
Prediction of Arrival Flight Operation Strategies under Convective Weather Based on Trajectory Clustering

Abstract
:1. Introduction
2. Methods
2.1. Classification of Convective Weather
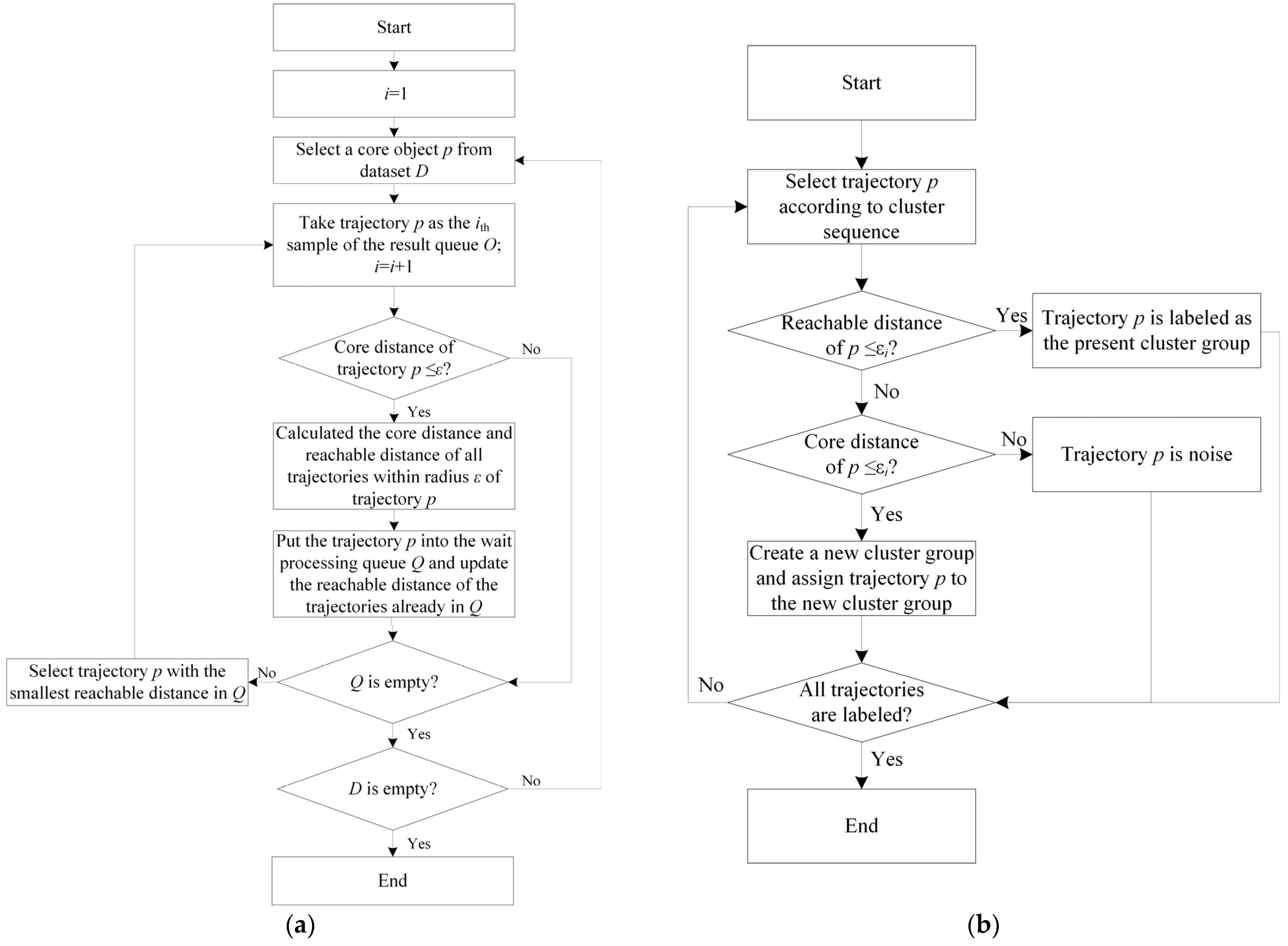
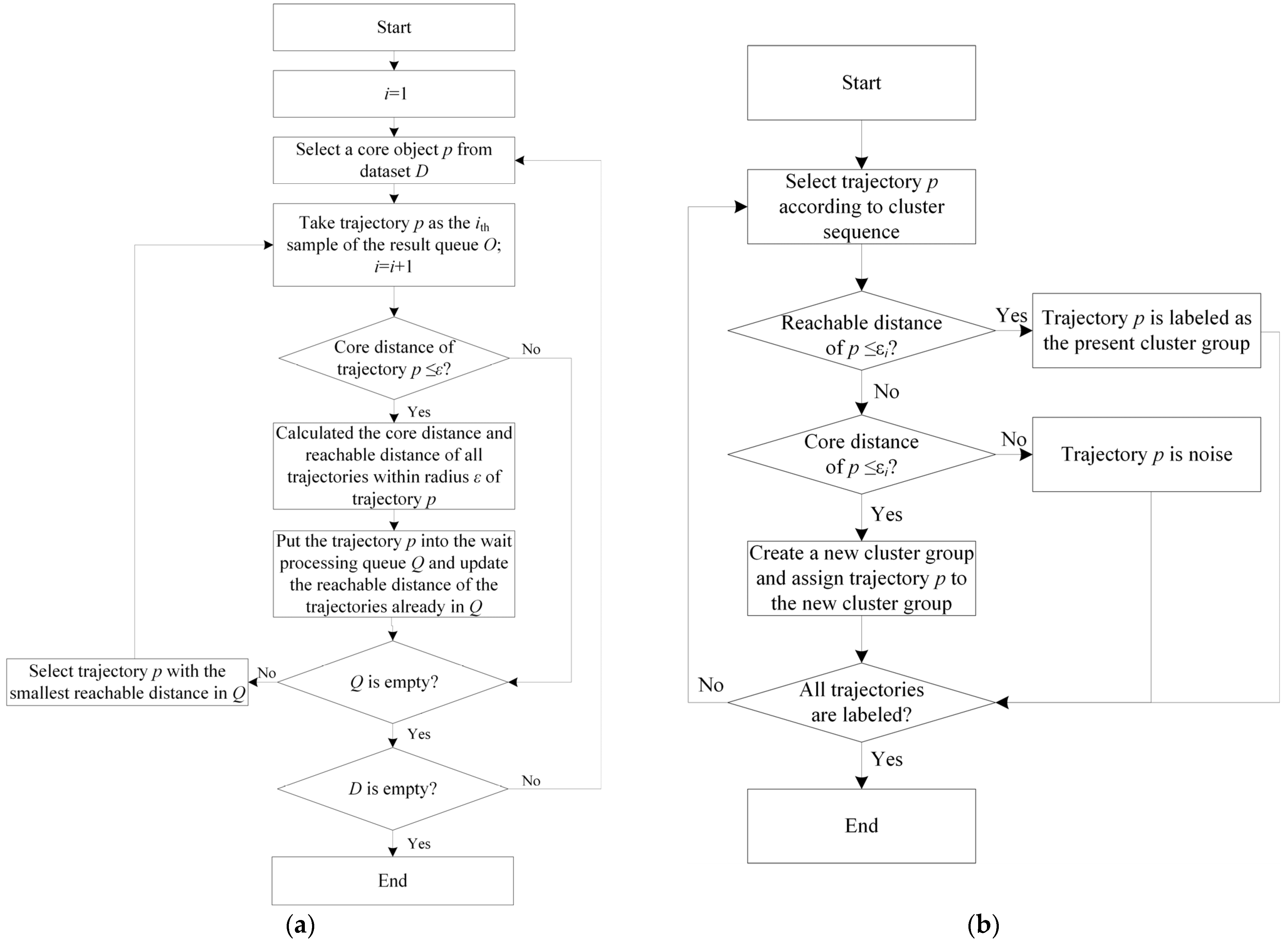
2.2. Trajectory Clustering Based on the OPTICS Algorithm
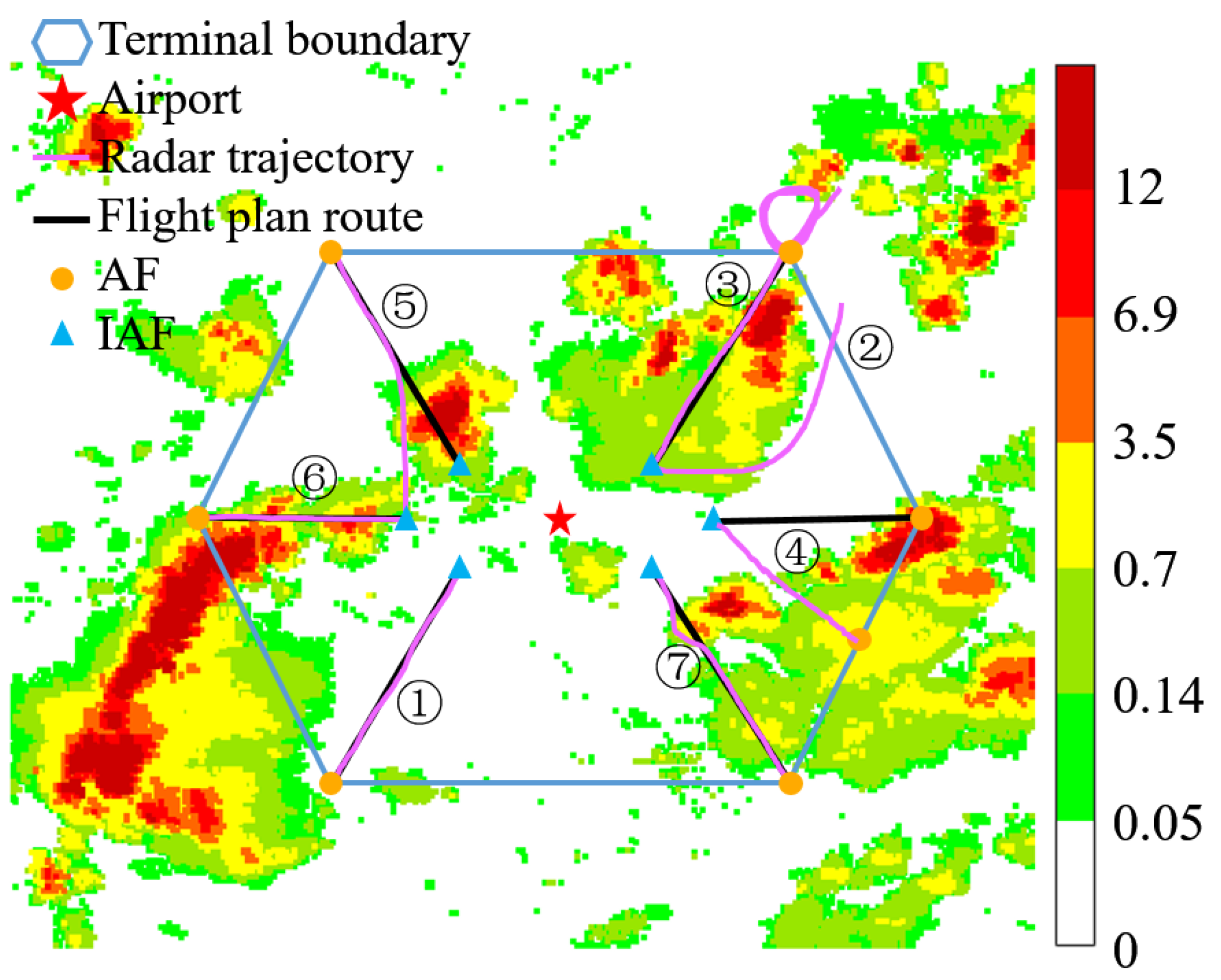
2.3. Categories of Arrival Flight Operation Strategies
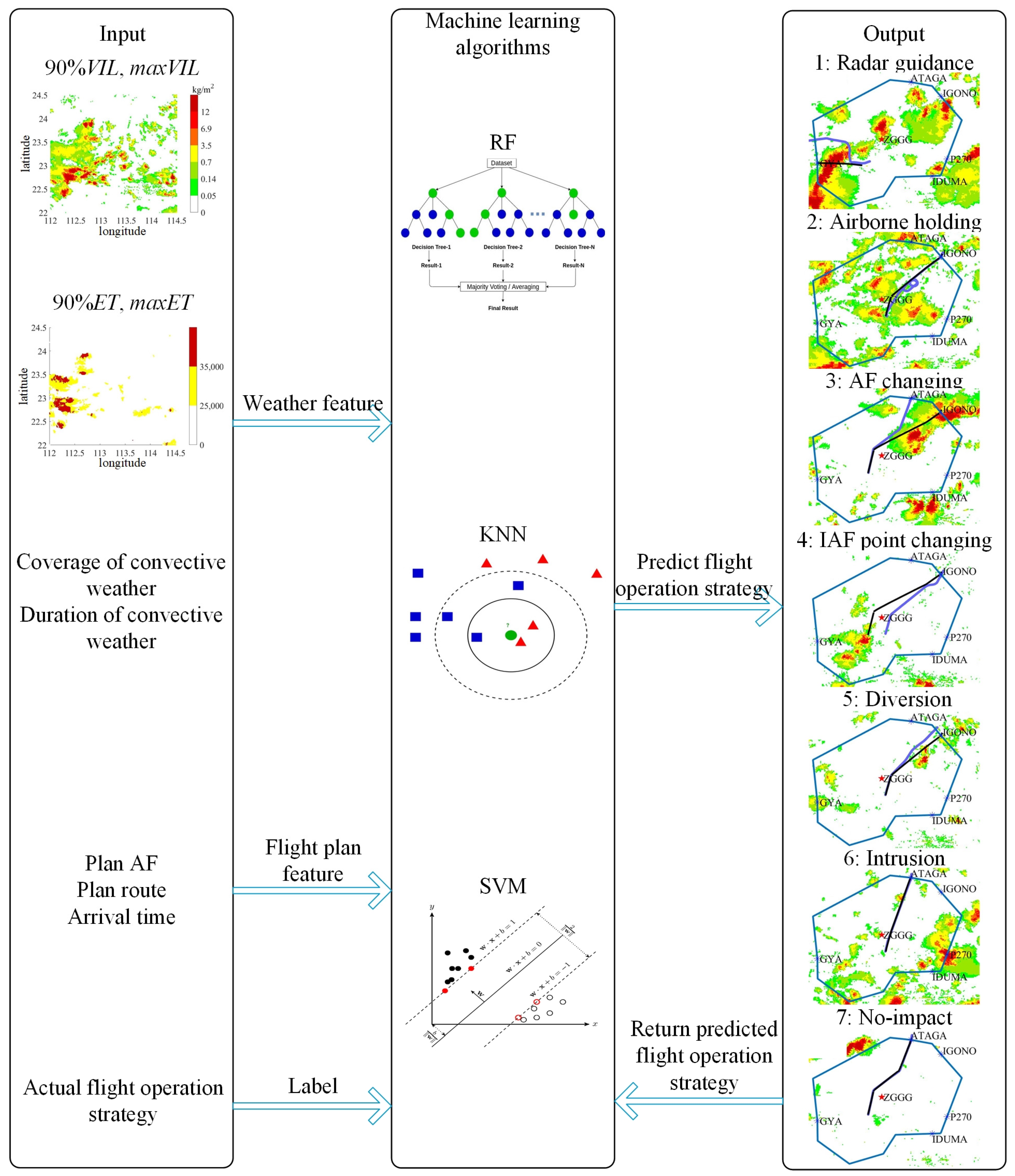
2.4. AFOSPM and Machine Learning Algorithms
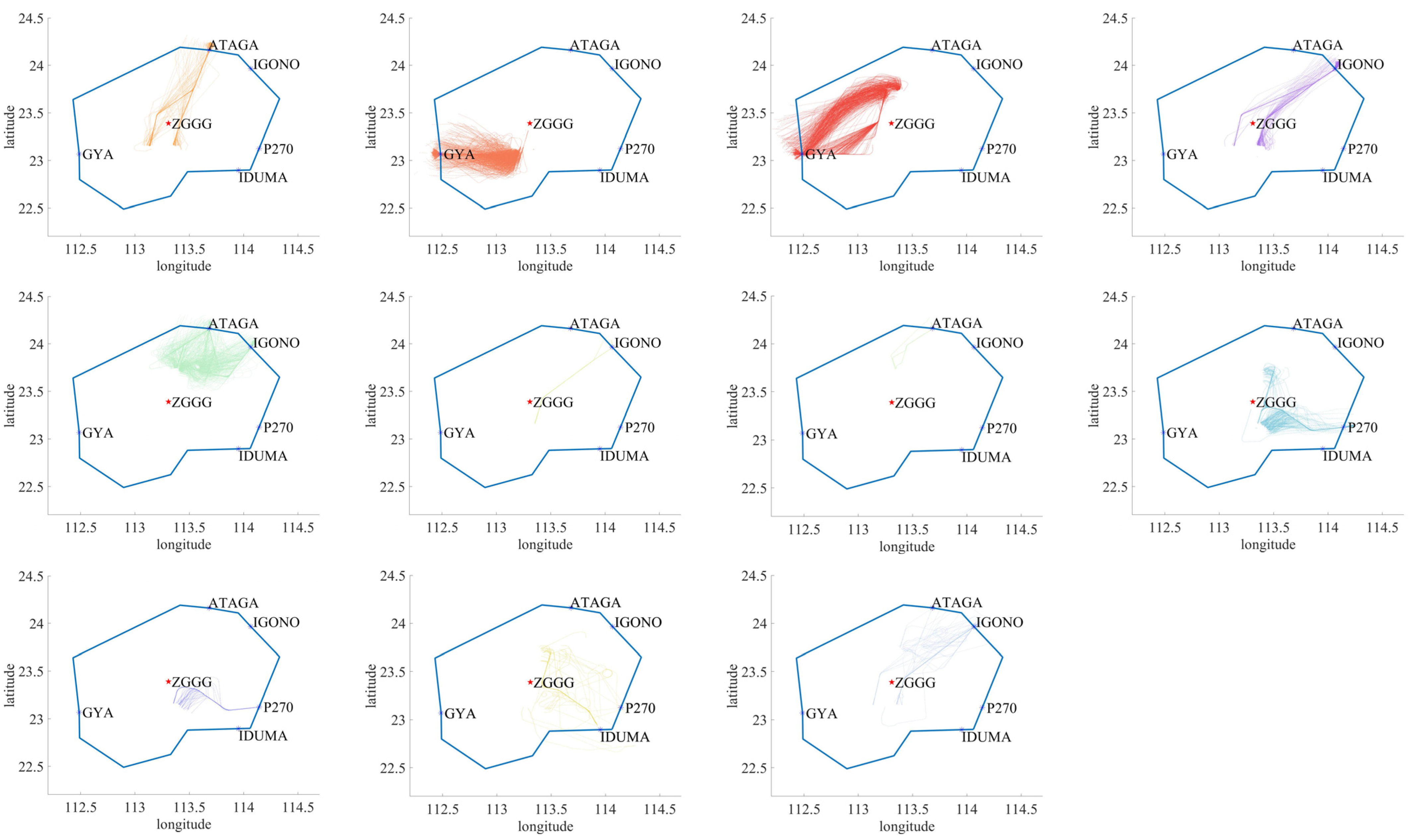
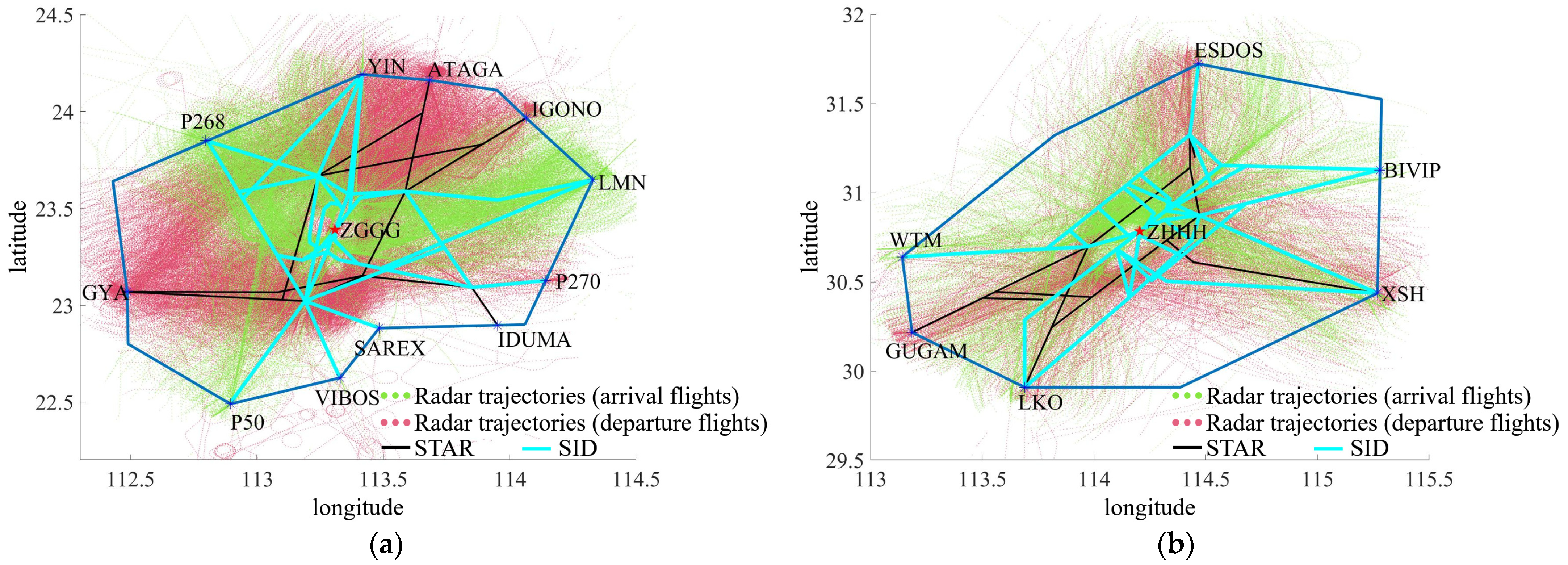
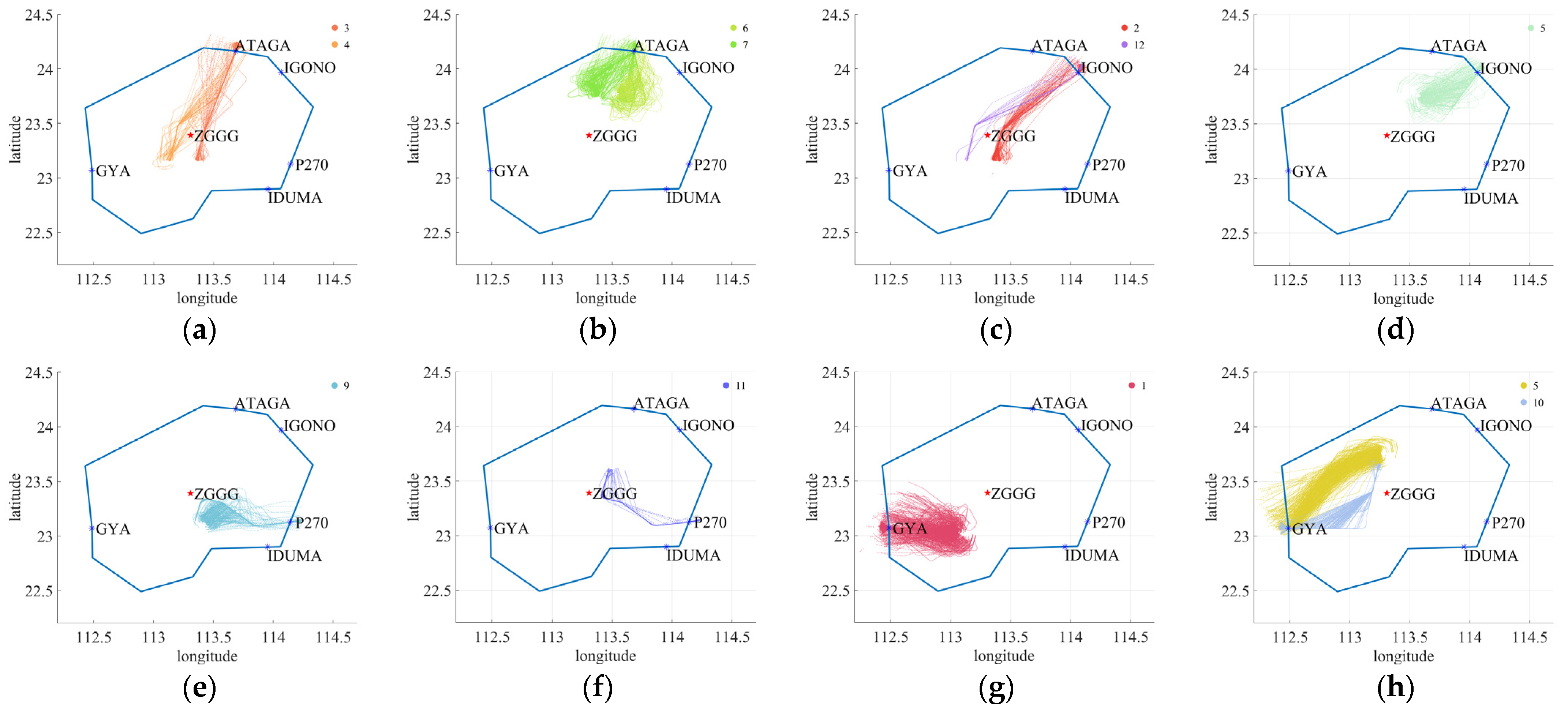
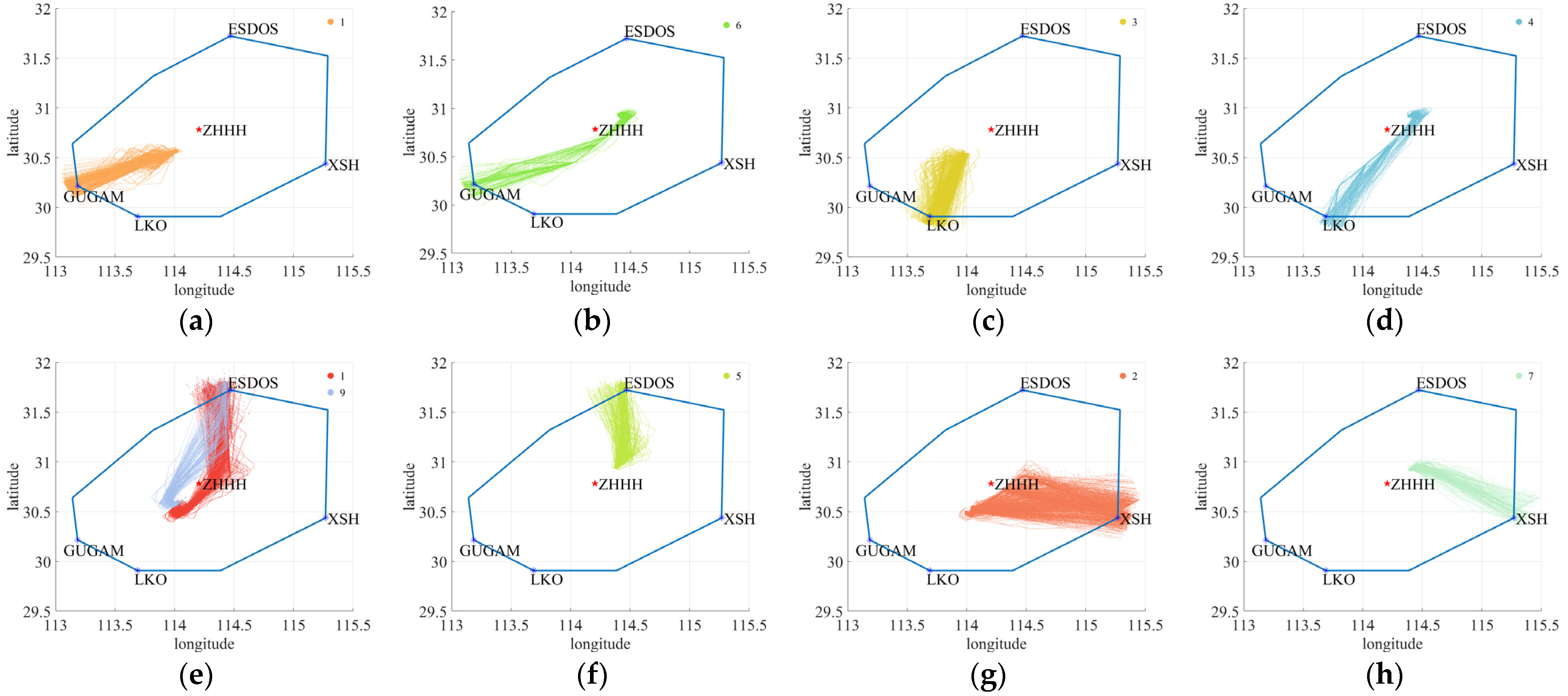
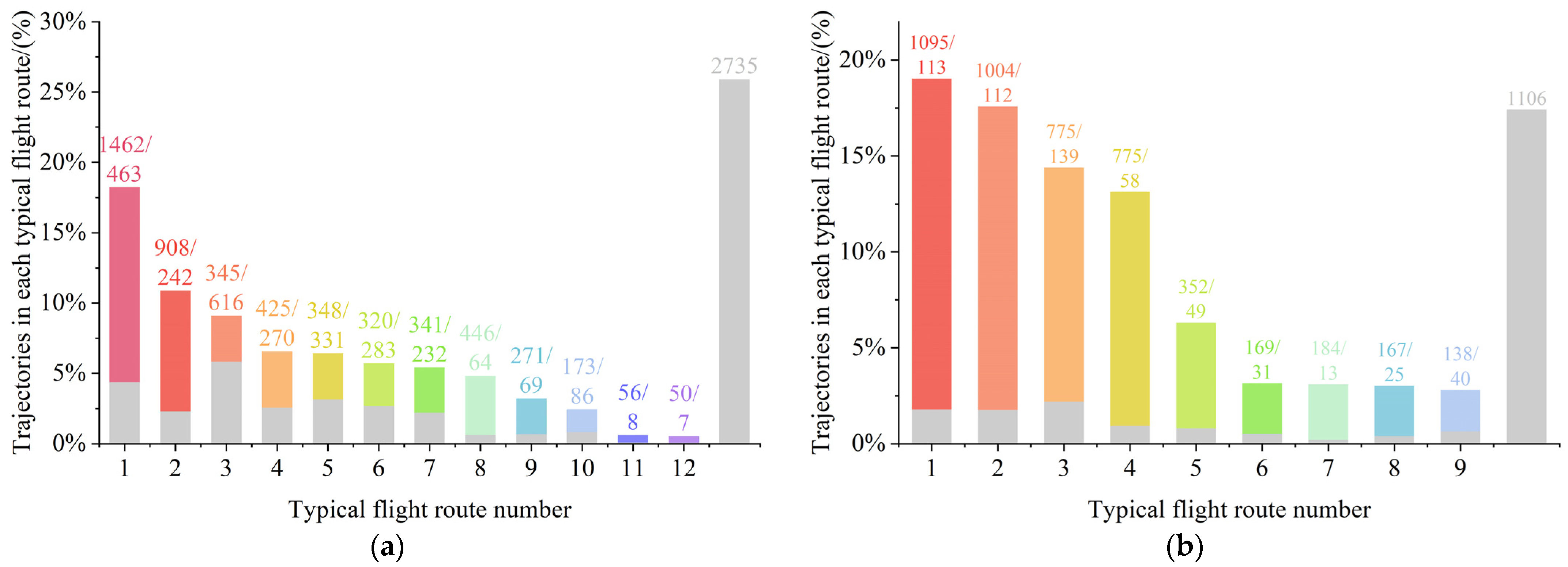
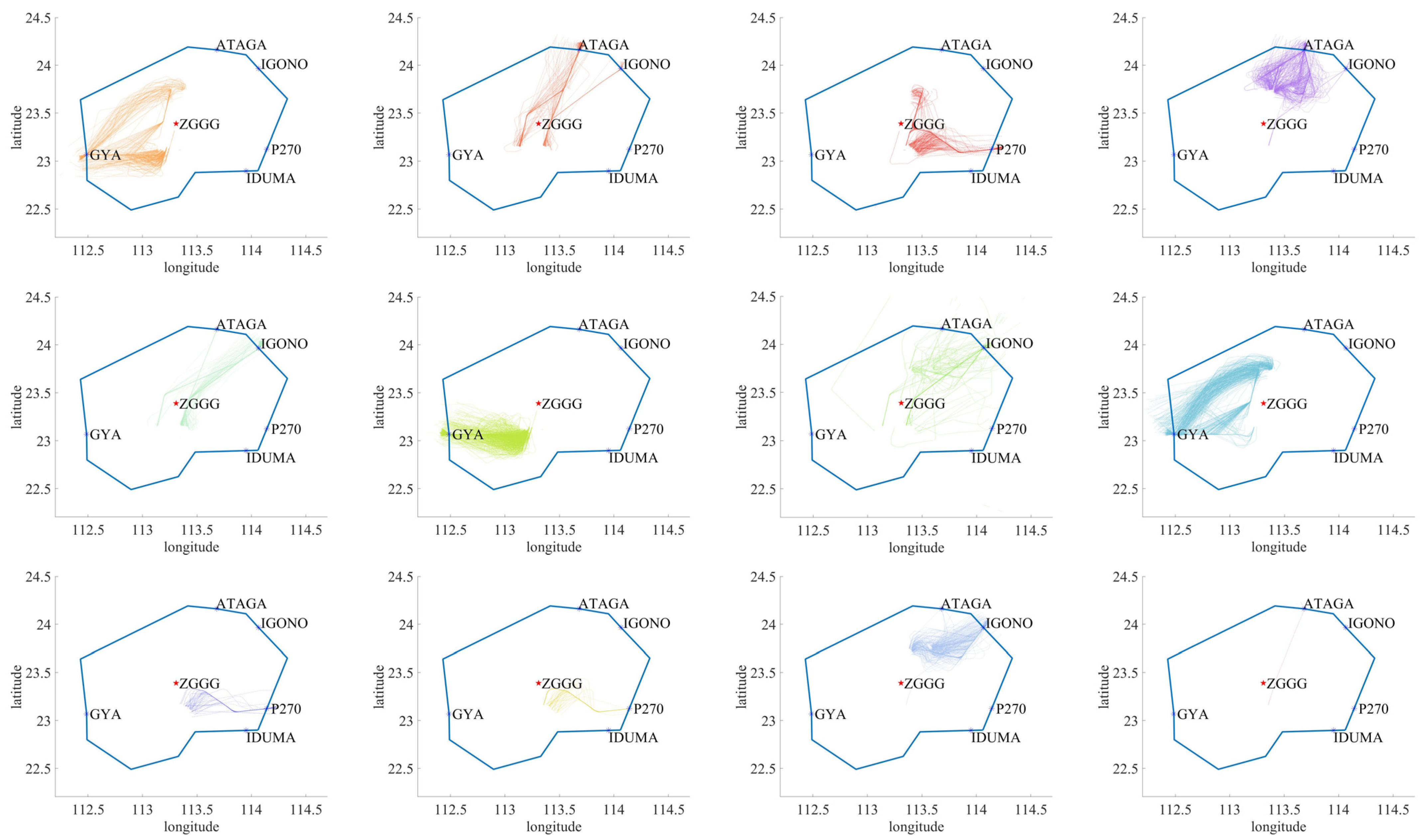
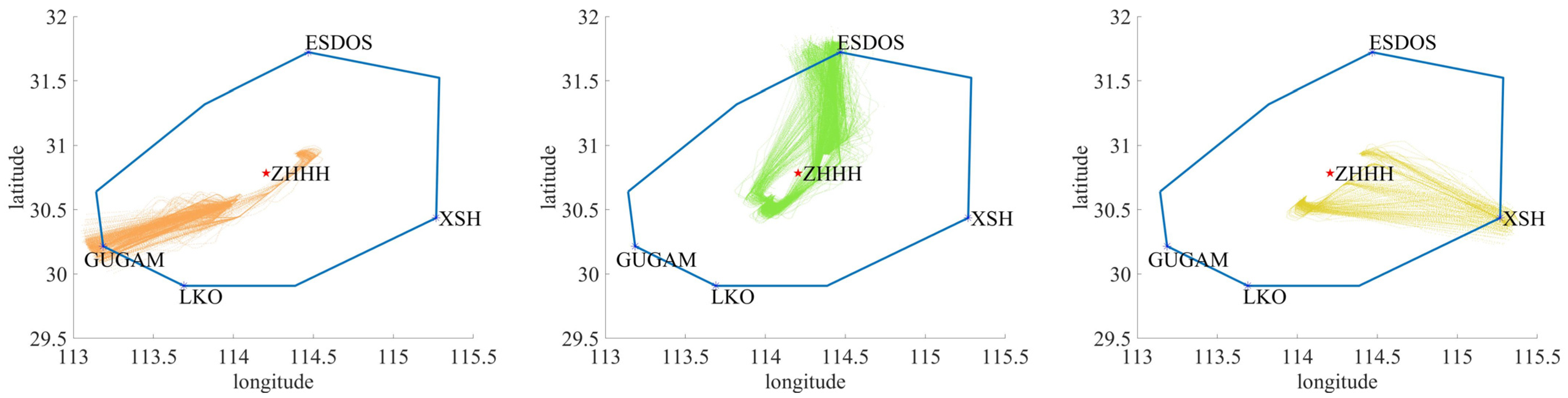
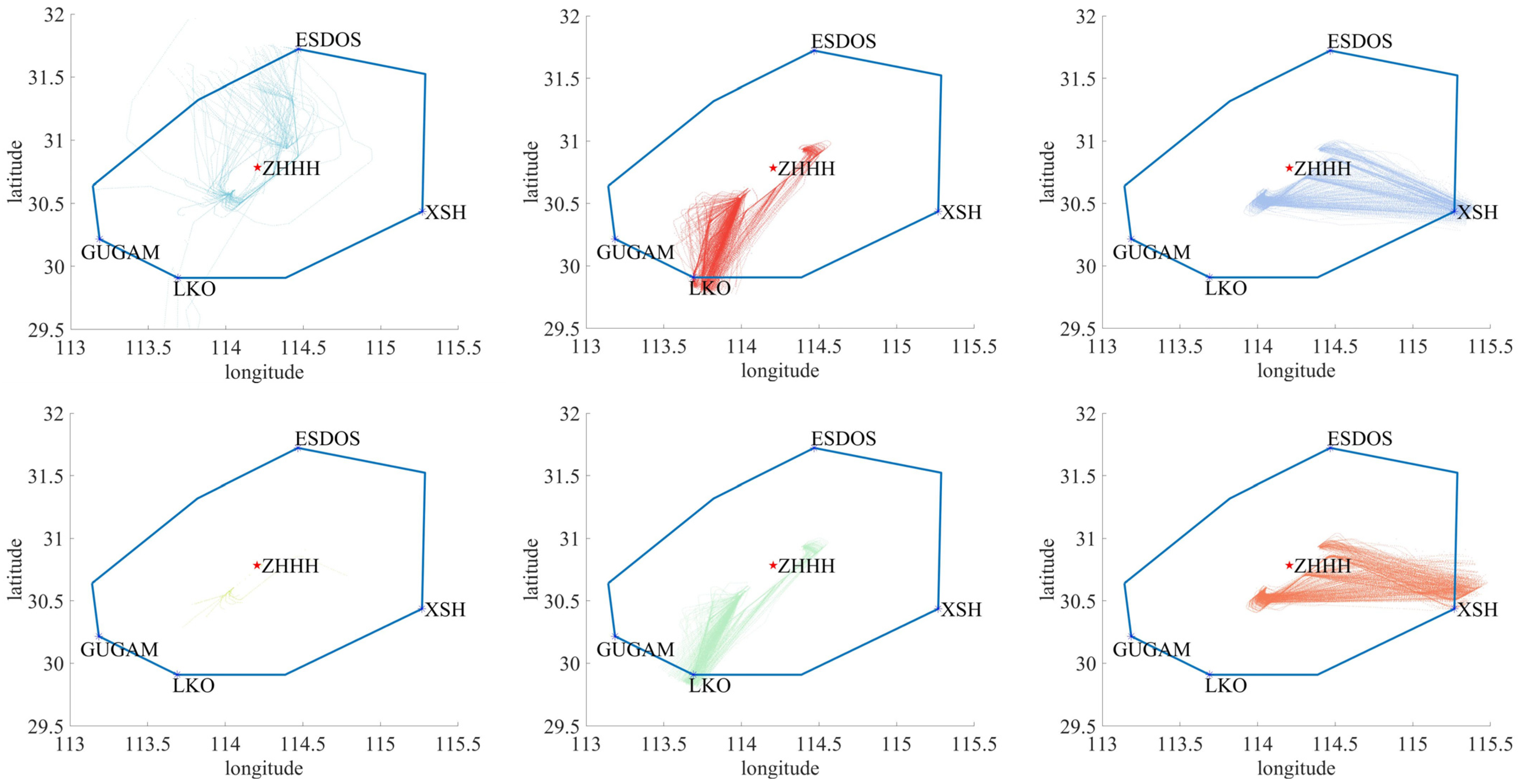
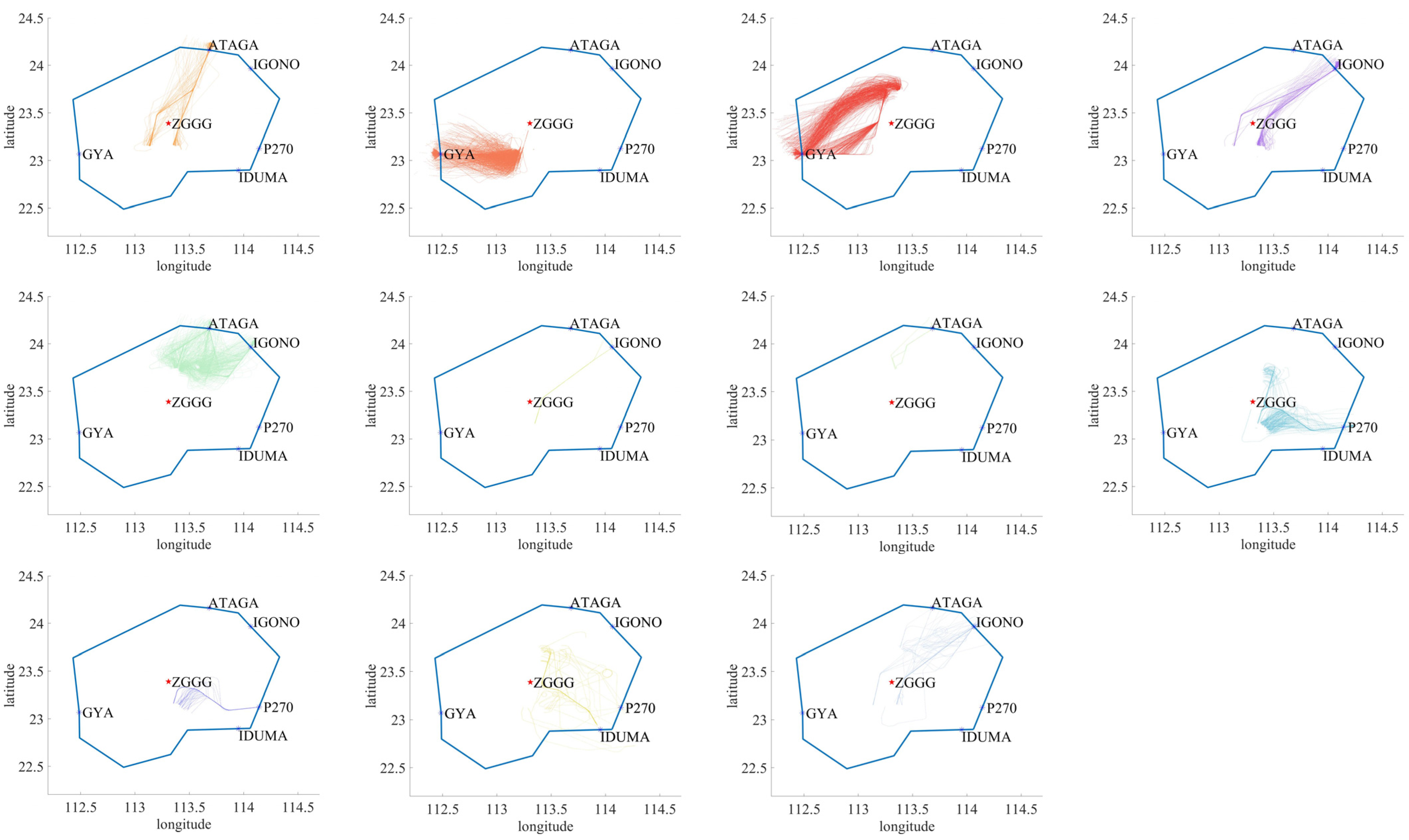
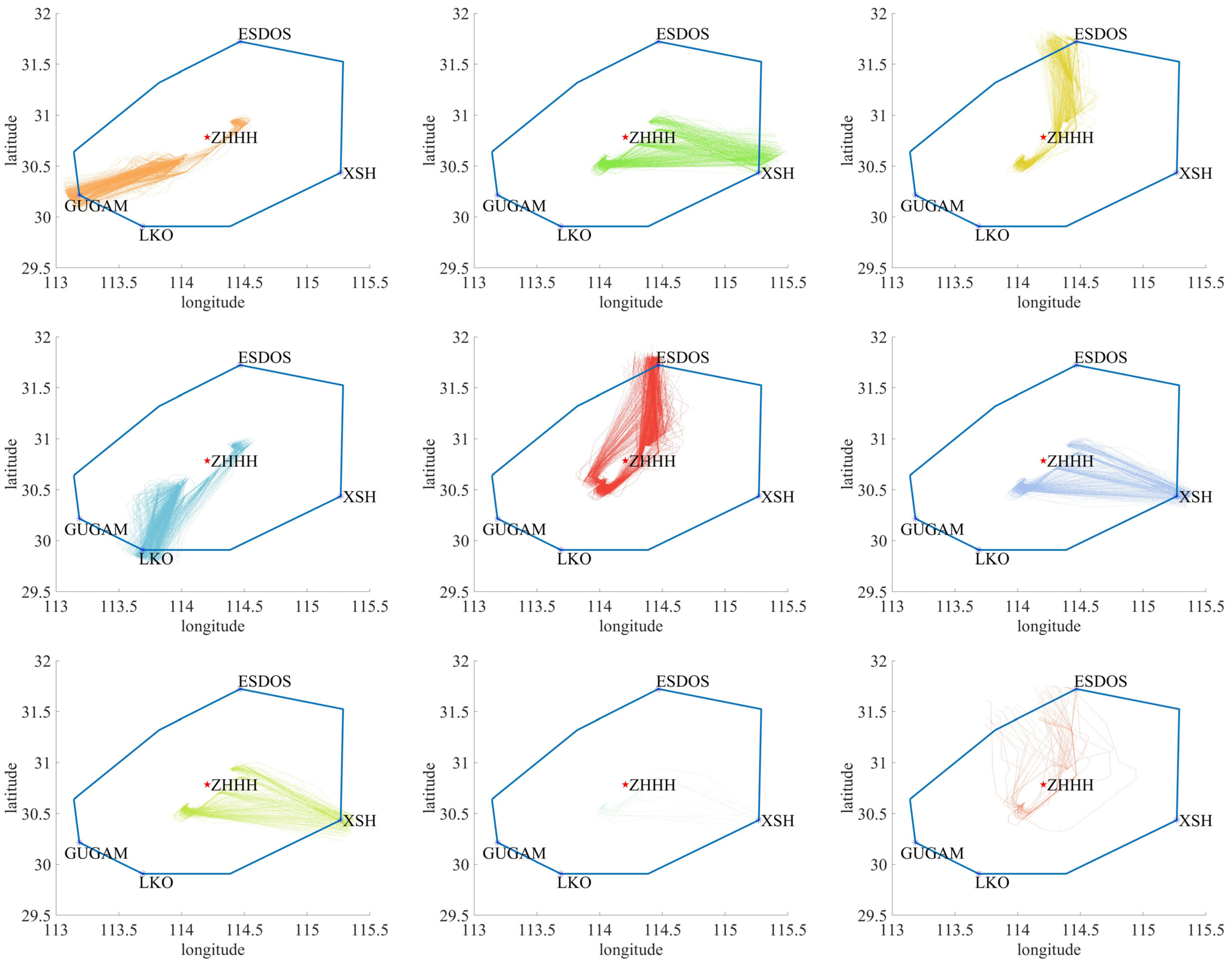
3. Trajectory Clustering Results
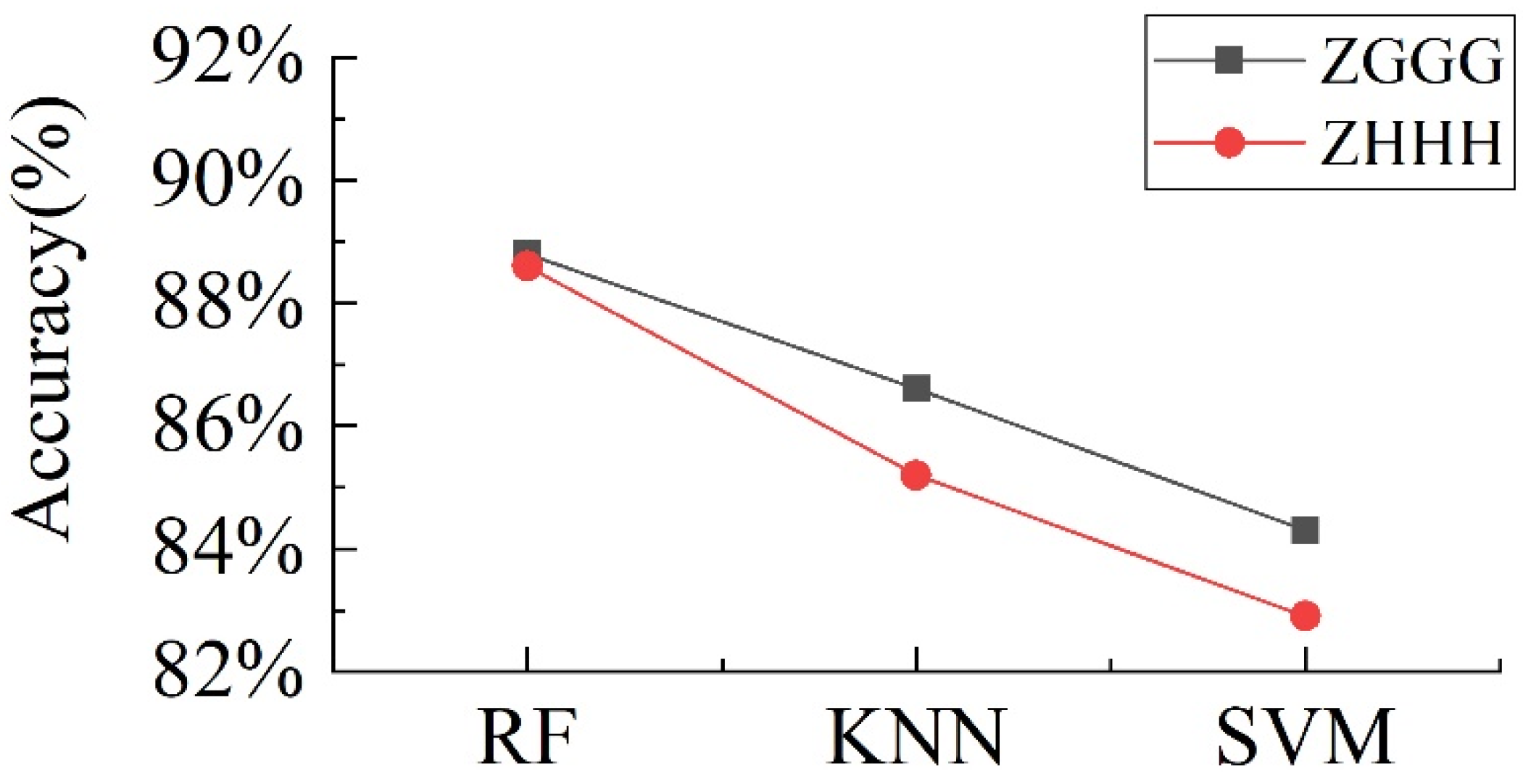
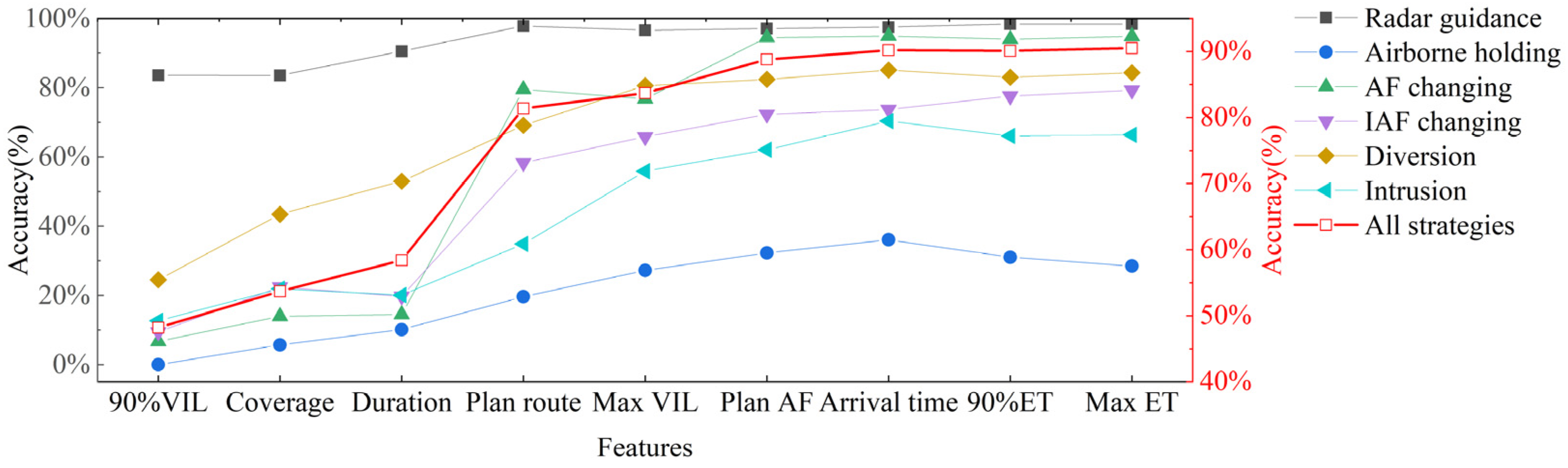
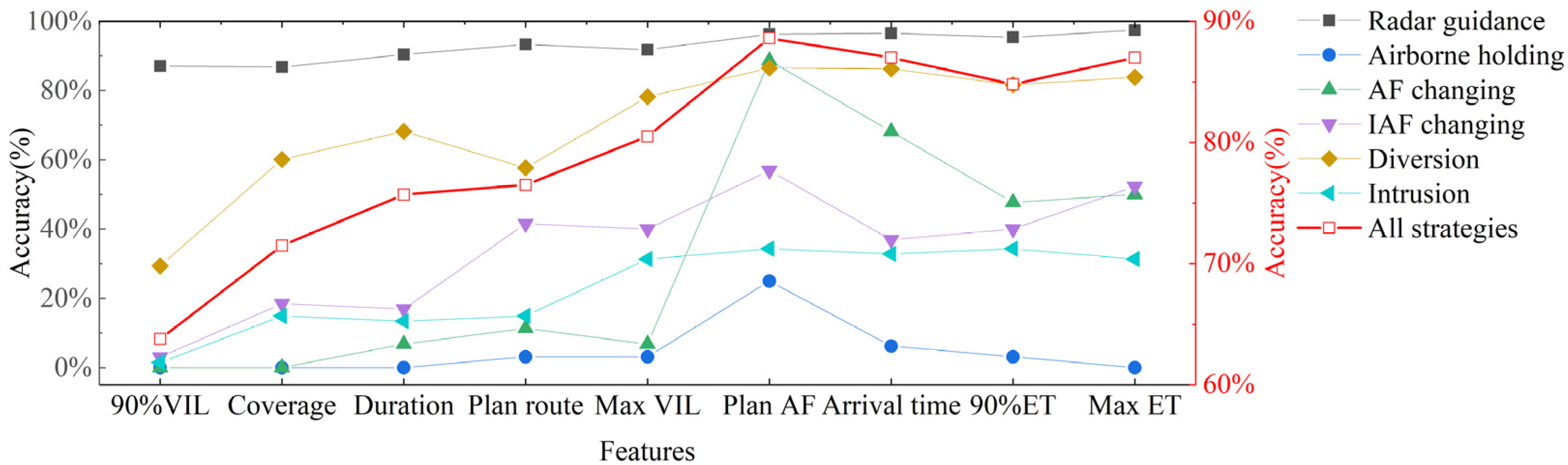
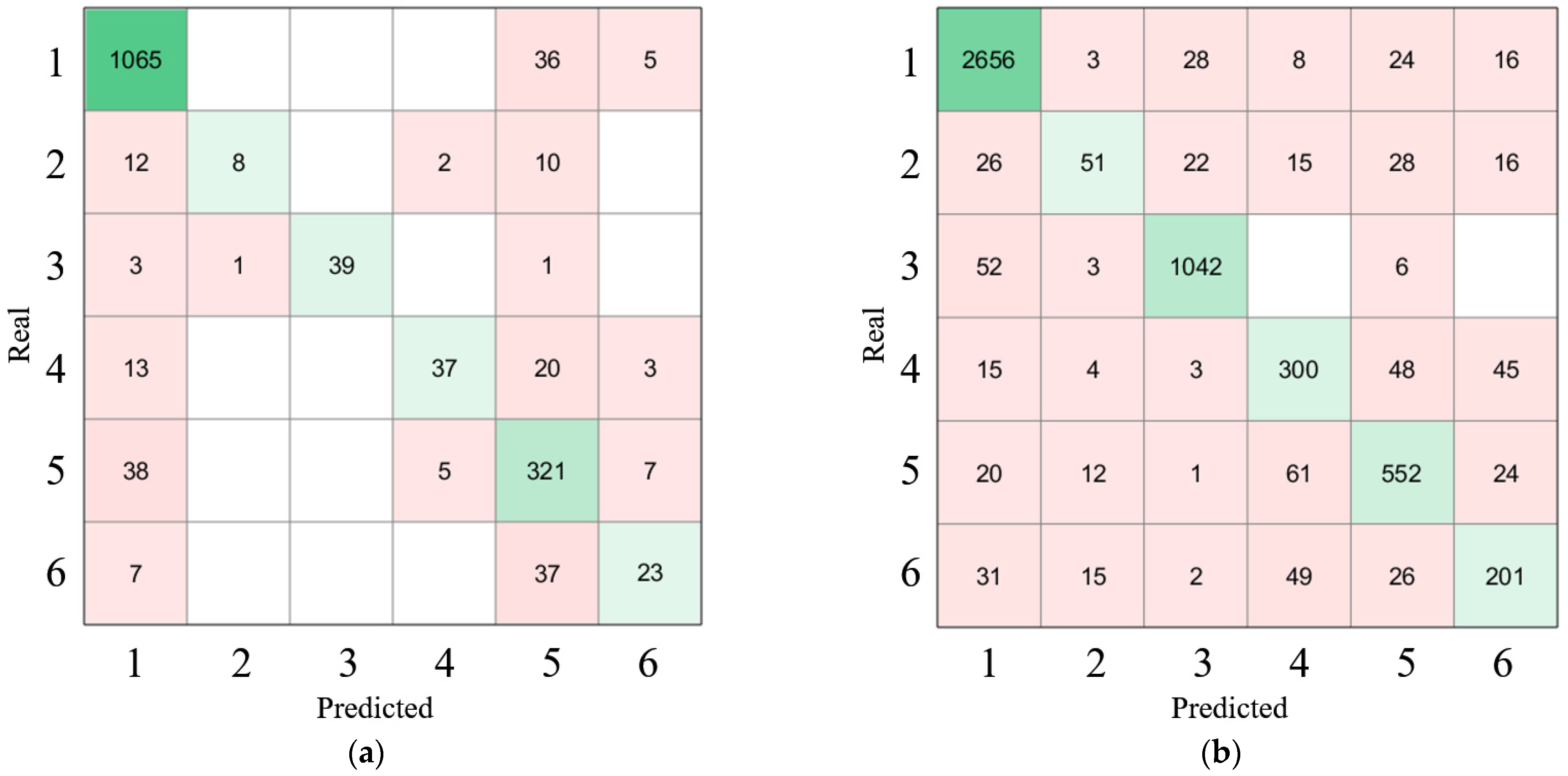
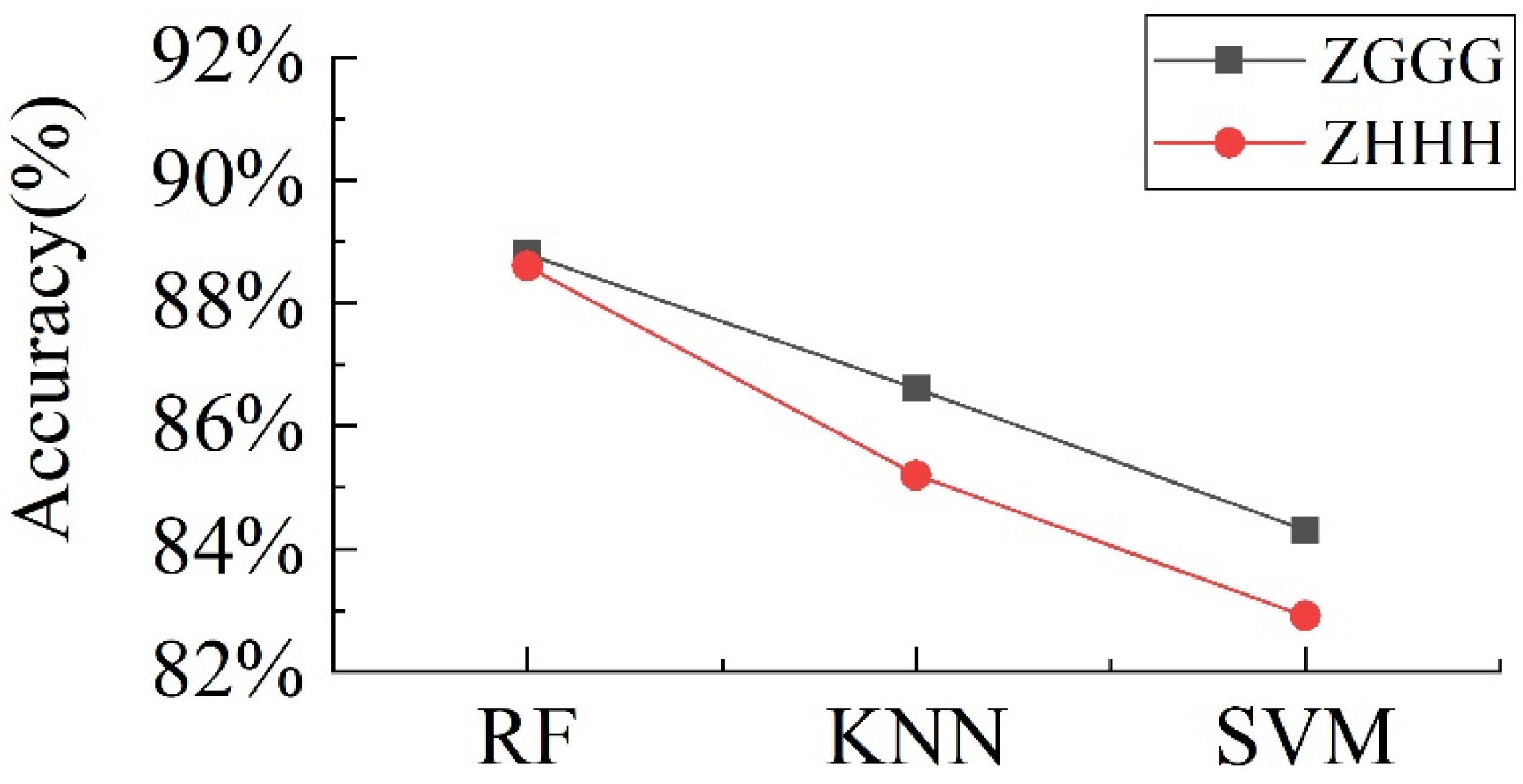
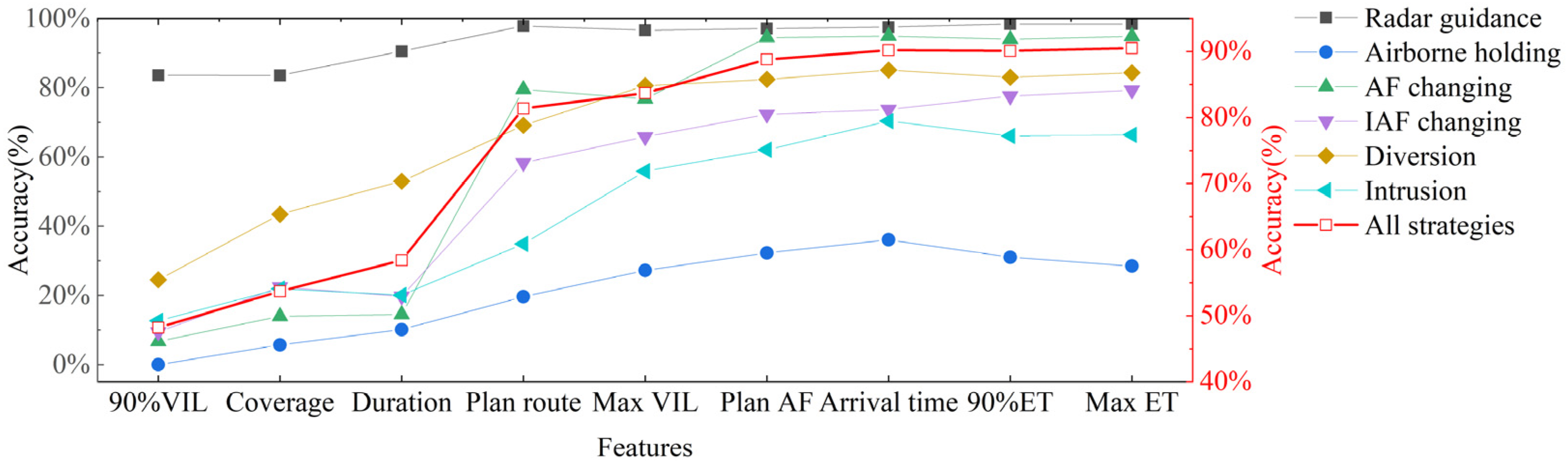
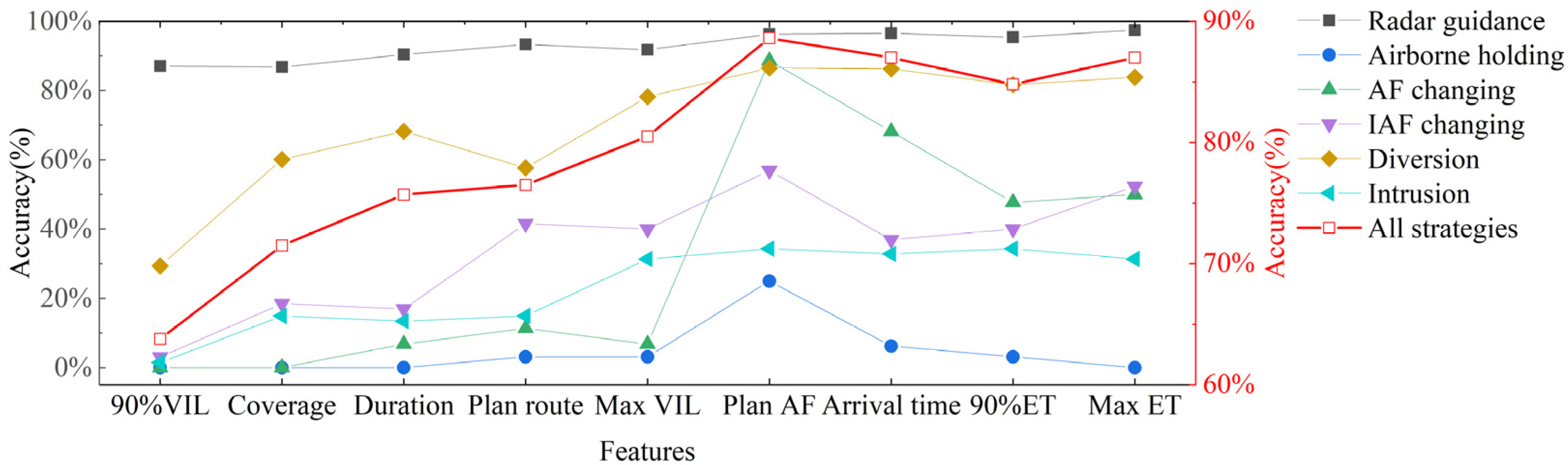
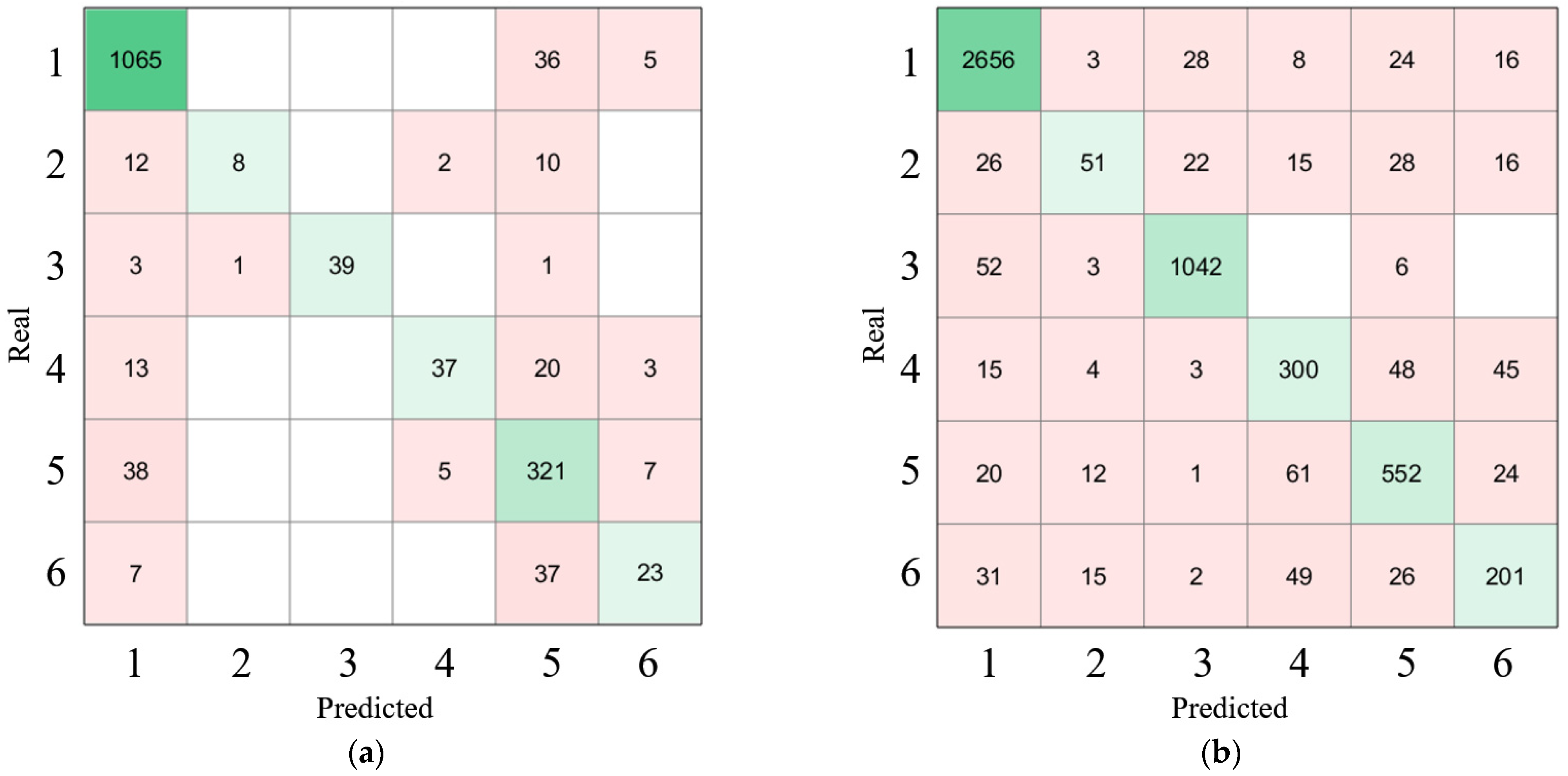
4. Prediction Results of Arrival Flight Operation Strategies
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Civil Aviation Administration of China. Statistical Bulletin on the Development of Civil Aviation Industry of 2019; Development Planning Division: Beijing, China, 2020. [Google Scholar]
- Yang, W.; Garcia-Rivera, J.; Petty, M.; Layne, G.; Jiang, L. Quantifying Convective Weather Impacts to Airspace Capacity: Framework and Preliminary Results. Air Transp. 2021, 29, 42–55. [Google Scholar] [CrossRef]
- Civil Aviation Administration of China. Statistical Bulletin on the Development of Civil Aviation Industry of 2020; Development Planning Division: Beijing, China, 2021. [Google Scholar]
- Eckstein, A. Automated Flight Trajectory Taxonomy for Measuring Benefits from Performance based Navigation. In Proceedings of the 2009 Integrated Communications, Navigation, Surveillance Conference (ICNS), Crystal City, VA, USA, 13–15 May 2009; pp. 1–12. [Google Scholar]
- Sabhnani, G.; Yousefi, A.; Kostitsyna, I.; Mitchell, J.; Polishchuk, V.; Kierstead, D. Algorithmic Traffic Abstraction and Its Application to NextGen Generic Airspace. In Proceedings of the 10th AIAA Aviation Technology, Integration, and Operations Conference, Fort Worth, TX, USA, 13–15 September 2010; p. 9335. [Google Scholar]
- Barratt, S.; Kochenderfer, M.; Boyd, S. Learning Probabilistic Trajectory Models of Aircraft in Terminal Airspace from Position Data. IEEE Trans. Intell. Transp. Syst. 2018, 20, 3536–3545. [Google Scholar] [CrossRef] [Green Version]
- Xu, T.; Li, Y.; Lv, Z. Research on Flight Tracks Clustering based on the Vertical Distance of Trajectory Points. Syst. Eng. Electron. 2015, 37, 2198–2204. [Google Scholar]
- Mcfadyen, A.; Martin, T.; O’Flynn, M.; Duncan, C. Aircraft Trajectory Clustering Techniques Using Circular Statistics. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–10. [Google Scholar]
- Murca, M.; Delaura, R.; Hansman, R.; Jordan, R.; Reynolds, T.; Balakrishnan, H. Trajectory Clustering and Classification for Characterization of Air Traffic Flows. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016; p. 3760. [Google Scholar]
- Murca, M.; John, H. Identification, Characterization, and Prediction of Traffic Flow Patterns in Multi-Airport Systems. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1683–1696. [Google Scholar] [CrossRef]
- Basora, L.; Morio, J.; Mailhot, C. A Trajectory Clustering Framework to Analyse Air Traffic Flows. In Proceedings of the 7th SESAR Innovation Days, Belgrade, Serbia, 28–30 November 2017. [Google Scholar]
- Corrado, S.; Puranik, T.; Pinon, O.; Mavris, D. Trajectory Clustering within the Terminal Airspace Utilizing a Weighted Distance Function. Multidiscip. Digit. Publ. Inst. Proc. 2020, 59, 7. [Google Scholar]
- Gallego, C.; Comendador, V.; Nieto, F.; Martinez, M. Discussion on Density-Based Clustering Methods Applied for Automated Identification of Airspace Flows. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference, London, UK, 23–27 September 2018; pp. 1–10. [Google Scholar]
- Gariel, M.; Srivastava, A.; Feron, E. Trajectory Clustering and an Application to Airspace Monitoring. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1511–1524. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Peng, B. Trajectory Clustering based on LOFC Time Window Segmentation Algorithm. J. Nanjing Univ. Aeronaut. Astronaut. 2018, 50, 661–665. [Google Scholar]
- Matthews, M.; Delaura, R. Evaluation of enroute convective weather avoidance models based on planned and observed flights. In Proceedings of the 14th Conference on Aviation, Range, and Aerospace Meteorology, Atlanta, GA, USA, 16–21 January 2010. 1.1. [Google Scholar]
- Matthews, M.; Campbell, S.; Delaura, R. Evaluation of Convective Weather Avoidance Models for the Terminal Area. In Proceedings of the Third Aviation, Range and Aerospace Meteorology Special Symposium on Weather-Air Traffic Management Integration, New Orleans, LA, USA, 22–26 January 2012; p. 537. [Google Scholar]
- Rubnich, M.; Delaura, R. Initial validation of a Convective Weather Avoidance Model (CWAM) in departure airspace. In Proceedings of the 2011 IEEE/AIAA 30th Digital Avionics Systems Conference, Seattle, WA, USA, 16–20 October 2011; pp. 3A2-1–3A2-7. [Google Scholar]
- Campbell, S.; Matthews, M.; Delaura, R. Evaluation of the Convective Weather Avoidance Model for Arrival Traffic. In Proceedings of the 12th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference and 14th AIAA/ISSMO, Indianapolis, IA, USA, 17–19 September 2012; p. 5500. [Google Scholar]
- Campbell, S.; Matthews, M.; Delaura, R. Air Traffic Decision Analysis During Convective Weather Events in Arrival Airspace. In Proceedings of the 12th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference and 14th AIAA/ISSMO, Indianapolis, IA, USA, 17–19 September 2012; p. 5502. [Google Scholar]
- Mukherjee, A.; Grabbe, S.; Sridhar, B. Classification of Days Using Weather Impacted Traffic in the National Airspace System. In Proceedings of the 2013 Aviation Technology, Integration, and Operations Conference, Los Angeles, CA, USA, 12–14 August 2013; p. 4403. [Google Scholar]
- Stewart, T.; Dearmon, J.; Chaloux, D. Using Flight Information to Improve Weather Avoidance Predictions. In Proceedings of the 2013 Aviation Technology, Integration, and Operations Conference, Los Angeles, CA, USA, 12–14 August 2013; p. 4377. [Google Scholar]
- Yi-Hsin, L.; Balakrishnan, H. Prediction of Terminal-Area Weather Penetration on the Basis of Operational Factors. Trans. Res. Rec. J. Trans. Res. Board. 2013, 2400, 45–53. [Google Scholar]
- Michael, M. Modeling Convective Weather Avoidance of Arrivals in Terminal Airspace. In Proceedings of the 91st USA Meteorological Society Annual Meeting, Seattle, WA, USA, 22–27 January 2011; p. 326. [Google Scholar]
- Delaura, R.; Robinson, M.; Pawlak, M.; Evans, J. Modeling convective weather avoidance in enroute airspace. In Proceedings of the 13th Conference on Aviation, Range, and Aerospace Meteorology, New Orleans, LA, USA, 20–24 January 2008. P1.12. [Google Scholar]
- Rubnich, M.; Delaura, R. An Algorithm to Identify Robust Convective Weather Avoidance Polygons in En Route Airspace. In Proceedings of the 10th AIAA Aviation Technology, Integration, and Operations Conference, Fort Worth, TX, USA, 13–15 September 2010; p. 9164. [Google Scholar]
- Post, J.; Bennett, M.; Bonn, J.; Knor, D. Estimation of En Route Weather Severity Index Using Lightning Strike and Flight Plan Data. In Proceedings of the 47th Annual Air Traffic Control Association Conference Proceedings, Washington, DC, USA, 3–7 November 2002. [Google Scholar]
- Klein, A.; Craun, C.; Lee, R. Airport Delay Prediction Using Weather Impacted Traffic Index (WITI) Model. In Proceedings of the 29th Digital Avionics Systems Conference, Salt Lake City, UT, USA, 3–7 October 2010; pp. 2.B.1-1–2.B.1-13. [Google Scholar]
- Wang, K.; Li, J.; Tian, Y. Airport Delay Prediction Method Based on Improved Weather Impacted Traffic Index. In Proceedings of the 2019 IEEE 1st International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Kunming, China, 17–19 October 2019; pp. 73–78. [Google Scholar]
- Klein, A.; Macphail, T.; Davoussi, S.; Hickman, D.; Phaneuf, M. NAS Weather Index: Quantifying Impact of Actual and Forecast En-route and Surface Weather on Air Traffic. In Proceedings of the 89th American Meteorological Society Annual Meeting, Phoenix, AZ, USA, 11–15 January 2009. PD 1.1. [Google Scholar]
- Krozel, J.; Mitchell, J.; Polishchuk, V.; Prete, J. Capacity Estimation for Airspaces with Convective Weather Constraints. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; p. 6451. [Google Scholar]
- Zhang, Z.; Wei, Z. Assessment of terminal airspace dynamic capacity considering dangerous weather. J. Civil Avia. Uni. China. 2013, 31, 5–11. [Google Scholar]
- Klein, A.; Cook, L.; Wood, B. Directional Demand, Capacity and Queuing Delay in En-Route Airspace. In Proceedings of the 9th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, Hilton Head, SC, USA, 21–23 September 2009; p. 6963. [Google Scholar]
- Matthews, M.; Delaura, R.; Venuti, J. Strategic Forecasts of TRACON Airspace Capacity during Convective Weather Impacts. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017; p. 343. [Google Scholar]
- Mao, L.; Peng, Y.; Li, J. Random-forest based terminal capacity prediction under convective weather. Syst. Engin. Theo. Prac. 2021, 41, 12. [Google Scholar]
- Taylor, C.; Wanke, C. Dynamic Generation of Operationally Acceptable Reroutes. In Proceedings of the 9th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, Hilton Head, SC, USA, 21–23 September 2009; p. 7091. [Google Scholar]
- Xie, Z.; Zhong, Z. Aircraft Path Planning under Adverse Weather Conditions. In Proceedings of the 2016 3rd International Conference on Mechanics and Mechatronics Research, Chongqing, China, 15–17 June 2016; p. 15001. [Google Scholar]
- Mao, L.; Peng, Y.; Jia, Z. Tactical Rerouting in Severe Weather. J. East China Jiaotong Univ. 2020, 37, 72–80. [Google Scholar]
- Ayo, B. An Improved Genetic Algorithm for Flight Path Re-Routes with Reduced Passenger Impact. J. Comp. Commun. 2017, 5, 65–75. [Google Scholar] [CrossRef] [Green Version]
- Chaimatanan, S.; Delahaye, D.; Mongeau, M. A Methodology for Strategic Planning of Aircraft Trajectories Using Simulated Annealing. In Proceedings of the 1st International Conference on Interdisciplinary Science for Air traffic Management, Daytona Beach, FL, USA, 25 June 2012. [Google Scholar]
- Pang, Y.; Liu, Y. Conditional Generative Adversarial Networks (CGAN) for Aircraft Trajectory Prediction considering weather effects. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 1853. [Google Scholar]
- Antony, D.; Paul, U. Using Machine-Learning to Dynamically Generate Operationally Acceptable Strategic Reroute Options. In Proceedings of the Thirteenth USA/Europe Air Traffic Management Research and Development Seminar (ATM2019), Vienna, Austria, 17–21 June 2019; p. 25. [Google Scholar]
- Rhoda, D.; Pawlak, M. An Assessment of Thunderstorm Penetrations and Deviations by Commercial Aircraft in the Terminal Area: NASA/A-2; MIT Lincoln Laboratory Tech: Lexington, MA, USA, 1999. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NWS Level | VIL (kg/m2) | ET (ft) | Type |
|---|---|---|---|
| 0 | <0.14 | <25,000 | None |
| 1 | 0.14–0.7 | Light mist | |
| 2 | 0.7–3.5 | Moderate | |
| 3 | 3.5–6.9 | 25,000–35,000 | Heavy |
| 4 | 6.9–12 | Very heavy | |
| 5 | 12–32 | ≥35,000 | Intense |
| 6 | ≥32 | Extreme |
| Feature | Meaning |
|---|---|
| 90%VIL | The 90th percentile value of VIL within the planned typical flight route |
| Coverage | The proportion of the area with the value of VIL in NWS class 3 and above within the planned typical flight route |
| Duration | The duration that the proportion of the area with the value of VIL in NWS class 3 and above within the planned typical flight route is 10% and above |
| Plan route | The planned typical flight route |
| Max VIL | The maximum percentile value of VIL within the planned typical flight route |
| Plan AF | The flight plan AF |
| Arrival time | The planned time when the flight arrives at the terminal area boundary |
| 90%ET | The 90th percentile value of ET within the planned typical flight route |
| Max ET | The maximum percentile value of ET within the planned typical flight route |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Chu, J.; Li, J.; Duan, R. Prediction of Arrival Flight Operation Strategies under Convective Weather Based on Trajectory Clustering. Aerospace 2022, 9, 189. https://doi.org/10.3390/aerospace9040189
Wang S, Chu J, Li J, Duan R. Prediction of Arrival Flight Operation Strategies under Convective Weather Based on Trajectory Clustering. Aerospace. 2022; 9(4):189. https://doi.org/10.3390/aerospace9040189
Chicago/Turabian StyleWang, Shijin, Jiewen Chu, Jiahao Li, and Rongrong Duan. 2022. "Prediction of Arrival Flight Operation Strategies under Convective Weather Based on Trajectory Clustering" Aerospace 9, no. 4: 189. https://doi.org/10.3390/aerospace9040189
APA StyleWang, S., Chu, J., Li, J., & Duan, R. (2022). Prediction of Arrival Flight Operation Strategies under Convective Weather Based on Trajectory Clustering. Aerospace, 9(4), 189. https://doi.org/10.3390/aerospace9040189