the RTVC framework [
37], which consists of a VANET cluster scheme (VCS) and VANET multicast routing (VMR) were designed. It has enhanced the link quality of the communication process, high mobility, and better throughput rate. The vehicle speed’s adjustment has achieved the objectives of stability, efficiency, and message dissemination. Due to dynamic topology, the packet delivery rate is still in the developmental stage, especially in the fast mobility of nodes. Therefore, Clustering and Probabilistic Broadcasting (CPB) [
38] is designed to exchange information under sufficient connection duration. Connection duration limit is estimated from the aggregation of probability-based data obtained from CH and CM. This scheme has significantly reduced the packet loss and the overlapping in clusters formation. In [
39], the segment-based safety message broadcasting for clustered VANET environment is studied. The study explored the cluster formation, collision avoidance, and safety message broadcasting in developing a stable vehicular environment. CH formation is conducted by Variant-Based Clustering (VBC), and it is elected by the Chaotic Crow Search (CCS) algorithm. Segment-based Forwarder Selection (SFS) scheme is deployed to broadcast the safety message via the optimized channel. It acted as an optimizer using the Fuzzy-Vikor method. The simulated experiments have proven the cluster stability and reduced the broadcast storm and network collision issues. Compared to the previous models, the designed model has shown 55% improved performance.
Advanced Speed and Density Warning Message (ASDWM) scheme [
40] was designed to suit highway scenarios. The developed model, related to the road condition and vehicle speed, delivered the warning messages. By doing so, the authors have achieved the issue of rebroadcasting and Reachability of vehicles. Additionally, low end-to-end latency is achieved during the broadcasting process. Compared to the message flooding scheme, the ASDWM scheme has shown considerable effects. However, it is not suitable for real-life scenarios. Dedicated Short-Range Communication (DSRC) technology is deployed to integrate the cluster-based VANETs with 5G cellular networks. SDN-Enabled Social-Aware Clustering (SESAC) algorithm [
41] in the 5G-VANET system is designed to enhance the cluster’s stability by predicting the social patterns of vehicles routes. The movement of vehicles at each round was monitored and assessed using the discrete time-homogeneous semi-Markov model. Simulations experiment on cluster overhead with cluster velocity, and density at different road conditions were observed. It has had a positive impact on node connectivity. However, the designed model has used a high communication range.
A cross-layer cluster-based routing approach [
42] is studied to deliver multimedia data for reliable VANETs. The author has suggested a Cross-Layer Autonomous Route Recovery (CLARR) mechanism and a new Cross-Layer Cluster-based Routing (CCBR) protocol. The results have stated that 60% improved performance in reducing the overall communication delay tested under diverse vehicle velocity and density sets. A hybrid clustering algorithm that included geographic- and context-based clustering approaches [
43] was studied to minimize the effects of control overhead and network traffic. The deployment of inter-clustering routing is to have predefined details on destination nodes. The experimental results have shown more minor delays in lower and higher vehicular speeds than the conventional schemes. And also, fewer control messages are used for message aggregation and dissemination. A Prediction-based Multi-Role Classification community clustering method (PMRC) [
44] was designed to assist healthcare applications. Low stability and high data distortion were observed in medical vehicles. The load balancing approach is employed to know the mobility-related metrics on medical vehicles. Based on the roles, the vehicles were clustered. The vehicles with high loads were organized using CH and gateway nodes. The system achieved the objectives of improving the packet delivery rate, thereby reducing data distortion. Intelligent cluster head routing protocol (ICHR) [
45] is designed to enhance network connectivity in the case of RSUs failure. They recommended alternate paths by introducing Chain-based Ant Colony Optimization (C-ACO). They considered the density and speed of nodes and the distance from RSUs to select the CH. The system has achieved better connectivity time, cluster stability, and critical message transmission for highway scenarios.
From the above conducted reviews, it is understood that the development of clustering-based approaches needs to be explored. The research questions answered in this article are as follows:
Many factors distort the clustering process such as immediate amendments in network topology, forecasting the directions, scalability, signal fading loss, behavior of drivers, lifetime of network entities and the mobility pattern of high speed vehicles. With the help of clustering schemes, the choice of forecasting the network parameters is a difficult task. An improper selection of CHs and CMs has a strong influence over the packet loss and delayed transmission.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}