1. Introduction
Domestic and international studies have shown that more than 90% of traffic accidents are due to human factors [
1], and one of the reasons for this phenomenon is that drivers are generally prone to overestimate their driving ability and misjudge the risks in a road environment [
2,
3]. The difference between a driver’s perceived subjective risk and objective risk influences their choice of driving behavior [
4]. Drivers may engage in aggressive driving behavior or fail to avoid hazards in a timely manner if their subjective level of perceived risk is low. Related studies have pointed out that drivers who accurately judge risks and react appropriately can significantly reduce the occurrence of traffic accidents, whereas drivers who underestimate driving risks tend to be more prone to unconscious unsafe behaviors. Hence, it is important to study the factors influencing a driver’s underestimation of the risk to improve road safety.
Since the development of research in traffic safety, the factors influencing a driver’s tendency to underestimate the risk have been of interest to researchers in various countries, and some generally accepted, well-documented results and conclusions have been obtained. These studies mainly focused on the influence of driver characteristics on driver risk assessment. The differences between individual driver characteristics are found to affect their risk assessment, with driver gender being one of the main variables related to drivers, and its effect on risk assessment has been validated in many studies. Male drivers typically underestimate the potential risks in a traffic environment and are more likely to engage in unsafe driving behaviors [
5,
6,
7]. In fact, behaviorally relevant studies have found that the high interest in cars and driving traditionally exhibited by males may lead to higher levels of skill and knowledge [
8], which may lead to a high degree of confidence in their driving ability, whereas female drivers are more cautious and therefore make fewer violations than male drivers; however, female drivers are prone to make more operational errors while driving [
9]. Overconfidence can reduce a driver’s risk perception and adversely affect driving performance [
10,
11]. Age differences have also been found in the tendency to underestimate risk; Rundmo and Iversen found that young drivers are slower and less efficient at detecting hazards [
12]. This may be due to their driving inexperience and their weak perception of risk, which increases their tendency to underestimate the risk [
13]. Compared to younger drivers, older drivers tend to overestimate the risk and have difficulty detecting unexpected, complex hazards. The risk-adaptation theory (RAT), however, states that a driver’s perception of risk is negatively related to his/her experience. The theory suggests that experienced drivers tend to have higher levels of risk acceptability, making it easier for them to underestimate the magnitude of objective risks [
14]. There are significant differences in the attitudes toward risk and risk classification guidelines among experienced drivers. Because of these differences, novice drivers are often overwhelmed when faced with risks, whereas skilled drivers can quickly identify risks and take effective measures in a timely manner. There is an evident cross-talk between single factors, such as gender, age, and experience, which lack scientific validity as independent factors for judging a driver’s underestimation of risk. Meanwhile, objective factors, such as the gender, age, and experience, affect a driver’s psychological intrinsic factors to varying degrees [
15,
16], in turn affecting the estimation level of the driving risk. However, few studies have explained risk perception mechanisms in terms of the intrinsic factors. Hence, it is necessary to analyze the mechanisms of a driver’s tendency to underestimate the risk in terms of the intrinsic factors such as psychology and personality.
Previous studies have shown that the tendency to underestimate risk has multifactorial properties and is inseparable from the intrinsic characteristics of drivers. The theory of planned behavior (TPB) has emerged as a solution to address this issue; it is based on the core idea that behavioral intention is a determinant of behavior and that three cognitive factors, namely the attitude, subjective norm, and perceived behavioral control, jointly influence behavioral intention [
17]; the stronger the behavioral intention, the more likely the manifestation of the behavior. Currently, the TPB has been widely used to explain traffic behaviors, such as fatigue driving [
18], use of mobile communication devices while driving [
19,
20,
21], yielding behavior [
22], and lane grabbing [
23]. The TPB has shown good validity in explaining various human behaviors [
24,
25]; for example, combined with the theory of reasoned action (TRA) and TPB studies in a meta-analysis, Sutton showed that these theoretical models explained, on average, 40–50% of the variance in intentions and 19–38% of the variance in behavior [
24]. This finding is generally accepted in human behavior research [
25]. In summary, the TPB seems to be a feasible approach to study a driver’s underestimation of risky behaviors by examining individual characteristics to analyze specific behaviors and thus improve the predictability of driver intentions [
23]. It has been established that the stronger the driver’s perceived behavioral control, the more likely the driver is to underestimate driving risks [
26]. In addition, there is a significant correlation between risky driving attitudes and risk perception [
27]. Hence, the TPB model can provide a technical support to explore the psychological factors associated with the underestimation of risky driving behavior.
Based on the TPB, this study aimed to thoroughly investigate the tendency of drivers to underestimate driving risk, analyze the mechanism whereby the subjective perceived risk is lower than the objective risk during driving, and improve the prediction accuracy of the underestimated risk influence model by adding a personality trait variable, namely the normlessness. The structural equation model (SEM) is used to test the influence model and finally put forward a quantitative explanation for risk underestimation and to propose targeted measures that can reduce this phenomenon while driving.
The rest of this paper is organized as follows:
Section 2 introduces the hypotheses of the extended TPB (ETPB) and proposed models and related variables.
Section 3 presents the research methodology and the data collected, including the specific items of the questionnaire, the distribution of the participants, and data analysis.
Section 4 includes the questionnaire reliability test, and the results of the validating factor analysis, SEM, model hypothesis test, and significance test of the demographic characteristics on the underestimation of the risk behavior.
Section 5 presents the discussion, including theoretical and practical implications.
Section 6 concludes the paper.
2. Theoretical Background and Model Hypothesis
The TPB was developed from the TRA, and its maturation was marked by the publication of Ajzen’s paper “Theory of Planned Behavior” in 1991 [
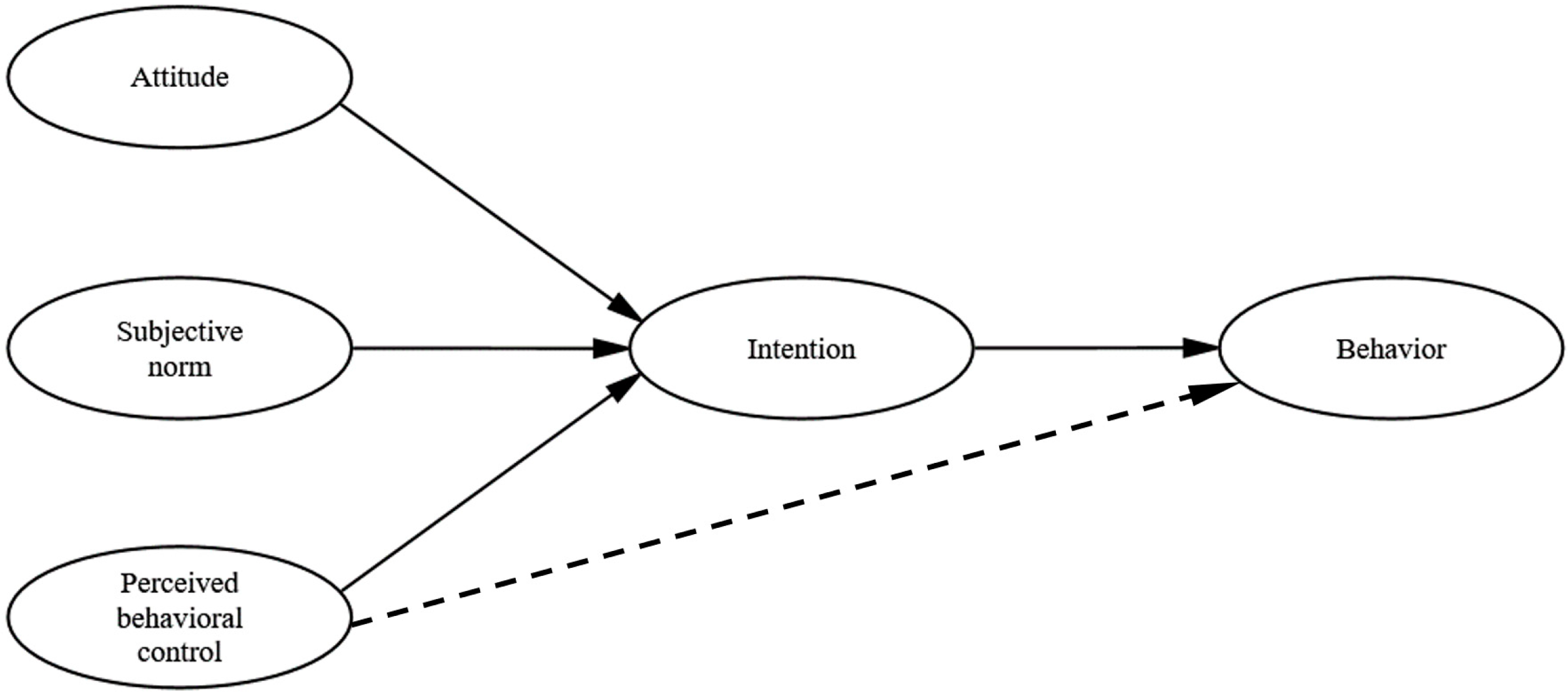
28]. The theory provides an important analytical framework for understanding and predicting individual social behaviors, and its core idea is that behavioral intention (IN) is a determinant of behavior, while three cognitive factors, namely the attitude (ATT), subjective norm (SN), and perceived behavioral control (PBC), jointly influence behavioral intentions [
17].
Figure 1 shows the interrelationships between these variables. The ATT is an individual’s positive or negative evaluation of the behavior; SN is the social pressure felt by the individual to adopt a particular behavior or not. PBC is an individual’s perception of the ease or difficulty of performing a particular behavior. According to the TPB and considering the context of this study, the ATT is the driver’s positive or negative evaluation of the underestimated driving risk; SN is the driver’s perceived social pressure to underestimate the driving risk; the PBC is the driver’s perceived ease of taking an underestimated driving risk, i.e., an assessment of his or her own driving skills and the external environment. The ATT, to a certain extent, reflects a driver’s intention to drive at risk. This in turn influences the driver’s risky driving behavior [
29]. In this study, the more favorable a driver’s attitude toward underestimating the risky behavior, the more likely the driver is to exhibit this behavior; conversely, if a driver has a negative attitude, the less willing he/she is, subjectively, to exhibit this behavior. The SN can reflect the influence of significant others or groups on individual behavioral decisions. When significant others around them strongly advocate a behavior and if they occur frequently, then drivers tend to be inclined to exhibit that behavior. The PBC reflects the ease of drivers in accomplishing the underestimation of the risk behavior; if drivers are subjectively confident in their driving skills and the objective road environment meets the requirements (e.g., low traffic volume), drivers are likely to have the intention to underestimate the risk, in turn prompting them to underestimate the risk. Therefore, this study selects the TPB as the theoretical framework to develop a research model explaining a driver’s tendency to underestimate the driving risk. The following hypotheses are proposed:
Hypothesis 1 (H1). Attitude to underestimate the driving risk positively influences the intention to underestimate the driving risk.
Hypothesis 2 (H2). Subjective norm positively influences the intention to underestimate the risk.
Hypothesis 3 (H3). Perceived behavioral control positively influences the intention to underestimate the risk.
Hypothesis 4 (H4). The intention to underestimate the risk positively influences a driver’s underestimated risk behavior.
Although the TPB is proven to be highly applicable in practice, it has certain limitations, such as its static explanatory nature [
30] and its focus on rational reasoning. To address these, Conner suggested extending the theoretical model [
31]. Guided by this idea, Li introduced sensation seeking and risk perception to explain and predict the risky driving behavior of truck drivers based on the TPB [
32]. McBride et al. used the TPB combined with psychosocial factors to explore the intention of young drivers to text while driving [
19]. Conner et al. incorporated moral norms, anticipated regret, and past behavior into the TPB to explore factors influencing the speeding behavior [
33]. The introduction of these variables further developed the TPB and enhanced its ability to explain and predict behavioral intentions and behaviors in specific contexts. Personality traits were found to be significantly associated with behavioral intention to drive and driver risk perception [
34,
35,
36,
37]. In addition, personality traits in drivers have been also found to be associated with an increased perception of stress that can affect behaviors while driving [
38]. Hence, this study considered incorporating personality traits into the TPB to enhance its explanatory and predictive power.
Normlessness, originally defined as an individual’s belief that it is acceptable to do anything that they can get away with [
39], now refers to an individual’s disrespect for and noncompliance with social norms. Drivers who scored high in normlessness were found to frequently violate traffic rules and were more likely to underestimate driving risks because such drivers do not care about traffic rules and are more likely to engage in aggressive driving behavior [
40]. Ulleberg et al. studied the prediction of risky driving behavior in terms of the personality, attitude, and risk perception in 1932 young drivers in Norway and found that different personalities had different effects on risk perception [
40]. Those who scored higher in normlessness perceived lower risk of traffic accidents, showed negative attitudes toward traffic safety, and would frequently engage in risky driving behaviors. Nordfjærn and Şimşekoğlu et al. investigated the different effects of personality traits, risk perception, and cultural differences on attitudes and driving behaviors on traffic safety among Turkish and Iranian drivers through a questionnaire [
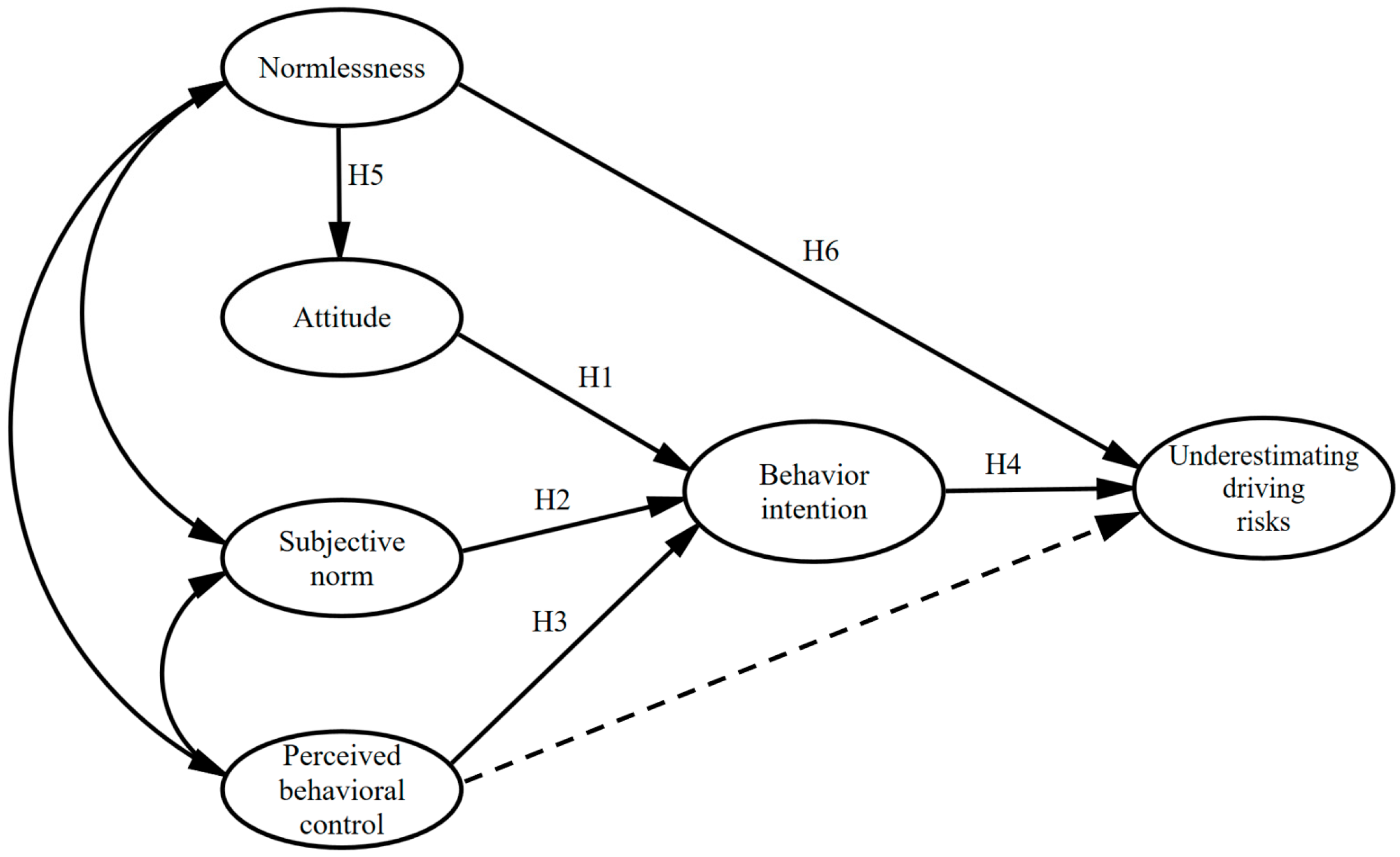
41]. The results showed that personality traits, particularly the normlessness, were the main predictors of attitudes and driving behavior in both samples. Notably, the normlessness was the strongest predictor of traffic attitudes and behaviors, and individuals with high levels of normlessness would violate social norms to achieve their personal goals, and therefore, they were also more likely to violate traffic rules. Normlessness has a direct effect on the behavior of road users and can also play an indirect role in driver behavior through other factors (attitudes). Therefore, based on previous studies, the following hypotheses are made:
Hypothesis 5 (H5). Normlessness positively influences the attitude of underestimating the risk.
Hypothesis 6 (H6). Normlessness positively influences a driver’s behavior of underestimating the risk.
Based on the above analysis, a research model combining the TPB and normlessness was proposed to explain the tendency of drivers in underestimating the driving risks.
Figure 2 shows the research model with the above six hypotheses.
5. Discussion
This study examined the phenomenon of underestimation of the driving risk, which is common among Chinese drivers. The results of the questionnaire revealed that 74.4% of drivers underestimate the driving risk. The ETPB model helped understand the factors influencing risk underestimation and the extent of their influence. The results of the ETPB model showed that psychological factors and personality traits significantly influence risk underestimation, in addition to driving experience, accident experience, and insurance status. Therefore, driver underestimation risk interventions should be developed from multiple perspectives to reduce the risky driving behaviors, thereby decreasing traffic accident rates and improving road safety.
The results of this study further demonstrated the applicability of the TPB in explaining driving behavior. The ATT, SN, and PBC had a significant positive effect on the driver’s intention to underestimate the risk, with standardized path coefficients of 0.32, 0.21, and 0.39, respectively. The results indicated that the PBC had the greatest effect on the intention to underestimate the risk, followed by the ATT, suggesting that drivers who are overconfident in their driving skills and do not pay attention to traffic safety will exhibit more frequent aggressive driving behaviors, easily causing traffic accidents. Moreover, if a driver believes that he/she is a skilled driver who can handle dangerous situations, then he/she will underestimate the risk [
26]. On the contrary, if a driver can objectively evaluate his/her driving ability and has a late negative attitude toward underestimating the risk, then he/she will not exhibit underestimated risk behaviors with greater risk. The relationship between SN and drivers’ intention to underestimate the risk was relatively weak compared with the relationship between ATT and intention to underestimate the risk and PBC and intention to underestimate the risk, which is similar to the findings of Qi et al. [
23] regarding driver’s lane grabbing behavior; these authors found that drivers’ intention to lane grab was less influenced by social norms than by attitudes and perceptual behavioral control, suggesting that drivers do not value their friends’ and family’s opinions on whether to underestimate the risk. Armitage and Commer found that the weakest predictive effect of the SN on behavioral intentions may be due to the poor measurement methods and the fact that the conceptual definition of the SN does not effectively reflect the social influence on individual behavior [
25]. In the TPB, the SN reflects social pressure, which is difficult to obtain directly from whether or not to comply with the wishes of others. In addition, the underestimation of risk intention has a significant effect on drivers’ underestimation of the risk, i.e., the stronger the driver’s intention to underestimate the risk, the more likely the driver to exhibit such behavior. These results suggest that interventions for drivers’ intention to underestimate the risk should be conducted from multiple perspectives, with driver attitude and perceptual behavioral control as the main parameters, and complementary measures from subjective norms.
The introduction of N was mainly to consider personality differences in a driver’s normlessness, and the results showed a significant positive effect of N on driver’s ATT for underestimating the risk as well as URB, a conclusion consistent with the findings of Ulleberg, Nordfjærn and Şimşekoğlu. These studies showed that people who scored higher in normlessness perceived a lower risk of traffic accidents and who had a traffic safety showed negative attitudes and frequently engaged in risky driving behaviors [
40,
41]. Compared to the ATT, SN, PBC, and IN, N had a greater degree of influence on URB, which shows that driver normlessness is a factor that cannot be ignored in the analysis of a driver’s underestimation of risky behaviors. Drivers who scored high in normlessness were found to frequently violate traffic rules and were more likely to underestimate the driving risk because such drivers do not care much about traffic rules and are more likely to engage in aggressive driving behaviors [
40]. N had a positive influence on URB and could also influence a driver’s underestimation of the risk by positively influencing the underestimating risk attitude, playing an indirect role in underestimating the risk behavior. This may be due to the fact that drivers with higher normlessness scores have more negative traffic safety attitudes and more pronounced intentions to violate the rules and are more likely to exhibit risky behaviors.
The results of this study also show no significant effect of gender or age on a driver’s tendency to underestimate the risk. This is in contrast to the findings of Rhodes, Ambros, and Griffin et al., who found that young male drivers typically underestimate potential risks in a traffic environment and are more likely to engage in unsafe driving behaviors [
5,
6,
7]. The reason for this bias may be that their studies considering professional drivers were limited to mainly male populations and that women drive much less than men due to cultural and other factors. However, Cox found no significant correlation between driver age and risk assessment [
13]. In addition, individual driver characteristics, such as the annual mileage, insurance purchase status, and accident experience, had significant effects on a driver’s tendency to underestimate the risk. In particular, drivers with small annual mileage and limited experience tend to underestimate the risk in traffic situations and have a weaker risk perception. This is consistent with the findings of Machin, who found that drivers with limited experience underestimate the risks involved in driving [
55]. As a result, novice drivers with limited experience have higher accident rates and risk-taking tendencies [
56]. Drivers who are well insured do not have to worry about compensation after an accident and are more likely to underestimate the risk. Drivers who have experienced accidents are more alert to dangerous scenarios while driving and are always on the lookout for hazards; in contrast, drivers without such experience are less likely to identify potential risks in traffic scenarios and are more likely to underestimate driving risks. These results suggest that the focus should be on the group of drivers with less driving experience, full insurance coverage, and no accident experience. Effective recommendations should be made for these driver groups to reduce the intention and behavior of underestimating the risks and improve road safety.
The model results show that psychological factors and personality traits have significant effects on underestimated risk behavior. Therefore, driver underestimation risk interventions should be developed from a comprehensive multifaceted perspective to reduce such behaviors and thus decrease traffic accident rates.
Driver risk perception ability is closely related to traffic accidents [
3,
57], and compared to experienced drivers, novice drivers have a poor risk perception ability and are unable to detect potential hazards in a road environment in a timely manner [
3]. Evidently, to fundamentally reduce the occurrence of traffic accidents, it is necessary to find ways to improve a driver’s risk perception. Spolanderl referred to a driver’s ability to perceive traffic risks and prevent accidents in advance as defensive driving skills, which are mainly enhanced by actual road driving experience [
58]. Foreign studies have demonstrated that incorporating defensive driving skills into novice driver training can help reduce traffic accidents by approximately 11.3% [
3,
59]. Currently, driver training in China focuses on theoretical regulations and basic vehicle operation skills, but ignores the learning of risk perception skills. In the future, risk perception tests should be incorporated into driver training programs to improve the risk perception skills of novice drivers.
Perceptual behavioral control has the greatest effect on a driver’s intention to underestimate the risk, suggesting that a driver’s overconfidence in their own driving skills can cause them to underestimate potential risks in a traffic environment and increase their intention to drive dangerously. Conventional driver training, which focuses on improving a driver’s technical driving skills, does not allow drivers to properly assess their own driving skills. Evans found that improvements in technical driving skills may lead to an increase in driver risk-taking behavior [
26]. Therefore, driver training should not only focus on technical driving skills training, but should also help increase training in cognitive deficits so as to provide drivers with technical driving skills training without increasing overconfidence [
23]. Specifically, commentary driving (CD) can be incorporated into the driver training process, where drivers explain possible risks and countermeasures that should be taken to the instructor while driving; this approach would allow drivers to properly assess their driving skills and encourage them to drive with a greater margin of safety [
26,
60].
Normlessness has the greatest impact on a driver’s underestimation of risky behaviors; hence, the focus should be on drivers with high normlessness scores to change their attitudes toward traffic safety. Drivers who underestimate the risks are more likely to engage in aggressive driving behaviors that can lead to traffic accidents; however, underestimating the risks has the benefits of making the drive easier and saving travel time. Therefore, traffic management should identify drivers with high scores of normlessness, improve awareness of law compliance and safety, and develop negative attitudes toward underestimating the risks. Traffic management can measure the degree of a driver’s normlessness using the normlessness and behavior scale developed by Qu et al. [
61]. In addition, drivers with complete insurance coverage and no accident experience are more inclined to underestimate the risk, and traffic management should also focus on this group to prevent them from underestimating risky behavior. Traffic management can use non-punitive strategies (e.g., education or persuasive conversation) to avoid underestimated risky behavior [
23], specifically by promoting educational campaigns on the hazards of underestimated risky driving behaviors, implementing lifelong driver education, and increasing traffic safety advertisements to reduce a driver’s intention to underestimate the risk behavior [
62].
This study determined the factors influencing a driver’s underestimated risk behavior and clarified the degree of influence of each factor on this behavior based on the ETPB. However, the following limitations remain. First, this study mainly used the questionnaire survey method, which is susceptible to social desirability effects and recall bias and cannot confirm the authenticity of the respondents when they filled out the questionnaire [
22].Subsequently, the questionnaire can be combined with field survey or combined with driving simulation experiments, and can also collect information about drivers’ driving profiles with the use of a vehicle telematics system to analyze the relationship between driver underestimation risk behavior and psychological factors more precisely. Second, the questionnaire was designed considering the acceptability of the respondents’ time in filling out the questionnaire, and 3–4 questions were used to measure each construct. Additional questions could be added to improve the accuracy of the survey. Third, Bergomi et al. pointed out that personality traits were associated with determining stress perception; “neurotic” and “impulsive” traits were especially associated with higher stress perception, which can affect the behaviors while driving [
38]. Future research could consider using stress perception as a mediating variable to study the effect of personality traits on driver risk perception. Finally, risk perception can vary according to different cultural backgrounds, highly influenced by ethnicity [
45,
63]. The focus of this study was to explore the underestimated risk perception characteristics of Chinese drivers and it did not consider the effects of different ethnic and cultural backgrounds on drivers’ risk perception. Future research could consider the effects of different ethnic and cultural backgrounds on driver risk perceptions, and risk perception should be improved with an adequate consideration of ethnicity and cultural background when designing specific preventive interventions to increase driver occupational health and safety. In addition, this study only used data from the non-professional drivers, which may not be applicable to the risk perception characteristics of professional drivers, therefore, conducting the posted questionnaire among professional drivers may be considered as a new issue for future studies.




{kind=link}
{kind=link}
{kind=link}