Integrated Design and Implementation of Embedded Control Systems with Scilab

Abstract
:1. Introduction
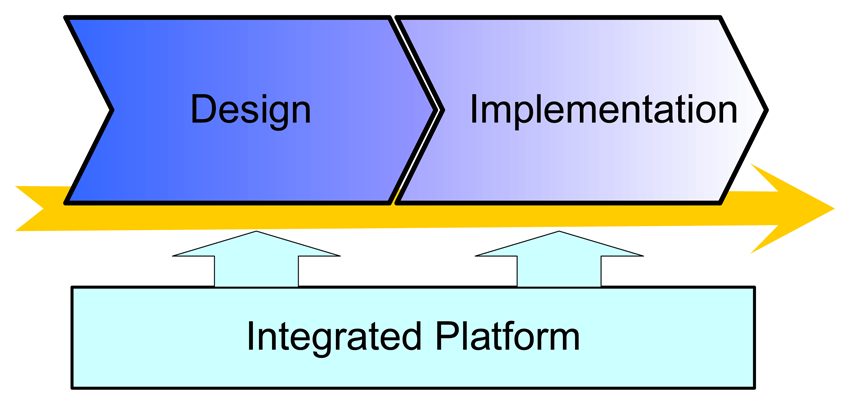
- It enables developers to perform all phases of the development cycle of control systems within a unified environment, thus facilitating rapid development of embedded control software. This has the potential of improving the performance of the resulting system.
- It makes possible to implement complex control strategies on embedded platforms, for example, robust control, model predictive control, optimal control, and online system optimization. With this capability, the embedded platform can be used to control complex physical processes.
- It significantly reduces system development cost thanks to the use of free and open source software packages. Both Scilab and Linux can be freely downloaded from the Internet, thus minimizing the cost of software.
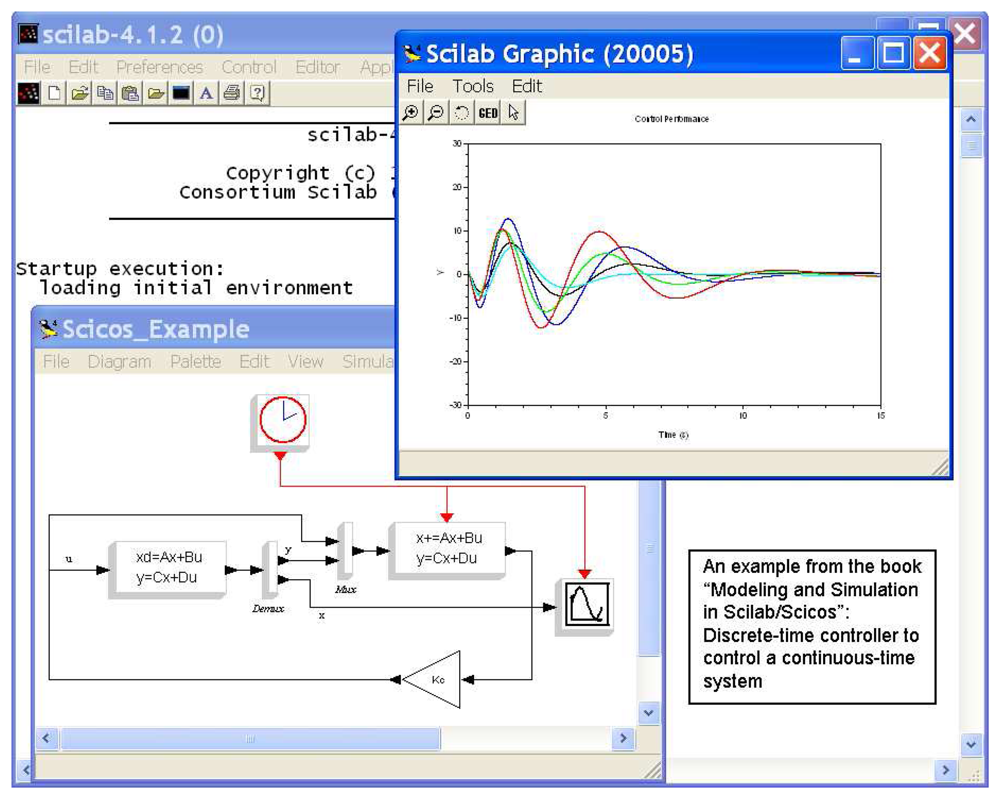
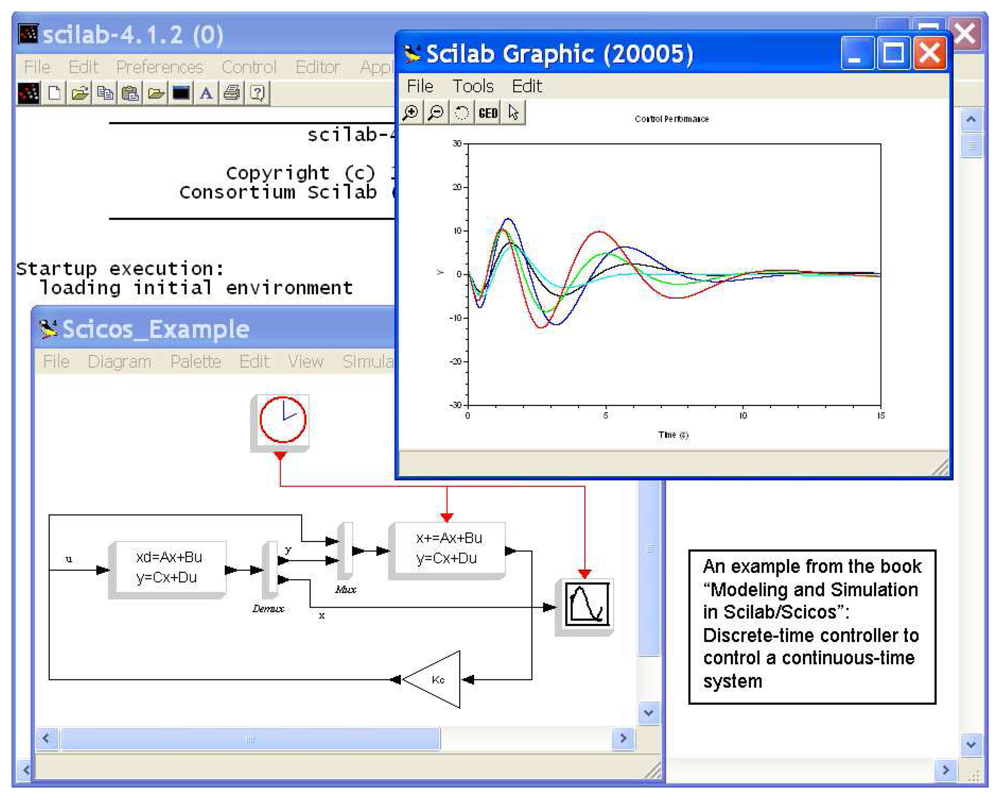
2. The Scilab/Scicos Environment
3. Embedded Control Systems Design
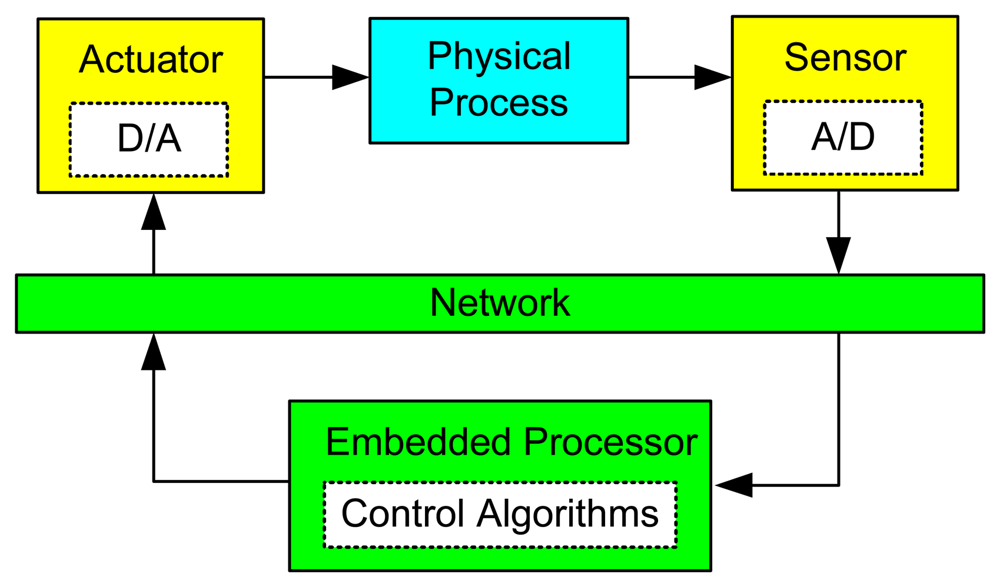
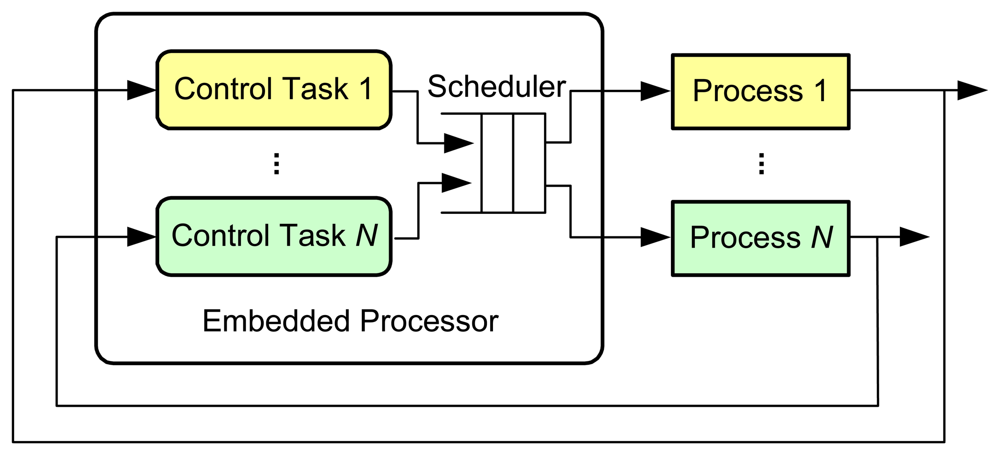
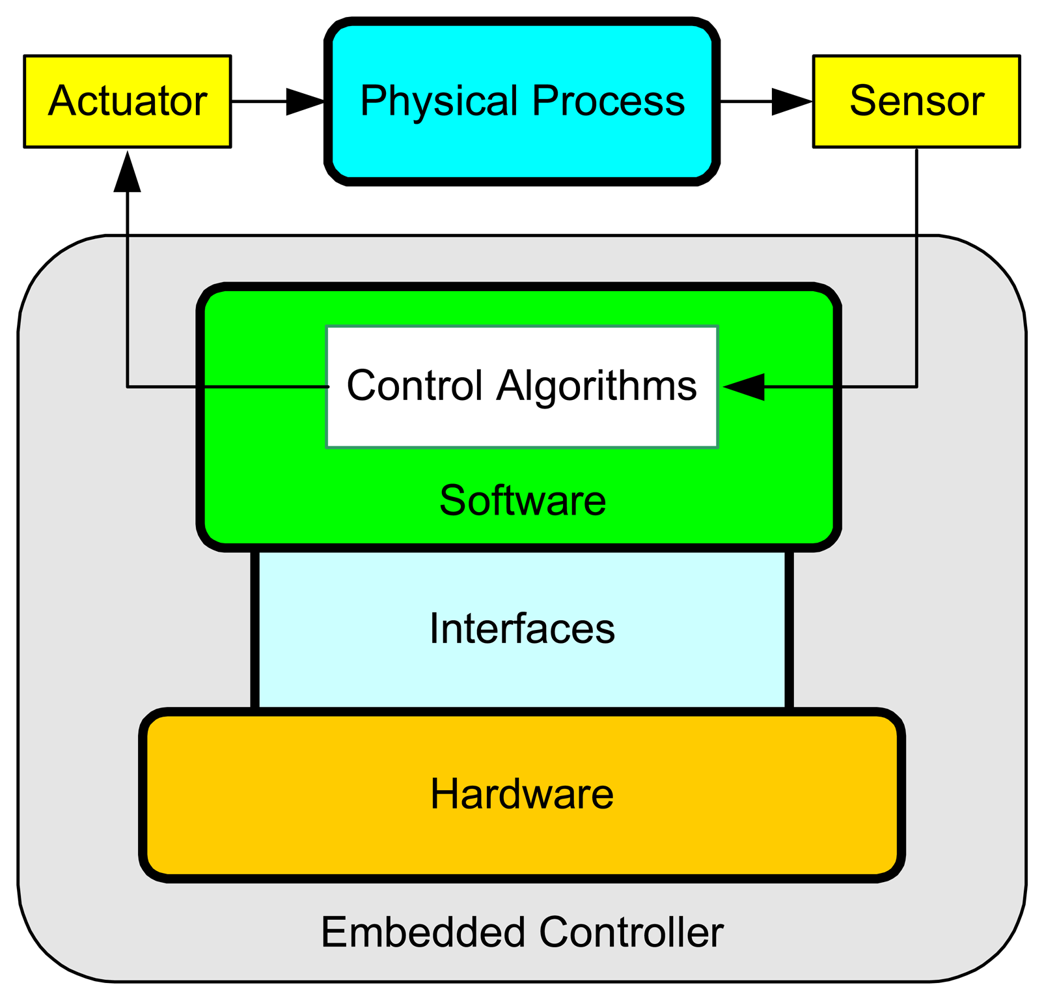
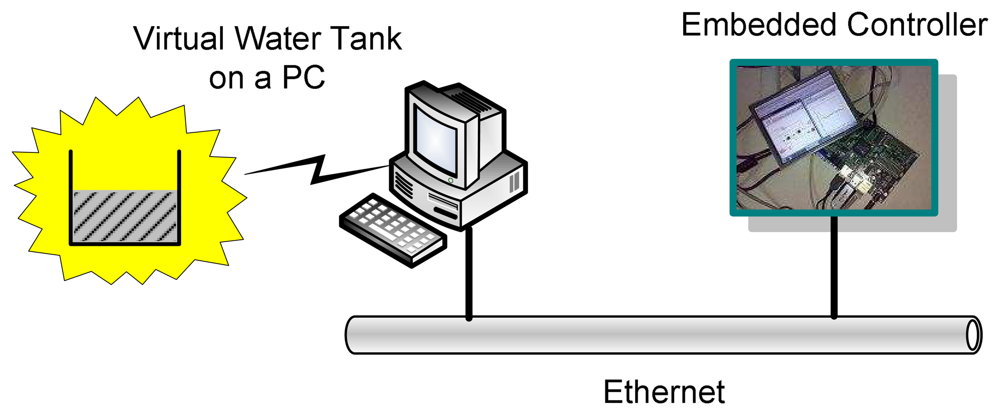
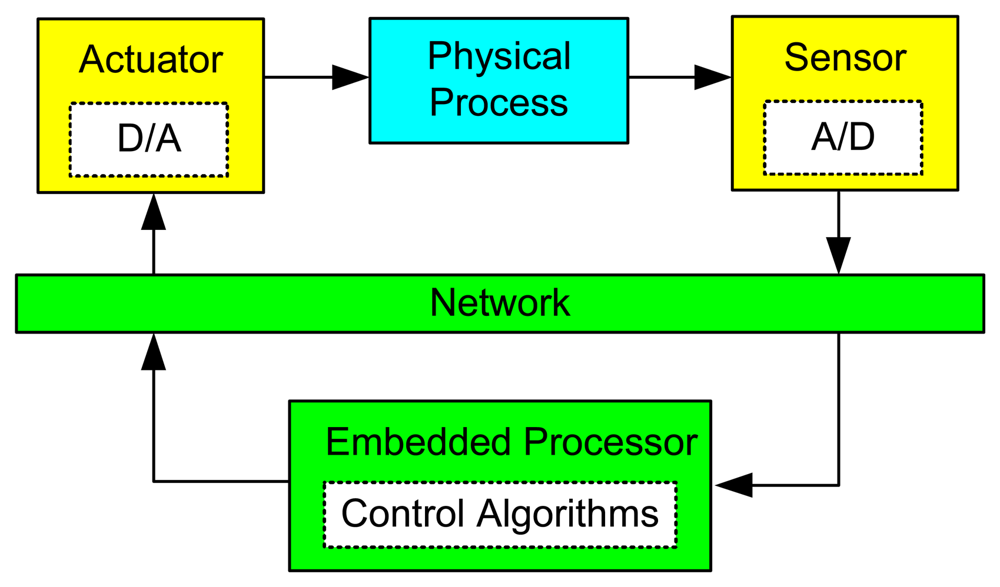
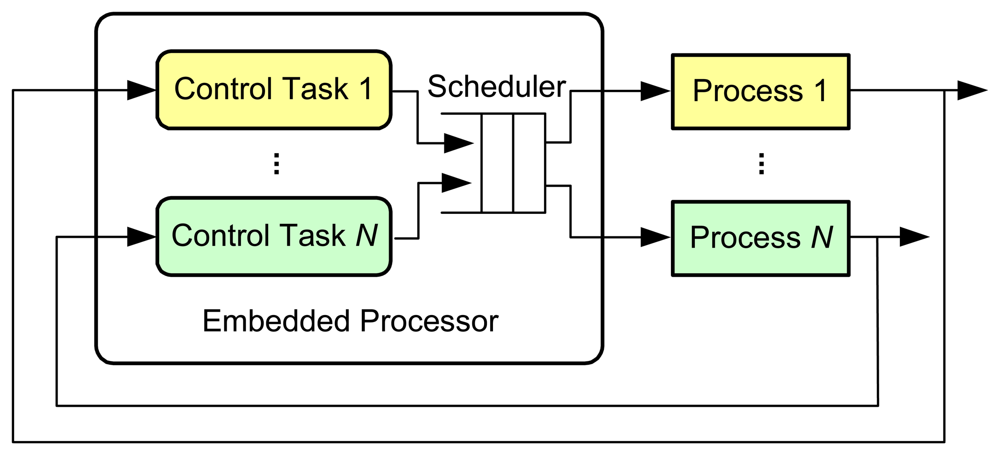
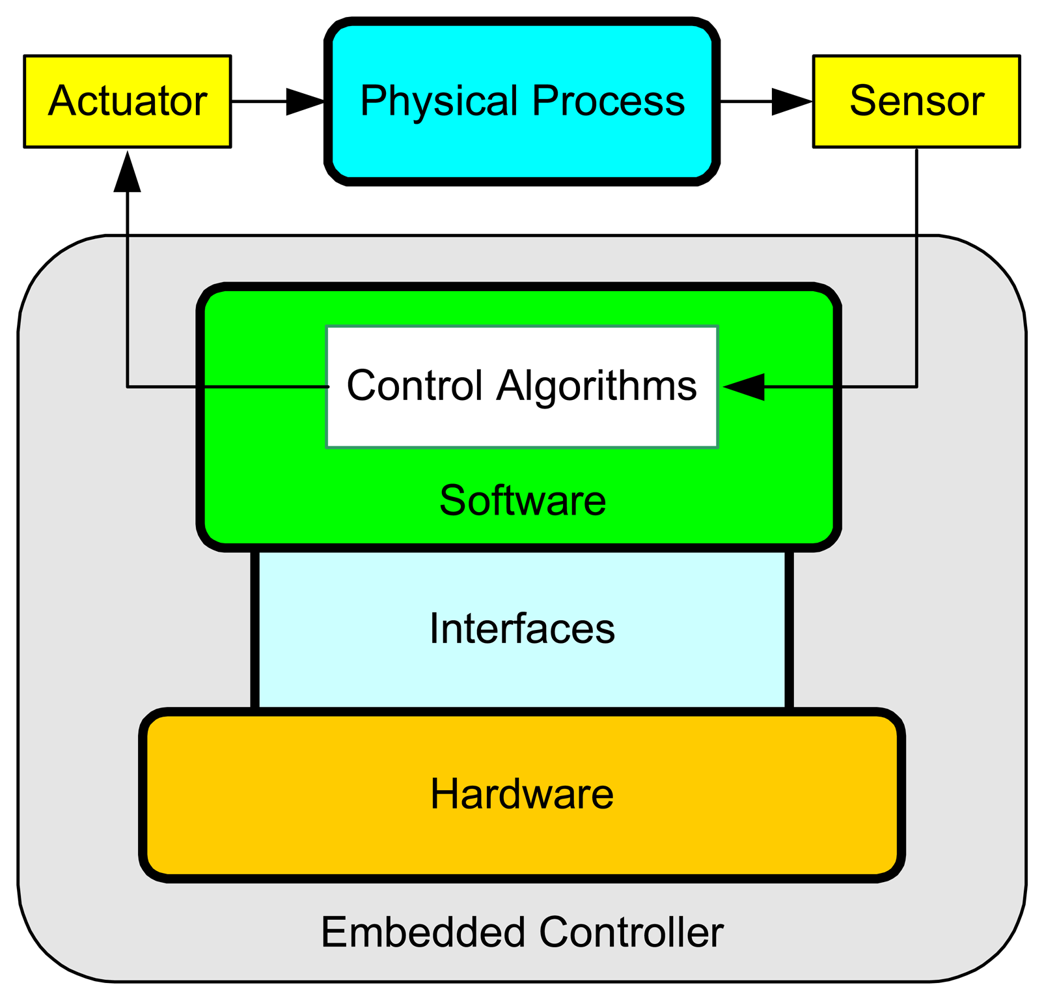
3.1. Architecture
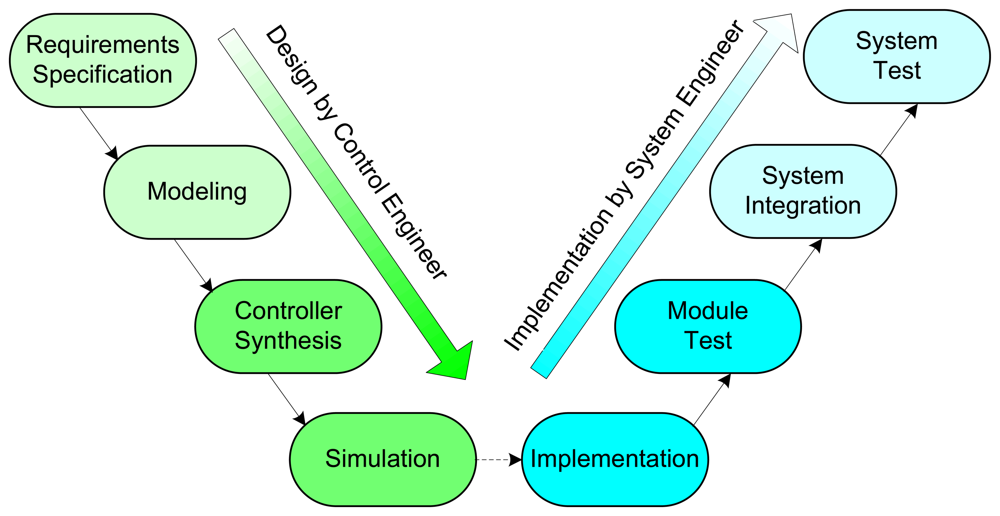
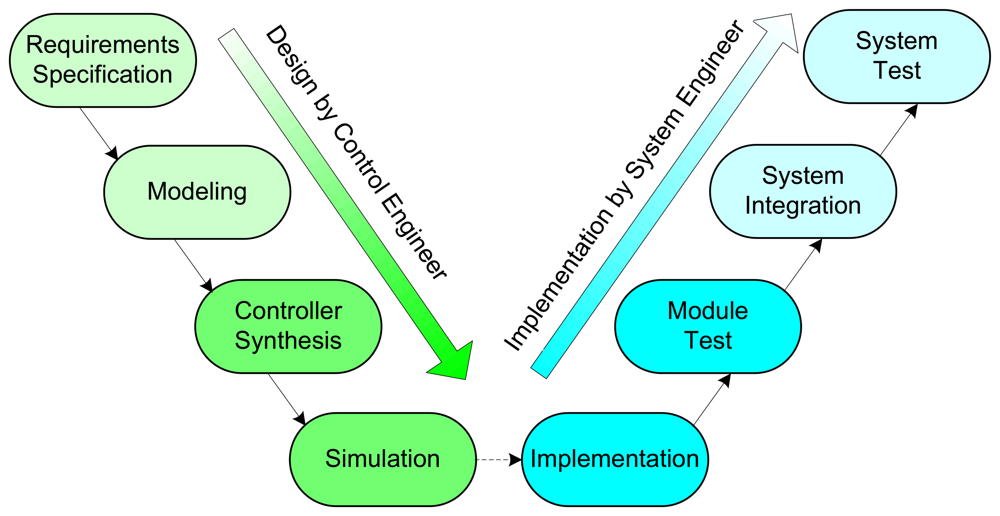
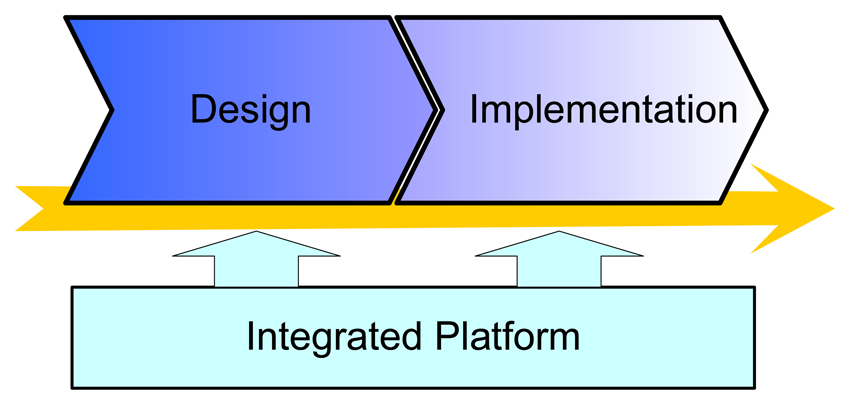
3.2. Design Methodology
4. Platform Implementation
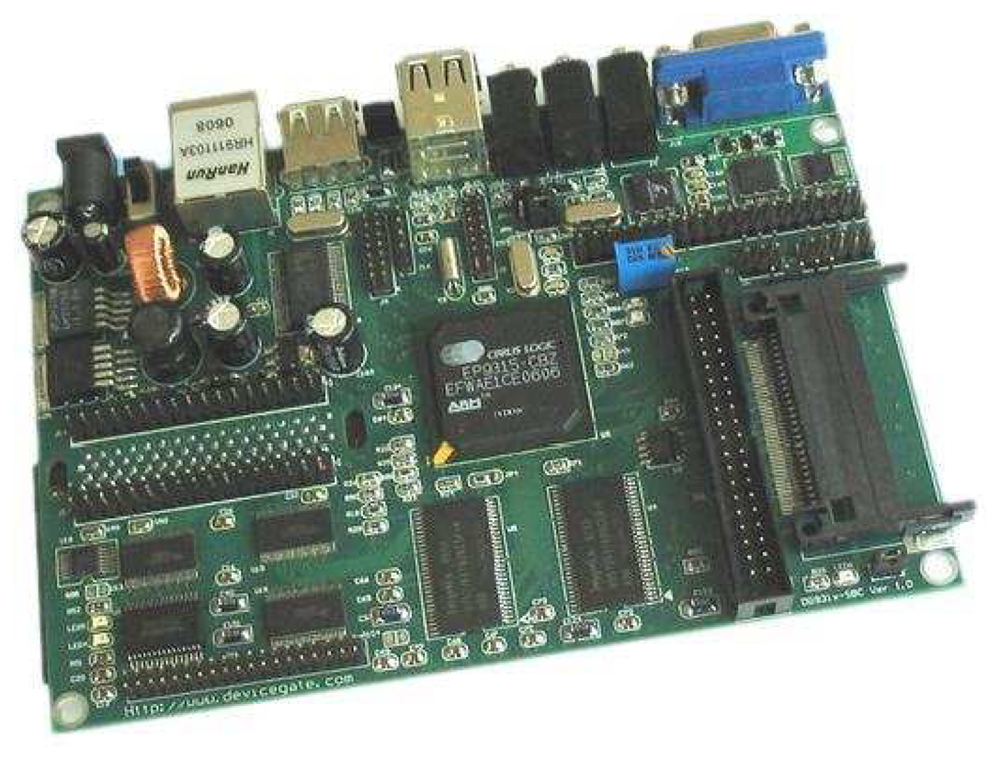
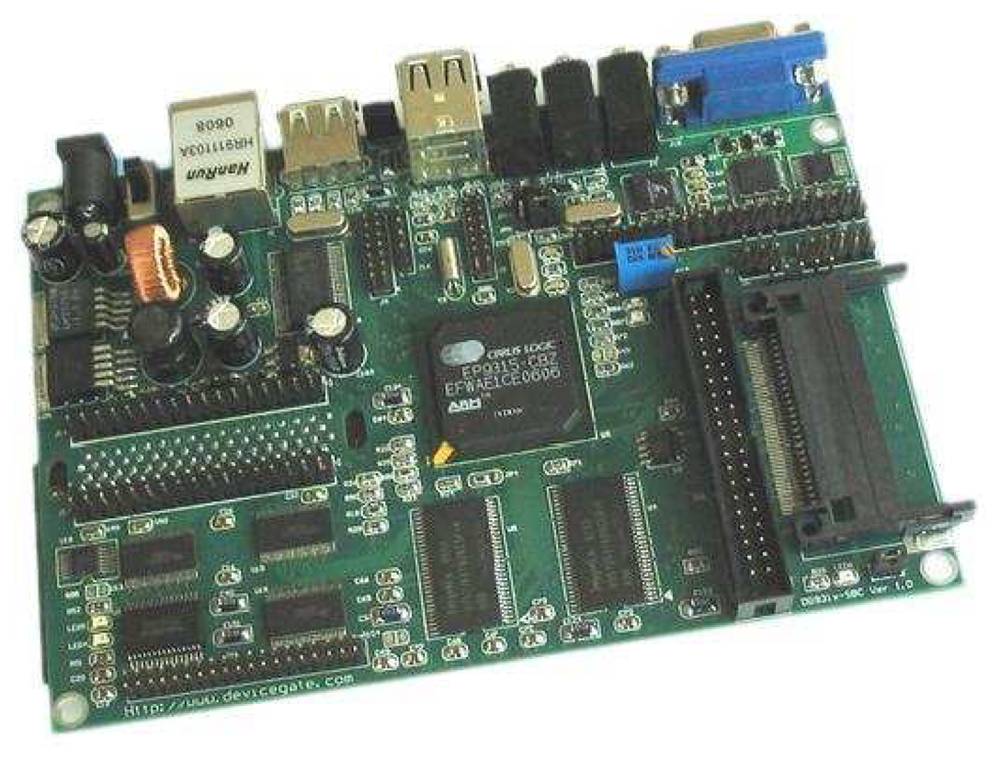
4.1. Hardware
4.2. Software
4.2.1. Embedding Scilab
- Port Linux to the ARM platform;
- Port TinyX to ARM-Linux;
- Port JWM to ARM-Linux;
- Port Scilab/Scicos to ARM-Linux;
- Configure and optimize the embedded Scilab/Scicos.
- The configure file: on Line 5900, insertint main (){return 0;}
- The configure file: on Lines 31696 and 31725, delete{ ( exit 1) ; exit 1; } ;
- / scilab/ routines/ xsci/ wf_f_util. c: change Line 76 toextern char *getcwd();
- / scilab/ routines/ xsci/ x_misc. c: insertint sys_nerr;char *sys_errlist [ ] ;
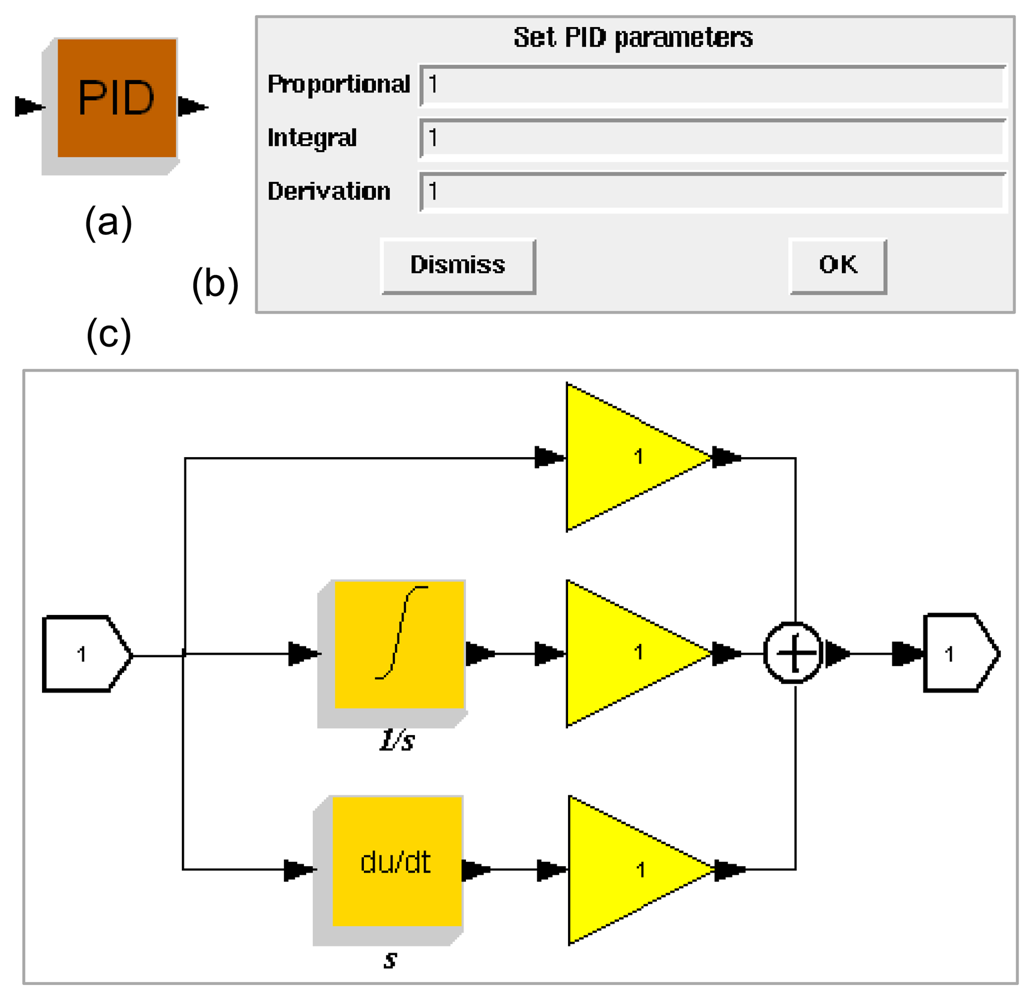
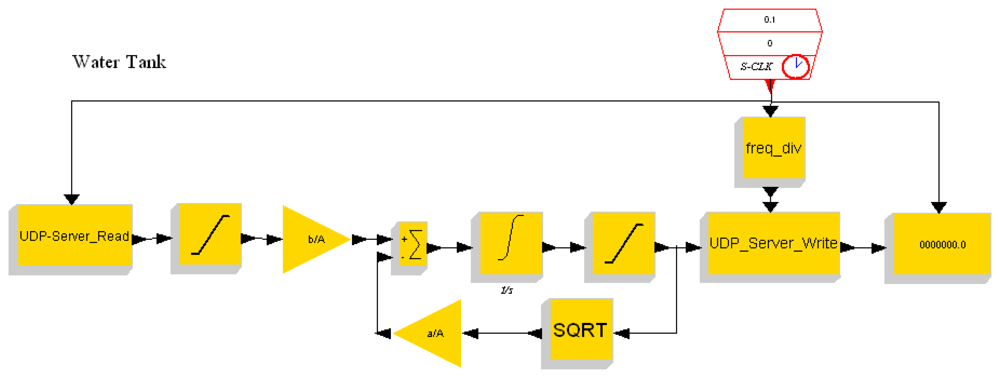
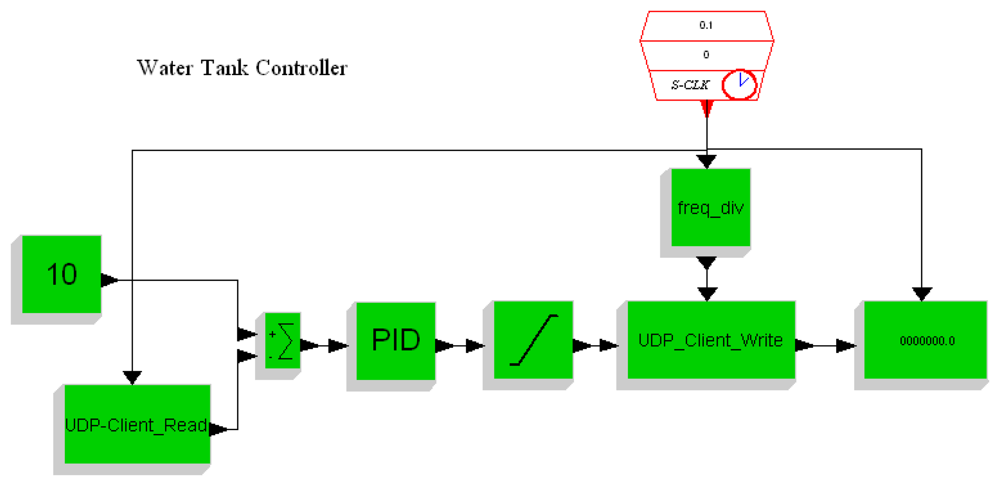
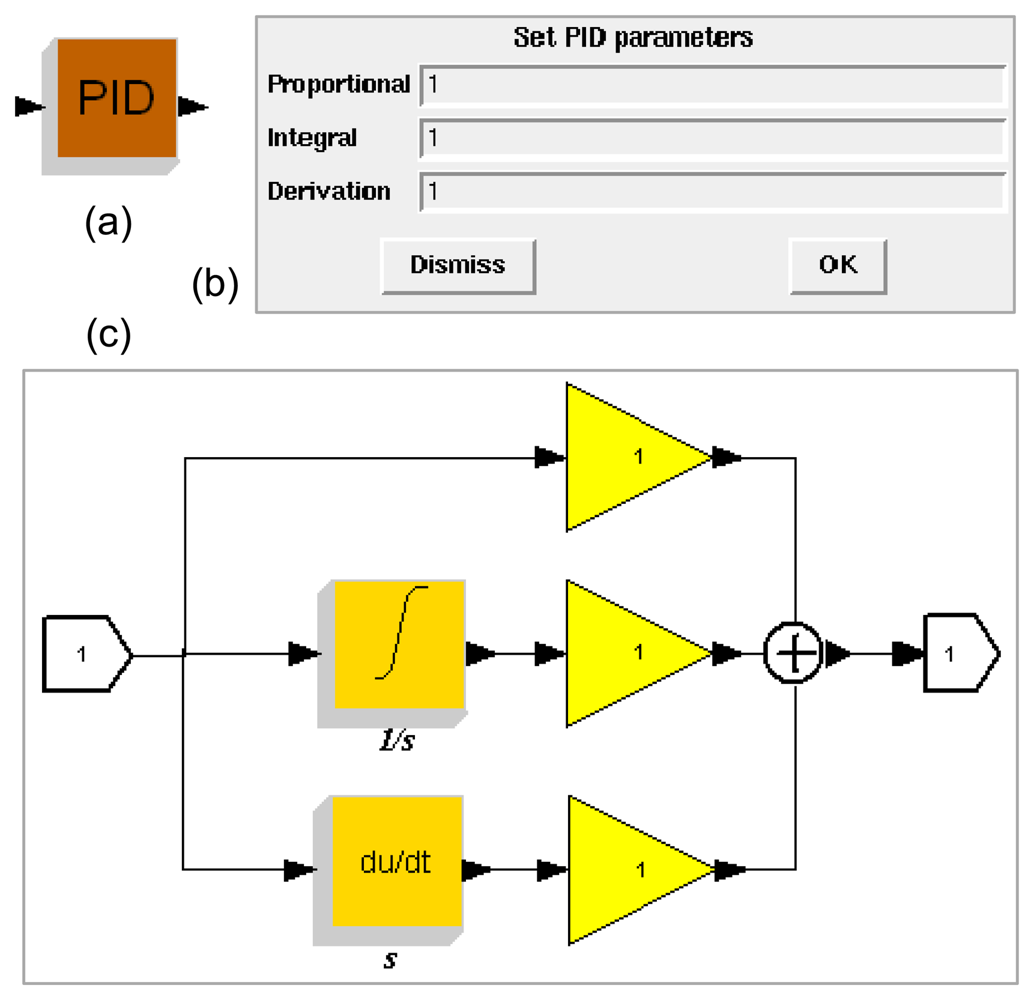
4.2.2. Building Control Software in Scilab
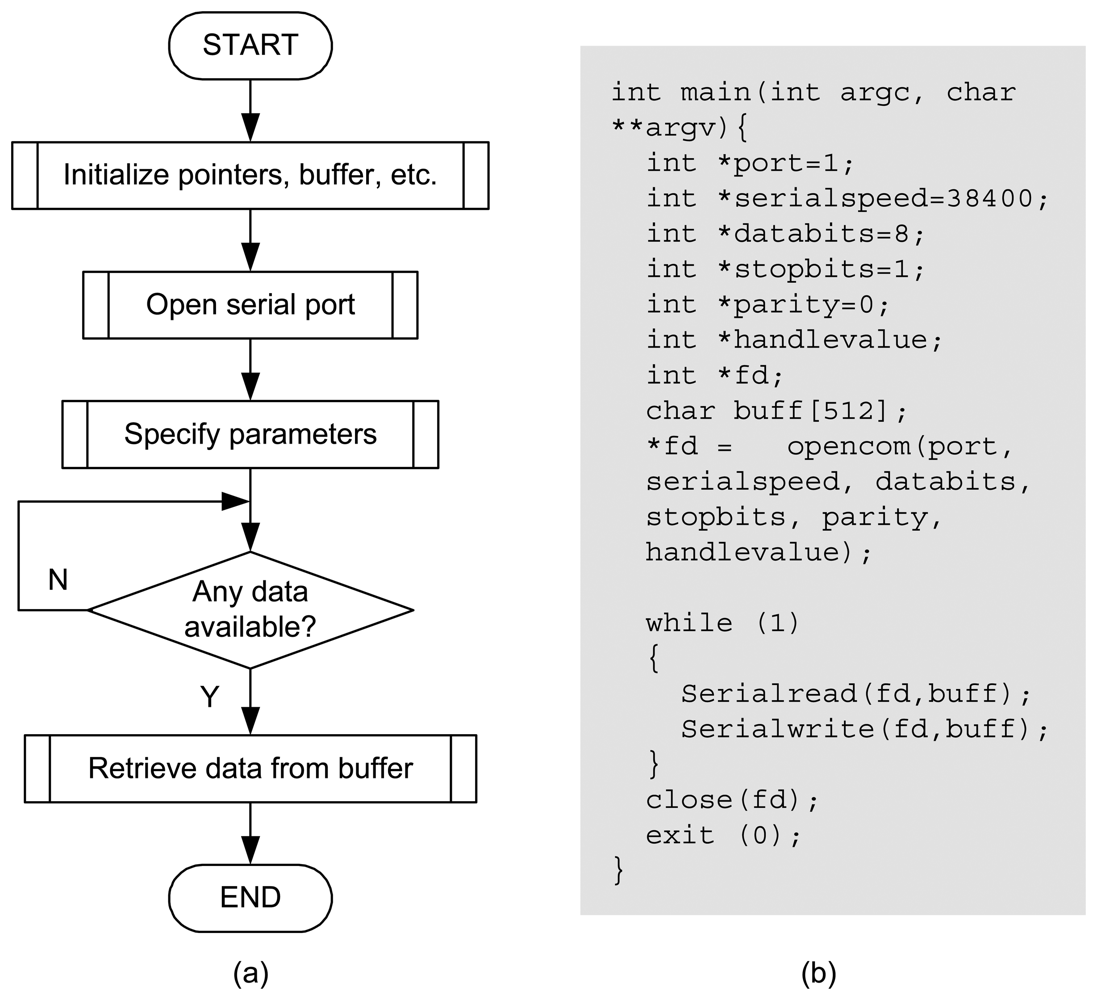
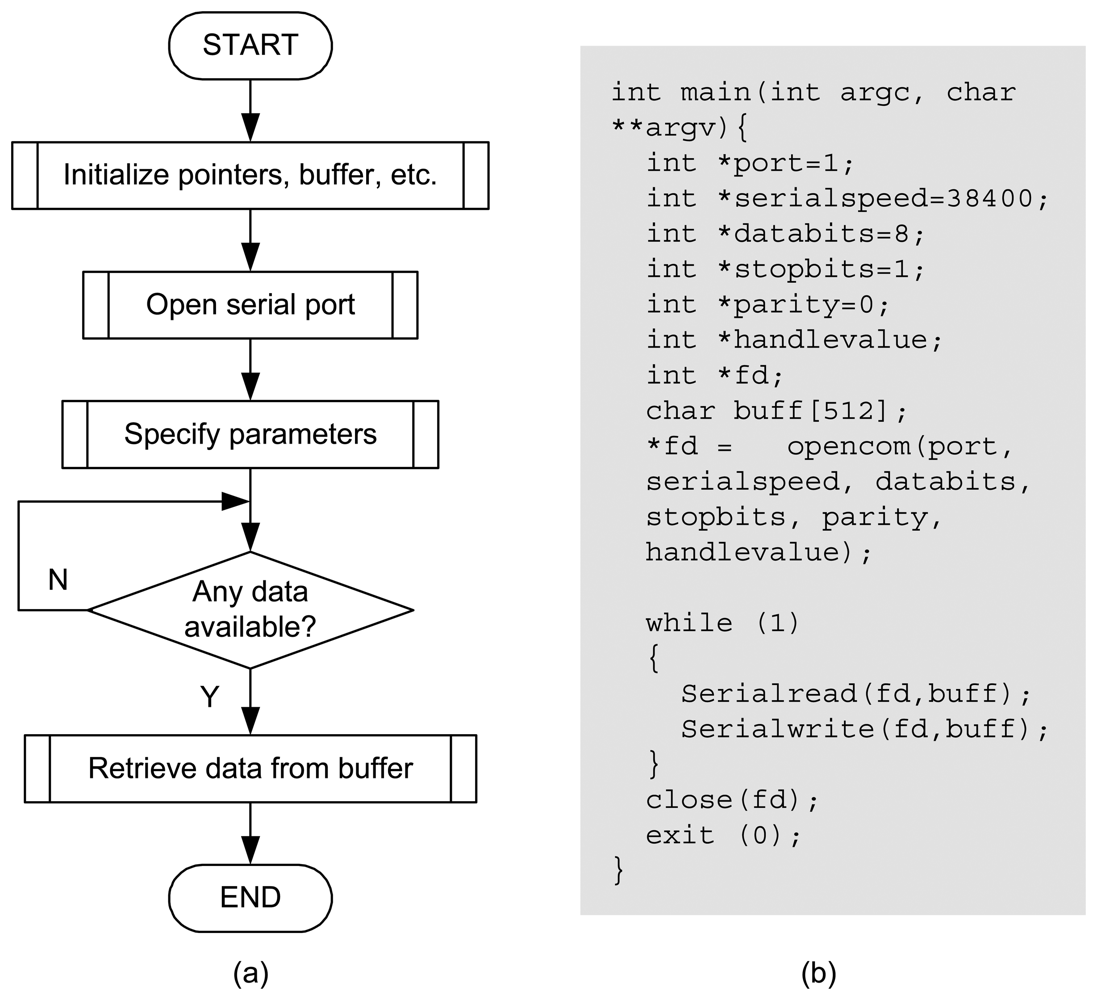
4.3. Interfaces
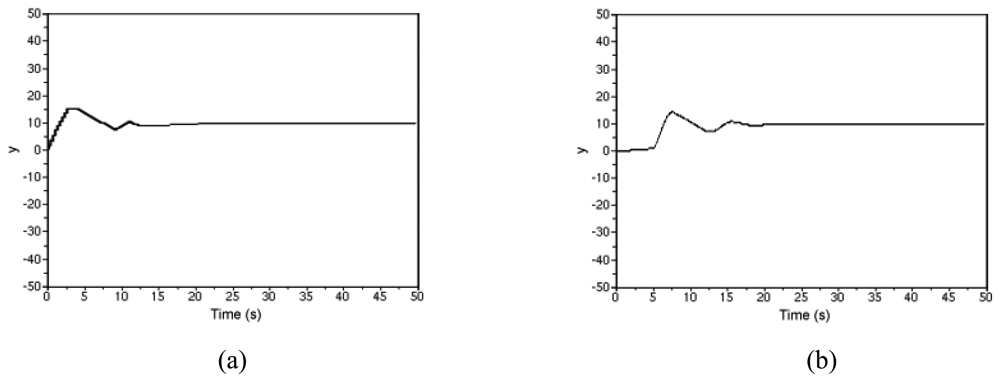
5. Experimental Test
6. Conclusions
Acknowledgments
References and Notes
- Embedded Systems Glossary. http://www.netrino.com/Embedded-Systems/Glossary.
- Wittenmark, B.; Åström, K.J.; Årzén, K.-E. Computer control: An overview; IFAC Professional Brief, 2002. [Google Scholar]
- Xia, F.; Sun, Y.X. Control and Scheduling Codesign: Flexible Resource Management in Real-Time Control Systems; Springer: Heidelberg, Germany, 2008. [Google Scholar]
- Årzén, K.-E.; Bernhardsson, B.; Eker, J.; Cervin, A.; Persson, P.; Nilsson, K.; Sha, L. Integrated Control and Scheduling, Research Report.; Dept. Automatic Control, Lund Institute of Technology: Lund, Sweden, 1999. [Google Scholar]
- Albertos, P.; Crespo, A.; Vallés, M.; Ripoll, I. Embedded control systems: some issues and solutions. Proc. of the 16th IFAC World Congress, Prague; 2005; pp. 257–262. [Google Scholar]
- Bucher, R.; Balemi, S. Rapid controller prototyping with Matlab/Simulink and Linux. Control Eng. Pract. 2006, 14, 185–192. [Google Scholar]
- Chindris, G.; Muresan, M. Deploying Simulink Models into System-On-Chip Structures. Proc. of 29th Int. Spring Seminar on Electronics Technology, May 2006.
- Bucher, R.; Balemi, S. Scilab/Scicos and Linux RTAI - a unified approach. Proc. of the IEEE Conf. on Control Applications, Toronto, Canada, August 2005; pp. 1121–1126.
- Hladowski, L.; Cichy, B.; Galkowski, K.; Sulikowski, B.; Rogers, E. SCILAB compatible software for analysis and control of repetitive processes. Proc. of the IEEE Conf. on Computer Aided Control Systems Design, Munich, Germany, October 2006; pp. 3024–3029.
- Ben Gaid, M.; Kocik, R.; Sorel, Y.; Hamouche, R. A methodology for improving software design lifecycle in embedded control systems. Proc. of Design, Automation and Test in Europe (DATE), Munich, Germany, March 2008.
- Mannori, S.; Nikoukhah, R.; Steer, S. Free and Open Source Software for Industrial Process Control Systems. http://www.scicos.org/ScicosHIL/angers2006eng.pdf.
- Campbell, S.; Chancelier, J.; Nikoukhah, R. Modeling and Simulation in Scilab/Scicos; Springer: Heidelberg, Germany, 2005. [Google Scholar]
- Qin, S.Y.; Hu, B.G.; Li, S.; Gomez, C. (Eds.) Scilab Research, Development and Applications; Tsinghua University Press - Springer: Beijing, China, 2005.
- Xia, F.; Tian, G.S.; Sun, Y.X. Feedback Scheduling: An Event-Driven Paradigm. ACM SIGPLAN Notices 2007, 42(12), 7–14. [Google Scholar]
- The EP9315 platform. http://www.cirrus.com.
- Bruzzone, G.; Caccia, M.; Bertone, A.; Ravera, G. Standard Linux for embedded real-time manufacturing control systems. Proc. of the 14th Mediterranean Conf. on Control and Automation (MED'06), Ancona, Italy, June 2006; pp. 1–6.
- Scilab online help [4.1.2]. http://www.scilab.org/product/man.
- Peng, Z. Research and Development of the Embedded Computing Platform Scilab-EMB Based on ARM-Linux. Master Thesis, Zhejiang University, Hangzhou, 2008. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Software | URL |
|---|---|
| Linux | www.linux.org |
| Scilab | www.scilab.org |
| Scicos | www.scicos.org |
| TinyX | www.xfree86.org |
| JWM | www.joewing.net |
© 2008 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the CreativeCommons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Ma, L.; Xia, F.; Peng, Z. Integrated Design and Implementation of Embedded Control Systems with Scilab. Sensors 2008, 8, 5501-5515. https://doi.org/10.3390/s8095501
Ma L, Xia F, Peng Z. Integrated Design and Implementation of Embedded Control Systems with Scilab. Sensors. 2008; 8(9):5501-5515. https://doi.org/10.3390/s8095501
Chicago/Turabian StyleMa, Longhua, Feng Xia, and Zhe Peng. 2008. "Integrated Design and Implementation of Embedded Control Systems with Scilab" Sensors 8, no. 9: 5501-5515. https://doi.org/10.3390/s8095501
APA StyleMa, L., Xia, F., & Peng, Z. (2008). Integrated Design and Implementation of Embedded Control Systems with Scilab. Sensors, 8(9), 5501-5515. https://doi.org/10.3390/s8095501