
Human Dead Reckoning Using a Particle Filter and Map Constraints



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Highlights
- A particle filter applied to inertial measurement data can predict human position, provided map constraints are known, and the dimensions of the map used greatly affect the distance error of position prediction.
- A map that more tightly follows the motion path does not always yield better results.
- It matters what kind of map is used when localisation is supported by particle filters, and care should be taken to select the appropriate size of a map.
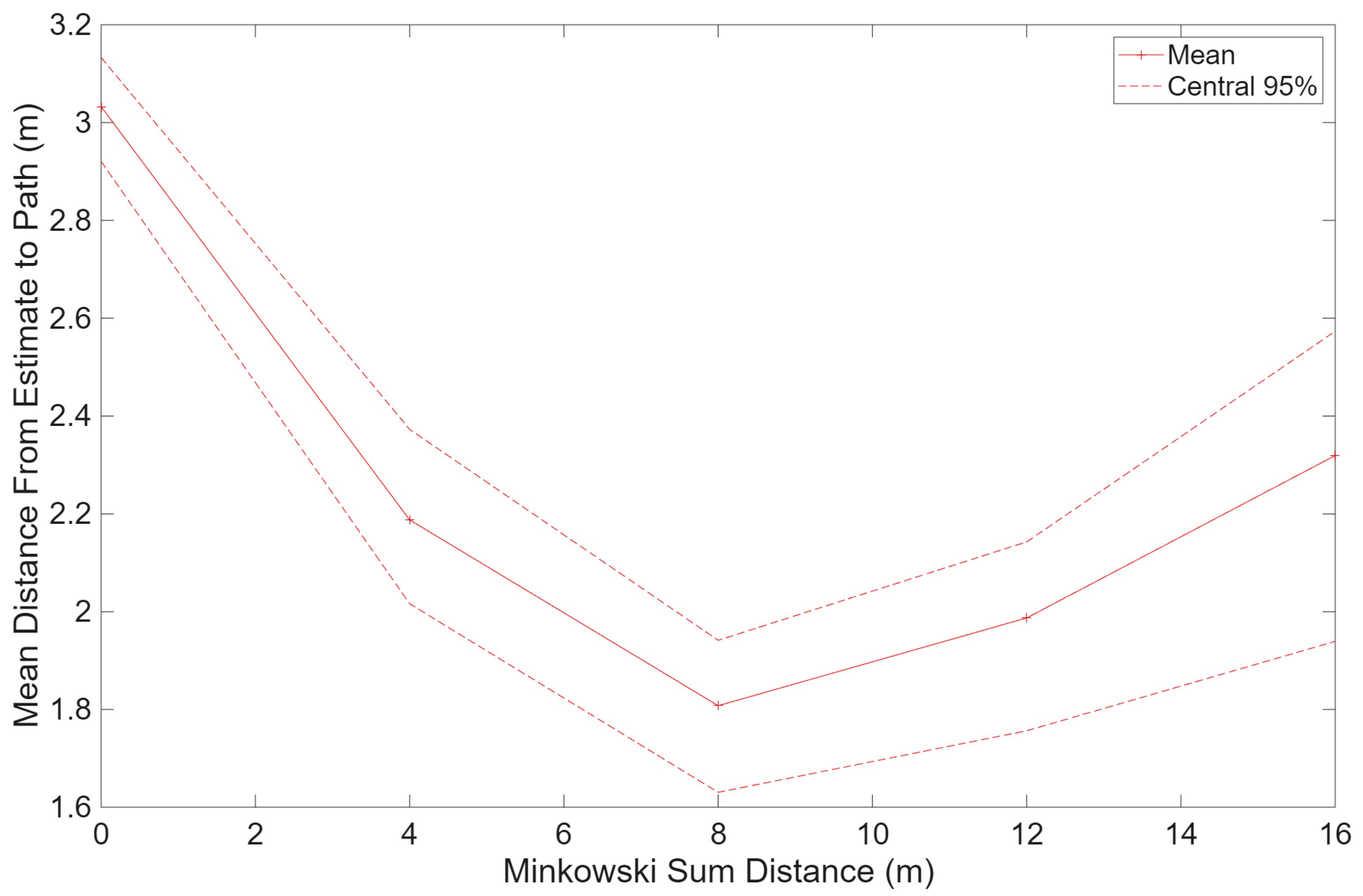
- Using the exact boundaries of the known movement space for the map does not provide optimal performance—instead, the map of this space should be inflated by a short distance to obtain the best performance.
Abstract
1. Introduction
- (1)
- The formulation and testing of generalised IMU-only dead reckoning as a constraint-only particle filtering problem without external observations, relying solely on a map and knowledge of human physiology.
- (2)
- An evaluation of how map constraint design influences localisation accuracy.
1.1. Sources of Error in IMU Dead Reckoning
1.1.1. Initial Position
1.1.2. Initial Velocity
1.1.3. Accelerometer Noise
1.1.4. Orientation Error
1.1.5. Accelerometer Bias
1.2. Error Correction
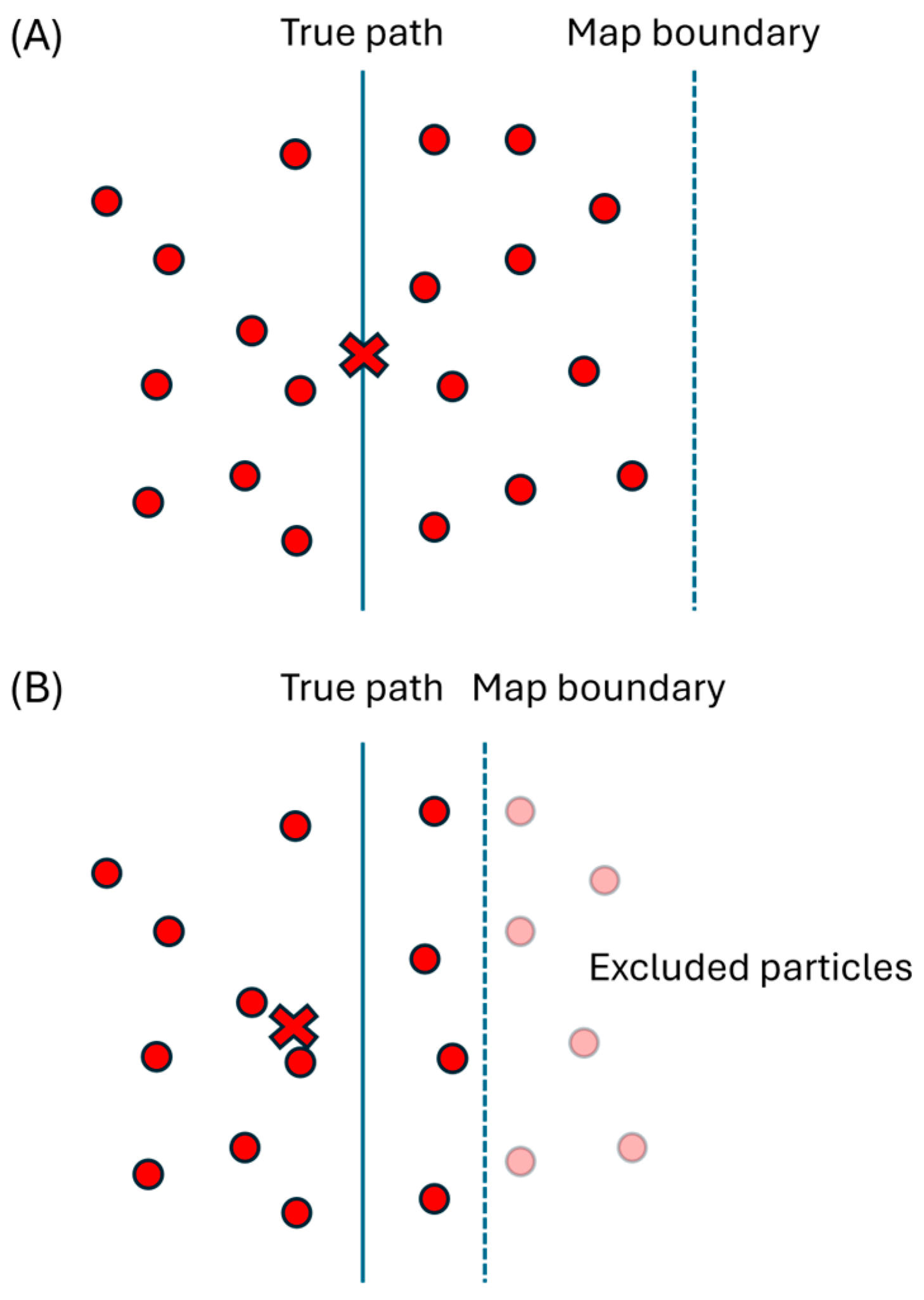
1.2.1. Map of the Space
1.2.2. Velocity Constraints
2. Materials and Methods
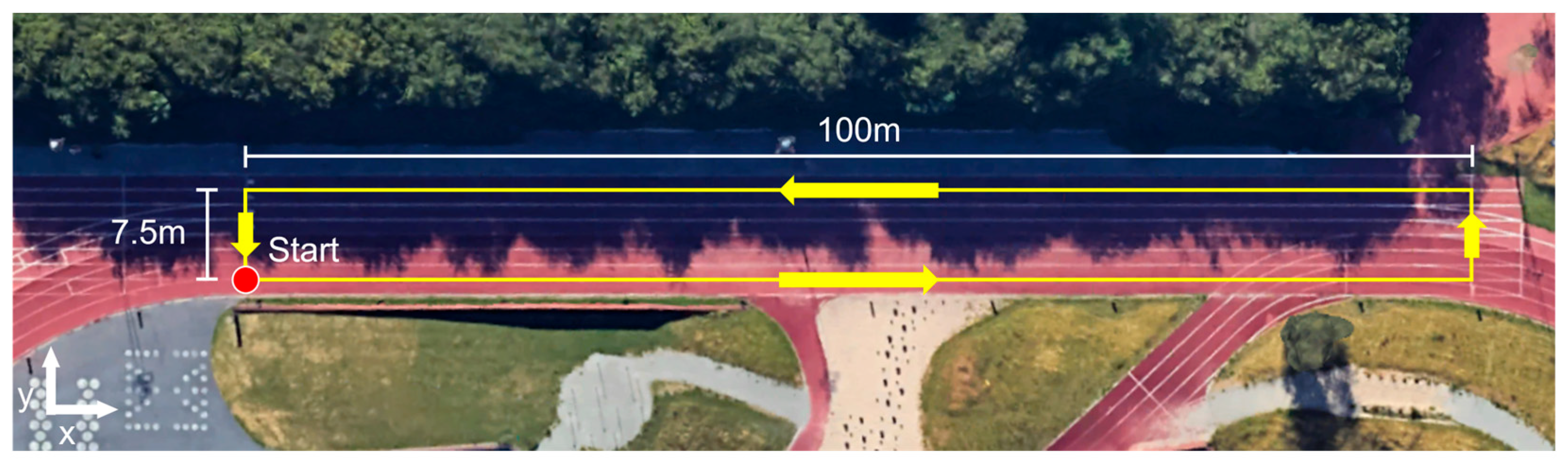
2.1. Data Collection
2.2. Particle Filter
2.2.1. Setup
2.2.2. Formal Filtering Problem
2.2.3. Implementation
2.3. Accuracy Metric
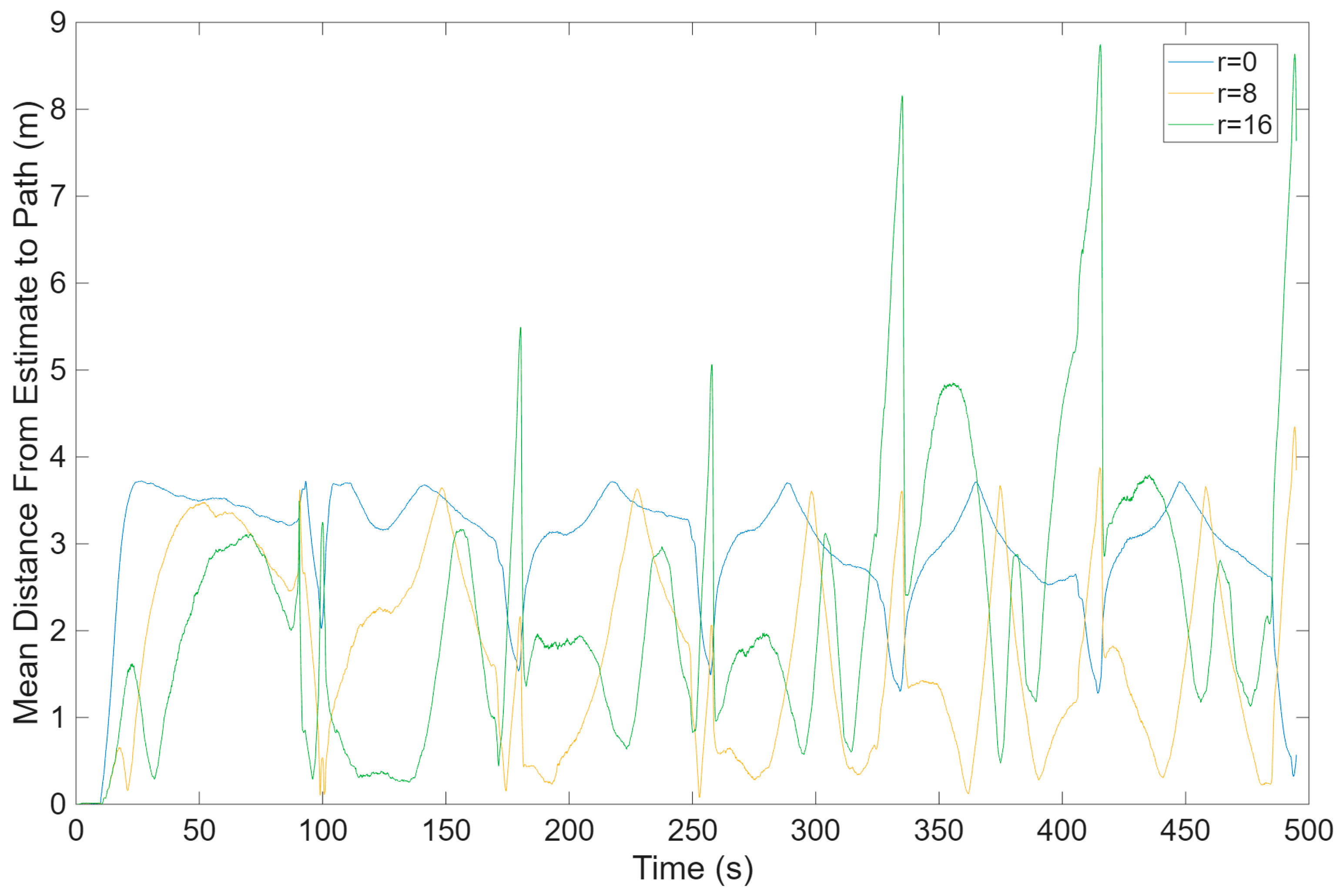
3. Results
4. Discussion
4.1. Limitations of the Study
4.2. Suggestions for Future Work
4.2.1. Reduce Sensor Error
4.2.2. Use More Sensors
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| IMU | Inertial Measurement Unit. |
| HMI | Human Machine Interface. |
Appendix A. Calibration Results


References
- Hou, X.; Bergmann, J. Pedestrian Dead Reckoning with Wearable Sensors: A Systematic Review. IEEE Sens. J. 2021, 21, 143–152. [Google Scholar] [CrossRef]
- Choi, J.-H.; Park, S.-Y.; Shin, D.-K.; Shin, D.-I. Real-Time Human Tracker Based on Location and Motion Recognition of User for Smart Home. KIPS Trans. Part A 2009, 16, 209–216. [Google Scholar] [CrossRef]
- Russell, J.; Bergmann, J. A Systematic Literature Review of Intent Sensing for Control of Medical Devices. IEEE Trans. Med. Robot. Bionics 2022, 4, 118–129. [Google Scholar] [CrossRef]
- Fu, Q.; Armstrong, T.; Shih, A. Evaluation of Smartwatch Inertia Measurement Unit (IMU) for Studying Human Movements: Volume VII: Ergonomics in Design, Design for All, Activity Theories for Work Analysis and Design, Affective Design. In Proceedings of the 20th Congress of the International Ergonomics Association (IEA 2018); Springer: Cham, Switzerland, 2019; pp. 1154–1159. [Google Scholar]
- Gastaldi, L.; Digo, E. Recent Advance and Application of Wearable Inertial Sensors in Motion Analysis. Sensors 2025, 25, 818. [Google Scholar] [CrossRef] [PubMed]
- Luo, Q.; Yu, M.; Yan, X.; Zhou, Z.; Wang, C.; Liu, B. A Geomagnetic/Odometry Integrated Localization Method for Differential Robot Using Real-Time Sequential Particle Filter. Sensors 2024, 24, 2120. [Google Scholar] [CrossRef] [PubMed]
- Durrant-Whyte, H.; Bailey, T. Simultaneous Localization and Mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; The MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Lu, C.; Uchiyama, H.; Thomas, D.; Shimada, A.; Taniguchi, R. Indoor Positioning System Based on Chest-Mounted IMU. Sensors 2019, 19, 420. [Google Scholar] [CrossRef] [PubMed]
- Ojeda, L.; Borenstein, J. Non-GPS Navigation for Security Personnel and First Responders. J. Navig. 2007, 60, 391–407. [Google Scholar] [CrossRef]
- Klein, I. Pedestrian Inertial Navigation: An Overview of Model and Data-Driven Approaches. Results Eng. 2025, 25, 104077. [Google Scholar] [CrossRef]
- Hou, X.; Bergmann, J.H.M. HINNet: Inertial Navigation with Head-Mounted Sensors Using a Neural Network. Eng. Appl. Artif. Intell. 2023, 123, 106066. [Google Scholar] [CrossRef]
- Wu, L.; Guo, S.; Han, L.; Anil Baris, C. Indoor Positioning Method for Pedestrian Dead Reckoning Based on Multi-Source Sensors. Measurement 2024, 229, 114416. [Google Scholar] [CrossRef]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Davidson, P.; Piche, R. A Survey of Selected Indoor Positioning Methods for Smartphones. IEEE Commun. Surv. Tutor. 2017, 19, 1347–1370. [Google Scholar] [CrossRef]
- Ai, M.; Hokmabadi, I.A.S.; Zhao, X. A Novel Smartphone PDR Framework Based on Map-Aided Adaptive Particle Filter with a Reduced State Space. ISPRS Int. J. Geo-Inf. 2025, 14, 476. [Google Scholar] [CrossRef]
- Štuhec, S.; Planjšek, P.; Čoh, M.; Mackala, K. Multicomponent Velocity Measurement for Linear Sprinting: Usain Bolt’s 100 m World-Record Analysis. Bioengineering 2023, 10, 1254. [Google Scholar] [CrossRef] [PubMed]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology; Institution of Engineering & Technology: Stevenage, UK, 2005. [Google Scholar]
- Fleisig, G.S.; Barrentine, S.W.; Escamilla, R.F.; Andrews, J.R. Biomechanics of Overhand Throwing with Implications for Injuries. Sports Med. 1996, 21, 421–437. [Google Scholar] [CrossRef] [PubMed]
- Donno, L.; Monoli, C.; Frigo, C.A.; Galli, M. Forward and Backward Walking: Multifactorial Characterization of Gait Parameters. Sensors 2023, 23, 4671. [Google Scholar] [CrossRef] [PubMed]
- Spiteri, T.; Nimphius, S.; Hart, N.H.; Specos, C.; Sheppard, J.M.; Newton, R.U. Contribution of Strength Characteristics to Change of Direction and Agility Performance in Female Basketball Athletes. J. Strength Cond. Res. 2014, 28, 2415–2423. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Xing, L.; Xiong, Z.; Ding, Y.; Sun, Y.; Shi, C. An Improved Pedestrian Navigation Method Based on the Combination of Indoor Map Assistance and Adaptive Particle Filter. Remote Sens. 2022, 14, 6282. [Google Scholar] [CrossRef]
- Movella Inc. Movella DOT User Manual. Available online: https://www.movella.com/hubfs/Xsens%20DOT%20User%20Manual-3.pdf (accessed on 12 April 2026).
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Dellaert, F.; Fox, D.; Burgard, W.; Thrun, S. Monte Carlo Localization for Mobile Robots. In Proceedings 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Detroit, MI, USA, 10–15 May 1999; IEEE: New York, NY, USA, 1999; Volume 2, pp. 1322–1328. [Google Scholar]
- Fox, D. Adapting the Sample Size in Particle Filters Through KLD-Sampling. Int. J. Rob. Res. 2003, 22, 985–1003. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.
Share and Cite
Russell, J.; Bergmann, J.H.M. Human Dead Reckoning Using a Particle Filter and Map Constraints. Sensors 2026, 26, 3500. https://doi.org/10.3390/s26113500
Russell J, Bergmann JHM. Human Dead Reckoning Using a Particle Filter and Map Constraints. Sensors. 2026; 26(11):3500. https://doi.org/10.3390/s26113500
Chicago/Turabian StyleRussell, Joseph, and Jeroen H. M. Bergmann. 2026. "Human Dead Reckoning Using a Particle Filter and Map Constraints" Sensors 26, no. 11: 3500. https://doi.org/10.3390/s26113500
APA StyleRussell, J., & Bergmann, J. H. M. (2026). Human Dead Reckoning Using a Particle Filter and Map Constraints. Sensors, 26(11), 3500. https://doi.org/10.3390/s26113500