Here
h(
t) is the ML height at time
t,
h0 is the ML height at
t0 (
h0 is set to 200 m), when the ML height begin to increase (here,
t0 = 08:00 LT to be consistent with the real observation data);
Hr is the diurnal change range of ML height, it was set to 800 m and it means the ML height ranges between 200 m and 1000 m.
T is the daytime variant periods, it was set to 12 h.
α(
t)
Hp is the perturbation term,
α(
t) is the scale factor, it is a random number between −0.5 and 0.5 and
Hp is height range of the perturbation. The extinct coefficients were to 50 (the value does not impact the analysis) below
h(
t) and 0 above it. Four sets of data with the temporal resolution of 30 s and vertical resolution of 30 m were calculated using Equation (3) and the 15 min averaged ML heights were compared to analyze the performance of different methods. In the Case 0 experiment,
Hp was set to 0 and the ML height showed a sinusodial change in 12 h (
Figure 2a).
In the Case 0 experiment, all four methods could estimate the ideal ML height variation well and agreed with one another, as shown in
Figure 3a. In the Case 1, Case 2 and Case 3 experiments, random perturbations were added to the signal at every time step. In the Case1 experiment, the
Hp was set to 0.5
h(
t),
h(
t) is the ML height in the Case 0 experiment at the respective time;
Hp was set to a fixed valued of 250 m in the dieal2 experiment. In the Case 3 experiment
Hp was set as the
h(
t) in the ideal 0 experiment. The mean bias (the experiments minus the Case 0 experiment), correlation coefficient and root square mean error (RMSE) of estimated ML heights between the Case 1, Case 2, Case 3 experiment and the Case 0 experiment were used to evaluate the method performance, as shown in
Table 2. The results show that in the Case 1 and Case 2 experiments, all four methods showed good correlation between the estimated results with the results of the Case 0 experiment, and the correlation coefficients were close to 1 (greater than 0.95 except the 0.94 of the STD method in the Case 2 experiment). All of the methods tended to underestimate the daytime averaged ML height in all experiments except the GRAD and STD methods, which overestimated them in the Case 2 experiment. The GRAD, WH and W2D methods showed similar performance with the bias, and RMSEs were close to or smaller than the vertical signal resolution (30 m) in the Case 1 and Case 2 experiments, while the STD method showed relative higher error level with the bias of 62.6 m and the RMSE of 68.5 m in the Case 3 experiment. In the Case 3 experiment, when the perturbation term appeared in a wider range, the W2D results had a high correlation with the Case 0 results, with an R value of 0.98, while the correlation coefficients of other three methods decreased dramatically. The GRAD method and STD method outputted small bias in the averaged ML height, but the GRAD method showed a lower correlation coefficient of 0.97 and the STD method underestimated the ML height in the middle period (from 12:00 to 16:00,
Figure 3d). Two more series of experiments were designed with different function forms of
Hp. In the first one, the
Hp was set as a function of
h(
t),
Hp =
bh(
t); and in the second one,
Hp was set as a fixed value. The method evaluation results are shown in
Table 3. It is not surprising that the performances of all methods decreased when the absolute value of
Hp increased. All methods tended to underestimate ML height, as shown in the tests of the Case 1–Case 3 experiments, except the STD method, which always output a positive bias. The GRAD and W2D method output lower biases and RMSEs than the WH and STD methods and the W2D method results have the highest correlation coefficient (0.98 when
b = 0.8 and 0.99 in all other experiments). The bias and RMSE increase with hp in both the GRAD and W2D methods, because the profiles become more deviated from the well mixed condition. When the absolute value of
Hp is low, the absolute value of bias and RMSE output by the W2D method were greater than these of the GRAD method, but the increasing ratio of bias and RMSE of the W2D method was much smaller than those of the GRAD method, which indicated that the W2D method is more robust. As shown in
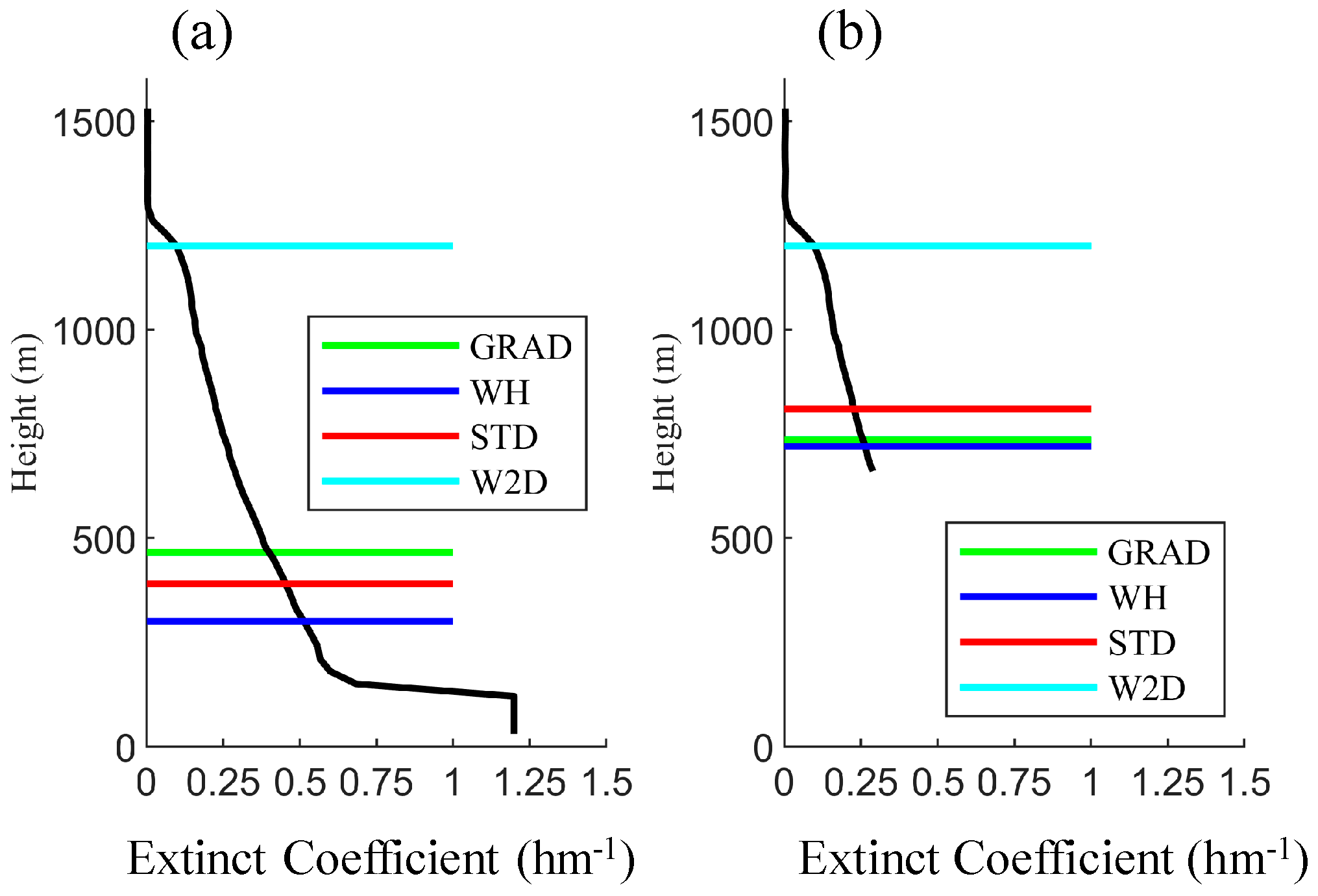
Figure 2 and the following
Section 3.3, well-mixed signal profiles are not always the case in the real observations.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}