
Depth Inversion from Wave Frequencies in Temporally Augmented Satellite Video

 , , ,
, , ,
Abstract
:1. Introduction
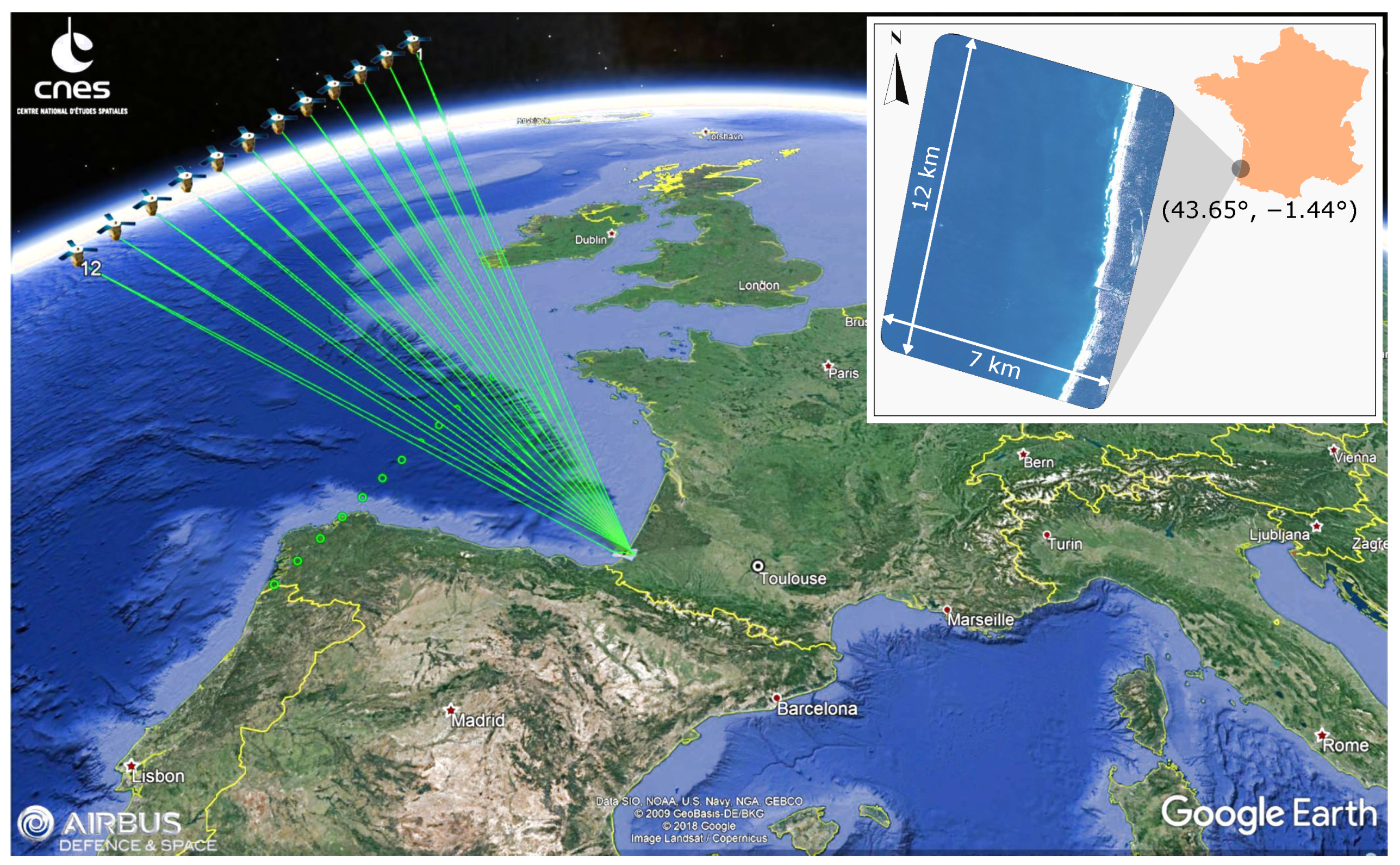
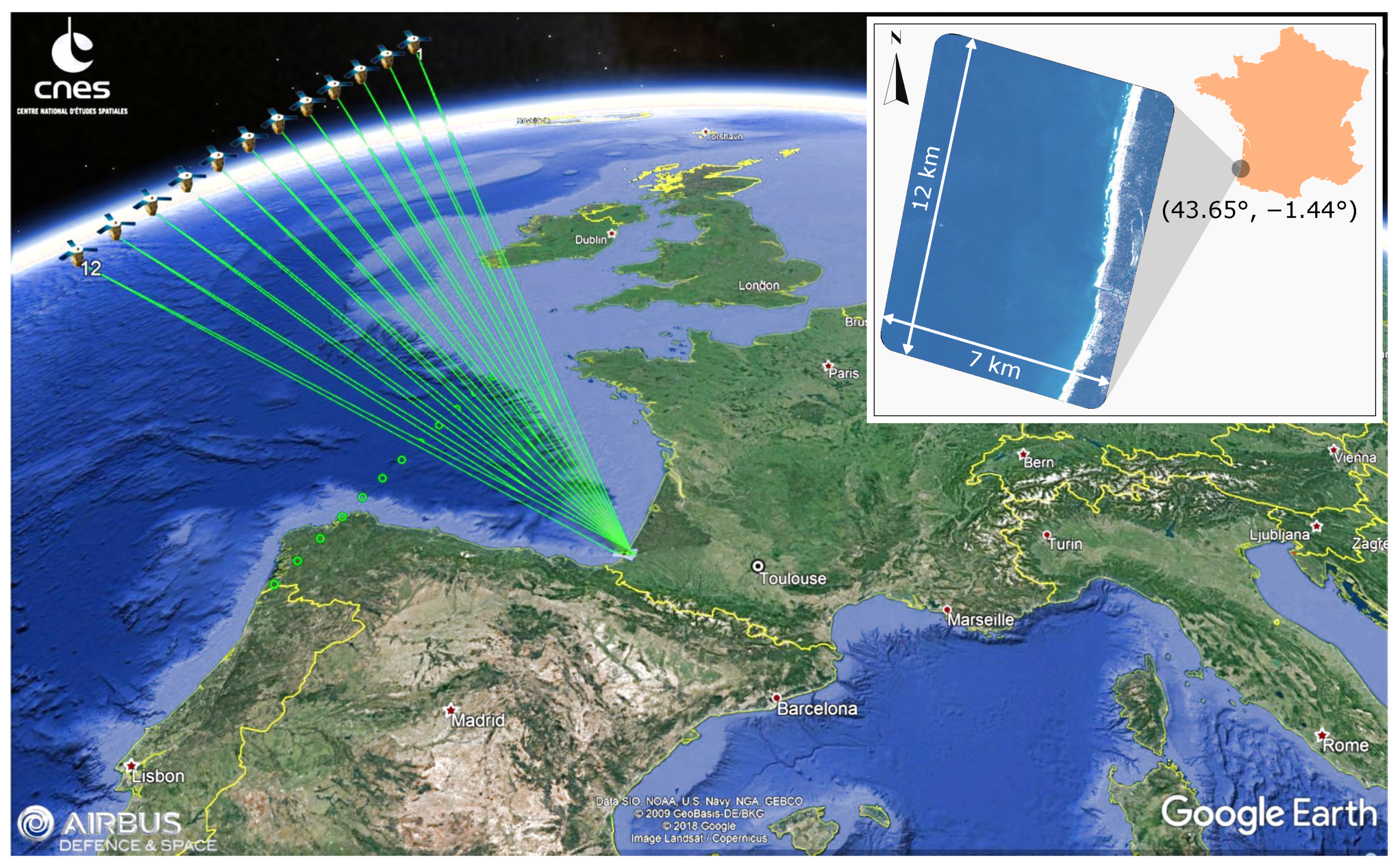
2. Field Site and Data
3. Method
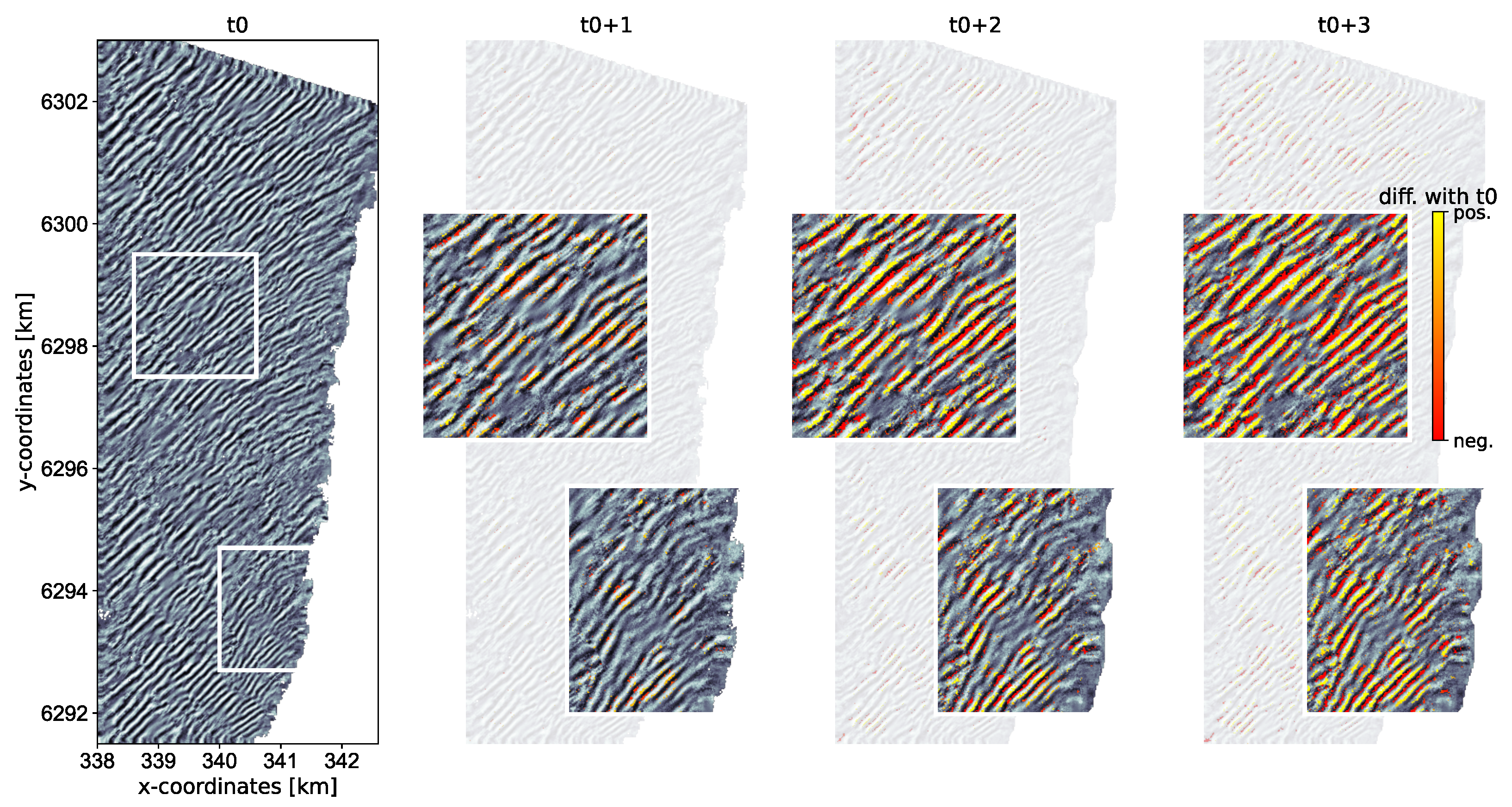
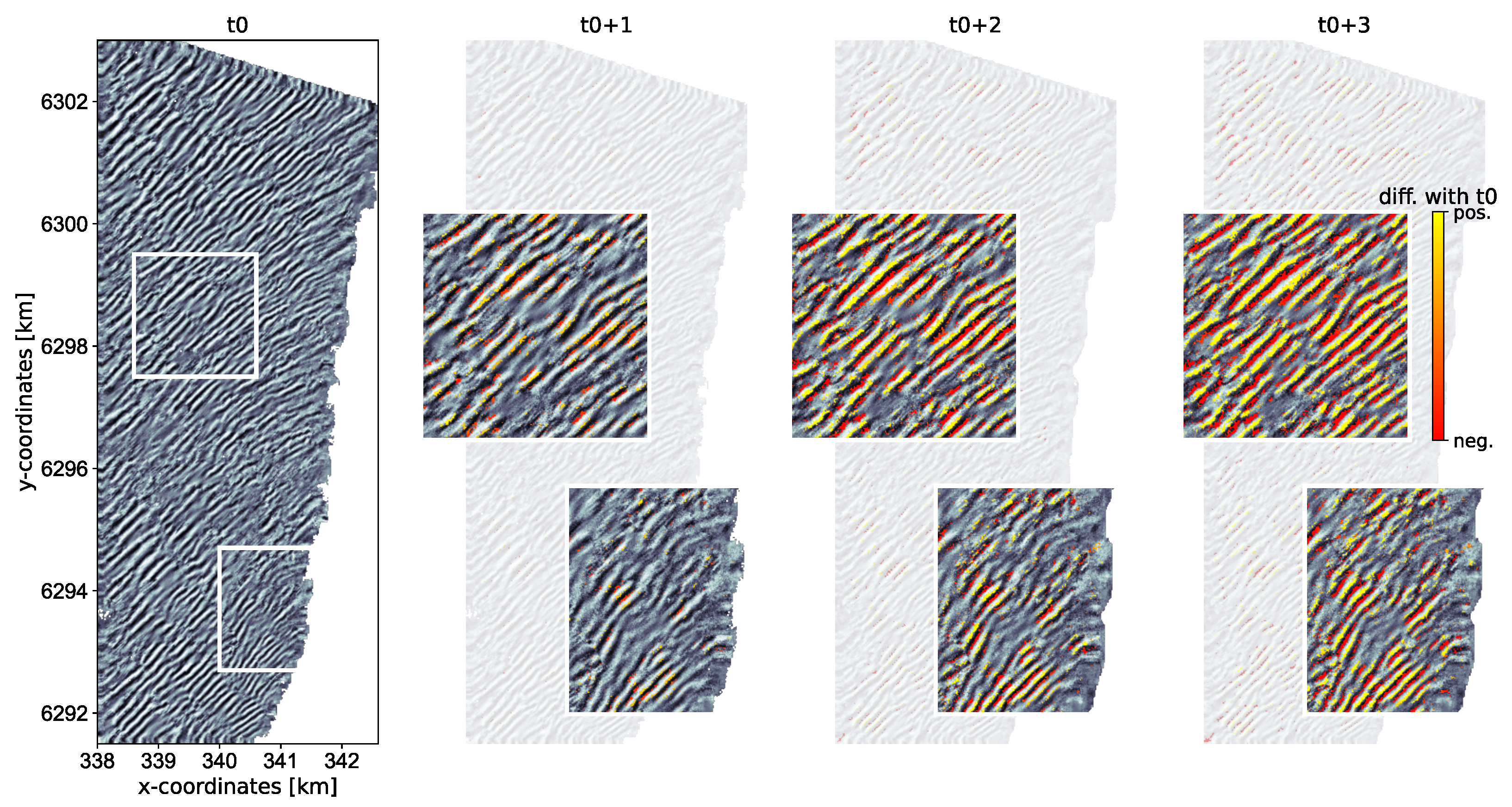
3.1. Temporal Image Augmentation
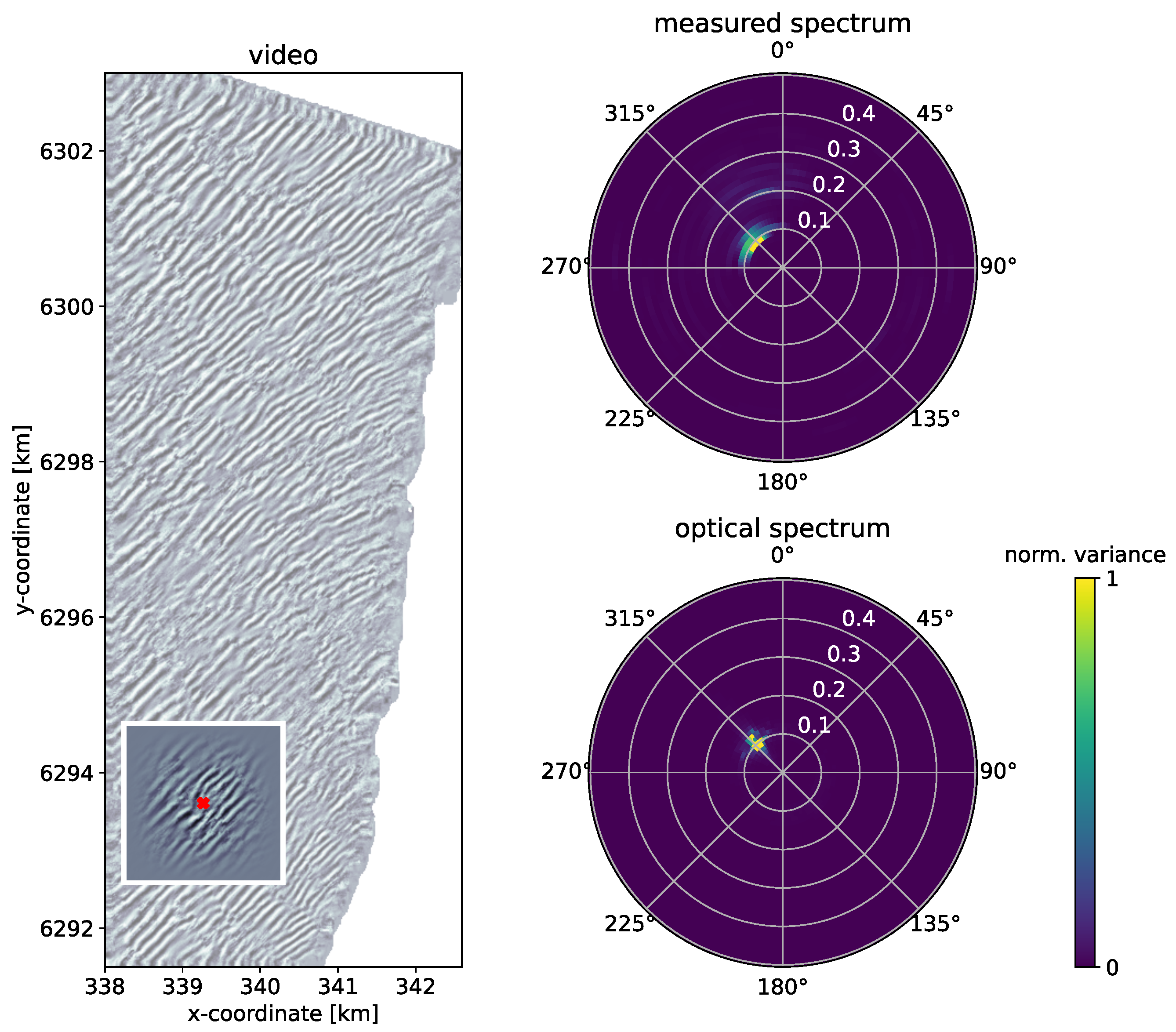
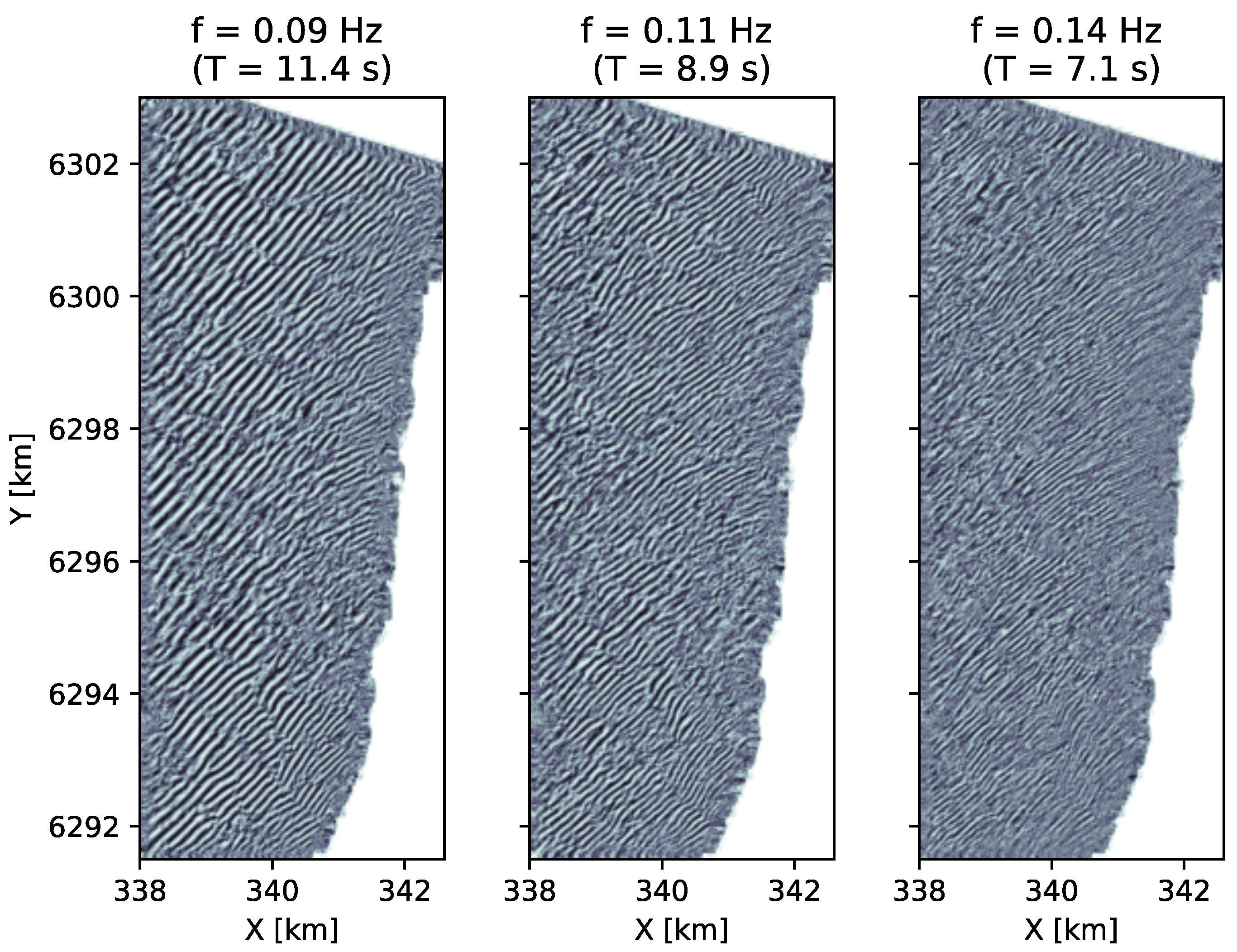
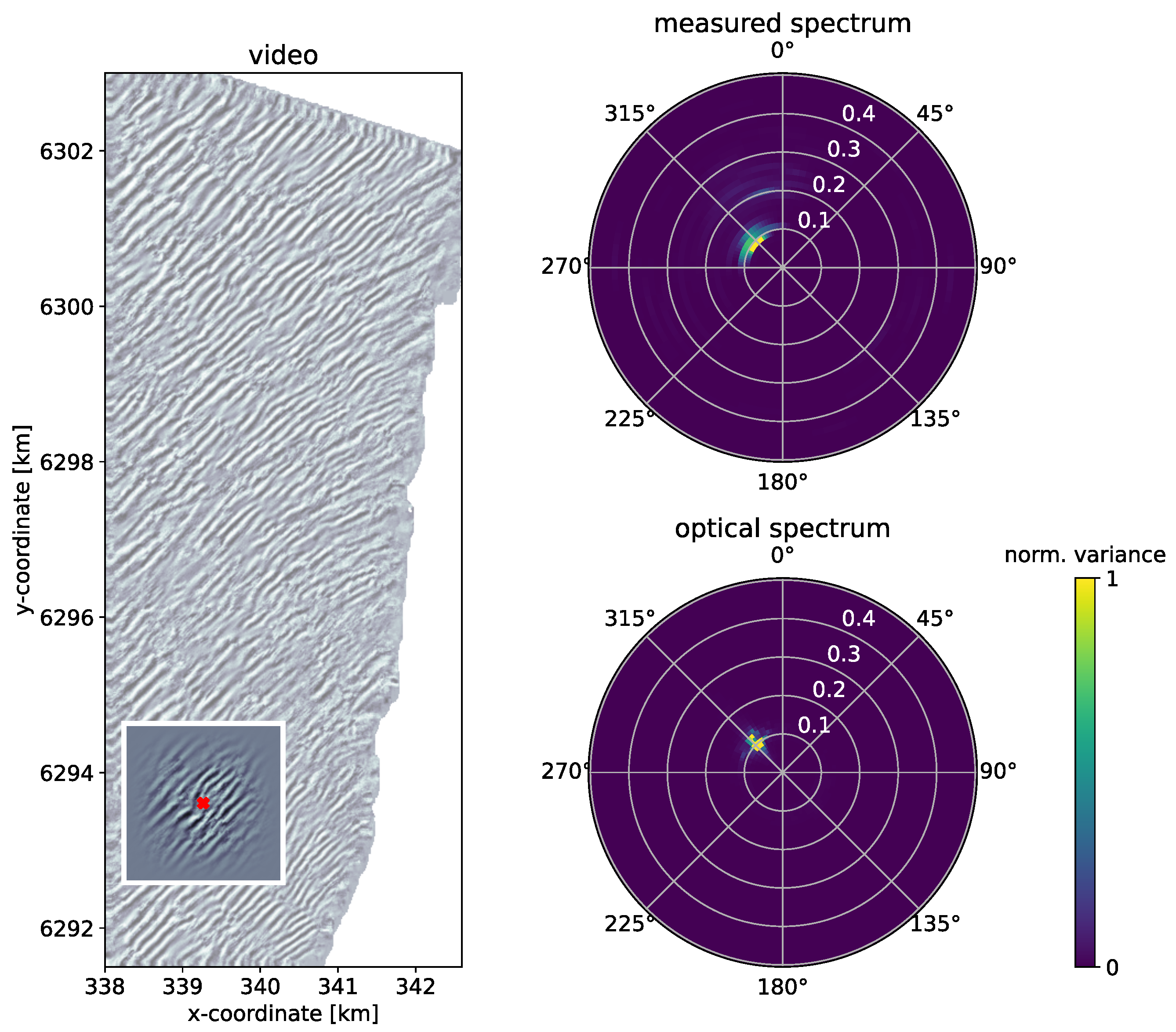
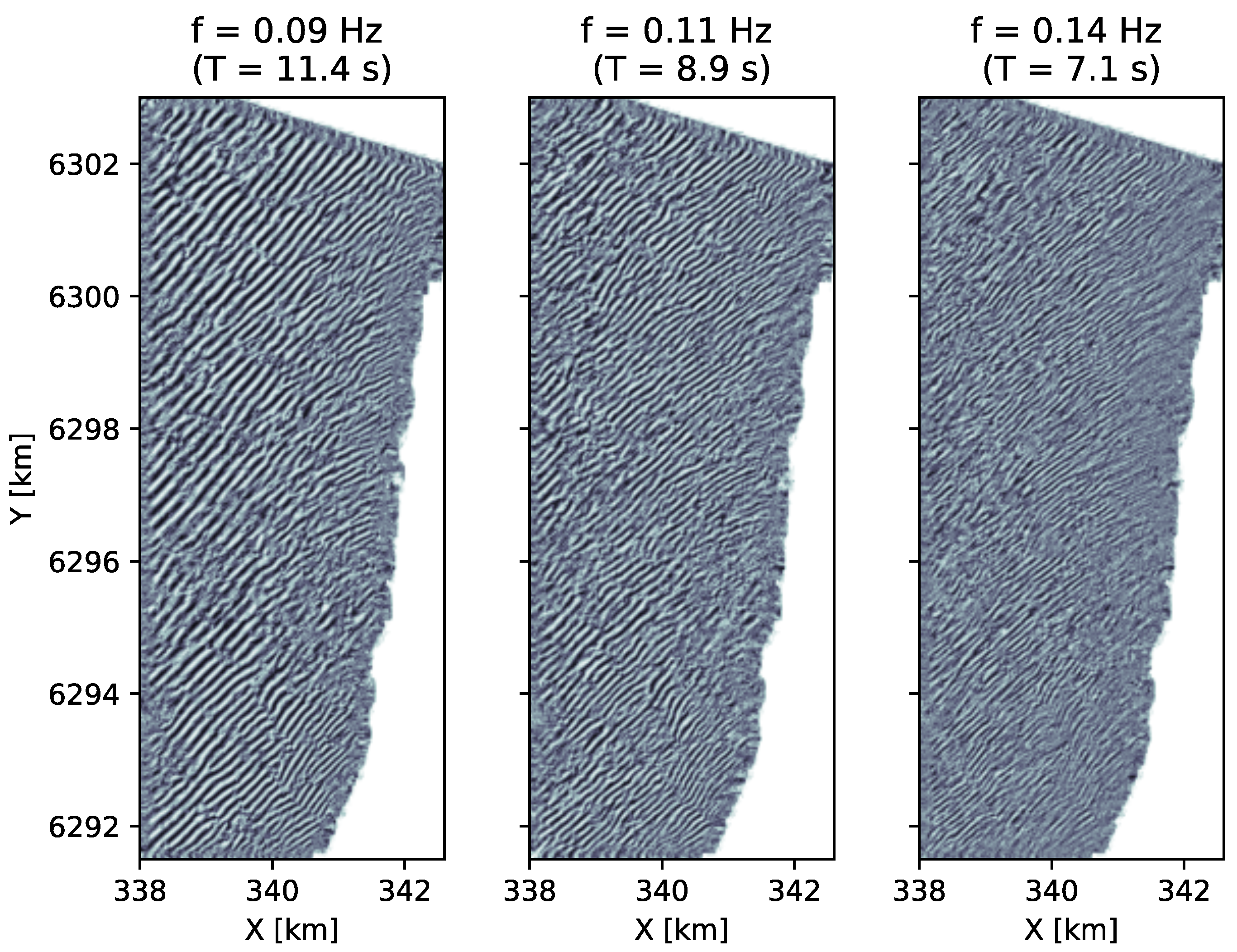
3.2. Frequency-Based Depth Estimation
4. Results
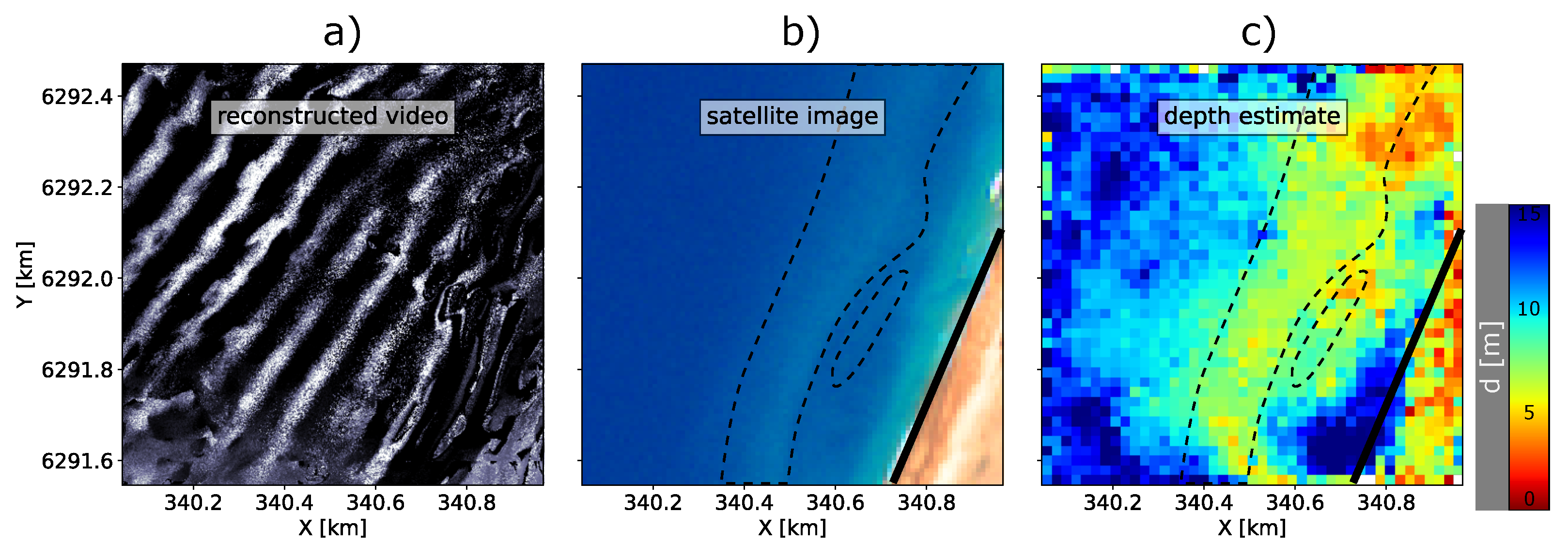
4.1. Results from the Augmentation
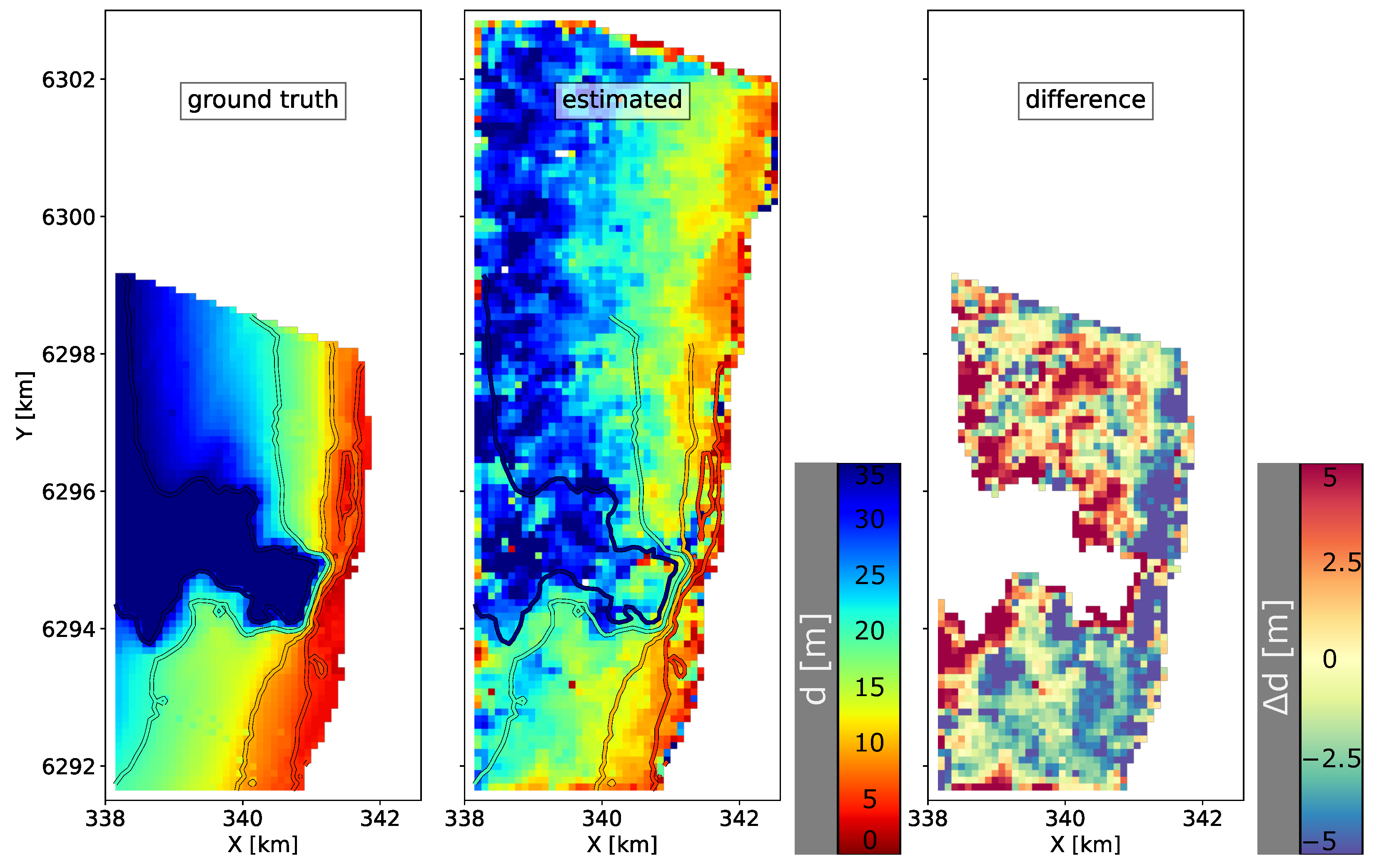
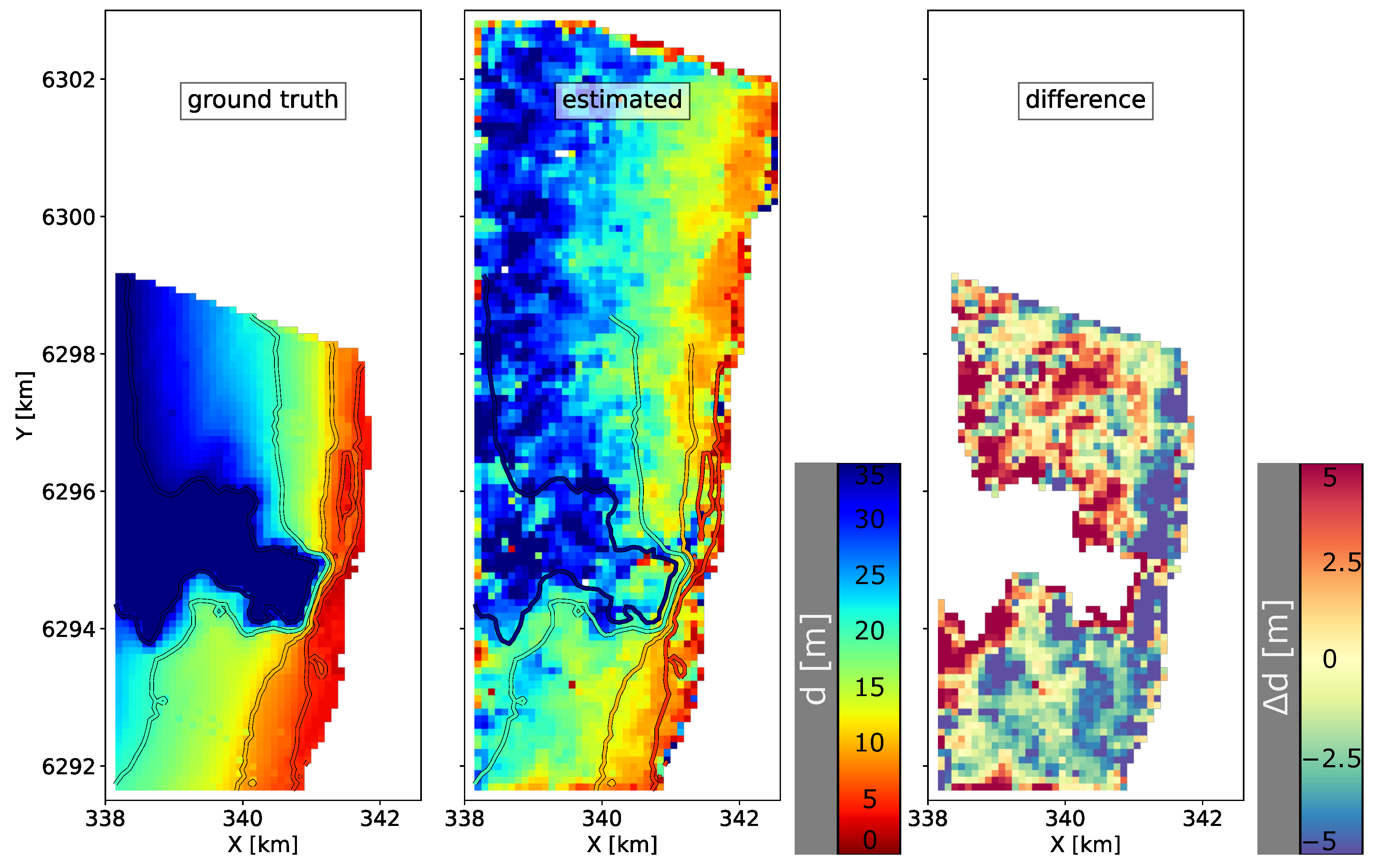
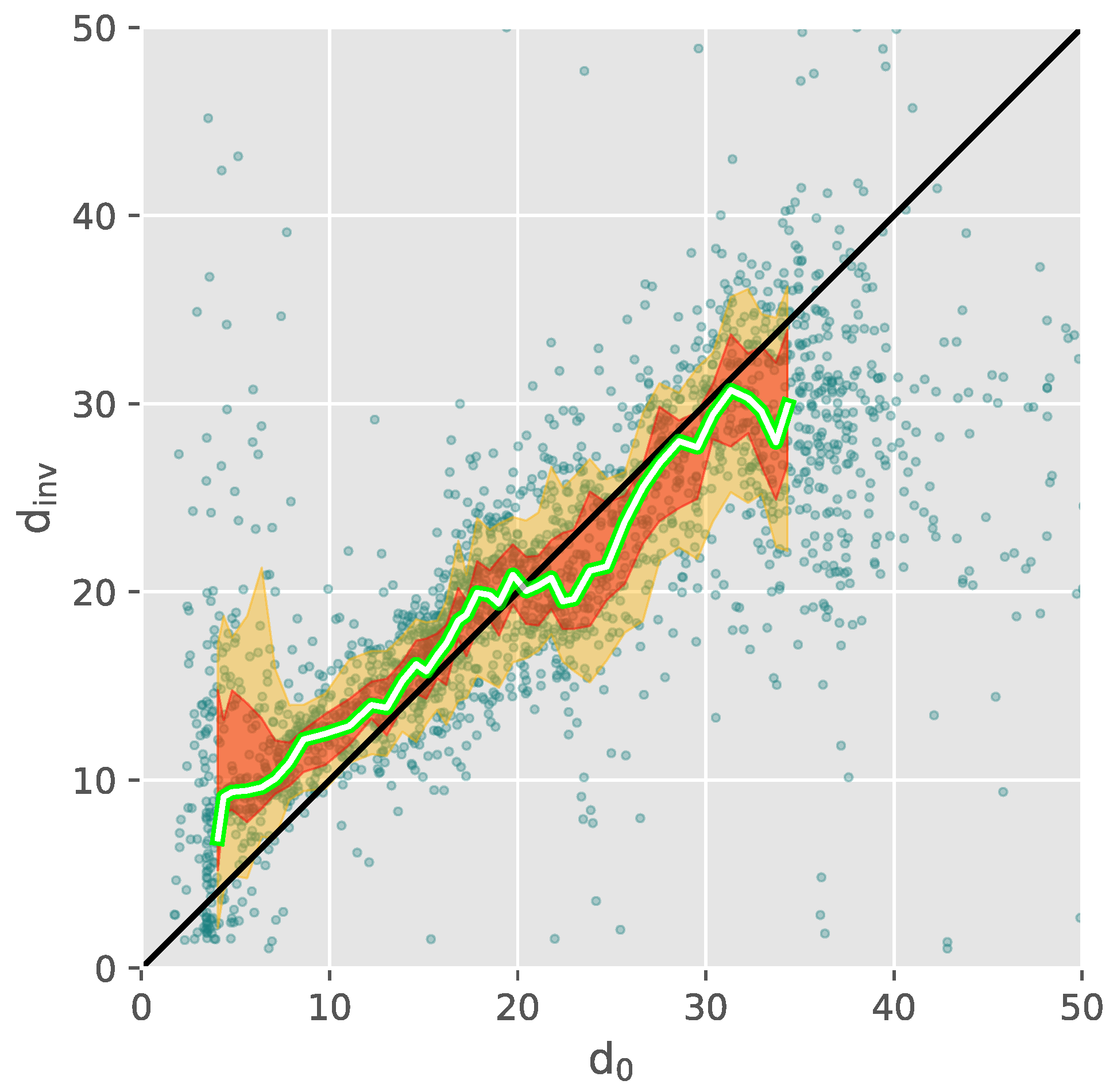
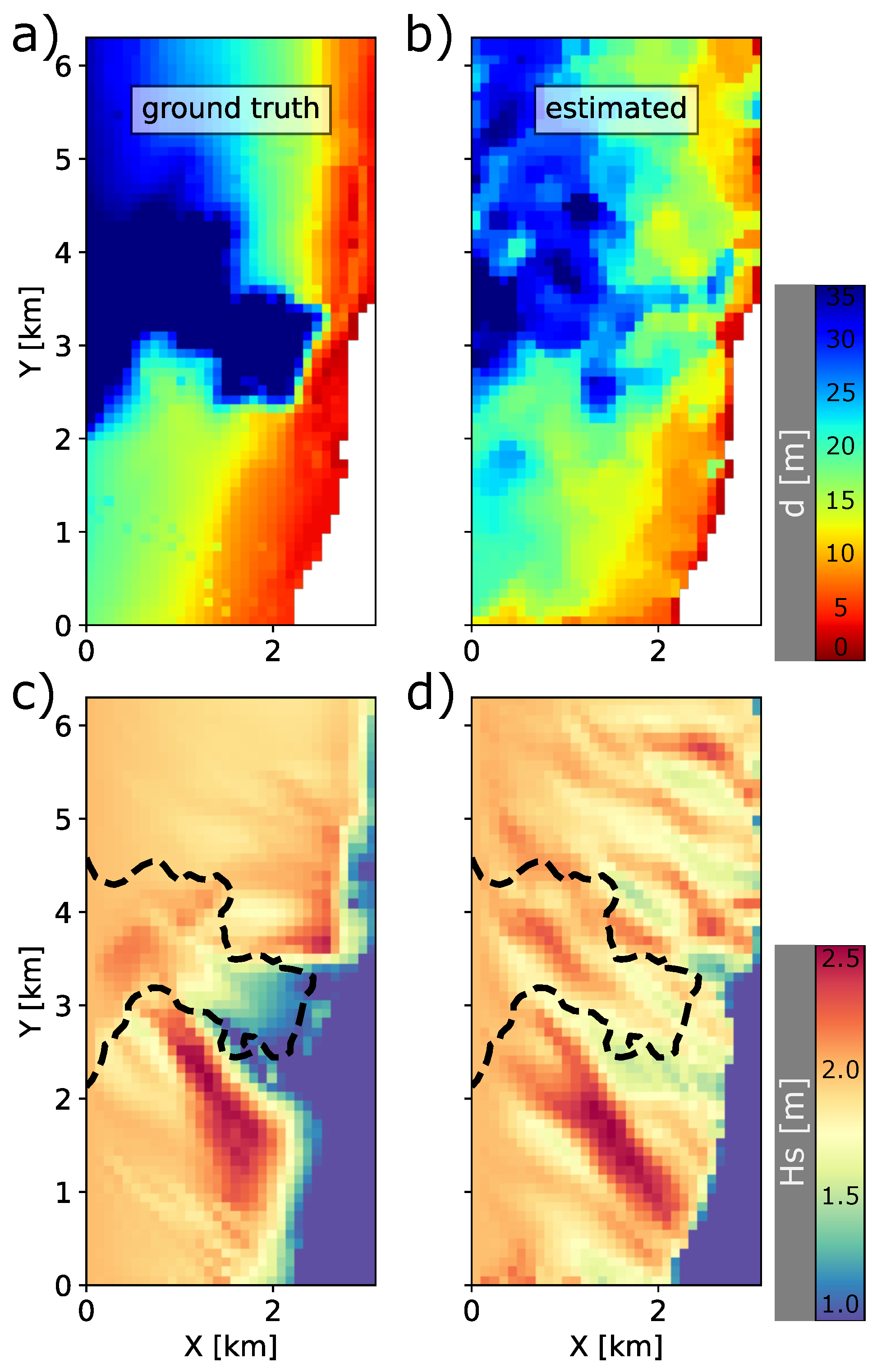
4.2. Results from Depth Inversion
5. Discussion
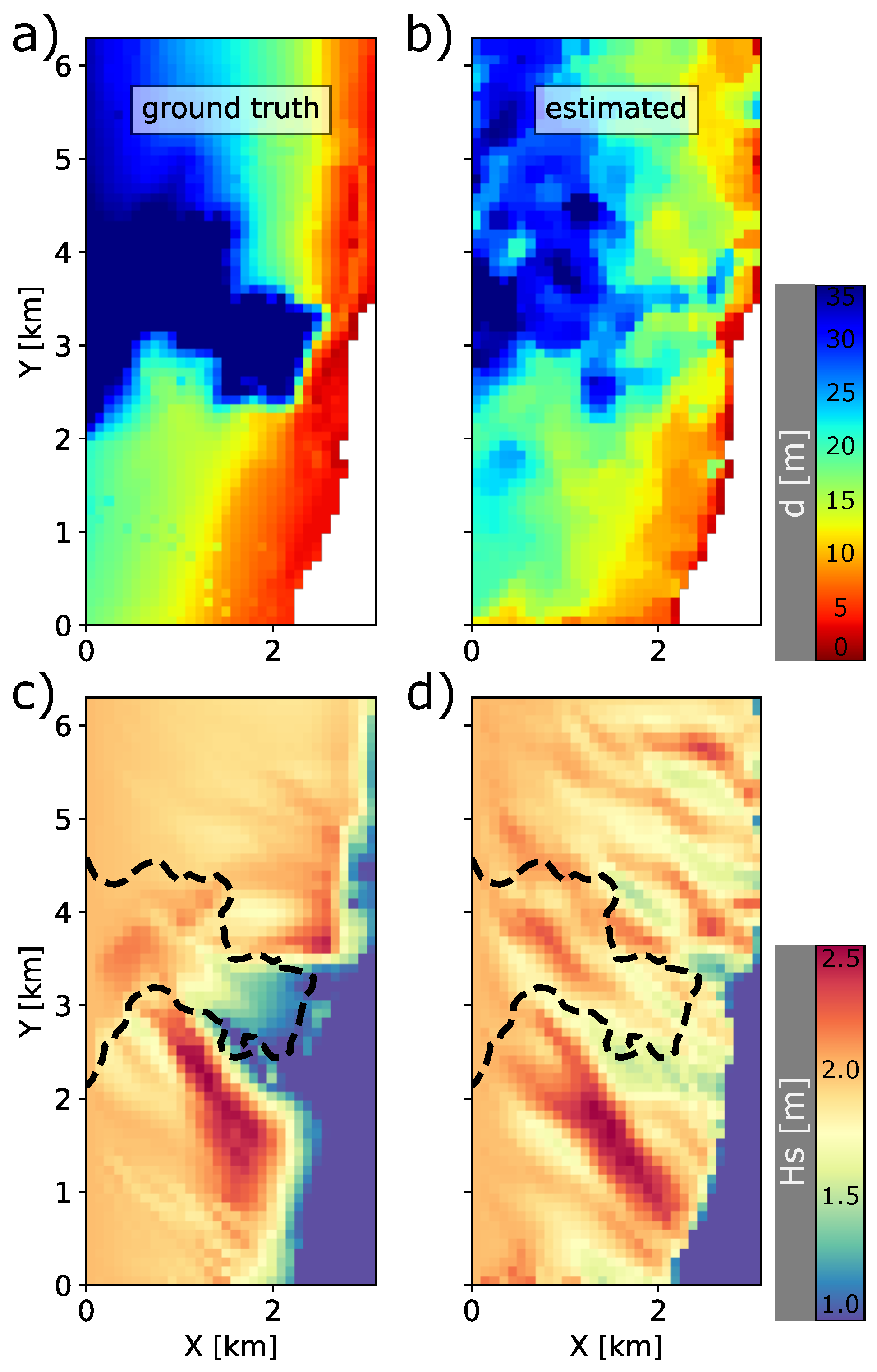
5.1. Using Satellite-Derived Depths for Coastal Wave Height Predictions
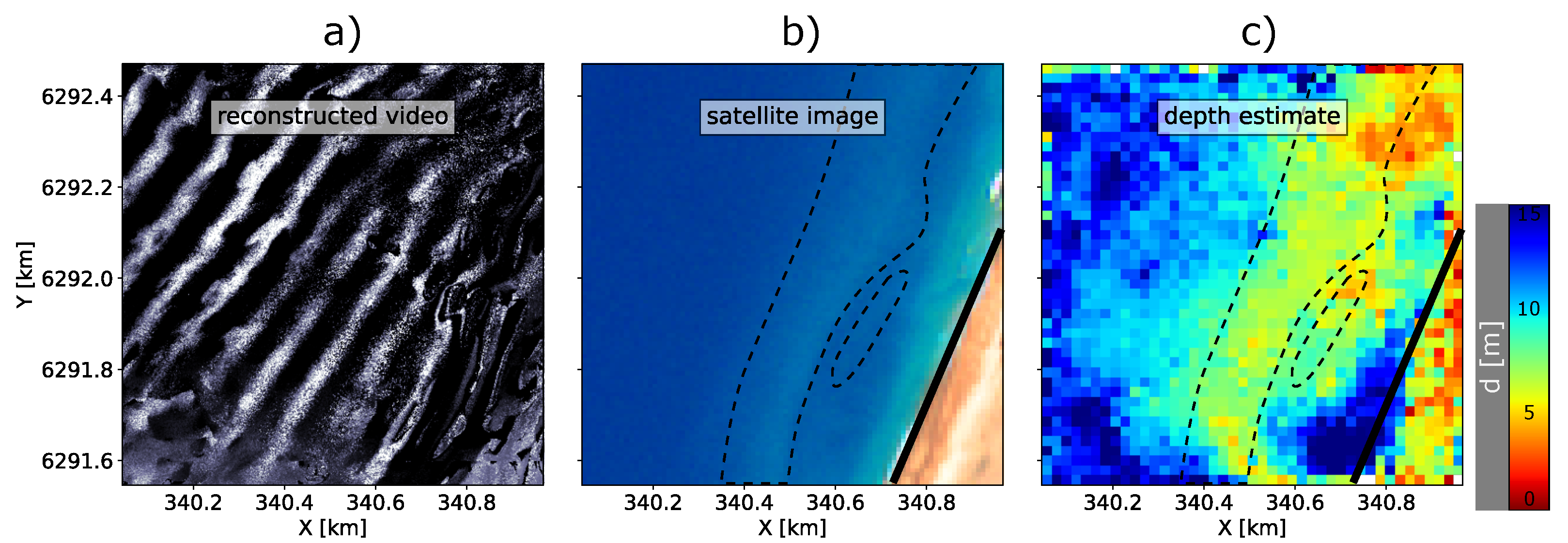
5.2. Satellite-Derived Sandbars
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Depth Inversion Paramter Settings

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
References
- Van Dongeren, A.; Ciavola, P.; Martinez, G.; Viavattene, C.; Bogaard, T.; Ferreira, O.; Higgins, R.; McCall, R. Introduction to RISC-KIT: Resilience-increasing strategies for coasts. Coast. Eng. 2018, 134, 2–9. [Google Scholar] [CrossRef] [Green Version]
- Davidson, M.; Aarninkhof, S.; Van Koningsveld, M.; Holman, R. Developing coastal video monitoring systems in support of coastal zone management. J. Coast. Res. 2006, 2004, 49–56. [Google Scholar]
- De Schipper, M.A.; Ludka, B.C.; Raubenheimer, B.; Luijendijk, A.P.; Schlacher, T.A. Beach nourishment has complex implications for the future of sandy shores. Nat. Rev. Earth Environ. 2021, 2, 70–84. [Google Scholar] [CrossRef]
- Almar, R.; Ranasinghe, R.; Bergsma, E.W.; Diaz, H.; Melet, A.; Papa, F.; Vousdoukas, M.; Athanasiou, P.; Dada, O.; Almeida, L.P.; et al. A global analysis of extreme coastal water levels with implications for potential coastal overtopping. Nat. Commun. 2021, 12, 1–9. [Google Scholar] [CrossRef]
- Vitousek, S.; Barnard, P.L.; Fletcher, C.H.; Frazer, N.; Erikson, L.; Storlazzi, C.D. Doubling of coastal flooding frequency within decades due to sea-level rise. Sci. Rep. 2017, 7, 1–9. [Google Scholar] [CrossRef]
- Almar, R.; Bergsma, E.W.; Thoumyre, G.; Baba, M.W.; Cesbron, G.; Daly, C.; Garlan, T.; Lifermann, A. Global satellite-based coastal bathymetry from waves. Remote Sens. 2021, 13, 4628. [Google Scholar] [CrossRef]
- Bergsma, E.W.; Almar, R. Coastal coverage of ESA’ Sentinel 2 mission. Adv. Space Res. 2020, 65, 2636–2644. [Google Scholar] [CrossRef]
- Li, J.; Roy, D.P. A global analysis of Sentinel-2a, Sentinel-2b and Landsat-8 data revisit intervals and implications for terrestrial monitoring. Remote Sens. 2017, 9, 902. [Google Scholar] [CrossRef] [Green Version]
- Lyzenga, D.R. Remote sensing of bottom reflectance and water attenuation parameters in shallow water using aircraft and landsat data. Int. J. Remote Sens. 1981, 2, 71–82. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Abileah, R. Mapping shallow water depth from satellite. Am. Soc. Photogramm. Remote Sens. 2006, 1, 1–7. [Google Scholar]
- Stockdon, H.F.; Holman, R.A. Estimation of wave phase speed and nearshore bathymetry from video imagery. J. Geophys. Res. Ocean. 2000, 105, 22015–22033. [Google Scholar] [CrossRef]
- Gawehn, M.; de Vries, S.; Aarninkhof, S. A Self-Adaptive Method for Mapping Coastal Bathymetry On-The-Fly from Wave Field Video. Remote Sens. 2021, 13, 4742. [Google Scholar] [CrossRef]
- Holman, R.A.; Brodie, K.L.; Spore, N.J. Surf Zone Characterization Using a Small Quadcopter: Technical Issues and Procedures. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2017–2027. [Google Scholar] [CrossRef]
- Simarro, G.; Calvete, D.; Luque, P.; Orfila, A.; Ribas, F. UBathy: A new approach for bathymetric inversion from video imagery. Remote Sens. 2019, 11, 2722. [Google Scholar] [CrossRef] [Green Version]
- Almar, R.; Bergsma, E.W.; Gawehn, M.A.; Aarninkhof, S.G.; Benshila, R. High-frequency Temporal Wave-pattern Reconstruction from a Few Satellite Images: A New Method towards Estimating Regional Bathymetry. J. Coast. Res. 2020, 95, 996–1000. [Google Scholar] [CrossRef]
- Bergsma, E.W.; Almar, R.; Maisongrande, P. Radon-augmented Sentinel-2 satellite imagery to derive wave-patterns and regional bathymetry. Remote Sens. 2019, 11, 1918. [Google Scholar] [CrossRef] [Green Version]
- Gabor, D. A Theory of Communication. J. Inst. Electr. Eng.-Part III Radio Commun. Eng. 1946, 93, 429–441. [Google Scholar] [CrossRef]
- Almeida, L.P.; Almar, R.; Bergsma, E.W.; Berthier, E.; Baptista, P.; Garel, E.; Dada, O.A.; Alves, B. Deriving high spatial-resolution coastal topography from sub-meter satellite stereo imagery. Remote Sens. 2019, 11, 590. [Google Scholar] [CrossRef] [Green Version]
- Abileah, R. Mapping near shore bathymetry using wave kinematics in a time series of WorldView-2 satellite images. Int. Geosci. Remote Sens. Symp. (IGARSS) 2013, 2, 2274–2277. [Google Scholar] [CrossRef]
- Almar, R.; Bergsma, E.W.; Maisongrande, P.; de Almeida, L.P.M. Wave-derived coastal bathymetry from satellite video imagery: A showcase with Pleiades persistent mode. Remote Sens. Environ. 2019, 231, 111263. [Google Scholar] [CrossRef]
- De Michele, M.; Raucoules, D.; Idier, D.; Smai, F.; Foumelis, M. Shallow bathymetry from multiple sentinel 2 images via the joint estimation of wave celerity and wavelength. Remote Sens. 2021, 13, 2149. [Google Scholar] [CrossRef]
- Abessolo Ondoa, G.; Almar, R.; Castelle, B.; Testut, L.; Léger, F.; Sohou, Z.; Bonou, F.; Bergsma, E.W.; Meyssignac, B.; Larson, M. Sea level at the coast from video-sensed waves: Comparison to tidal gauges and satellite altimetry. J. Atmos. Ocean. Technol. 2019, 36, 1591–1603. [Google Scholar] [CrossRef]
- Holman, R.; Plant, N.; Holland, T. CBathy: A robust algorithm for estimating nearshore bathymetry. J. Geophys. Res. Ocean. 2013, 118, 2595–2609. [Google Scholar] [CrossRef]
- Bergsma, E.W.; Almar, R.; Melo de Almeida, L.P.; Sall, M. On the operational use of UAVs for video-derived bathymetry. Coast. Eng. 2019, 152, 103527. [Google Scholar] [CrossRef]
- Holman, R.A.; Holland, K.T.; Lalejini, D.M.; Spansel, S.D. Surf zone characterization from Unmanned Aerial Vehicle imagery. Ocean Dyn. 2011, 61, 1927–1935. [Google Scholar] [CrossRef]
- Bell, P. Shallow water bathymetry derived from an analysis of X-band marine radar images of waves. Coast. Eng. 1999, 37, 513–527. [Google Scholar] [CrossRef]
- Gawehn, M.; van Dongeren, A.; de Vries, S.; Swinkels, C.; Hoekstra, R.; Aarninkhof, S.; Friedman, J. The application of a radar-based depth inversion method to monitor nearshore nourishments on an open sandy coast and an ebb-tidal delta. Coast. Eng. 2020, 159, 103716. [Google Scholar] [CrossRef]
- Honegger, D.A.; Haller, M.C.; Holman, R.A. High-resolution bathymetry estimates via X-band marine radar: 1. beaches. Coast. Eng. 2019, 149, 39–48. [Google Scholar] [CrossRef]
- Senet, C.M.; Seemann, J.; Flampouris, S.; Ziemer, F. Determination of bathymetric and current maps by the method DiSC based on the analysis of nautical X-band radar image sequences of the sea surface (November 2007). IEEE Trans. Geosci. Remote Sens. 2008, 46, 2267–2279. [Google Scholar] [CrossRef]
- Bell, P. Mapping Shallow Water Coastal Areas Using a Standard Marine X-Band Radar. In Proceedings of the Hydro8, Liverpool, UK, 4–6 November 2008; International Federation of Hydrographic Societies: Lemmer, The Netherlands, 2008; pp. 1–9. [Google Scholar]
- Holman, R.; Bergsma, E.W. Updates to and performance of the cbathy algorithm for estimating nearshore bathymetry from remote sensing imagery. Remote Sens. 2021, 13, 3996. [Google Scholar] [CrossRef]
- Palmsten, M.L.; Brodie, K.L. The Coastal Imaging Research Network (CIRN). Remote Sens. 2022, 14, 453. [Google Scholar] [CrossRef]
- Almar, R.; Bergsma, E.W.; Maisongrande, P.; Giros, A.; Almeida, L.P. On the application of a two-dimension spatio-temporal cross-correlation method to inverse coastal bathymetry from waves using a satellite-based video sequence. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Yokohama, Japan, 28 July–2 August 2019; pp. 8205–8208. [Google Scholar] [CrossRef]
- Coeurdevey, L.; Gabriel-Robez, C. Pléiades Imagery—User Guide; Technical Report; Astrium GEO-Information Services: Toulouse, France, 2012. [Google Scholar]
- Jouanneau, J.M.; Latouche, C. Continental fluxes to the Bay of Biscay: Processes and behaviour. Ocean Shorel. Manag. 1989, 12, 477–485. [Google Scholar] [CrossRef]
- Mazières, A.; Gillet, H.; Castelle, B.; Mulder, T.; Guyot, C.; Garlan, T.; Mallet, C. High-resolution morphobathymetric analysis and evolution of Capbreton submarine canyon head (Southeast Bay of Biscay-French Atlantic Coast) over the last decade using descriptive and numerical modeling. Mar. Geol. 2014, 351, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Almar, R.; Bergsma, E.W.J.; Catalan, P.A.; Cienfuegos, R.; Suarez, L.; Lucero, F.; Nicolae Lerma, A.; Desmazes, F.; Perugini, E.; Palmsten, M.L.; et al. Sea State from Single Optical Images: A Methodology to Derive Wind-Generated Ocean Waves from Cameras, Drones and Satellites. Remote Sens. 2021, 13, 679. [Google Scholar] [CrossRef]
- Kuik, A.J.; van Vledder, G.P.; Holthuijsen, L.H. A Method for the Routine Analysis of Pitch-and-Roll Buoy Wave Data. J. Phys. Oceanogr. 1988, 18, 1020–1034. [Google Scholar] [CrossRef]
- Campbell, R.; Martinez, A.; Letetrel, C.; Rio, A. Methodology for estimating the French tidal current energy resource. Int. J. Mar. Energy 2017, 19, 256–271. [Google Scholar] [CrossRef]
- Booij, N.; Ris, R.C.; Holthuijsen, L.H. A third-generation wave model for coastal regions 1. Model description and validation. J. Geophys. Res. Ocean. 1999, 104, 7649–7666. [Google Scholar] [CrossRef] [Green Version]
- Baldock, T.E.; Holmes, P.; Bunker, S.; Van Weert, P. Cross-shore hydrodynamics within an unsaturated surf zone. Coast. Eng. 1998, 34, 173–196. [Google Scholar] [CrossRef]
- Jonsson, I.G. Wave Boundary Layers and Friction Factors. In Coastal Engineering 1966; American Society of Civil Engineers: New York, NY, USA, 1967; pp. 127–148. [Google Scholar] [CrossRef]
- Lastiri, X.; Abadie, S.; Maron, P.; Delpey, M.; Liria, P.; Mader, J.; Roeber, V. Wave energy assessment in the south aquitaine nearshore zone from a 44-year hindcast. J. Mar. Sci. Eng. 2020, 8, 199. [Google Scholar] [CrossRef] [Green Version]
- Manian, D.; Kaihatu, J.M.; Zechman, E.M. Using genetic algorithms to optimize bathymetric sampling for predictive model input. J. Atmos. Ocean. Technol. 2012, 29, 464–477. [Google Scholar] [CrossRef]
- Kaihatu, J.M.; Edwards, K.L.; O’Reilly, W.C. Model predictions of nearshore processes near complex bathymetry. Ocean. Conf. Rec. (IEEE) 2002, 2, 685–691. [Google Scholar] [CrossRef]
- Bosboom, J.; Stive, M.J.F. Coastal Dynamics; TU Delft Open: Delft, The Netherlands, 2021; p. 595. [Google Scholar] [CrossRef]
- Aarninkhof, S.G.J.; Ruessink, B.G.; Roelvink, J.A. Nearshore subtidal bathymetry from time-exposure video images. J. Geophys. Res. Ocean. 2005, 110, 1–13. [Google Scholar] [CrossRef]
- Van Dongeren, A.; Plant, N.; Cohen, A.; Roelvink, D.; Haller, M.C.; Catalán, P. Beach Wizard: Nearshore bathymetry estimation through assimilation of model computations and remote observations. Coast. Eng. 2008, 55, 1016–1027. [Google Scholar] [CrossRef]
- Jawak, S.D.; Vadlamani, S.S.; Luis, A.J. A Synoptic Review on Deriving Bathymetry Information Using Remote Sensing Technologies: Models, Methods and Comparisons. Adv. Remote Sens. 2015, 4, 147–162. [Google Scholar] [CrossRef] [Green Version]
- Huang, W.G.; Fu, B.; Zhou, C.B.; Yang, J.S.; Shi, A.Q.; Li, D.L. Shallow water bathymetric surveys by spaceborne synthetic aperture radar. Int. Geosci. Remote. Sens. Symp. (IGARSS) 2001, 6, 2810–2812. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gawehn, M.; Almar, R.; Bergsma, E.W.J.; de Vries, S.; Aarninkhof, S. Depth Inversion from Wave Frequencies in Temporally Augmented Satellite Video. Remote Sens. 2022, 14, 1847. https://doi.org/10.3390/rs14081847
Gawehn M, Almar R, Bergsma EWJ, de Vries S, Aarninkhof S. Depth Inversion from Wave Frequencies in Temporally Augmented Satellite Video. Remote Sensing. 2022; 14(8):1847. https://doi.org/10.3390/rs14081847
Chicago/Turabian StyleGawehn, Matthijs, Rafael Almar, Erwin W. J. Bergsma, Sierd de Vries, and Stefan Aarninkhof. 2022. "Depth Inversion from Wave Frequencies in Temporally Augmented Satellite Video" Remote Sensing 14, no. 8: 1847. https://doi.org/10.3390/rs14081847
APA StyleGawehn, M., Almar, R., Bergsma, E. W. J., de Vries, S., & Aarninkhof, S. (2022). Depth Inversion from Wave Frequencies in Temporally Augmented Satellite Video. Remote Sensing, 14(8), 1847. https://doi.org/10.3390/rs14081847