



An Emergency Driving Intervention System Designed for Driver Disability Scenarios Based on Emergency Risk Field

Abstract
1. Introduction
2. Literature Review
- An emergency safety field (ESF) module designed to assess traffic hazards with the specific aim of autonomous emergency parking in driver disability scenarios.
- A path–velocity-coupled motion planning algorithm based on the ESF module, proposed for pull-over maneuvers in dynamic traffic.
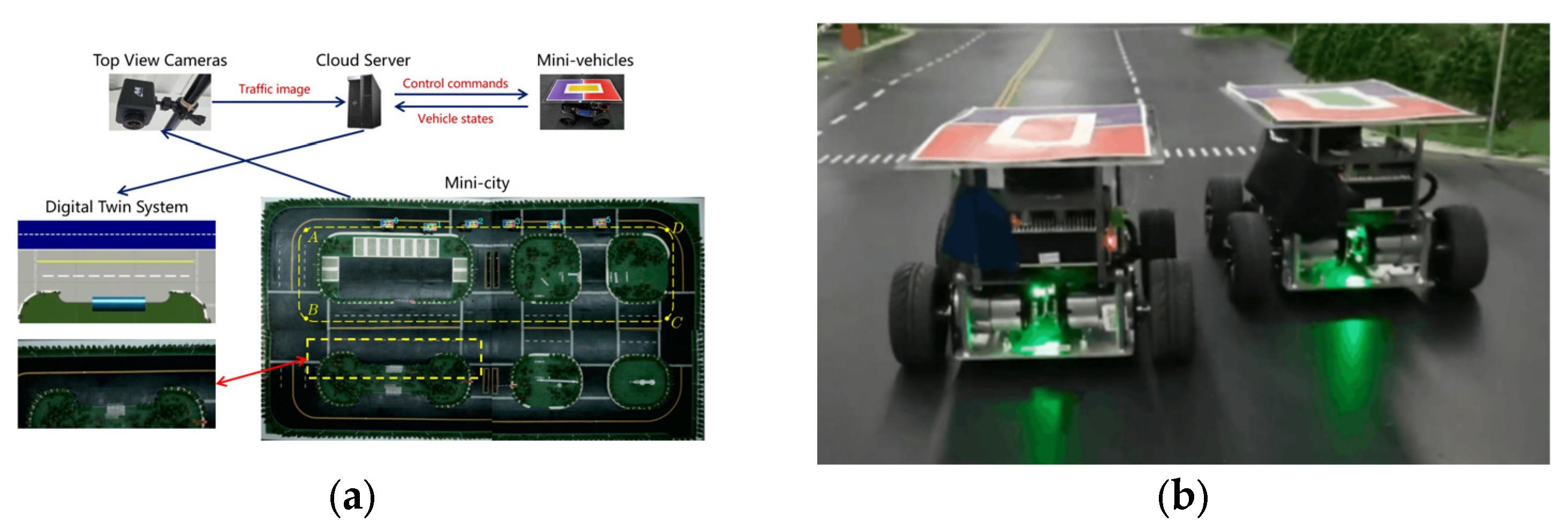
- Verification of the advantages of the proposed method in safety, efficiency, and adaptability with both simulations and real experiments.
3. Methodology
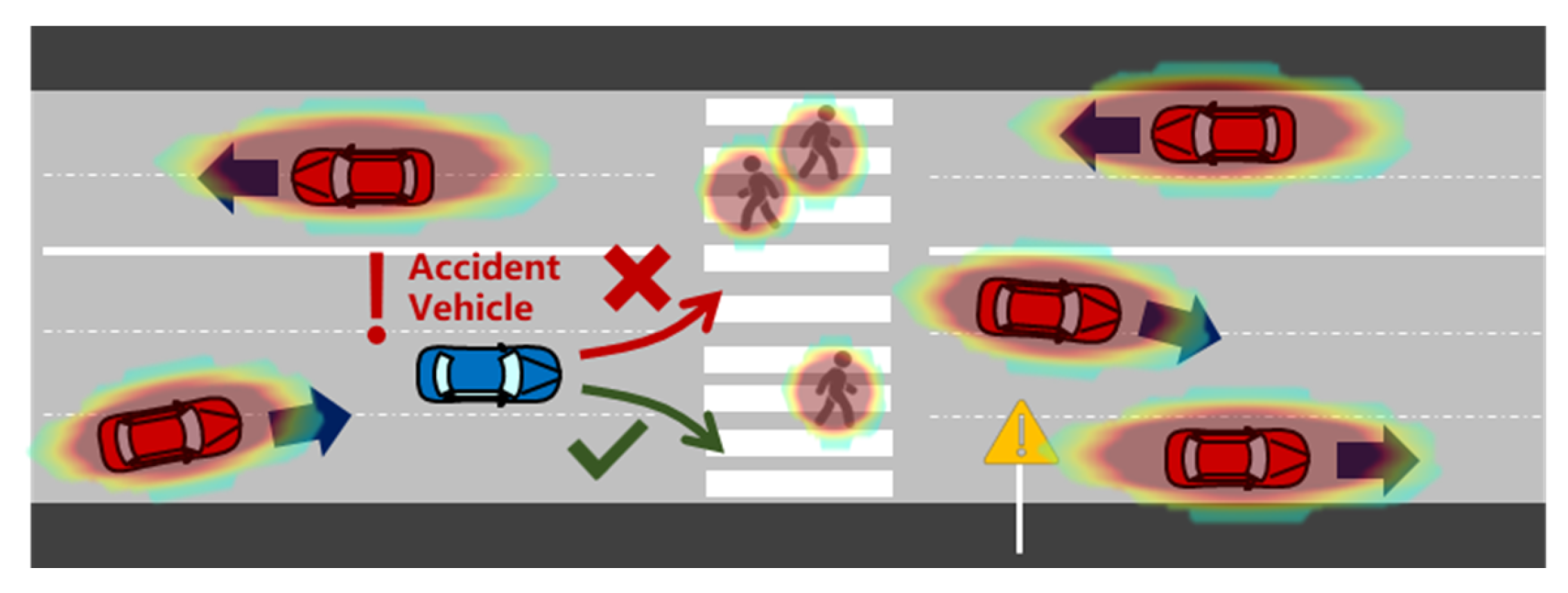
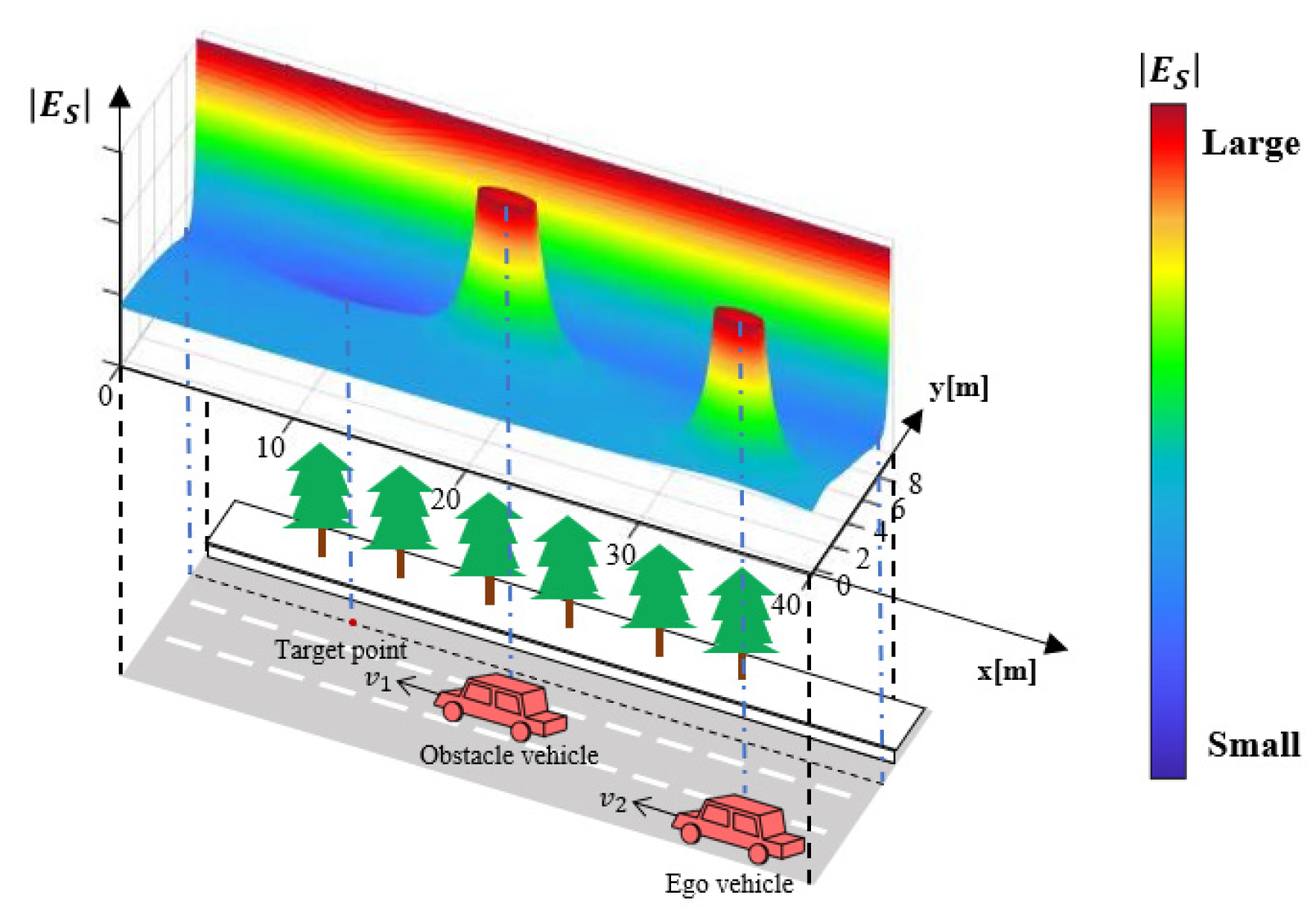
3.1. Emergency Safety Field
3.1.1. Analysis of Emergency Safety
3.1.2. Boundary Risk Field
3.1.3. Obstacle Risk Field
3.1.4. Target Attraction Field
3.1.5. Field Superposition
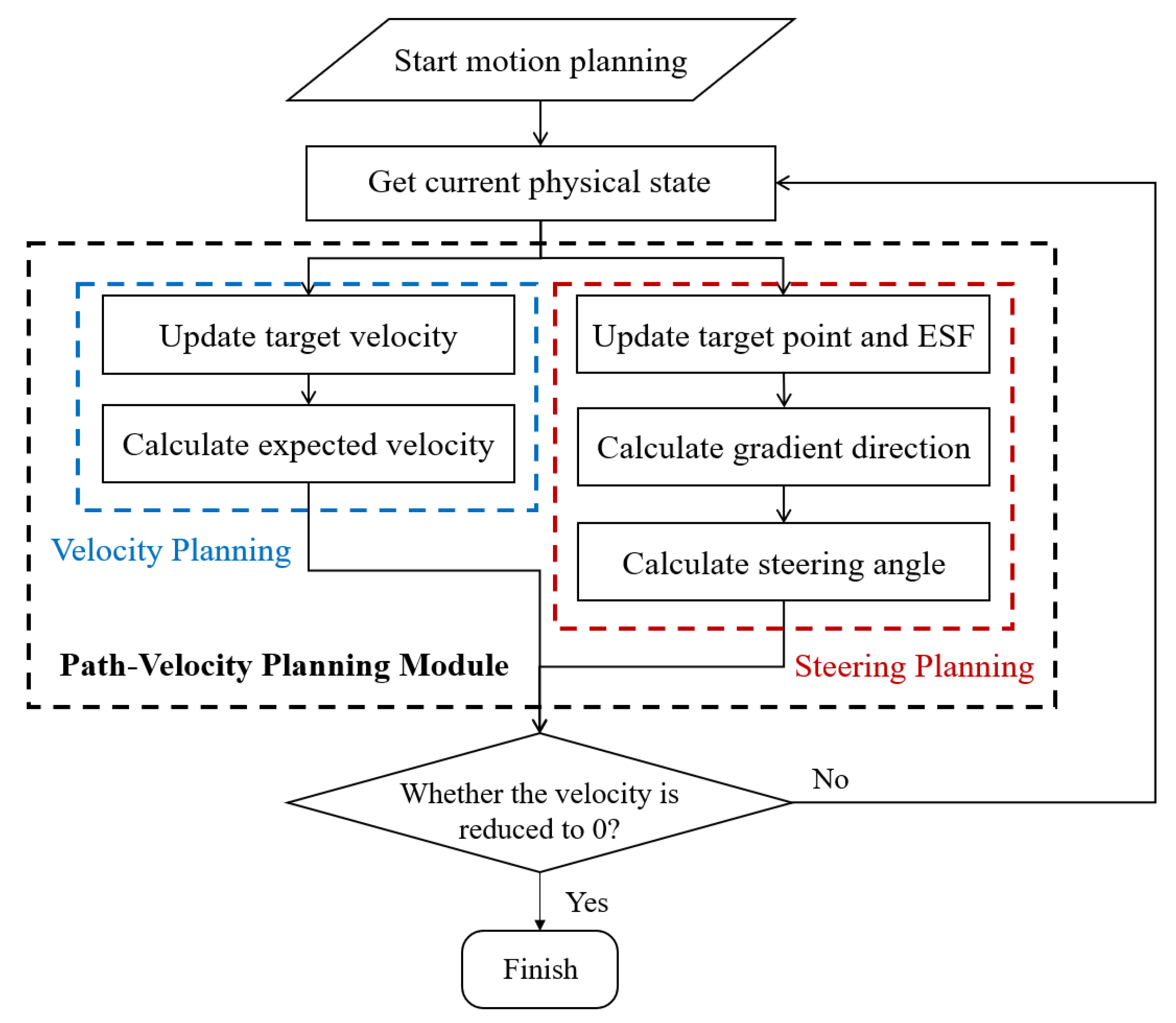
3.2. Motion Planning
- Inexecutable generated path: usually, the vehicle’s dynamics are not considered, and the generated path with curvature or acceleration beyond the vehicle’s limits cannot be executed.
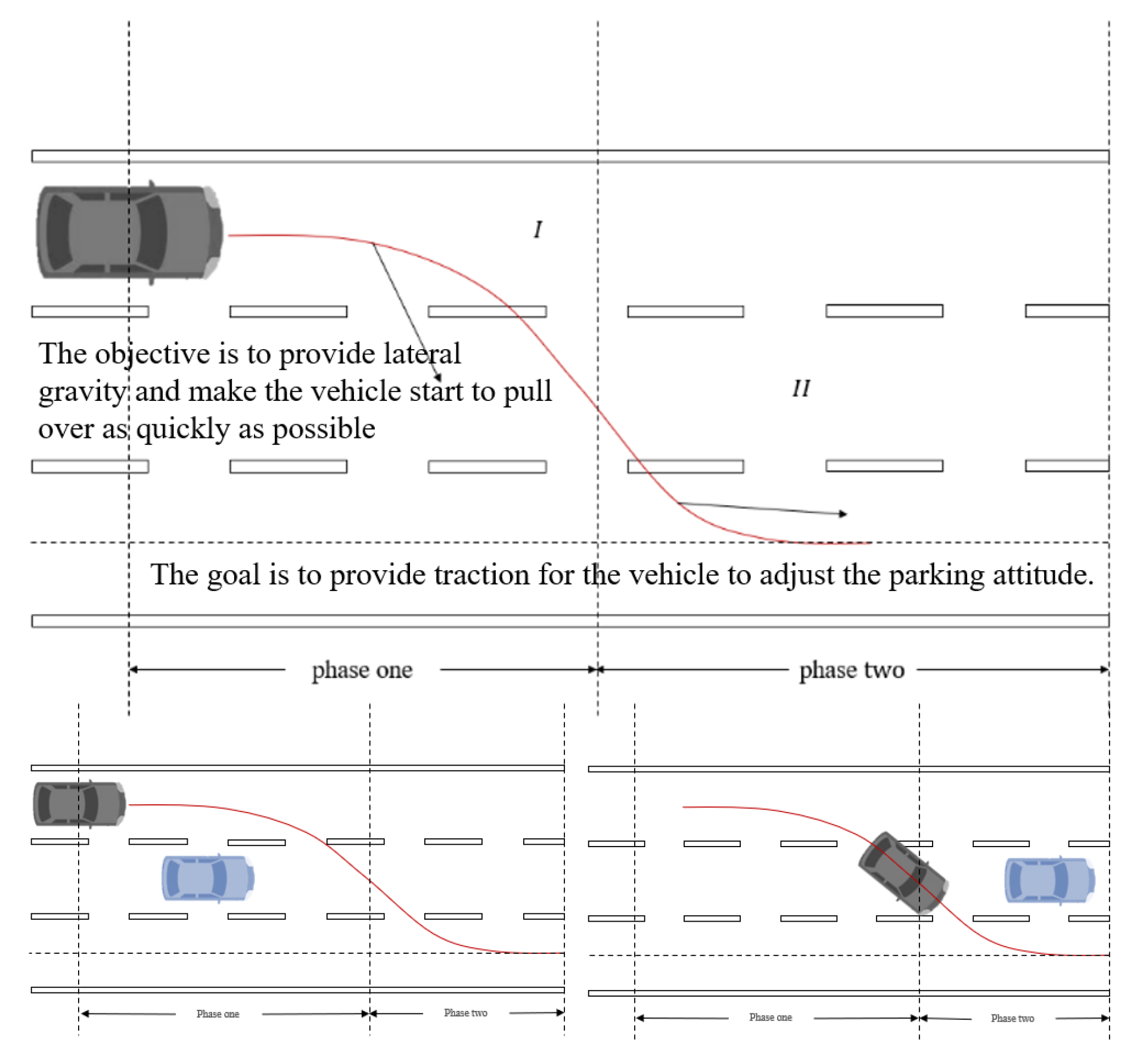
- Unreachable stop state: When the car arrives near the target point, due to periodic gravity, instead of stopping at the target point instantly, the car will periodically move around the target point instead.
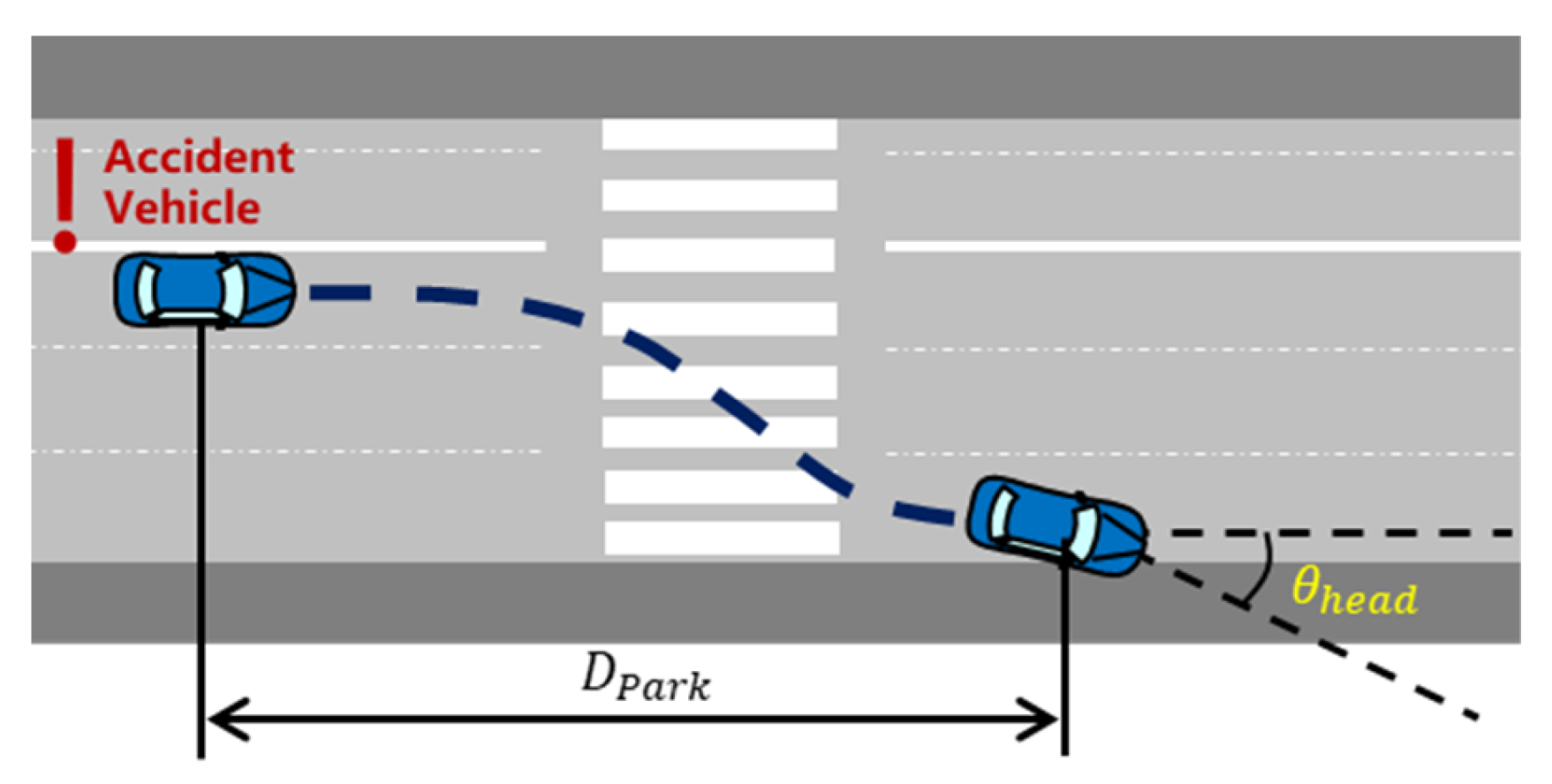
- Unsafe parking pose: Though the vehicle can reach the target point and stop safely, an unsafe parking pose, e.g., with high heading angle error, may lead to secondary accidents.
3.2.1. Velocity Planning
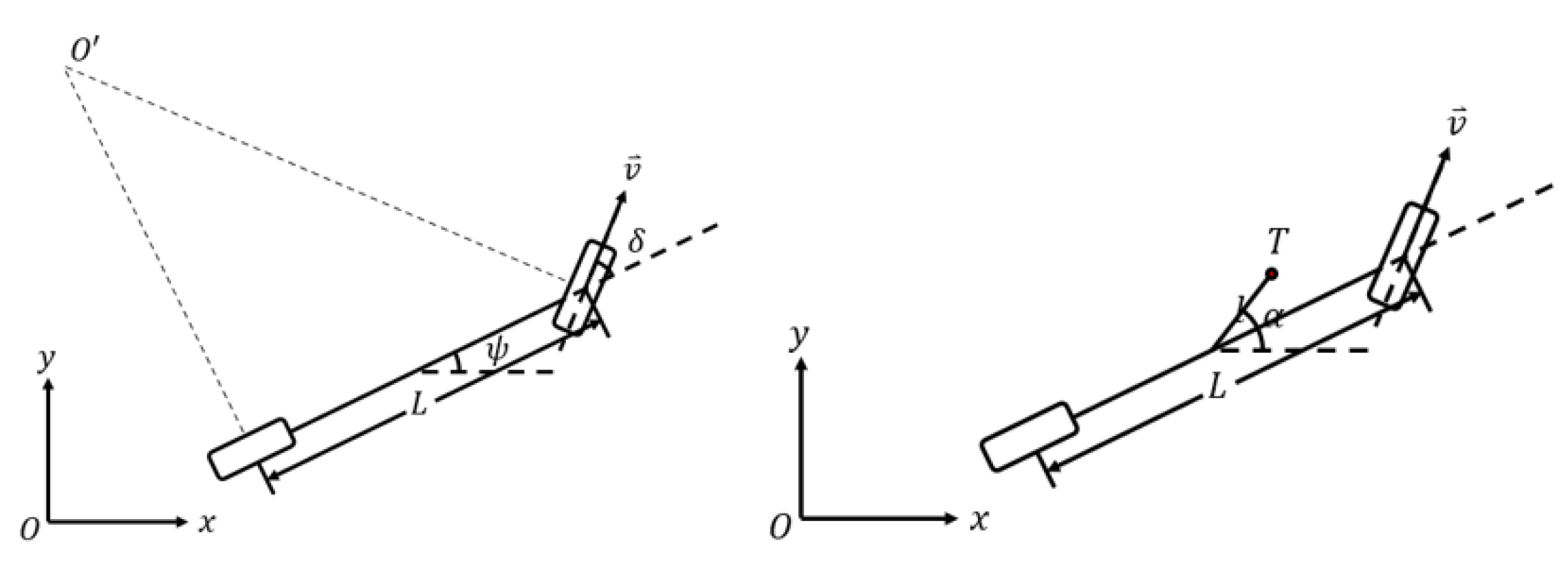
3.2.2. Steering Planning
4. Experiments and Results
4.1. Experiment Conditions, Metrics, and the Baseline
4.2. Experimental Results
4.3. Feasibility Validation
5. Discussion
- Safety. As analyzed in Section 3, the main danger during the process of pulling over is that of the surrounding moving obstacles. Previous risk evaluation models such as TTC, THW, etc. only considered one-dimensional danger; thus, the hedge rates around multiple conflict vehicles decreased drastically. In comparison, field-based risk evaluation considered danger caused from all surrounding sources comprehensively, giving a two-dimensional risk reference for the following motion-planning section. Moreover, the novel regional weighting technique also guaranteed that the ego vehicle did not turn to the dangerous side of the road.
- Efficiency. The reason why our proposed method achieved quicker avoidance is rooted in three innovations. First, the improved boundary risk field set the emergency lane as the location of the lowest risk energy so the ego vehicle was more likely to reach it. Second, the application of the virtual target attraction concept accelerated the process of lateral movement. Third, we designed the target attraction field as a time-varying source instead of the traditional static format. Therefore, slow movement was be punished during motion planning.
- Stability. Better stability, which was reflected by a smaller final heading angle, was realized by applying the velocity–steering-decoupled planning framework. By designing the goal function, the ego vehicle adjusted its pose automatically when approached the emergency lane. A smaller final heading angle gives more convenience for later rescue operations.
- Adaptability. Instead of being scenario-driven, the ESF-based method assessed traffic risk in an emergency situation in accordance with human drivers’ cognition mechanisms. Hence, it does not depend on specific traffic conditions and can be generalized to other scenarios.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cohen, H.S.; Wells, J.; Kimball, K.T.; Owsley, C. Driving disability and dizziness. J. Saf. Res. 2003, 34, 361–369. [Google Scholar] [CrossRef]
- Junjea, K. Multi-featured and conditional probability analysis model for driving-disability identification. In Proceedings of the 2015 Third International Conference on Image Information Processing (ICIIP), Waknaghat, India, 21–24 December 2015. [Google Scholar] [CrossRef]
- Li, J.; Tang, Z. Driver Injury Severity in Truck Rollover Accidents Based on Mixed Ordered Probit Model. J. Chongqing Jiaotong Univ. (Nat. Sci.) 2021, 40, 21–27. [Google Scholar]
- Zhang, L.X. Analysis of effects of driver factors on road traffic accident indexes. CSSJ 2014, 24, 79–84. [Google Scholar]
- Hu, J.; Deng, J. Analysis on Taxonomy of Driving Automation for Vehicles. Environ. Technol. 2020, 38, 192–195. [Google Scholar]
- Hagiwara, T.; Ishizaki, H.; Nakazato, N. Development of Automatic Driving Position Information Positioning System using TACAN Technology. In Proceedings of the 2019 16th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Pattaya, Thailand, 10–13 July 2019. [Google Scholar] [CrossRef]
- Yang, L.; Liu, S. Analysis on the Development Status of ICV. In Proceedings of the 2021 International Wireless Communications and Mobile Computing (IWCMC), Harbin, China, 28 June–02 July 2021. [Google Scholar]
- Cao, J.; Lin, L.; Zhang, J.; Zhang, L.; Wang, Y.; Wang, J. The development and validation of the perceived safety of intelligent connected vehicles scale. Accid. Anal. Prev. 2021, 154, 106092. [Google Scholar] [CrossRef] [PubMed]
- Vinel, A.; Lan, L.; Lyamin, N. Vehicle-to-vehicle communication in C-ACC/platooning scenarios. IEEE Commun. Mag. 2015, 53, 192–197. [Google Scholar] [CrossRef]
- Basjaruddin, N.C.; Kuspriyanto; Suhendar; Saefudin, D.; Aryani, S.A. Lane Keeping Assist System based on fuzzy logic. In Proceedings of the 2015 International Electronics Symposium (IES), Surabaya, Indonesia, 29–30 September 2015. [Google Scholar]
- SAE, I. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles. 2021. Available online: https://www.sae.org/standards/content/j3016_202104/ (accessed on 30 April 2021).
- Bui, D.P.; Balland, S.; Giblin, C.; Jung, A.M.; Kramer, S.; Peng, A.; Aquino, M.C.P.; Griffin, S.; French, D.D.; Porter, K.P.; et al. Interventions and controls to prevent emergency service vehicle incidents: A mixed methods review. Accid. Anal. Prev. 2018, 115, 189–201. [Google Scholar] [CrossRef] [PubMed]
- Cicchino, J.B. Effects of automatic emergency braking systems on pedestrian crash risk. Accid. Anal. Prev. 2022, 172. [Google Scholar] [CrossRef]
- Li, Y.; Li, K.; Zheng, Y.; Morys, B.; Pan, S.; Wang, J. Threat Assessment Techniques in Intelligent Vehicles: A Comparative Survey. IEEE Intell. Transp. Syst. Mag. 2020, 13, 71–91. [Google Scholar] [CrossRef]
- Ma, Y.; Xu, J.; Gao, C.; Mu, M.; E, G.; Gu, C. Review of Research on Road Traffic Operation Risk Prevention and Control. Int. J. Environ. Res. Public Health 2022, 19, 12115. [Google Scholar] [CrossRef]
- Staubin, P.; Saunier, N.; Mirandamoreno, L.F. Comparison of Various Time-to-Collision Prediction and Aggregation Methods for Surrogate Safety Analysis. Transportation Research Board Annual Meeting. 2015. Available online: https://www.authorea.com/users/6570/articles/8297-comparison-of-various-time-to-collision-prediction-and-aggregation-methods-for-surrogate-safety-analysis (accessed on 1 December 2015).
- Chen, Y.; Fu, R.; Xu, Q.; Yuan, W. Mobile Phone Use in a Car-Following Situation: Impact on Time Headway and Effectiveness of Driver’s Rear-End Risk Compensation Behavior via a Driving Simulator Study. Int. J. Environ. Res. Public Health 2020, 17, 1328. [Google Scholar] [CrossRef]
- Loeb, H.S.; Vo-Phamhi, E.; Seacrist, T.; Maheshwari, J.; Yang, C. Vehicle Automation Emergency Scenario: Using a Driving Simulator to Assess the Impact of Hand and Foot Placement on Reaction Time 2021. Available online: https://ppms.cit.cmu.edu/media/project_files/2021_Loeb_VehicleAutomationEmergencyScenario-UsingaDrivingSimulatortoAssesstheImpactofHandandFootPlacementonReactionTime.pdf (accessed on 6 April 2021).
- Hayward, J.C. Near-miss determination through use of a scale of danger. Highw. Res. Rec. Available online: http://onlinepubs.trb.org/Onlinepubs/hrr/1972/384/384-004.pdf (accessed on 6 April 2021).
- Doi, A. Development of a rear-end collision avoidance system with automatic brake control. Jsae Rev. 1994, 15, 335–340. [Google Scholar] [CrossRef]
- Karlsson, R.; Jansson, J.; Gustafsson, F. Model-based statistical tracking and decision making for collision avoidance application. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–02 July 2004. [Google Scholar]
- Abdulwahid, S.N.; Mahmoud, M.A.; Ibrahim, N.; Zaidan, B.B.; Ameen, H.A. Modeling Motorcyclists’ Aggressive Driving Behavior Using Computational and Statistical Analysis of Real-Time Driving Data to Improve Road Safety and Reduce Accidents. Int. J. Environ. Res. Public Health 2022, 19, 7704. [Google Scholar] [CrossRef]
- Jansson, J.; Johansson, J.; Gustafsson, P.F. Decision Making for Collision Avoidance Systems. Available online: https://www.jstor.org/stable/44699413 (accessed on 22 January 2023).
- Wang, J.Q.; Wu, J.; Li, Y. Concept, principle and modeling of driving risk field based on driver-vehicle-road interaction. Available online: http://zgglxb.chd.edu.cn/EN/Y2016/V29/I1/105 (accessed on 6 April 2021).
- Rossetter, E.J.; Gerdes, J.C. Lyapunov Based Performance Guarantees for the Potential Field Lane-keeping Assistance System. J. Dyn. Syst. Meas. Control 2005, 128, 510–522. [Google Scholar] [CrossRef]
- Raksincharoensak, P.; Akamatsu, Y.; Moro, K.; Nagai, M. Predictive Braking Assistance System for Intersection Safety Based on Risk Potential. IFAC Proc. Vol. 2013, 46, 335–340. [Google Scholar] [CrossRef]
- Schwarting, W.; Alonso-Mora, J.; Rus, D. Planning and Decision-Making for Autonomous Vehicles. Annu. Rev. Control. Robot. Auton. Syst. 2018, 1, 187–210. [Google Scholar] [CrossRef]
- Ioannis, K.; Michael, G.H.; Klaus, B.; Chen, Y. Approach to Time Dependence and Reliability in Dynamic Route Guidance. Transportation Research Record 2018, 2039, 32–41. [Google Scholar] [CrossRef]
- Xu, W.; Wei, J.; Dolan, J.M.; Zhao, H.; Zha, H. A real-time motion planner with trajectory optimization for autonomous vehicles. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012. [Google Scholar]
- González, D.; Pérez, J.; Lattarulo, R.; Milanés, V.; Nashashibi, F. Continuous curvature planning with obstacle avoidance capabilities in urban scenarios. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014. [Google Scholar]
- Chen, T.; Zhang, Q. Robot motion planning based on improved artificial potential field. In Proceedings of the 2013 3rd International Conference on Computer Science and Network Technology, Dalian, China, 12–13 October 2013. [Google Scholar]
- Wahid, N.; Zamzuri, H.; Rahman, M.A.A.; Kuroda, S.; Raksincharoensak, P. Study on potential field based motion planning and control for automated vehicle collision avoidance systems. In Proceedings of the IEEE International Conference on Mechatronics, Churchill, VIC, Australia, 13–15 February 2017; pp. 208–213. [Google Scholar]
- Zheng, X.; Huang, H.; Wang, J.; Zhao, X.; Xu, Q. Behavioral decision-making model of the intelligent vehicle based on driving risk assessment. Comput. Civ. Infrastruct. Eng. 2019, 36, 820–837. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, P.; Hu, B. Active lane-changing model of vehicle in B-type weaving region based on potential energy field theory. Phys. A Stat. Mech. Appl. 2019, 535, 122291. [Google Scholar] [CrossRef]
- Lyu, N.; Wen, J.; Hao, W. Lane-Level Regional Risk Prediction of Mainline at Freeway Diverge Area. Int. J. Environ. Res. Public Health 2022, 19, 5867. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Flocking for Multi-Agent Dynamic Systems: Algorithms and Theory. IEEE Trans. Autom. Control 2006, 51, 401–420. [Google Scholar] [CrossRef]
- Byrne, S.; Naeem, W.; Ferguson, S. Improved APF strategies for dual-arm local motion planning. Trans. Inst. Meas. Control 2014, 37, 73–90. [Google Scholar] [CrossRef]
- Duan, J.; Li, R.; Hou, L.; Wang, W.; Li, G.; Li, S.E.; Cheng, B.; Gao, H. Driver braking behavior analysis to improve autonomous emergency braking systems in typical Chinese vehicle-bicycle conflicts. Accid. Anal. Prev. 2017, 108, 74–82. [Google Scholar] [CrossRef] [PubMed]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conflict Obstacles | Parking Action | Parking Distance | Hedge Time | Hedge Rate | ||
|---|---|---|---|---|---|---|
| TTC Planning | 1 | 3.95 | 5.54 | 38.50 | 9.33 | 95.00% |
| ESF Planning | 3.39 | 2.26 | 27.54 | 7.67 | 100.00% | |
| Improvement | 14.18% | 59.21% | 28.47% | 17.79% | 5.26% | |
| TTC Planning | 2 | 4.57 | 5.40 | 38.77 | 9.61 | 84.38% |
| ESF Planning | 3.57 | 2.74 | 31.95 | 8.17 | 93.75% | |
| Improvement | 21.88% | 49.26% | 17.59% | 14.98% | 11.10% | |
| TTC Planning | 3 | 4.66 | 5.31 | 39.35 | 9.75 | 75.78% |
| ESF Planning | 3.84 | 3.16 | 33.18 | 8.70 | 87.50% | |
| Improvement | 17.60% | 40.49% | 15.68% | 10.77% | 15.47% | |
| TTC Planning | 4 | 5.62 | 5.05 | 38.94 | 9.81 | 70.00% |
| ESF Planning | 4.98 | 3.31 | 33.48 | 8.87 | 83.75% | |
| Improvement | 11.39% | 34.46% | 14.02% | 9.58% | 19.64% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Yang, S.; Li, J.; Xu, S.; Wang, J. An Emergency Driving Intervention System Designed for Driver Disability Scenarios Based on Emergency Risk Field. Int. J. Environ. Res. Public Health 2023, 20, 2278. https://doi.org/10.3390/ijerph20032278
Wang Y, Yang S, Li J, Xu S, Wang J. An Emergency Driving Intervention System Designed for Driver Disability Scenarios Based on Emergency Risk Field. International Journal of Environmental Research and Public Health. 2023; 20(3):2278. https://doi.org/10.3390/ijerph20032278
Chicago/Turabian StyleWang, Yuning, Shuocheng Yang, Jinhao Li, Shaobing Xu, and Jianqiang Wang. 2023. "An Emergency Driving Intervention System Designed for Driver Disability Scenarios Based on Emergency Risk Field" International Journal of Environmental Research and Public Health 20, no. 3: 2278. https://doi.org/10.3390/ijerph20032278
APA StyleWang, Y., Yang, S., Li, J., Xu, S., & Wang, J. (2023). An Emergency Driving Intervention System Designed for Driver Disability Scenarios Based on Emergency Risk Field. International Journal of Environmental Research and Public Health, 20(3), 2278. https://doi.org/10.3390/ijerph20032278