
A Study on the Effects of the Dynamic Features of Light-Based eHMI on Pedestrians’ Crossing Behavior


Highlights
- The research contributes a factorial design framework that systematically isolates the specific effects of animation pattern, speed, and light-emitting area. It identifies animation speed as the most critical dynamic feature of light-based eHMIs, demonstrating that faster light loops significantly deter pedestrians from crossing by signaling non-yielding intent.
- The influence of dynamic cues is highly context-dependent, with lighting features significantly affecting decisions primarily during constant vehicle motion or longer time gaps, whereas vehicle kinematics dominate during deceleration. The AV should dynamically adapt lighting characteristics to optimize pedestrian safety in mixed traffic.
Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Apparatus
2.3. Independent and Dependent Variables
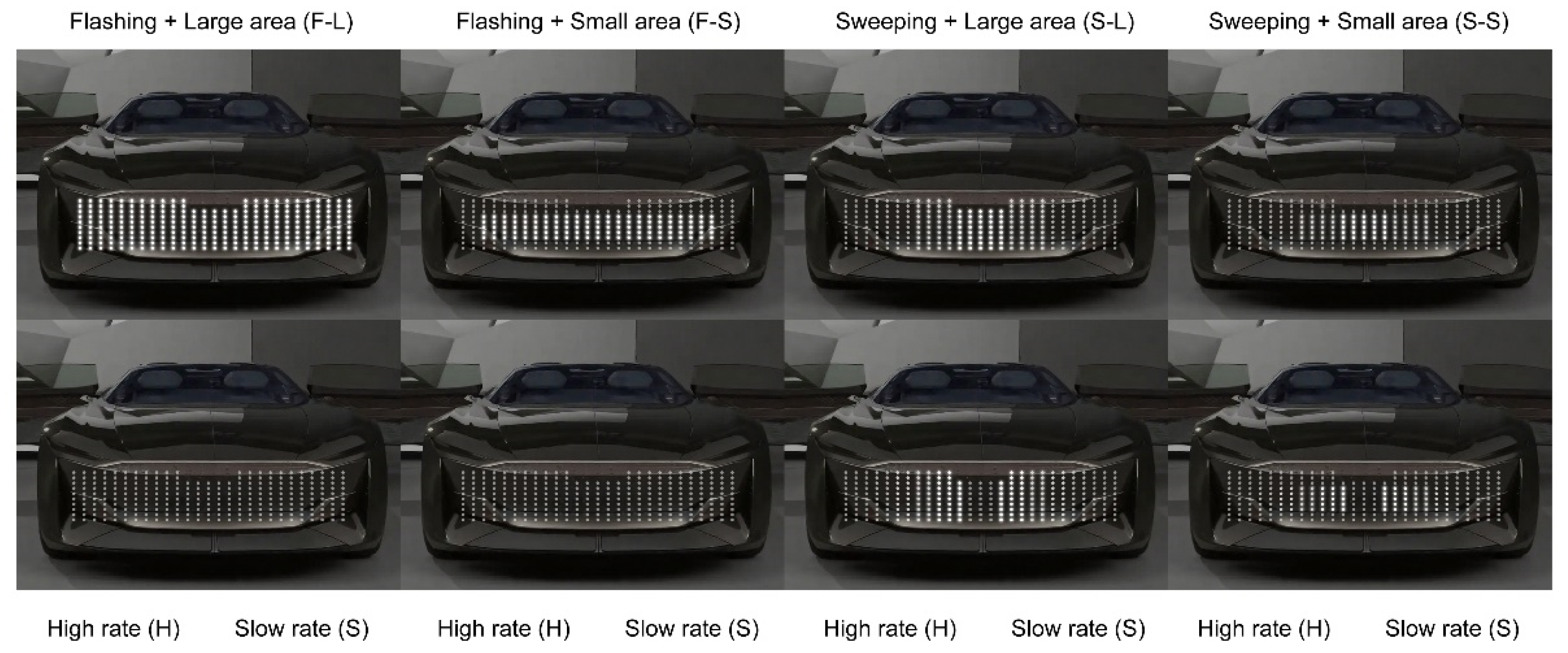
2.3.1. Independent Variables
2.3.2. Dependent Variables
2.4. Experimental Setup
2.5. Procedures
2.6. Data Processing
3. Results
3.1. Objective Measures
3.1.1. The State Where the AV Is Travelling at a Constant Speed
3.1.2. The State Where the AV Is Decelerating
3.2. Subjective Ratings
3.2.1. Measures for the State Where the AV Is Travelling at a Constant Speed
3.2.2. Measures for the Two Vehicle Motion States
4. Discussion
4.1. General Discussions
4.2. Limitations and Future Work
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sucha, M.; Dostal, D.; Risser, R. Pedestrian-driver communication and decision strategies at marked crossings. Accid. Anal. Prev. 2017, 102, 41–50. [Google Scholar] [CrossRef]
- Kühnlenz, K.; Kühnlenz, B. Autonomous vehicle eHMI communication modalities: Pedestrian preferences in crossing scenarios. Automatisierungstechnik 2024, 72, 1160–1168. [Google Scholar] [CrossRef]
- Man, S.S.; Huang, C.; Ye, Q.; Chang, F.; Chan, A.H.S. Pedestrians’ interaction with eHMI-equipped autonomous vehicles: A bibliometric analysis and systematic review. Accid. Anal. Prev. 2025, 209, 107826. [Google Scholar] [CrossRef] [PubMed]
- Dey, D.; Senan, T.; Hengeveld, B. Multi-modal eHMIs: The relative impact of light and sound in AV-pedestrian interaction. In Proceedings of the 2024 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 11–16 May 2024. [Google Scholar]
- Lau, M.; Jipp, M.; Oehl, M. One solution fits all? evaluating different communication strategies of a light-based external human-machine interface for differently sized automated vehicles from a pedestrian’s perspective. Accid. Anal. Prev. 2022, 171, 106641. [Google Scholar] [CrossRef] [PubMed]
- Madigan, R.; Lee, Y.M.; Lyu, W.; Carlowitz, S.; de Pedro, J.G.; Merat, N. Pedestrian interactions with automated vehicles: Does the presence of a zebra crossing affect how eHMIs and movement patterns are interpreted? Transp. Res. Part F Traffic Psychol. Behav. 2023, 98, 170–185. [Google Scholar] [CrossRef]
- Eisma, Y.B.; Reiff, A.; Kooijman, L.; Dodou, D.; de Winter, J.C.F. External human-machine interfaces: Effects of message perspective. Transp. Res. Part F Traffic Psychol. Behav. 2021, 78, 30–41. [Google Scholar] [CrossRef]
- Wei, S.L.; Eisele, D.; Petzoldt, T. External human-machine-interfaces on automated vehicles: Which message and perspective do pedestrians in crossing situations understand best? In Intelligent Human Systems Integration (IHSI 2022): Integrating People and Intelligent Systems; AHFE International: New York, NY, USA, 2022. [Google Scholar] [CrossRef]
- Dou, J.; Chen, S.; Tang, Z.; Xu, C.; Xue, C. Evaluation of multimodal external human–machine interface for driverless vehicles in virtual reality. Symmetry 2021, 13, 687. [Google Scholar] [CrossRef]
- Mahadevan, K.; Somanath, S.; Sharlin, E. Communicating awareness and intent in autonomous vehicle-pedestrian interaction. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; ACM: Singapore, 2018; pp. 1–12. [Google Scholar]
- Métayer, N.; Coeugnet, S. Improving the experience in the pedestrian’s interaction with an autonomous vehicle: An ergonomic comparison of external HMI. Appl. Ergon. 2021, 96, 103478. [Google Scholar]
- Chang, C.-M.; Toda, K.; Gui, X.; Seo, S.H.; Igarashi, T. Can eyes on a car reduce traffic accidents? In Proceedings of the AutomotiveUI ’22: Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seoul, Republic of Korea, 17–20 September 2022; pp. 349–359. [Google Scholar]
- Verstegen, R.; Dey, D.; Pfleging, B. CommDisk: A holistic 360° eHMI concept to facilitate scalable, unambiguous interactions between automated vehicles and other road users. In Proceedings of the 13th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Online, 9–14 September 2021; pp. 132–136. [Google Scholar] [CrossRef]
- Chang, X.; Chen, Z.; Dong, X.; Cai, Y. “It must be gesturing towards me”: Gesture-based interaction between autonomous vehicles and pedestrians. In Proceedings of the 2024 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 11–16 May 2024; pp. 1–25. [Google Scholar] [CrossRef]
- Lim, D.; Kwon, Y. How to design the eHMI of AVs for urgent warning to other drivers with limited visibility? Sensors 2023, 23, 3721. [Google Scholar] [CrossRef]
- Lim, D.; Kim, Y.; Shin, Y.; Yu, M.S. External human–machine interfaces of autonomous vehicles: Insights from observations on the behavior of game players driving conventional cars in mixed traffic. Vehicles 2024, 6, 1284–1299. [Google Scholar] [CrossRef]
- Bazilinskyy, P.; Kooijman, L.; Dodou, D.; Winter, J.C.F.D. How should external human-machine interfaces behave? Examining the effects of colour, position, message, activation distance, vehicle yielding, and visual distraction among 1434 participants. Appl. Ergon. 2021, 95, 103450. [Google Scholar]
- De Clercq, K.; Dietrich, A.; Núñez Velasco, J.P.; De Winter, J.; Happee, R. External human-machine interfaces on automated vehicles: Effects on pedestrian crossing decisions. Hum. Factors J. Hum. Factors Ergon. Soc. 2019, 61, 1353–1370. [Google Scholar]
- Al-Taie, A.; Wilson, G.; Pollick, F.; Brewster, S. Pimp my ride: Designing versatile eHMIs for cyclists. In Proceedings of the AutomotiveUI ’23: Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ingolstadt, Germany, 18–22 September 2023. [Google Scholar]
- Li, Y.; Cheng, H.; Zeng, Z.; Liu, H.; Sester, M. Autonomous vehicles drive into shared spaces: eHMI design concept focusing on vulnerable road users. In Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–21 September 2021. [Google Scholar]
- Lyu, W.; Zhang, W.G.; Wang, X.; Ding, Y.; Yang, X. Pedestrians’ responses to scalable automated vehicles with different external human-machine interfaces: Evidence from a video-based eye-tracking experiment. Transp. Res. Part F Psychol. Behav. 2024, 103, 112–127. [Google Scholar]
- Eisma, Y.B.; van Gent, L.; de Winter, J. Should an external human-machine interface flash or just show text? A study with a gaze-contingent setup. Transp. Res. Part F Psychol. Behav. 2023, 97, 140–154. [Google Scholar] [CrossRef]
- Almodfer, R.; Xiong, S.; Fang, Z.; Kong, X.; Zheng, S. Quantitative analysis of lane-based pedestrian-vehicle conflict at a non-signalized marked crosswalk. Transp. Res. Part F Psychol. Behav. 2016, 42, 468–478. [Google Scholar]
- Hensch, A.C.; Neumann, I.; Beggiato, M.; Halama, J.; Krems, J.F. Steady, flashing, sweeping—An exploratory evaluation of light signals as an eHMI in automated driving. In Proceedings of the HFES Europe Chapter Annual Meeting-Understanding Human Behavior in Complex Systems, Nantes, France, 2–4 October 2019. [Google Scholar] [CrossRef]
- Hoomhout, J.; Jumpertz, L.; Mason, J.; Bergman, T. Exploration into lighting dynamics for the design of more pleasurable luminaires. In Proceedings of the DPPI’13: Proceedings of the 6th International Conference on Designing Pleasurable Products and Interfaces, Newcastle, UK, 3–5 September 2013; pp. 185–192. [Google Scholar] [CrossRef]
- Al-Taie, A.; Wilson, G.; Freeman, E.; Pollick, F.; Brewster, S.A. Light it up: Evaluating versatile autonomous vehicle-cyclist external human-machine interfaces. In Proceedings of the 2024 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 11–16 May 2024. [Google Scholar]
- Eisele, D.; Petzoldt, T. Effects of a frontal brake light on pedestrians’ willingness to cross the street. Transp. Res. Interdiscip. Perspect. 2024, 23, 100990. [Google Scholar]
- Tran, T.T.M.; Parker, C.; Hoggenmüller, M.; Wang, Y.; Tomitsch, M. Exploring the impact of interconnected external interfaces in autonomous vehicles on pedestrian safety and experience. In Proceedings of the 2024 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 11–16 May 2024. [Google Scholar]
- Loew, A.; Graefe, J.; Heil, L.; Riener, A.; Frison, A.-K. Go ahead, please!-Evaluation of external human-machine interfaces in a real-world crossing scenario. Front. Comput. Sci. 2022, 4, 863072. [Google Scholar] [CrossRef]
- Oudshoorn, M.; Winter, J.D.; Bazilinskyy, P.; Dodou, D. Bio-inspired intent communication for automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2021, 80, 127–140. [Google Scholar]
- Lyu, W.; Cao, Y.; Ding, Y.; Li, J.; Tian, K.; Zhang, H. Not all explicit cues help communicate: Pedestrians’ perceptions, fixations, and decisions toward automated vehicles with varied appearance. Accid. Anal. Prev. 2024, 211, 107889. [Google Scholar] [CrossRef]
- Song, Y.; Chen, X.; Zhang, J.; Tian, J.; Zhang, L.; Ma, G.; Zhuang, X. Road-crossing behavior and safety of pedestrians facing autonomous vehicles with an acceleration indicator eHMI in VR traffic flow. Transp. Res. Part F Psychol. Behav. 2024, 107, 589–606. [Google Scholar]
- Alhawiti, A.; Kwigizile, V.; Oh, J.S.; Houshyar, A.; Feizi, A. The effectiveness of eHMI displays on pedestrian–autonomous vehicle interaction in mixed-traffic environments. Sensors 2024, 24, 5018. [Google Scholar] [CrossRef]
- Löcken, A.; von Sawitzky, T.; Bauer, J.; Reiner, A. Exploring the potential of eHMIs as traffic light alternatives. In Proceedings of the AutomotiveUI ’23 Adjunct: Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ingolstadt, Germany, 18–22 September 2023. [Google Scholar]
- Dey, D.; Habibovic, A.; Pfleging, B.; Martens, M.H.; Terken, J.M.B. Color and animation preferences for a light band eHMI in interactions between automated vehicles and pedestrians. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020. [Google Scholar]
- Faas, S.M.; Baumann, M. Light-based external human machine interface: Color evaluation for self-driving vehicle and pedestrian interaction. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2019, 63, 1232–1236. [Google Scholar] [CrossRef]
- Carlowitz, S.; Madigan, R.; Lee, Y.M.; Tango, F.; Merat, N. Pedestrians’ perceptions of automated vehicle movements and light-based eHMIs in real world conditions: A test track study. Transp. Res. Part F Psychol. Behav. 2023, 95, 83–97. [Google Scholar] [CrossRef]
- Harrison, C.; Horstman, J.; Hsieh, G.; Hudson, S.E. Unlocking the expressivity of point lights. In Proceedings of the CHI’12: Proceedings of the SIGCHI Conference on Human Factors in Computing Syste, Austin, TX, USA, 5–10 May 2012. [Google Scholar]
- Guo, F.; Lyu, W.; Ren, Z.; Chen, Y. A Video-Based, Eyetracking Study to Investigate the Effect of eHMI Modalities and Locations on Pedestrian–Automated Vehicle Interaction. Sustainability 2022, 14, 5633. [Google Scholar] [CrossRef]
- Hensch, A.C.; Neumann, I.; Beggiato, M. Effects of a light-based communication approach as an external HMI for Automated Vehicles—A Wizard-of-Oz Study. Trans. Transp. Sci. 2019, 10, 18–32. [Google Scholar] [CrossRef]
- Lee, Y.M.; Madigan, R.; Uzondu, C.; Garcia, J.; Romano, R.; Markkula, G.; Merat, N. Learning to interpret novel eHMI: The effect of vehicle kinematics and eHMI familiarity on pedestrian’ crossing behavior. J. Saf. Res. 2022, 80, 270–280. [Google Scholar] [CrossRef]
- Faas, S.M.; Baumann, M. Yielding light signal evaluation for self-driving vehicle and pedestrian interaction. In International Conference on Human Systems Engineering and Design: Future Trends and Applications; Springer: Cham, Switzerland, 2020; pp. 189–194. [Google Scholar]
- Lau, M.; Le, D.H.; Oehl, M. Design of external human-machine interfaces for different automated vehicle types for the interaction with pedestrians on a shared space. In Proceedings of the 21st Congress of the International Ergonomics Association, Online, 13–18 June 2021; pp. 710–717. [Google Scholar]
- Lau, M.; Nguyen, H.P.; Jipp, M.; Oehl, M. From visions to reality: Investigating the interplay of vehicle kinematics and light-band eHMI in a real vehicle study. Transp. Res. Part F Traffic Psychol. Behav. 2024, 103, 79–95. [Google Scholar] [CrossRef]
- Lau, M.; Lee, J.; Kitazaki, S.; Daimon, T.; Oehl, M. Investigating implicit and explicit communication of highly automated vehicles in Japan: How do light-band eHMIs affect pedestrians’ willingness to cross, trust and perceived safety? Accid. Anal. Prev. 2024, 207, 107719. [Google Scholar] [CrossRef]
- Ginosar, E.; Cauchard, J.R. At first light: Expressive lights in support of drone-initiated communication. In Proceedings of the 2023 CHI Conference on Human Factors in Computing Systems, Hamburg, Germany, 23–28 April 2023. [Google Scholar] [CrossRef]
- Szafir, D.; Mutlu, B.; Fong, T. Communicating directionality in flying robots. In Proceedings of the HRI’15: Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction, Portland, OR, USA, 2–5 March 2015. [Google Scholar] [CrossRef]
- Kerber, F.; Hirtz, C.; Gehring, S.; Löchtefeld, M.; Krüger, A. Managing smartwatch notifications through Filtering and ambient illumination. In Proceedings of the MobileHCI ’16: Proceedings of the 18th International Conference on Human-Computer Interaction with Mobile Devices and Services Adjunct, Florence, Italy, 6–9 September 2016. [Google Scholar] [CrossRef]
- Baraka, K.; Rosenthal, S.; Veloso, M. Enhancing human understanding of a mobile robot’s state and actions using expressive lights. In Proceedings of the 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 652–657. [Google Scholar]
- Baraka, K.; Paiva, A.; Veloso, M. Expressive lights for revealing mobile service robot state. In Proceedings of the Robot’2015, The Second Iberian Robotics Conference, Lisbon, Portugal, 19–21 November 2015. [Google Scholar] [CrossRef]
- Zhao, X.; Li, X.; Rakotonirainy, A.; Bourgeois-Bougrine, S.; Gruyer, D.; Delhomme, P. The ‘invisible gorilla’ during pedestrian-AV interaction: Effects of secondary tasks on pedestrians’ reaction to eHMIs. Accid. Anal. Prev. 2023, 192, 107246. [Google Scholar] [CrossRef] [PubMed]
- Gould, M.; Poulter, D.R.; Helman, S.; Wann, J.P. Errors in judging the approach rate of motorcycles in nighttime conditions and the effect of an improved lighting configuration. Accid. Anal. Prev. 2012, 45, 432–437. [Google Scholar] [CrossRef] [PubMed]
- Tian, K.; Tzigieras, A.; Wei, C.; Lee, Y.M.; Holmes, C.; Leonetti, M.; Merat, N.; Romano, R. Deceleration parameters as implicit communication signals for pedestrians’ crossing decisions and estimations of automated vehicle behaviour. Accid. Anal. Prev. 2023, 190, 107173. [Google Scholar] [CrossRef]
- Rettenmaier, M.; Bengler, K. The matter of how and when: Comparing explicit and implicit communication strategies of automated vehicles in bottleneck scenarios. IEEE Open J. Intell. Transp. Syst. 2021, 2, 282–293. [Google Scholar] [CrossRef]
- She, J.; Islam, M.; Zhou, F. The effect of dynamic speed information and timing of displaying eHMI on automated vehicle and pedestrian interactions. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference IDETC/CIE2021, Online, 17–20 August 2021. [Google Scholar]
- Ippoliti, H.Ş.; Daudrich, A.; Dey, D.; Wintersberger, P.; Sadeghian, S.; Boll, S. A real bottleneck scenario with a Wizard of Oz automated vehicle-Role of eHMIs. In Proceedings of the AutomotiveUI ’23: Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ingolstadt, Germany, 18–22 September 2023. [Google Scholar]
- Dey, D.; Habibovic, A.; Berger, M.; Bansal, D.; Cuijpers, R.H.; Martens, M.H. Investigating the need for explicit communication of non-yielding intent through a slow-pulsing light band (SPLB) eHMI in AV-pedestrian interaction. In Proceedings of the AutomotiveUI ’22: Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seoul, Republic of Korea, 17–20 September 2022. [Google Scholar]
- Li, T.; Fu, Z.; Sun, Z.; Ding, H.; Wang, R.; Ji, A. Effects of vehicle speed on pedestrian movement at crosswalks: A case study using empirical data. Phys. A Stat. Mech. Appl. 2025, 660, 130377. [Google Scholar] [CrossRef]
- Liu, H.; Hirayama, T.; Morales Saiki, L.Y.; Murase, H. Implicit interaction with an autonomous personal mobility vehicle: Relations of pedestrians’ gaze behavior with situation awareness and perceived risks. Int. J. Hum.–Comput. Interact. 2023, 39, 2016–2032. [Google Scholar] [CrossRef]
- Walker, F.; Dey, D.; Martens, M.; Pfleging, B.; Eggen, B.; Terken, J. Feeling-of-Safety slider: Measuring pedestrian willingness to cross roads in field interactions with vehicles. In Proceedings of the CHI’19: Extended Abstracts of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019. [Google Scholar] [CrossRef]
- Lewis, J.R. Psychometric evaluation of an after-scenario questionnaire for computer usability studies. ACM Sigchi Bull. 1991, 23, 78–81. [Google Scholar] [CrossRef]
- Eisma, Y.B.; van Bergen, S.; ter Brake, S.M.; Hensen, M.T.T.; Tempelaar, W.J.; de Winter, J.C.F. External human-machine interfaces: The effect of display location on crossing intentions and eye movements. Information 2019, 11, 13. [Google Scholar] [CrossRef]
- Berge, S.H.; de Winter, J.; Cleij, D.; Hagenzieker, M. Triangulating the future: Developing scenarios of cyclist-automated vehicle interactions from literature, expert perspectives, and survey data. Transp. Res. Interdiscip. Perspect. 2024, 23, 100986. [Google Scholar]
- Song, S.; Yamda, S. Effect of expressive lights on human perception and interpretation of functional robot. In Proceedings of the CHI’18: Extended Abstracts of the 2018 CHI Conference on Human Factors in Computing Systems, Montréal, QC, Canada, 21–26 April 2018. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) Participants’ perceived likelihood that the AV detects the VRU and of vehicular yielding | ||||||||||||||||
| Topic | Disagree | Agree | ||||||||||||||
| 1. I think this vehicle light indicates that the AV has definitely detected my existence and appearance. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||||||
| 2. I think this vehicle light indicates a 100% likelihood of yielding of the AV. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||||||
| (b) Task difficulty and perceived safety | ||||||||||||||||
| Topic | Disagree | Agree | ||||||||||||||
| 1. I feel it is not difficult for the pedestrian to make crossing decisions in this scene. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | |||||||||
| 2. I feel safe crossing the road in this scene. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | |||||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.
Share and Cite
Xiao, Y.; Liu, Z.; Ma, T.; Huang, Y. A Study on the Effects of the Dynamic Features of Light-Based eHMI on Pedestrians’ Crossing Behavior. Sensors 2026, 26, 1247. https://doi.org/10.3390/s26041247
Xiao Y, Liu Z, Ma T, Huang Y. A Study on the Effects of the Dynamic Features of Light-Based eHMI on Pedestrians’ Crossing Behavior. Sensors. 2026; 26(4):1247. https://doi.org/10.3390/s26041247
Chicago/Turabian StyleXiao, Yiqi, Zhiming Liu, Tini Ma, and Yingjie Huang. 2026. "A Study on the Effects of the Dynamic Features of Light-Based eHMI on Pedestrians’ Crossing Behavior" Sensors 26, no. 4: 1247. https://doi.org/10.3390/s26041247
APA StyleXiao, Y., Liu, Z., Ma, T., & Huang, Y. (2026). A Study on the Effects of the Dynamic Features of Light-Based eHMI on Pedestrians’ Crossing Behavior. Sensors, 26(4), 1247. https://doi.org/10.3390/s26041247