3.1. Problem Inputs
We consider the problem of routing multiple quarantine vehicles to transfer high-risk individuals (potential propagators) to an isolated region in epidemic situations. Let
be the set of
n locations or small areas with high-risk individuals, and
be the number of high-risk individuals in
(
). We have a set
of vehicles, and the capacity of
(i.e., the maximum number of individuals that can be carried by
) is
(
). Based on the distances between the areas and the velocities of the vehicles, we can obtain the travel time
of each vehicle
from its original location to each area
, the time
for
to travel from
to
, and the time
for
to travel from
to the isolated region (
). We also have the average time interval
between loading two individuals in
by
, which depends on the dispersion of individuals in the area (for example, if individuals are gathered in a community health center, the interval can be several seconds; if individuals are in different units of a housing estate, the interval can be several minutes). The inputs indicate that we can use vehicles with different capacities and velocities, and thus the problem is a heterogeneous VRP.
Table 1 lists the variables used in the problem formulation.
3.2. Decision Variables and Scheduling Rules
The problem needs to first determine the sequence of areas to be visited by each vehicle , where is the index of ’s jth visiting area in A, and is the number of areas assigned to . Moreover, as aforementioned, after visiting an area, a vehicle may either go back to the isolated region or go to the next area, so we also need to determine the sequence of intermediate decisions of , where indicates that will go back to the isolated region after visiting the jth area of its sequence and otherwise. Consequently, a solution to the problem consists of both the set and set .
Nevertheless, the decision variables are not completely free. Based on experiences from the emergency management departments and related studies, we have a set of specific rules for cases where high-risk individuals in an area cannot be transferred by a vehicle in one round. Let , i.e., the minimum capacity among all vehicles. The first rule is as follows:
- R1.
If , then the area can only be assigned to one vehicle.
Note that the vehicle may still go to more than once, in the case when the vehicle goes to for the first time, it has already carried some individuals from other areas and its remaining capacity is less than . In such a case, we have the second rule:
- R2.
If the area is only assigned to the vehicle , then cannot go to the next area until all individuals in have been loaded.
In other words, if cannot transfer all individuals in in one round and there is no other vehicle assigned for , then should go back and forth between and the isolated region until there is no individual left in .
The third rule limits the number of vehicles that can be utilized to transfer high-risk individuals in an area:
- R3.
Let be a positive integer satisfying , then the area can be assigned to at most vehicles.
When there are two or more vehicles scheduled to transfer high-risk individuals in an area, we have the fourth rule:
- R4.
If an area is assigned to two or more vehicles, then the vehicle first arrives at should load individuals in as much as possible in the first round.
That is if the available capacity of the vehicle first arrives at is not smaller than , it should load all individuals; otherwise, should use up its capacity in the first round.
Finally, the fifth rule generalizes the application scope of the above four rules:
- R5.
Whenever a vehicle has been scheduled, the rules R1–R4 still apply to the remaining subproblem.
In general, we first determine the schedule of the vehicle with the minimum capacity without violating R1–R4, and then recalculate of the remaining vehicles; this process recursively continues until all vehicles have been scheduled. For the convenience of applying these rules, without loss of generality, we assume that all vehicles in V have been sorted in nondecreasing order of .
3.3. Solution Evaluation
As our objective is to reduce the transmission risk associated with the individuals during their exposure, we need to calculate the exposure duration of each high-risk individual, i.e., the time period before he/she is loaded into a quarantine vehicle. We first consider a simplified version where
each area is only assigned to one vehicle. For each vehicle
, its arrival time at its first area
is:
The capacity of
when it arrives at
is:
If
, then
can load all
individuals at a time and then leave the area; otherwise, according to the rule R2,
should go back and forth between the area and isolated region for
times, where
Here, takes the largest integer smaller than or equal to x, and takes the largest integer larger than or equal to x.
Consequently, the time at which
finally leaves
is
The arrival time and capacity at the next area can always be calculated based on the leaving time and capacity of the previous area:
The number of times that
goes back and forth between the next area and isolated region depends on the intermediate decision and remaining capacity at the previous area:
By analogy, the time at which
finally leaves
is
The total transmission risk is evaluated as the sum of exposure durations of all high-risk individuals. For each area
, the exposure duration of the first individual is
, each next individual in the first round needs to wait another period of
, and the exposure duration of each individual in subsequent rounds should take the travel time of
between the area and the isolated region into consideration. Consequently, the sum of exposure durations of individuals in the area can be calculated by Equation (
9).
The main difficulty lies in the case when an area is assigned to two or more vehicles. Let be the set of such areas and be the set of vehicles to which the area a is assigned. We use the following procedure to deal with this difficulty.
Initialize for all i and j, and initialize a set , i.e, consists of the areas to be first visited by the vehicles.
Select from the area with the earliest arrival time.
If
, i.e., all
individuals can be loaded in one round, then use Equations (
5)–(
9) to calculate the sum of exposure durations of individuals in
and the arrival time and capacity of the corresponding vehicle at the next area.
Otherwise, let
be the first vehicle arriving at
,
be the number of individuals in
,
be the index of
in the sequence of
, and
, i.e., the number of individuals that can be loaded by
in the current round. We first increase
by the exposure durations of individuals loaded by
in this round:
and then update the number of remaining individuals in
as
- (4.1)
If
, temporally update the arrival time of
after the current round of transfer:
and then go to step 2).
- (4.2)
Otherwise
, use Equations (
5) and (
6) to calculate the arrival time and capacity of
at the next area.
- (4.3)
For each other
, restore its arrival time at
to the value of the previous round (if exists, because after returning to the isolated region,
can directly go to the next area instead of revisiting
), and use Equations (
5) and (
6) to calculate its arrival time and capacity at the next area.
Remove from both and ; if is not the last area in the sequence, add the next area to .
Go to step 2) until is empty.
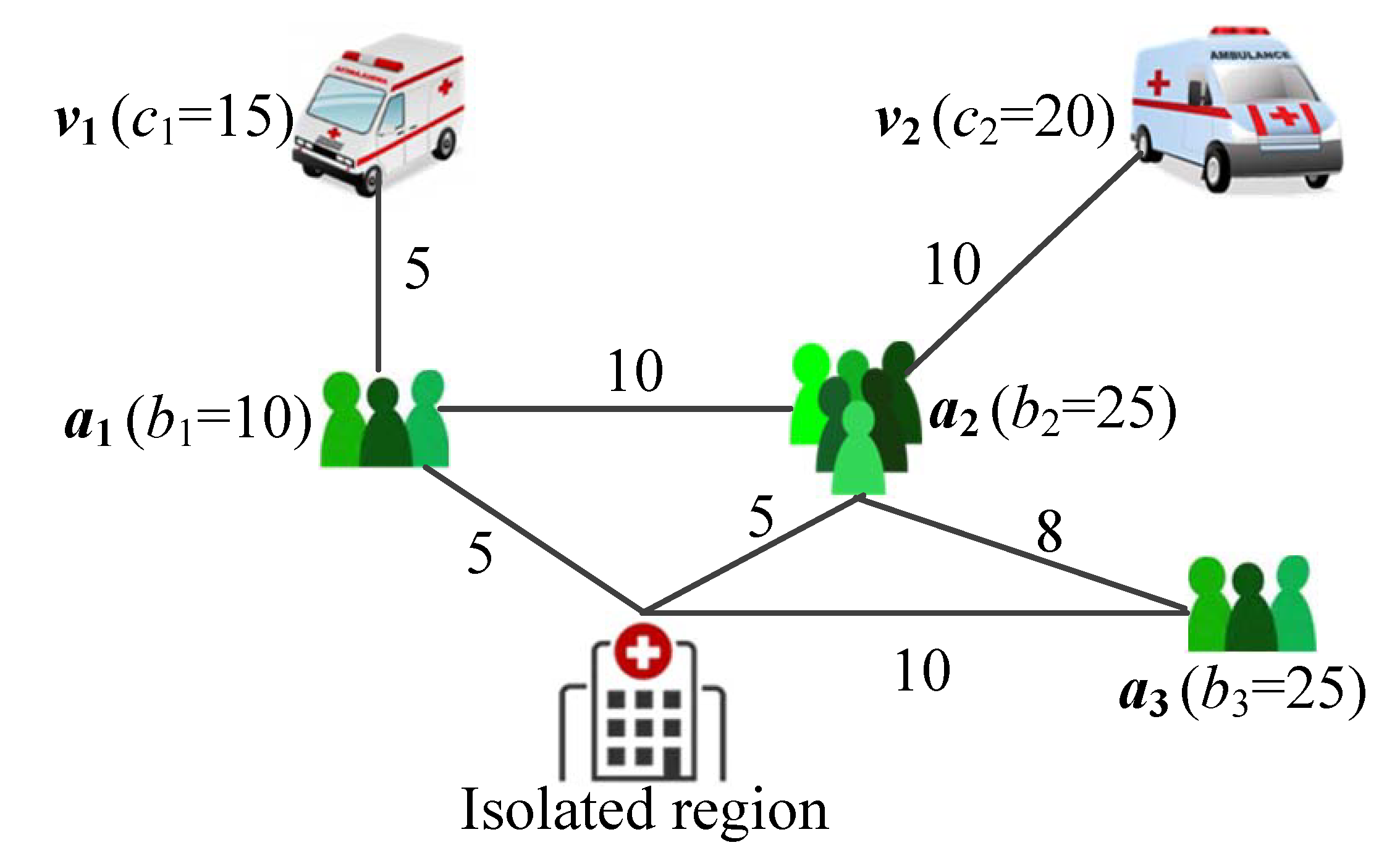
For illustration, consider a simple example shown in
Figure 2. Suppose that
,
,
,
. According to the above procedure,
is initialized as
, for which we have
and
. In the first iteration, we select
and
, and then calculate
In the second iteration, we have
,
and
, and then calculate
In the third iteration, we select
and
, and then calculate
As now , we restore and recalculate and . Similarly, in the remaining iterations, individuals in are first transferred by followed by .
The objective of the problem is to minimize the sum of exposure durations of all individuals, and hence the problem are formulated as
Due to the inclusion of Y into the decision, the considered problem is significantly more complex than the basic VRP.













{kind=link}
{kind=link}
{kind=link}
{kind=link}