Minimal-Drift Heading Measurement using a MEMS Gyro for Indoor Mobile Robots

Abstract
:1. Introduction
2. The Performance Characteristics of MEMS Gyros
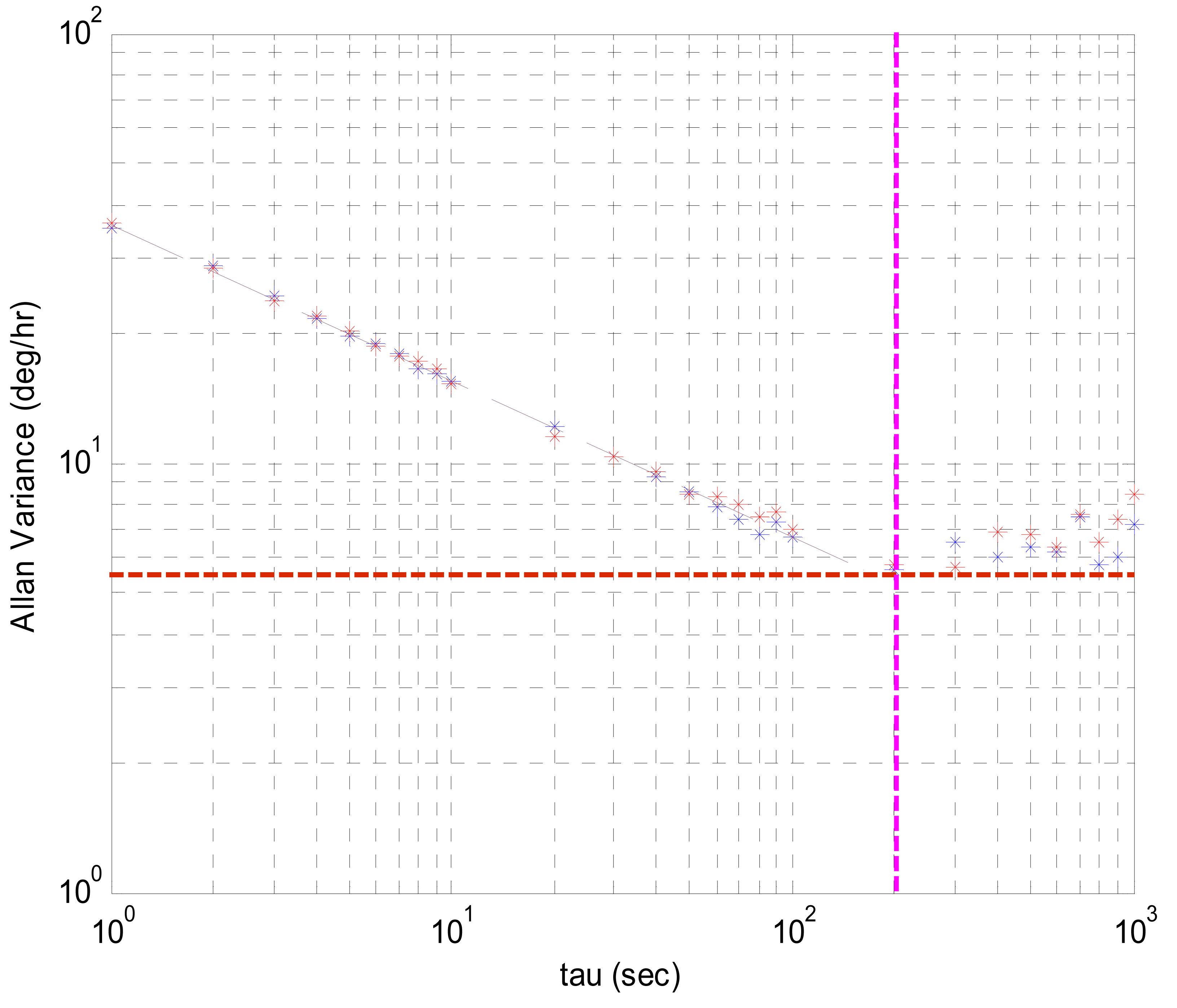
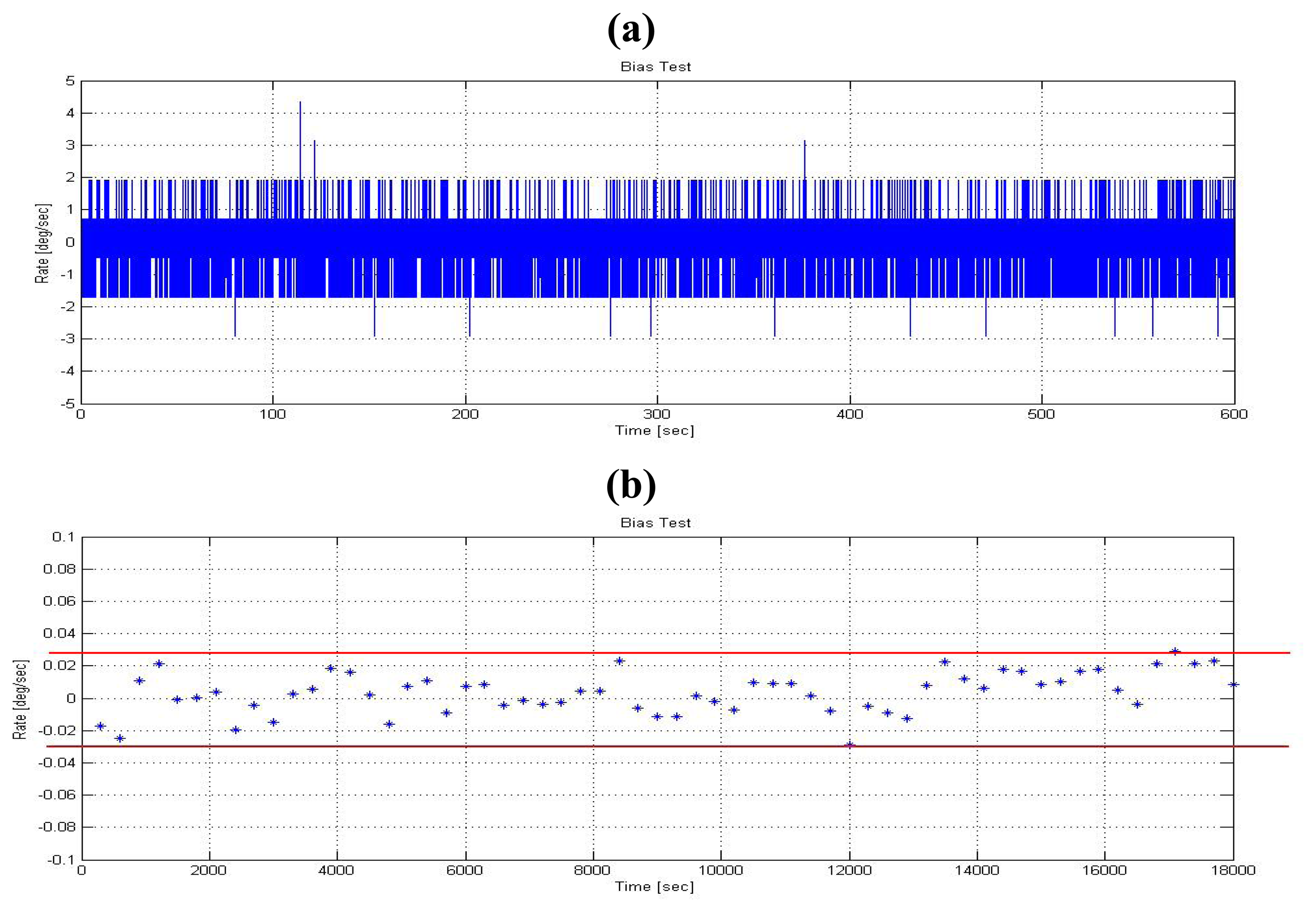
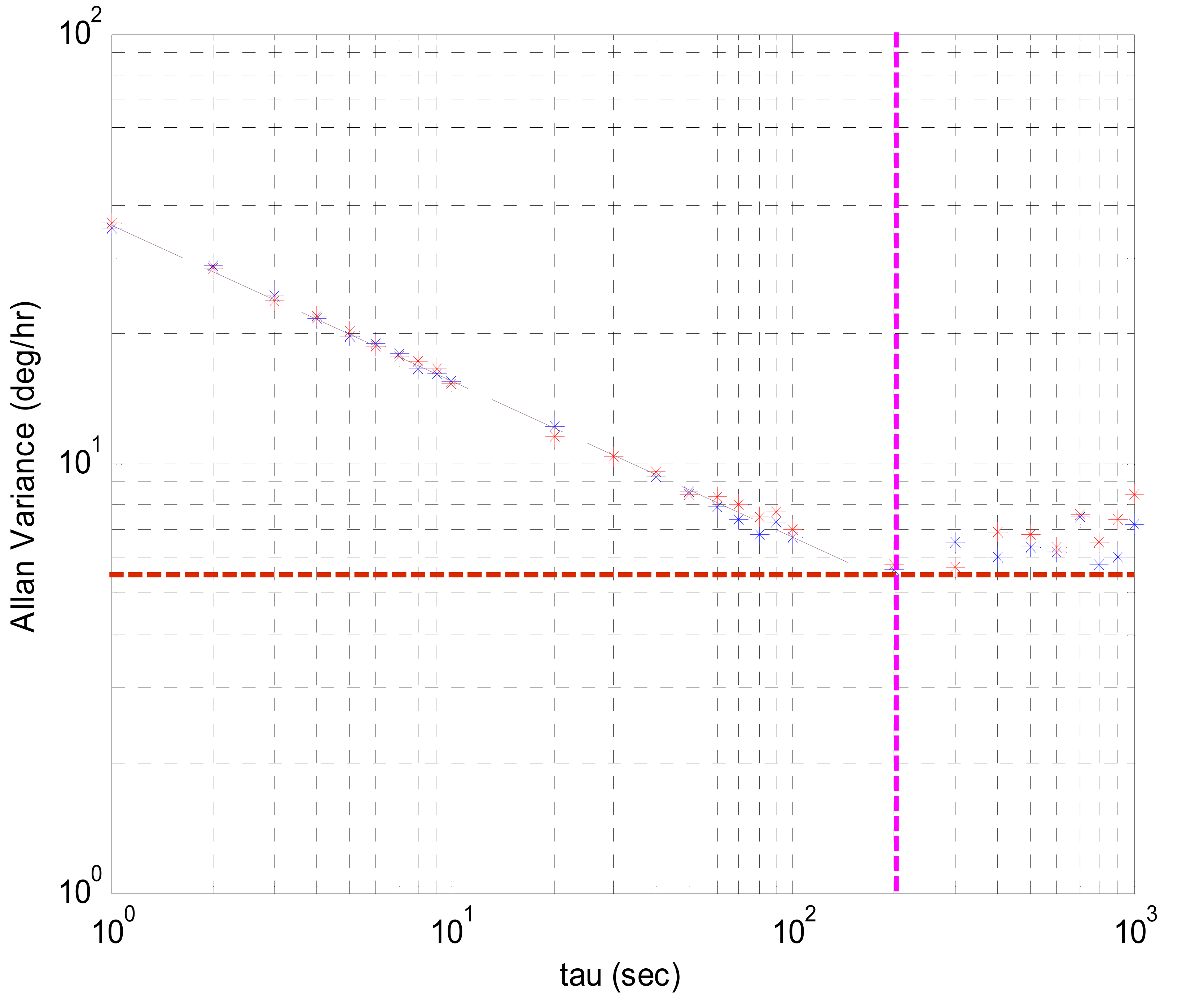
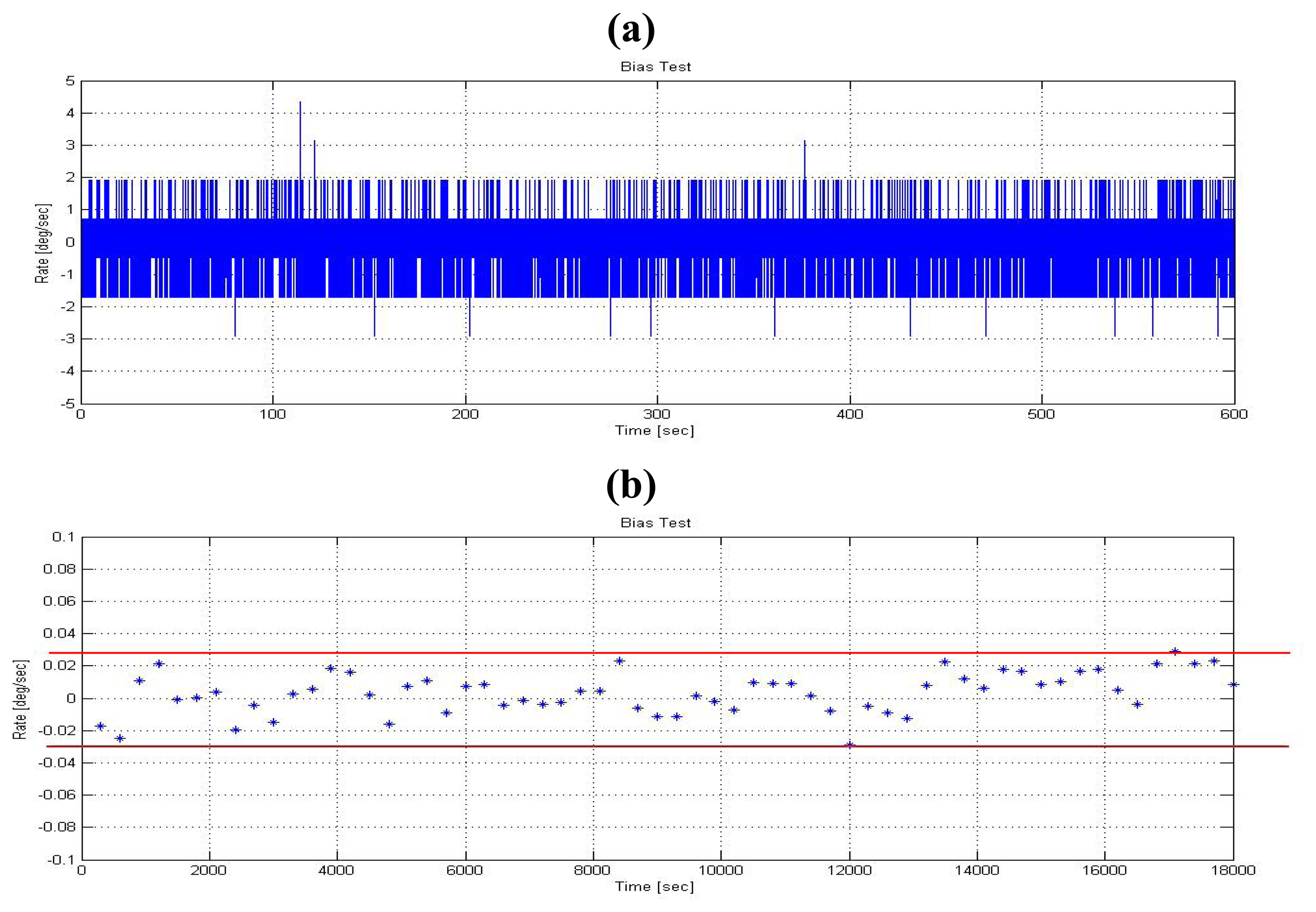
2.1. Stability Tests
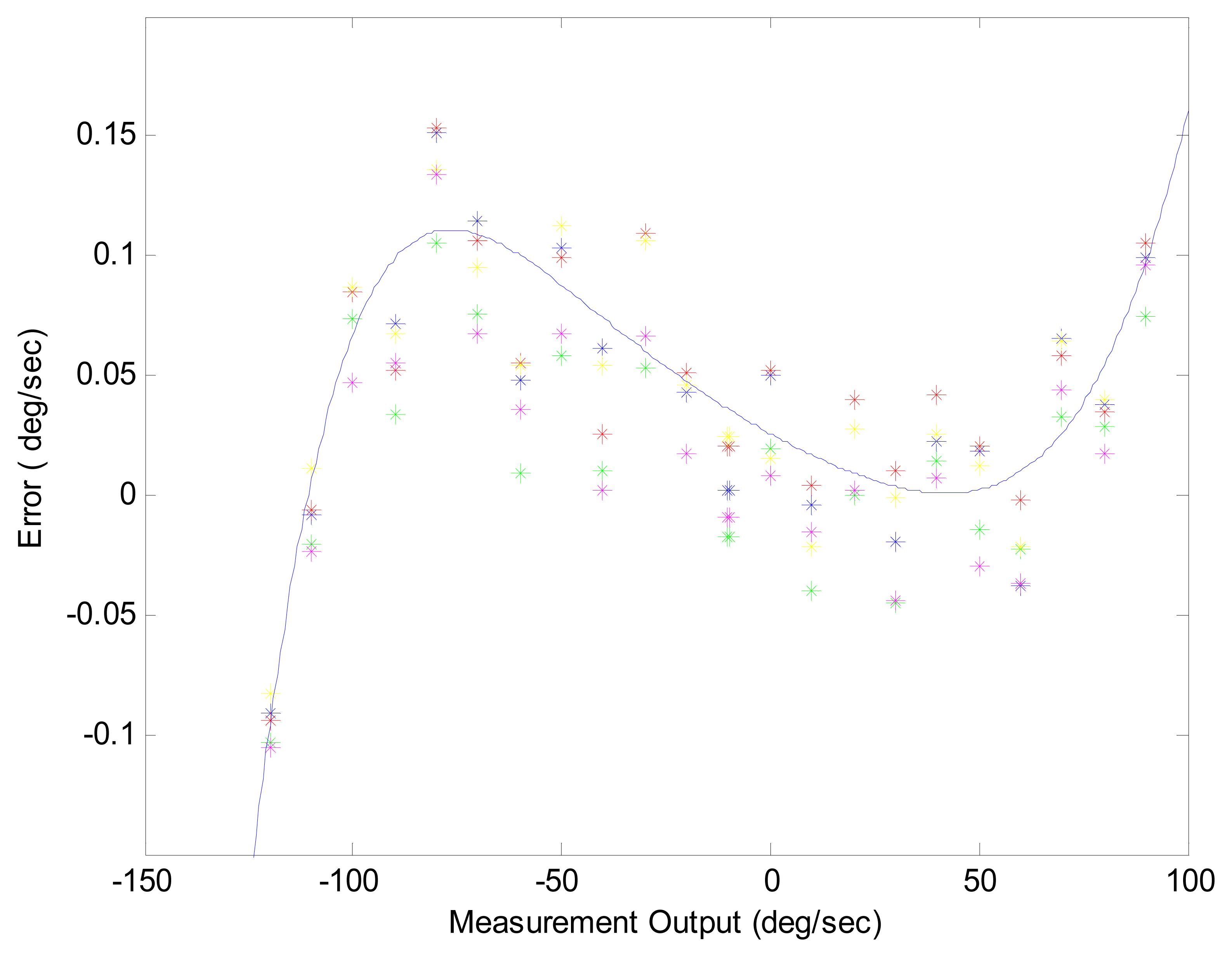
2.2. Rate Transfer Tests
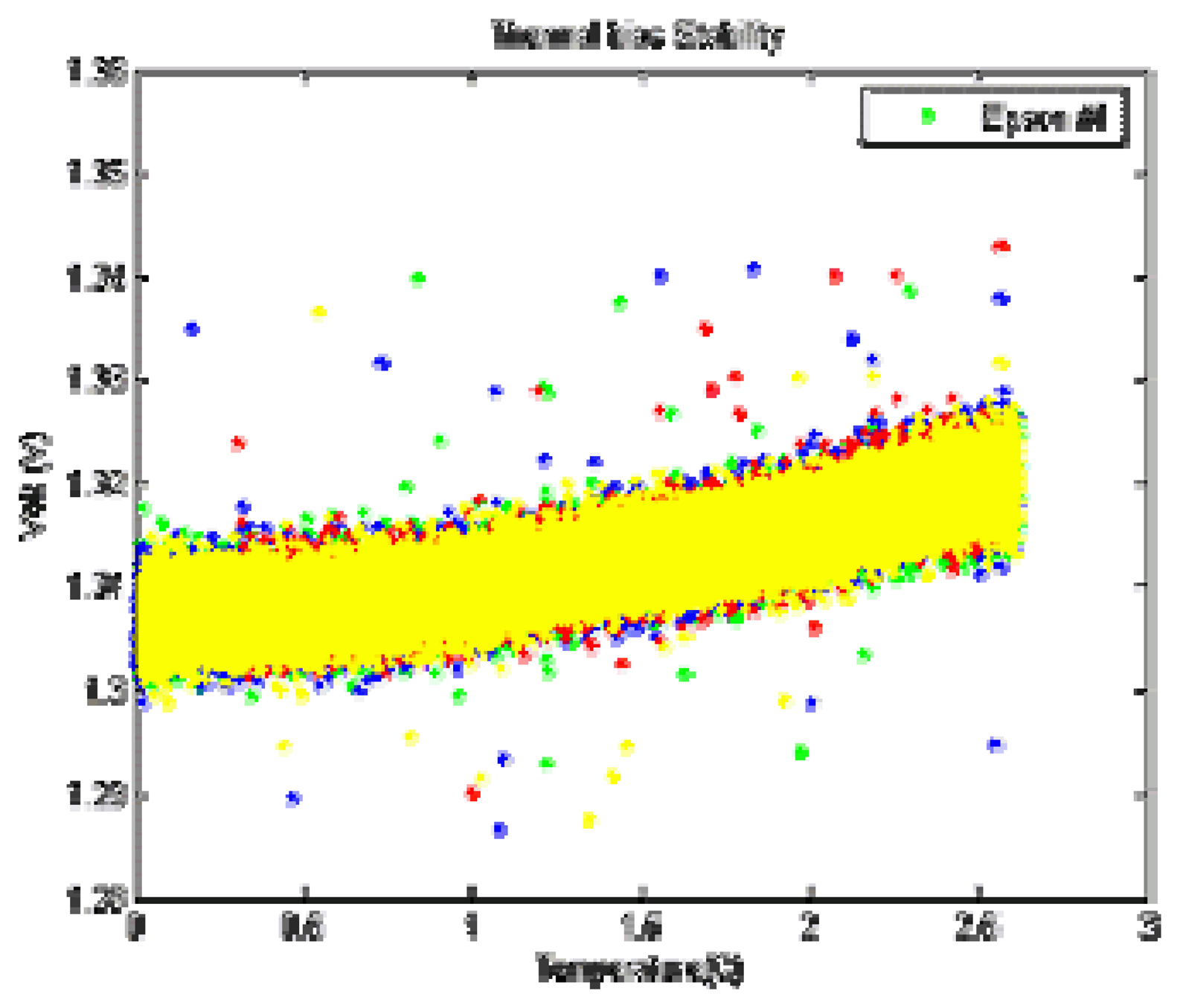
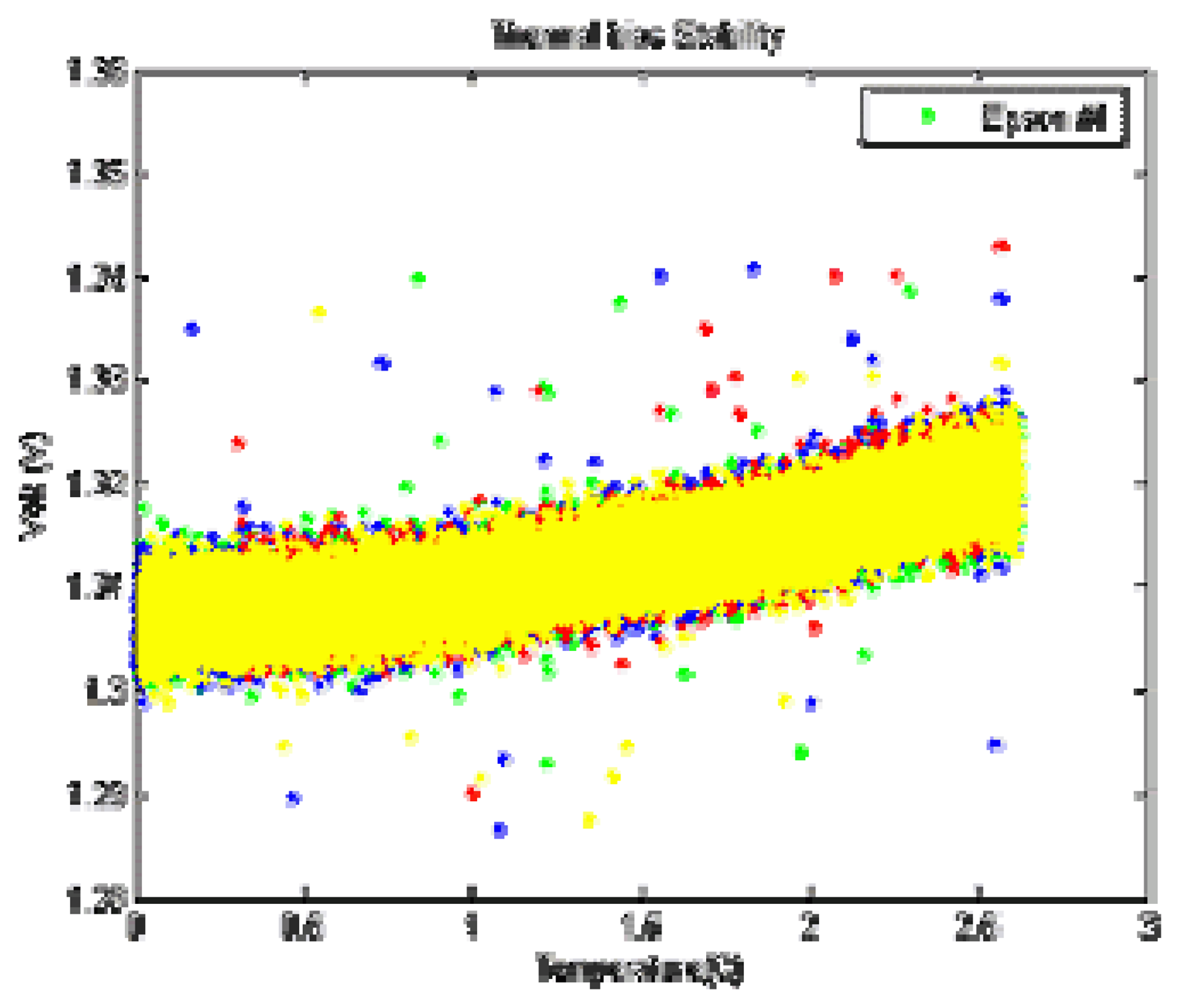
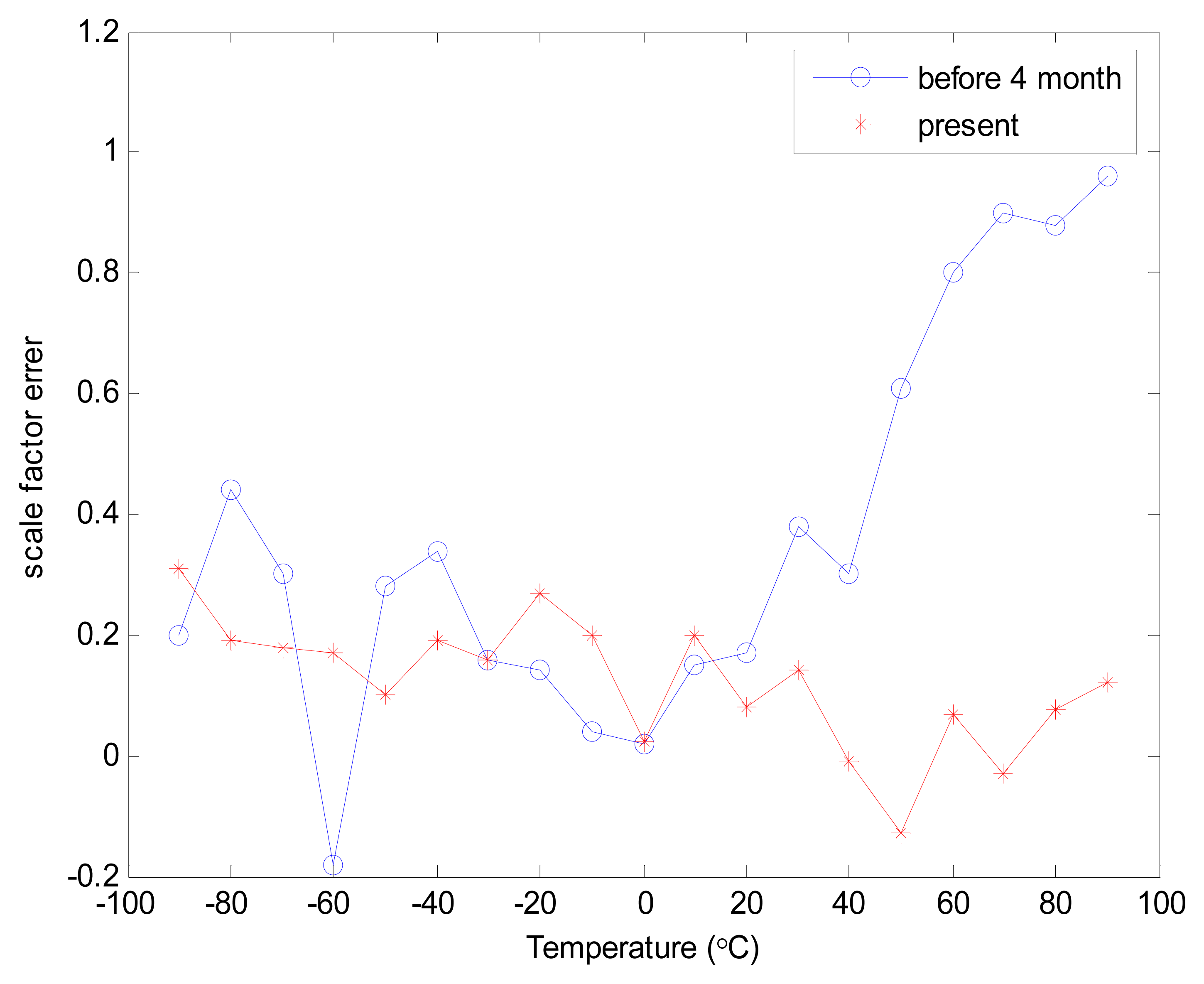
2.3. Thermal and Aging Tests
3. Minimal-drift Heading Angle Measurement
3.1. Self-calibration with Least Squares Algorithm
- 1)
- Least squares algorithm with heading referenceThe least squares algorithm presented in [8] is introduced to find the calibration coefficients, s̄ and b̄ of (3). Consider the discrete-time state equation relating heading and yaw ratewhere ψ(k+1) is the future heading, ψ(k) is the initial heading, and h is sample period. For any future index n > k ≥ 0, (4) is rewrittenTaking a number of reference (true) values of heading from the predetermined known motion profile of a robot platform (i.e. typical open-loop controlled motion profile that is assumed to be lifetime identical with precise data set provided by a factory) and measurements from the gyro for increasing n and stacking the equations yields the matrix equation:where , , G=[G1 G2], , andNow a least squares estimate of the scale and bias coefficients can be found by solving (6) for qThe vector q can be found as long as GTG is nonsingular, meaning that the robot should be changing rate during the calibration.
- 2)
- Least squares algorithm with rate referenceIf the reference (true) values are given as angular rate (instead of heading angle) about the predetermined known motion profile of a robot platform, this algorithm is reduced to just direct least squares problem to find s̄ and b̄ of (3) that best fit the data (rm) to true reference data (r). The following matrix equation is the result of the least squares analysis and can be used to solve for s̄ and b̄ using Kramer's Rule:Now a least squares estimate of s̄ and b̄ can be found by solving (8) for qwhere , andThe vector q can be found as long as G˜ is nonsingular, meaning that the robot should be changing rate during the calibration.
- 3)
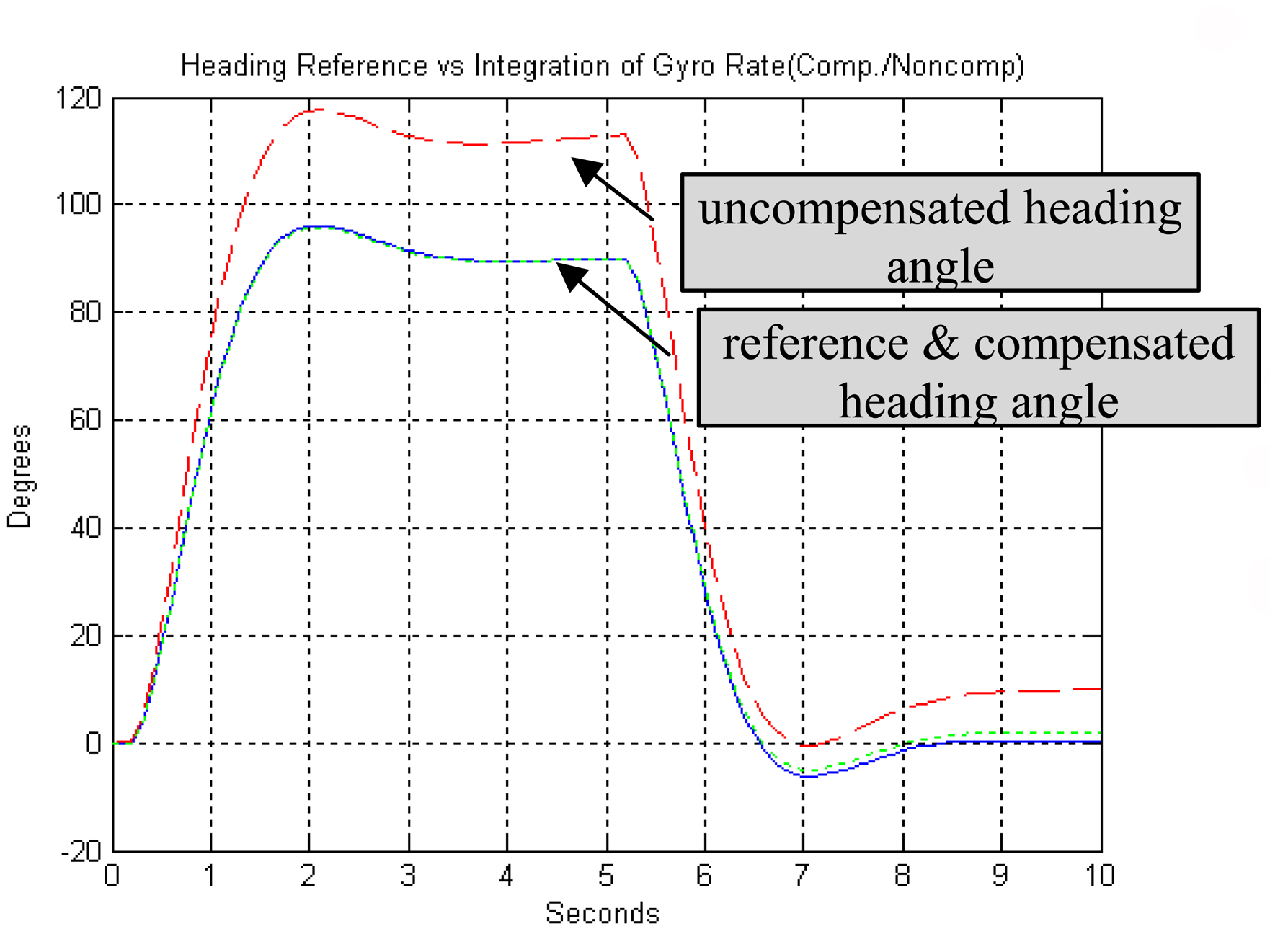
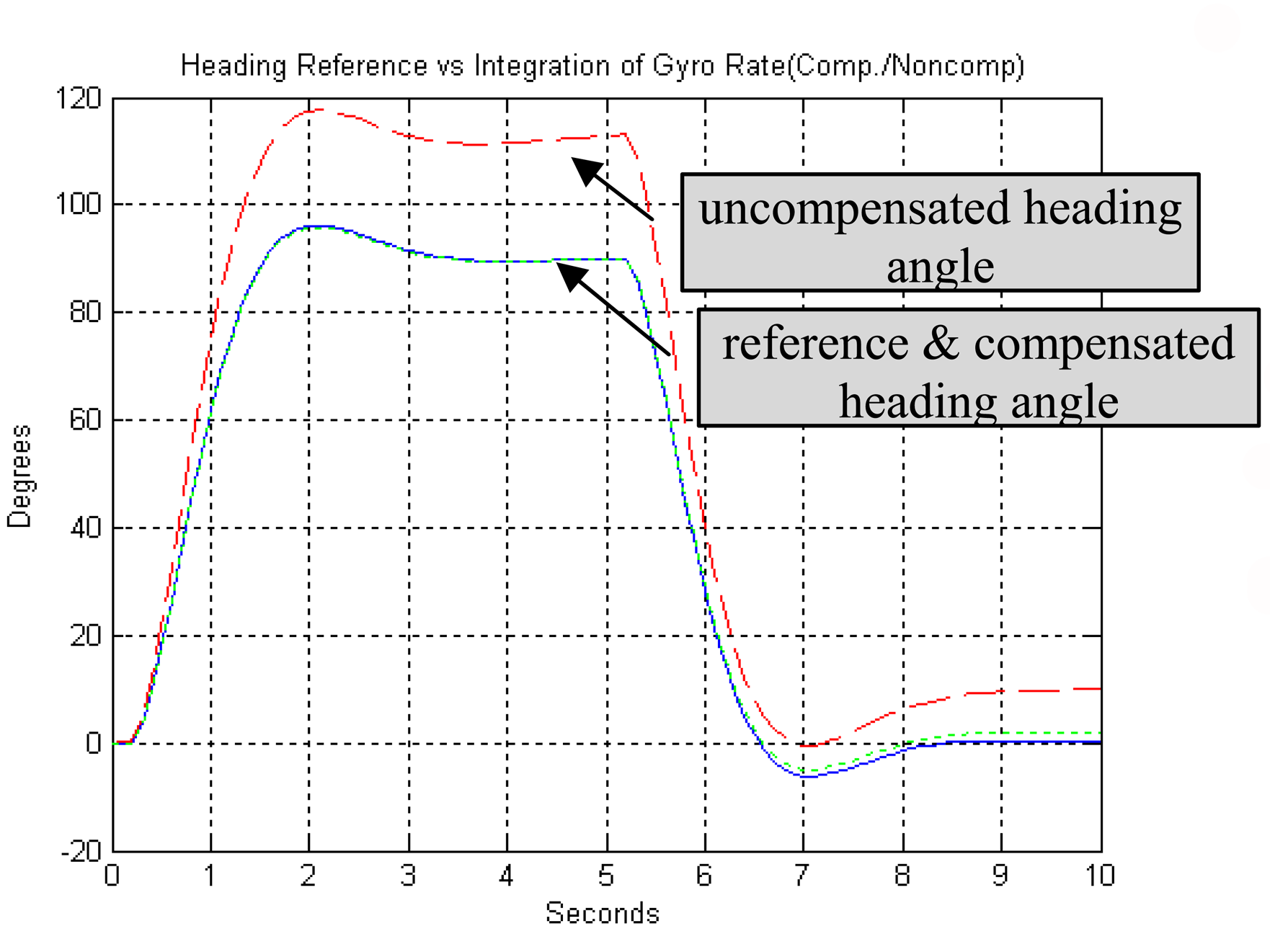
- EvaluationTo evaluate the performance of this algorithm, some simulations are done with heading reference and rate reference data for some specified motion profiles. For all simulations, gyro scale and bias factors were set to s= -10 % and b= 0.1 rad/sec, corresponding to coefficient value of s̄ =1.111, b̄ =-0.111. Figure 6 shows the discrepancies between reference heading and gyro heading (integration of rate). Figure 7 shows the discrepancies between reference rate and gyro rate. The proposed least squares algorithm with heading reference found the coefficients of s (=-9.52%) and b (=0.08 rad/sec) with error of 4.8% and 20.26%, respectively. On the other hand, least squares algorithm with rate reference showed 0% error both s and b. Subsequently, when gyro measurements are compensated with the estimated coefficients, they show almost identical to reference data as shown in Figures 6 and 7.
3.2. Threshold Filter
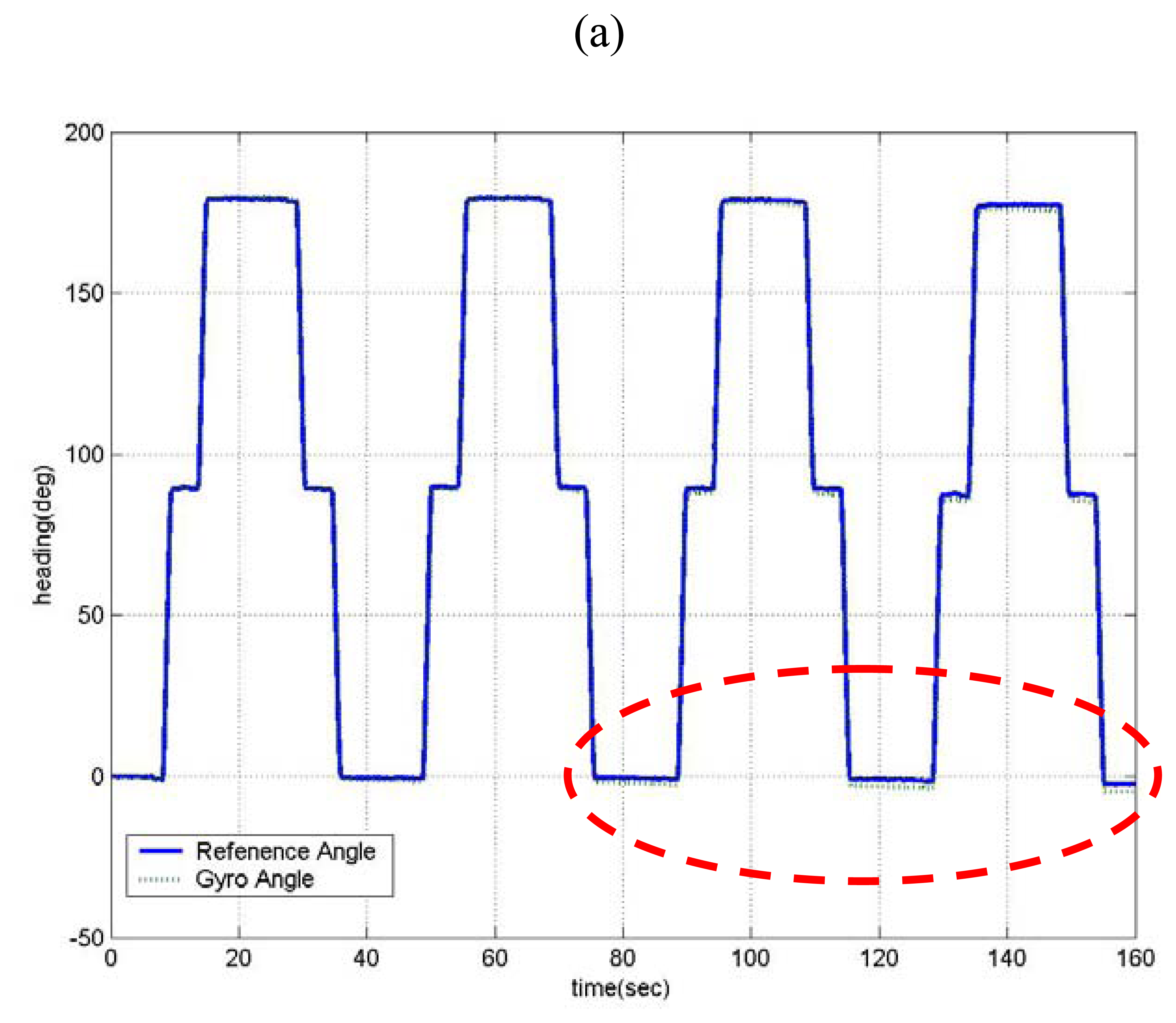
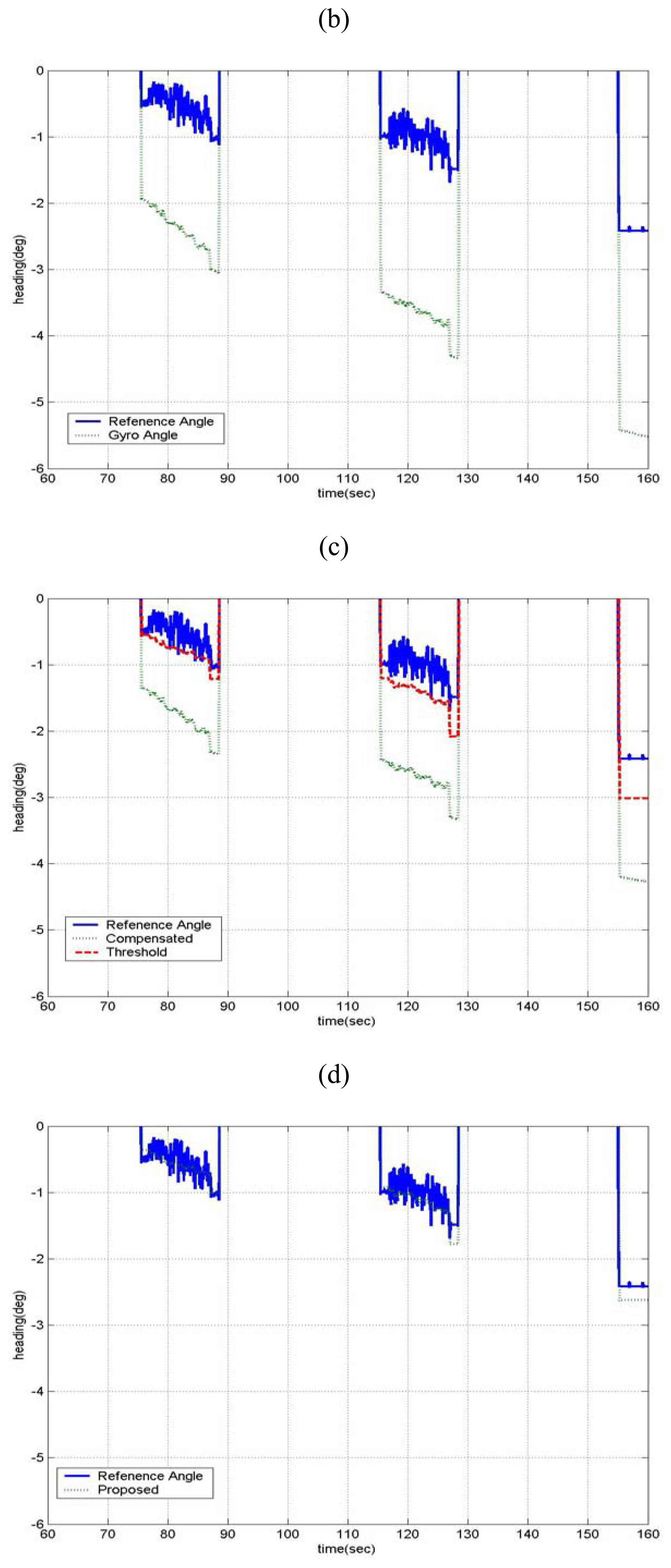
4. Experimental Results
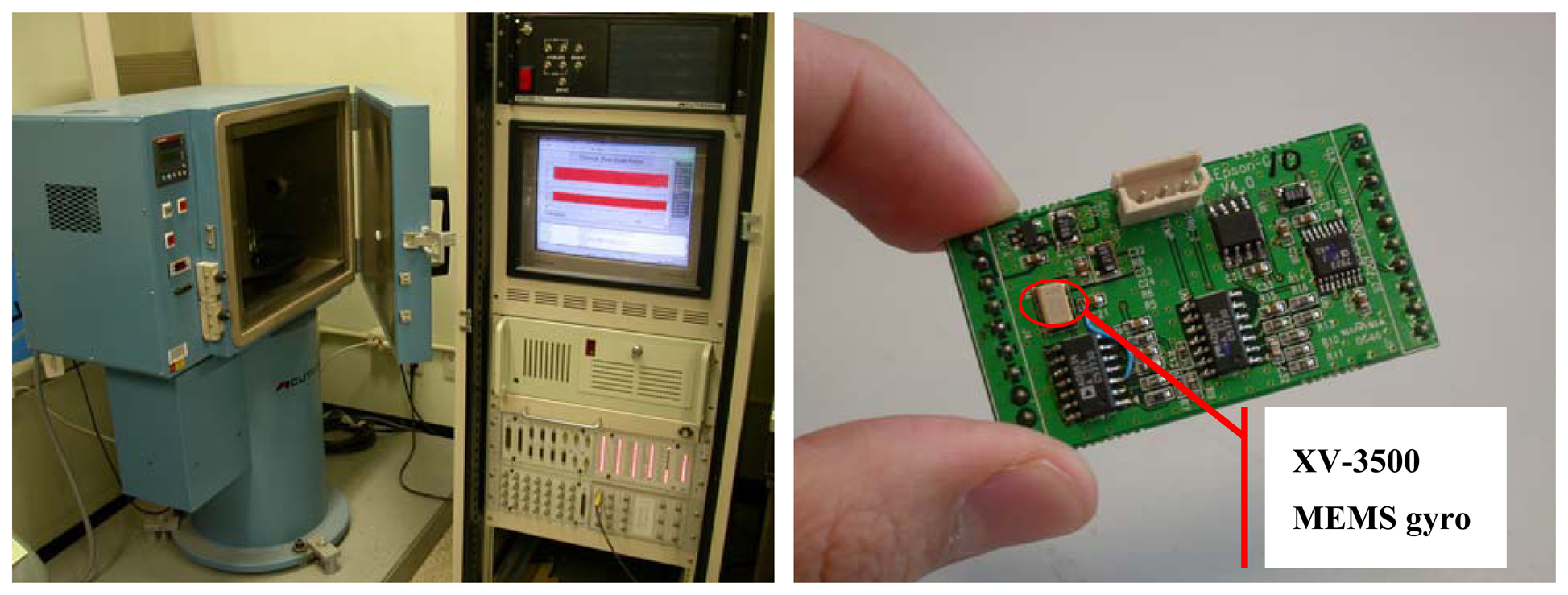
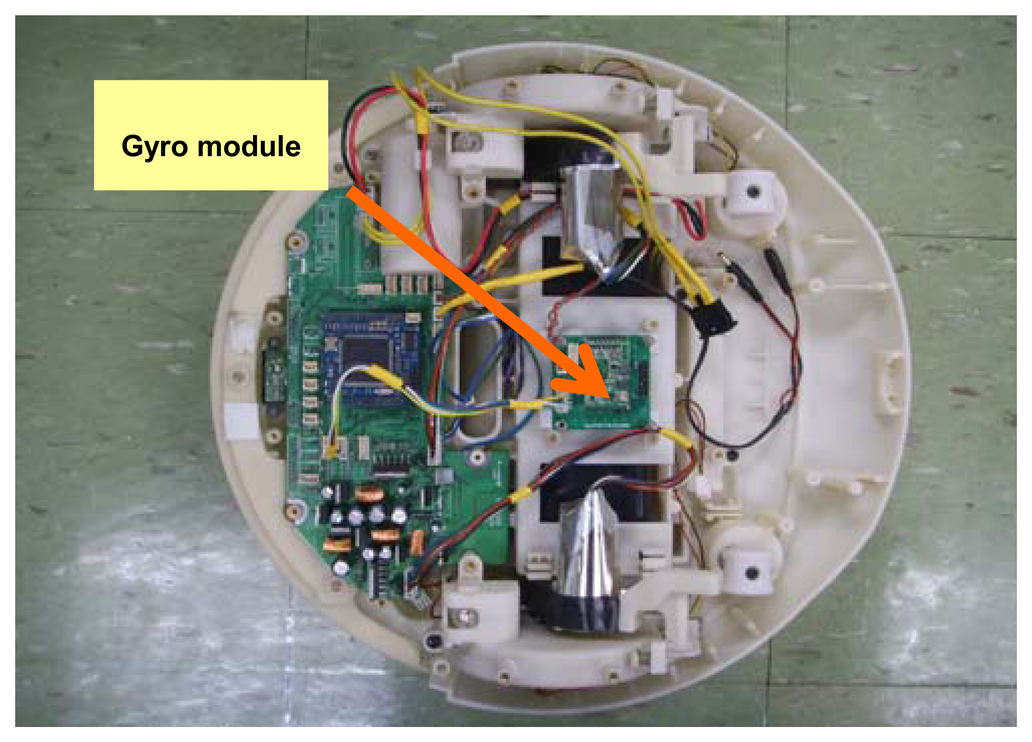
4.1. Experimental Setup
4.2. Results
5. Conclusions
References and Notes
- Salazar-Cruz, S.; Escareno, J.; Lara, D.; Lozano, R. Embedded control system for a four-rotor UAV. Int. J. Adapt. Control. Signal Process. 2007, 21, 189–204. [Google Scholar]
- Mc Kerrow, P. Modeling the Dragan-flyer for-rotor helicopter. Proc. of the 2004 IEEE Int. Conf. on Robotics & Automation, New Orleans, LA; 2004; pp. 3596–3601. [Google Scholar]
- Barshan, B.; Durrant-Whyte, H.F. Inertial Navigation System for Mobile Robots. IEEE Trans. Robot. Autom. 1995, 11, 328–342. [Google Scholar]
- De Cecco, M. Sensor fusion of inertial-odometric navigation as a function of the actual maneuvers of autonomous guided vehicles. Meas. Sci. Tech. 2003, 14, 643–653. [Google Scholar]
- Jetto, L.; Longhi, S.; Vitali, D. Localization of a wheeled mobile robot by sensor data fusion based on a fuzzy logic adapted Kalman filter. Cont. Eng. Prac. 1999, 7, 763–771. [Google Scholar]
- Yazdi, N.; Ayazi, F.; Najafi, K. Micromachined Inertial Sensors. Proc. IEEE 1998, 86(8), 1640–1659. [Google Scholar]
- Chung, H.; Ojeda, L.; Borenstein, J. Accurate Mobile Robot Dead-reckoning with a Precision-calibrated Fiber Optic Gyroscope. IEEE Trans. Robot. Autom. 2001, 17, 80–84. [Google Scholar]
- Hong, S. K. Compensation of Nonlinear Thermal Bias Drift of Resonant Rate Sensor (RRS) using Fuzzy Logic. Sens. Actuat. A-Phys. 1999, 78, 143–148. [Google Scholar]
- Skaloud, J.; Bruton, A. M.; Schwarz, K. P. Detection and Filtering of Short-Term noise in Inertial Sensors. J. Inst. Nav. 1999, 46, 97–107. [Google Scholar]
- Hong, S. K. Fuzzy Logic based Closed-Loop Strapdown Attitude System for Unmanned Aerial Vehicle (UAV). Sens. Actuat. A-Phys. 2003, 107, 109–118. [Google Scholar]
- Stilwell, D.J.; Wick, C.E.; Bishop, B.E. Small Inertial Sensors for a Miniature Autonomous Underwater Vehicle. Proc. of IEEE Int. Conf. on Control Applications, Mexico; 2001; pp. 841–846. [Google Scholar]
- Angular Rate Sensor ADXRS300 Data sheets, Rev. B.; Analog Devices Inc.: Norwood, MA, USA, 2004.
- Barbour, N.; Schmidt, G. Inertial Sensor Technology Trends. IEEE Sens. J. 2001, 1, 332–339. [Google Scholar]
- Titterton, D.H.; Weston, J.L. Strapdown inertial navigation technology, 2nd Ed. ed; AIAA: Reston, VA, USA, 2004. [Google Scholar]
- Pittelkau, M.E. Kalman Filtering for Spacecraft System Alignment Calibration. AIAA J. Guid. Contro. Dynam. 2001, 24, 109–118. [Google Scholar]
- Lam, Q.; Stamatakos, N.; Woodruff, C.; Ashton, S. Gyro Modeling and Its Random Noise Estimation. Proc. of the AIAA GN&C Conference; 2003; pp. 841–846. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| pure integration | self-calibration | Threshold filter | proposed | |
|---|---|---|---|---|
| Mean error | 1.6675 | 1.1511 | 0.7768 | 0.5985 |
| Standard dev. | 1.5075 | 1.1675 | 1.2653 | 1.2998 |
© 2008 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Hong, S.K.; Park, S. Minimal-Drift Heading Measurement using a MEMS Gyro for Indoor Mobile Robots. Sensors 2008, 8, 7287-7299. https://doi.org/10.3390/s8117287
Hong SK, Park S. Minimal-Drift Heading Measurement using a MEMS Gyro for Indoor Mobile Robots. Sensors. 2008; 8(11):7287-7299. https://doi.org/10.3390/s8117287
Chicago/Turabian StyleHong, Sung Kyung, and Sungsu Park. 2008. "Minimal-Drift Heading Measurement using a MEMS Gyro for Indoor Mobile Robots" Sensors 8, no. 11: 7287-7299. https://doi.org/10.3390/s8117287
APA StyleHong, S. K., & Park, S. (2008). Minimal-Drift Heading Measurement using a MEMS Gyro for Indoor Mobile Robots. Sensors, 8(11), 7287-7299. https://doi.org/10.3390/s8117287