Personal Exposure Estimates via Portable and Wireless Sensing and Reporting of Particulate Pollution



Abstract
1. Introduction
1.1. Summary of Problem
1.2. Current Work in the Field
1.3. Contribution of the Current Work
2. Methodology
3. Results and Discussion
3.1. Optimizing Delay Time
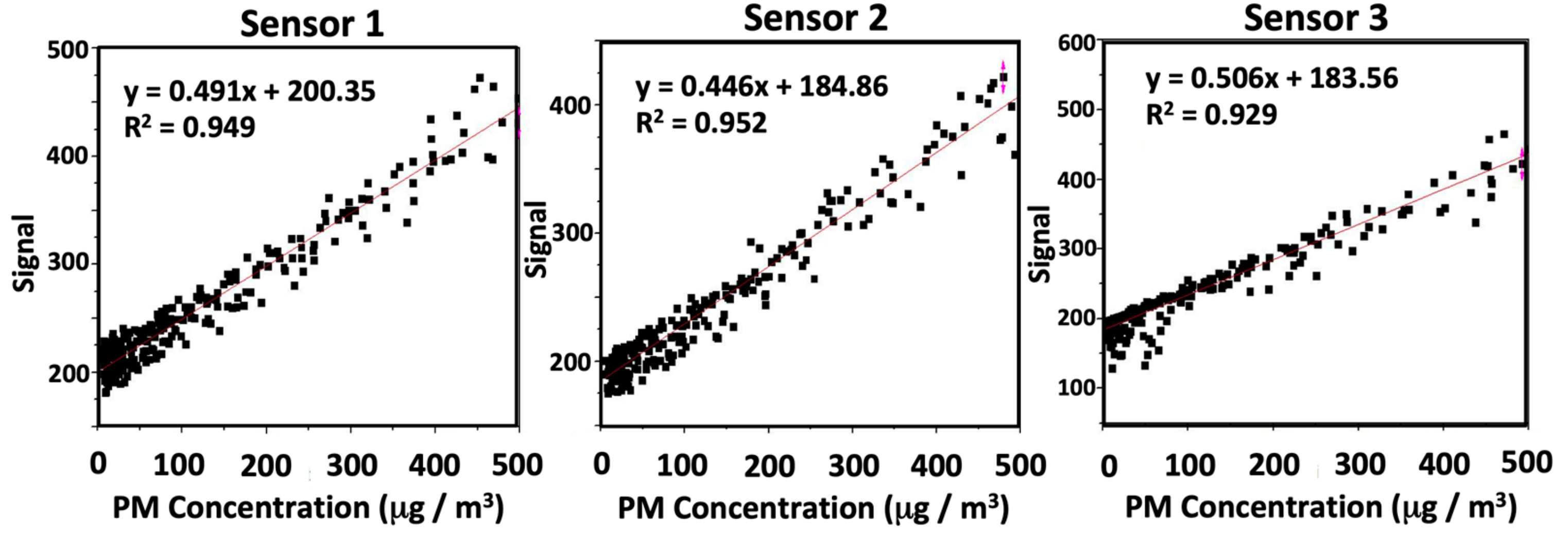
3.2. Sensor Calibration Results
3.3. Effect of Signal Averaging
3.4. Precision of Dust Sensors
3.5. Monitoring Experiments
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Nathanson, J. Air Pollution. Encyclopedia Britannica [Online]. Posted 31 October 2018. Available online: https://www.britannica.com/science/air-pollution (accessed on 18 July 2019).
- Brook, R.D.; Rajagopalan, S.; Pope, C.A. Particulate Matter Air Pollution and Cardiovascular Disease: An Update to the Scientific Statement from the American Heart Association. Circulation 2010, 121, 2331–2378. [Google Scholar] [CrossRef]
- Thompson, J.E. Airborne Particulate Matter: Human Exposure & Health Effects. J. Occup. Environ. Med. 2018, 60, 392–423. [Google Scholar]
- Pope, C.A.; Tuner, M.C.; Burnett, R.; Jerrett, M.; Gapstur, S.M.; Diver, W.R.; Krewski, D.; Brook, R.D. Relationships Between Fine Particulate Air Pollution, Cardiometabolic Disorders and Cardiovascular Mortality. Circ. Res. 2015, 116, 108–115. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Burnett, R.T.; Kwong, J.C.; Villeneuve, P.J.; Goldberg, M.S.; Brook, R.D.; van Dokelaar, A.; Jerrett, M.; Martin, R.V.; Kopp, A.; et al. Spatial association between ambient fine particulate matter and incident hypertension. Circulation 2014, 129, 562–569. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization. Ambient Air Pollution: Health Impacts. Available online: https://www.who.int/airpollution/ambient/health-impacts/en/ (accessed on 18 July 2019).
- Miller, K.A.; Siscovick, D.S.; Sheppard, L. Air Pollution and Cardiovascular Disease Events in the Women’s Health Initiative Observational (WHI-OS) Study. Circulation 2004, 109, 71. [Google Scholar] [CrossRef]
- Goss, C.H.; Newsom, S.A.; Schildcrout, J.S. Effect of Ambient Air Pollution on Pulmonary Exacerbations and Lung Function in Cystic Fibrosis. Am. J. Repir. Crit. Care Med. 2004, 169, 816–821. [Google Scholar] [CrossRef] [PubMed]
- Woodruff, T.J.; Parker, J.D.; Schoendorf, K.C. Fine Particulate Matter (PM2.5) Air Pollution and Selected Causes of Postneonatal Infant Mortality in California. Environ. Health Perspect. 2006, 114, 786–790. [Google Scholar] [CrossRef] [PubMed]
- Hoek, G.; Brunekreef, B.; Goldbohm, S.; Fischer, P.; van den Brandt, P.A. Association between mortality and indicators of traffic-related air pollution in The Netherlands: A cohort study. Lancet 2002, 360, 1203–1209. [Google Scholar] [CrossRef]
- National Oceanic & Atmospheric Administration. Aerosols: Climate and Air Quality. Available online: https://www.esrl.noaa.gov/research/themes/aerosols/ (accessed on 18 July 2019).
- Zhang, Q.; Thompson, J.E. A Model for Absorption of Solar Radiation by Mineral Dust within Liquid Cloud Drops. J. Atmos. Solar-Terrestr. Phys. 2015, 133, 121–128. [Google Scholar] [CrossRef]
- Bozlaker, A.; Prospero, J.M.; Fraser, M.P.; Chellam, S. Quantifying the Contribution of Long-Range Saharan Dust Transport on Particulate Matter Concentrations in Houston, Texas, Using Detailed Elemental Analysis. Environ. Sci. Technol. 2013, 47, 10179–10187. [Google Scholar] [CrossRef]
- Thompson, J.E. Photochemical and Climate Implications of Airborne Dust. In Dust: Sources, Environmental Concerns and Control; Nova Publishers: New York, NY, USA, 2011; ISBN 978-1-61942-566-8. [Google Scholar]
- Redmond, H.; Dial, K.; Thompson, J.E. Light Scattering & Absorption by Wind Blown Dust: Theory, Measurement and Recent Data. Aeolian Res. 2010, 2, 5–26. [Google Scholar]
- Koo, B.; Knipping, E.; Yarwood, G. 1.5-Dimensional volatility basis set approach for modeling organic aerosol in CAMx and CMAQ. Atmos. Environ. 2014, 95, 158–164. [Google Scholar] [CrossRef]
- Jiang, J.; Aksoyoglu, S.; El-Haddad, I.; Ciarelli, G.; Denier van der Gon, H.A.C.; Canonaco, F.; Gilardoni, S.; Paglione, M.; Minguillón, M.C.; Favez, O.; et al. Sources of organic aerosols in Europe: A modelling study using CAMx with modified volatility basis set scheme. Atmos. Chem. Phys. Discuss. 2019, 19, 15247–15270. [Google Scholar] [CrossRef]
- Wei, Y.; Cao, T.; Thompson, J.E. The Chemical Evolution & Physical Properties of Atmospheric Organic Aerosol: A Molecular Structure Based Approach. Atmos. Environ. 2012, 62, 199–207. [Google Scholar]
- Gallardo, L.; Barraza, F.; Ceballos, A.; Galleguillos, M.; Huneeus, N.; Lambert, F.; Ibarra, C.; Munizaga, M.; O’Ryan, R.; Osses, M.; et al. Evolution of air quality in Santiago: The role of mobility and lessons from the science-policy interface. Elem. Sci. Anth. 2018, 6, 38. [Google Scholar] [CrossRef]
- Power, A.L.; Tennant, R.K.; Jones, R.T.; Tang, Y.; Du, J.; Worsley, A.T.; Love, J. Monitoring Impacts of Urbanisation and Industrialisation on Air Quality in the Anthropocene Using Urban Pond Sediments. Front. Earth Sci. 2018, 6, 131. [Google Scholar] [CrossRef]
- Eggleston, M.P.; Hackman, C.A.; Heyes, J.G.; Irwin, R.J.; Timmis, M.L. Trends in urban air pollution in the United Kingdom during recent decades. Atmos. Environ. Part B Urban Atmos. 1992, 26, 227–239. [Google Scholar] [CrossRef]
- Thompson, J.E.; Hayes, P.L.; Jimenez, J.L.; Adachi, K.; Zhang, X.; Liu, J.; Weber, R.J.; Buseck, P.R. Aerosol Optical Properties at Pasadena, CA During CALNEX 2010. Atmos. Environ. 2012, 55, 190–200. [Google Scholar] [CrossRef]
- Fathy El-Sharkawy, M.; Dahlawi, S.M. Study the effectiveness of different actions and policies in improving urban air quality: Dammam City as a case study. J. Taibah Univ. Sci. 2019, 13, 514–521. [Google Scholar] [CrossRef]
- Air Pollution Levels Rising in Many of the World’s Poorest Cities. Available online: https://www.who.int/news-room/detail/12-05-2016-air-pollution-levels-rising-in-many-of-the-world-s-poorest-cities (accessed on 24 November 2019).
- Sanford, L.; Burney, J. Cookstoves illustrate the need for a comprehensive carbon market. Environ. Res. Lett. 2015, 10, 084026. [Google Scholar] [CrossRef]
- Wathore, R.; Mortimer, K.; Grieshop, A.P. In-Use Emissions and Estimated Impacts of Traditional, Natural-and Forced-Draft Cookstoves in Rural Malawi. Environ. Sci. Technol. 2017, 51, 1929–1938. [Google Scholar] [CrossRef] [PubMed]
- Lonati, G.; Giugliano, M.; Butelli, P.; Romele Ruggero Tardivo, L. Major chemical components of PM2.5 in Milan (Italy). Atmos. Environ. 2005, 39, 1925–1934. [Google Scholar] [CrossRef]
- Wei, Y.; Ma, L.; Cao, T.; Zhang, Q.; Wu, J.; Buseck, P.R.; Thompson, J.E. Light Scattering and Extinction Measurements Combined with Laser-Induced Incandescence for the Real-Time Determination of Soot Mass Absorption Cross Section. Anal. Chem. 2013, 85, 9181–9188. [Google Scholar] [CrossRef] [PubMed]
- Hueglina, C.; Gehriga, R.; Baltensperger, U.; Gysel, M.; Monn, C.; Vonmont, H. Chemical characterisation of PM2.5, PM10 and coarse particles at urban, near-city and rural sites in Switzerland. Atmos. Environ. 2005, 39, 637–651. [Google Scholar] [CrossRef]
- Thompson, J.E.; Myers, K. Cavity Ring-Down Lossmeter using a Pulsed Light Emitting Diode Source and Photon Counting. Meas. Sci. Technol. 2007, 18, 147–154. [Google Scholar] [CrossRef]
- Kumar, A.; Gupta, T. Development and Field Evaluation of a Multiple Slit Nozzle-Based High Volume PM2.5 Inertial Impactor Assembly (HVIA). Aerosol Air Qual. Res. 2015, 15, 1188–1200. [Google Scholar] [CrossRef]
- Li, J.; Biswas, P. Optical Characterization Studies of a Low-Cost Particle Sensor. Aerosol Air Qual. Res. 2017, 17, 1691–1704. [Google Scholar] [CrossRef]
- Sousan, S.; Koehler, K.; Thomas, G.; Park, J.H.; Hillman, M.; Halterman, A.; Peters, T.M. Inter-comparison of Low-cost Sensors for Measuring the Mass Concentration of Occupational Aerosols. Aerosol Sci. Technol. 2016, 50, 462–473. [Google Scholar] [CrossRef]
- Gunawan, T.S.; Munir, Y.M.; Kartiwi, M.; Mansor, H. Design and Implementation of Portable Outdoor Air Quality Measurement using Arduino. Int. J. Electr. Comput. Eng. 2018, 8, 280–290. [Google Scholar] [CrossRef]
- Reilly, M.K.; Birner, T.M.; Johnson, G.N. Measuring Air Quality using Wireless Self-Powered Devices. Inst. Electr. Electr. Eng. 2015, 267–272. [Google Scholar] [CrossRef]
- Zamora, L.M.; Xiong, F.; Gentner, D.; Kerkez, B. Field and Laboratory Evaluations of the Low-Cost Plantower Particulate Matter Sensor. Environ. Sci. Technol. 2018, 53, 838–849. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Schneider, P.; Haugen, R.; Vogt, M. Performance Assessment of a Low-Cost PM2.5 Sensor for a near Four-Month Period in Oslo, Norway. Atmosphere 2019, 10, 41. [Google Scholar] [CrossRef]
- Liu, D.; Zhang, Q.; Jiang, J.; Chen, D.-R. Performance calibration of low-cost and portable particular matter (PM) sensors. J. Aerosol. Sci. 2017, 112, 1–10. [Google Scholar] [CrossRef]
- Cao, T.; Thompson, J.E. Portable, Ambient PM2.5 Sensor for Human and/or Animal Exposure Studies. Anal. Lett. 2016, 50, 712–723. [Google Scholar] [CrossRef]
- Agrawaal, H.; Thompson, J.E. Wireless Transmission and Logging of Measurement Data through Cellular Networks. NCSLI Meas. 2019. [Google Scholar] [CrossRef]
- Sharp GP2Y1010AU0F Datasheet. Available online: https://www.sparkfun.com/datasheets/Sensors/gp2y1010au_e.pdf (accessed on 24 November 2019).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Range of Concentration (µg/m3) | Statistical Indices (µg/m3) | ||||
|---|---|---|---|---|---|
| Place/Activity | Maximum | Minimum | Mean Conc. | Median Conc. | |
| Driving | 159 | Below L.O.D. | 15 | Below L.O.D. | |
| Living Space | Location 1 | 84 | Below L.O.D. | Below L.O.D. | Below L.O.D. |
| Location 2 | 186 | Below L.O.D. | Below L.O.D. | Below L.O.D. | |
| Location 3 | 113 | Below L.O.D. | 27 | 18 | |
| Parking Lot | Location 1 | 28 | Below L.O.D. | Below L.O.D. | Below L.O.D. |
| Location 2 | 48 | 29 | 34 | 33 | |
| Location 3 | 25 | Below L.O.D. | 18 | 19 | |
| Location 4 | 16 | Below L.O.D. | Below L.O.D. | Below L.O.D. | |
| Church | Location 1 | Below L.O.D. | Below L.O.D. | Below L.O.D. | Below L.O.D. |
| Room Renovation | Location 1 | 85 | 14 | 28 | 25 |
| Workshop | Location 1 | 70 | Below L.O.D. | Below L.O.D. | Below L.O.D. |
| Restaurant | Location 1 | 346 | 20 | 46 | 39 |
| Location 2 | 44 | Below L.O.D. | 24 | 24 | |
| Location 3 | 24 | Below L.O.D. | Below L.O.D. | Below L.O.D. | |
| Location 4 | 81 | Below L.O.D. | 46 | 47 | |
| Grocery Stores | Location 1 | 25 | Below L.O.D. | Below L.O.D. | Below L.O.D. |
| Location 2 | 22 | Below L.O.D. | 17 | 17 | |
| Location 3 | 41 | Below L.O.D. | 26 | 26 | |
| Location 4 | Below L.O.D. | Below L.O.D. | Below L.O.D. | Below L.O.D. | |
| University building | inside | 39 | Below L.O.D. | Below L.O.D. | Below L.O.D. |
| outside | 18 | Below L.O.D. | Below L.O.D. | Below L.O.D. | |
| Coffee shop | Location 1 | 25 | Below L.O.D. | 16 | 16 |
| Location 2 | 17 | Below L.O.D. | Below L.O.D. | Below L.O.D. | |
| Location 3 | Below L.O.D. | Below L.O.D. | Below L.O.D. | Below L.O.D. | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Agrawaal, H.; Jones, C.; Thompson, J.E. Personal Exposure Estimates via Portable and Wireless Sensing and Reporting of Particulate Pollution. Int. J. Environ. Res. Public Health 2020, 17, 843. https://doi.org/10.3390/ijerph17030843
Agrawaal H, Jones C, Thompson JE. Personal Exposure Estimates via Portable and Wireless Sensing and Reporting of Particulate Pollution. International Journal of Environmental Research and Public Health. 2020; 17(3):843. https://doi.org/10.3390/ijerph17030843
Chicago/Turabian StyleAgrawaal, Harsshit, Courtney Jones, and J.E. Thompson. 2020. "Personal Exposure Estimates via Portable and Wireless Sensing and Reporting of Particulate Pollution" International Journal of Environmental Research and Public Health 17, no. 3: 843. https://doi.org/10.3390/ijerph17030843
APA StyleAgrawaal, H., Jones, C., & Thompson, J. E. (2020). Personal Exposure Estimates via Portable and Wireless Sensing and Reporting of Particulate Pollution. International Journal of Environmental Research and Public Health, 17(3), 843. https://doi.org/10.3390/ijerph17030843