
Non-Fragile Estimation for Nonlinear Delayed Complex Networks with Random Couplings Using Binary Encoding Schemes


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Problem Formulation and Preliminaries
2.1. The Mathematical Description of Network Nodes
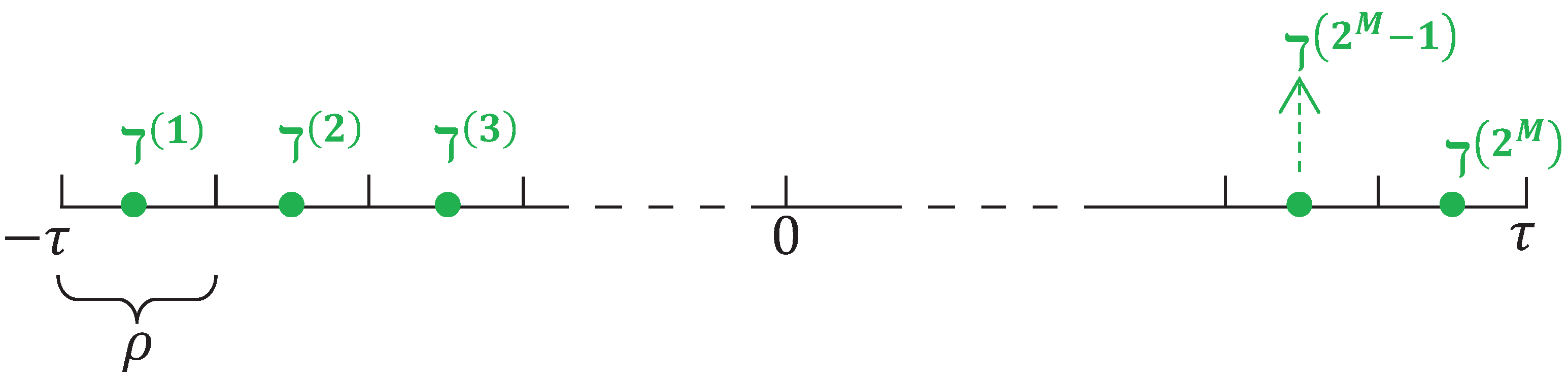
2.2. The Adoption of BESs
2.3. The Model Establishment of Non-Fragile State Estimator
3. Main Results
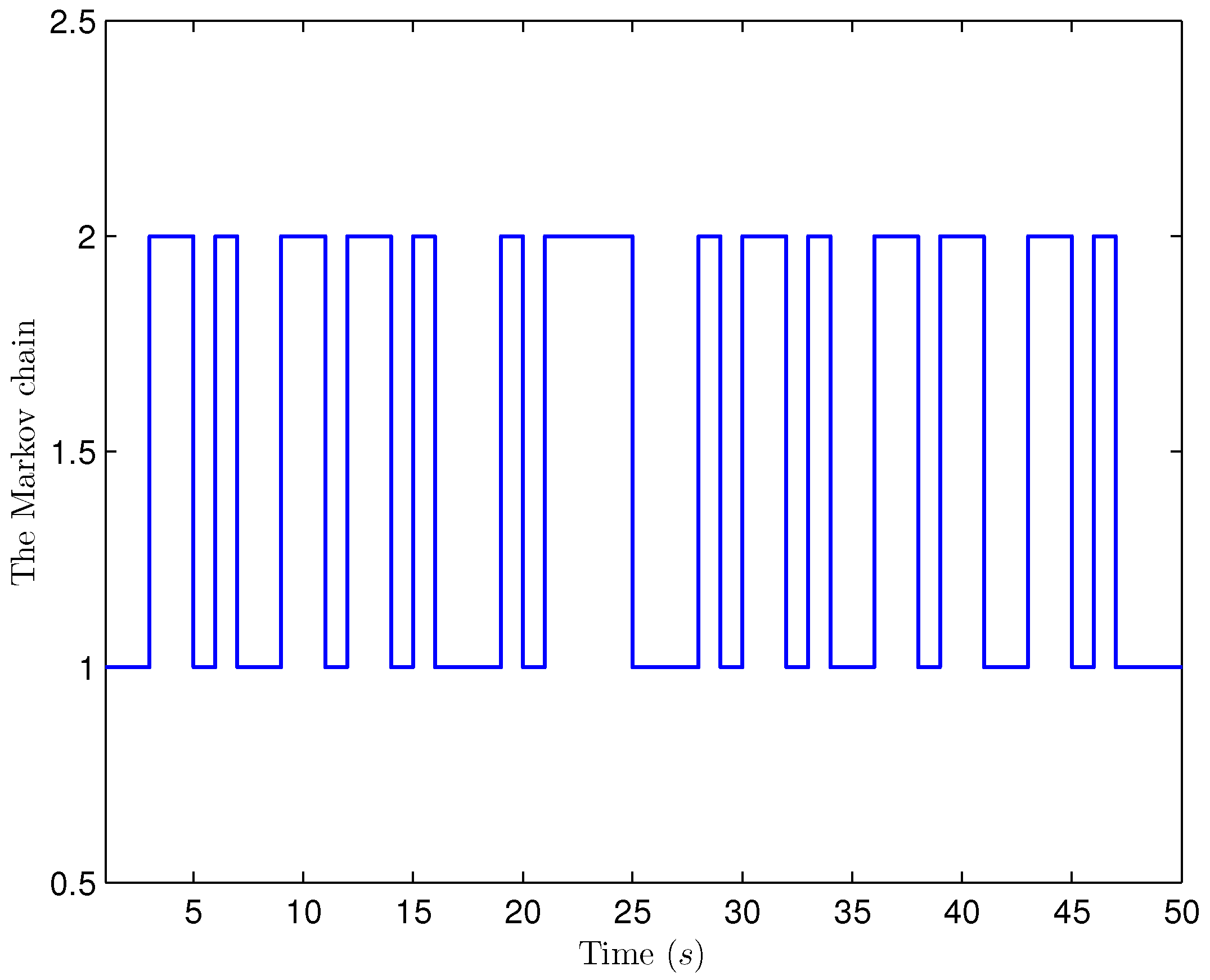
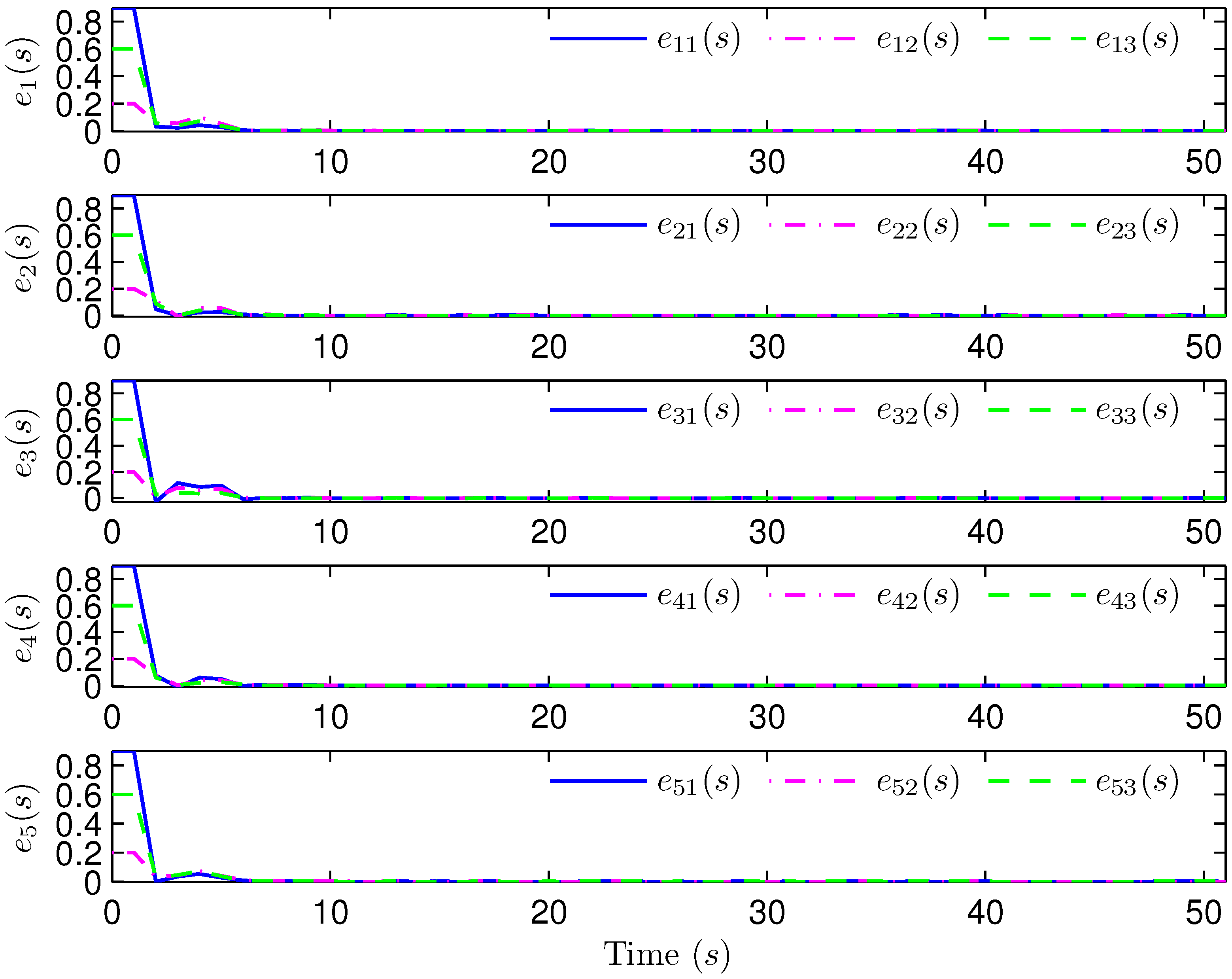
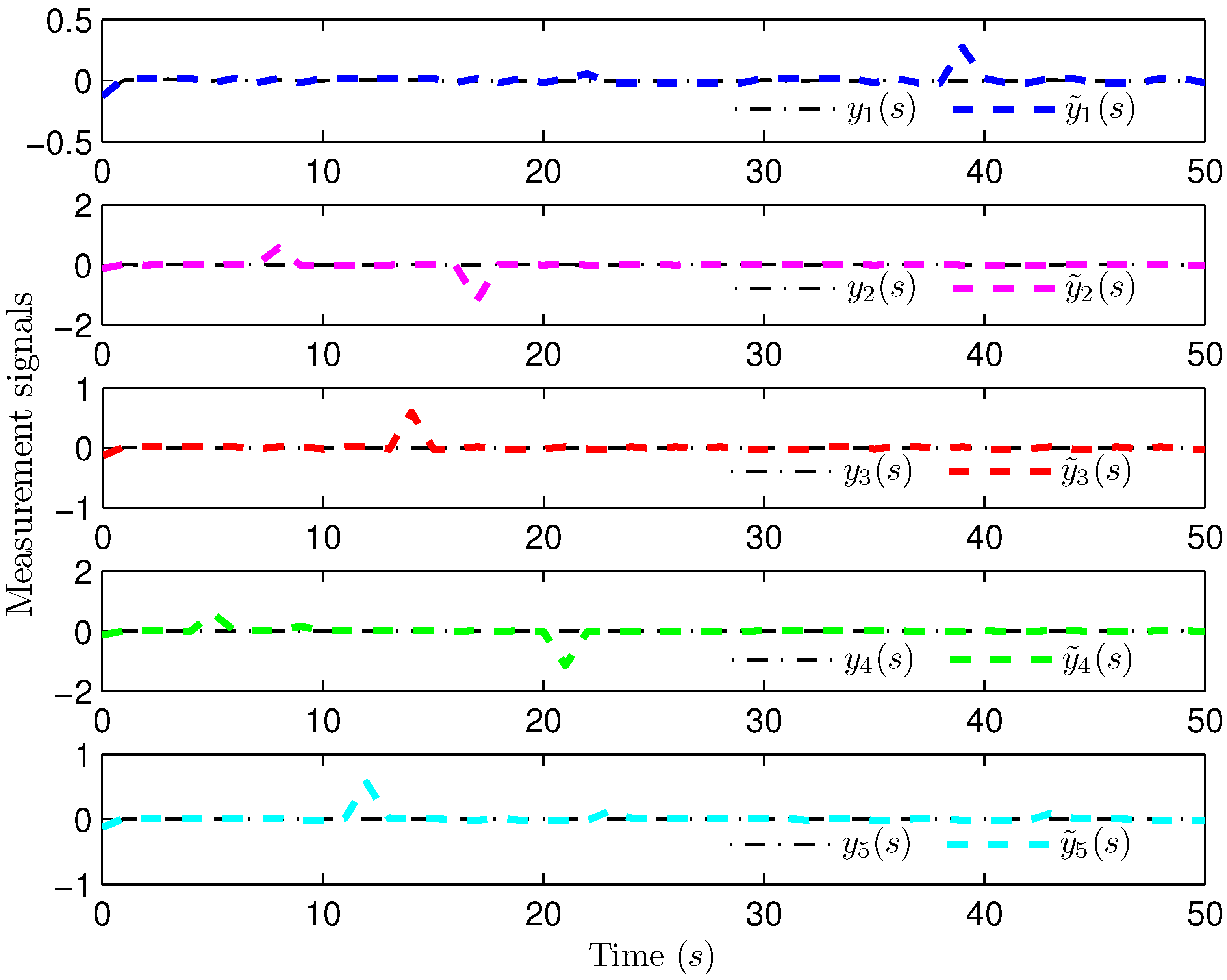
4. Simulation Examples
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CNs | Complex networks. |
| SE | State estimation. |
| NCSs | Networked control systems. |
| BES | Binary encoding scheme. |
| BBS | Binary bit string. |
| BSC | Binary symmetric channel. |
| BER | Bit error rate. |
| EUB | Exponentially ultimately bounded. |
References
- Mei, Z.; Oguchi, T. A real-time identification method of network structure in complex network systems. Int. J. Syst. Sci. 2023, 54, 549–564. [Google Scholar] [CrossRef]
- Shen, Y.; Wang, Z.; Dong, H.; Liu, H.; Chen, Y. Set-membership state estimation for multirate nonlinear complex networks under FlexRay protocols: A neural-network-based approach. IEEE Trans. Neural Netw. Learn. Syst. 2025, 36, 4922–4933. [Google Scholar] [CrossRef]
- Shang, R.; Dong, H.; Wang, C.; Chen, S.; Sun, T.; Guan, C. Imbalanced data augmentation for pipeline fault diagnosis: A multi-generator switching adversarial network. Control Eng. Pract. 2024, 144, 105839. [Google Scholar] [CrossRef]
- Shen, H.; Hu, X.; Wu, X.; He, S.; Wang, J. Generalized dissipative state estimation of singularly perturbed switched complex dynamic networks with persistent dwell-time mechanisms. IEEE Trans. Syst. Man, Cybern. Syst. 2022, 52, 1795–1806. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Z.; Ma, L.; Alsaadi, F.E. A partial-nodes-based information fusion approach to state estimation for discrete-time delayed stochastic complex networks. Inf. Fusion 2019, 49, 240–248. [Google Scholar] [CrossRef]
- Ma, X.; Zhou, H.; Li, Z. On the resilience of modern power systems: A complex network perspective. Renew. Sustain. Energy Rev. 2021, 152, 111646. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, J.-A.; Zhang, J.; Li, M.; Zhao, Z.; Wen, X. Fixed-time event-triggered pinning synchronization of complex network via aperiodically intermittent control. Neurocomputing 2024, 614, 128818. [Google Scholar] [CrossRef]
- Wan, X.; Wang, Z.; Han, Q.; Wu, M. Finite-time H∞ state estimation for discrete time-delayed genetic regulatory networks under stochastic communication protocols. IEEE Trans. Circuits Syst. Regul. Pap. 2018, 65, 3481–3491. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, J.; Wang, Z.; Wu, L. Interval type-2 FNN-based quantized tracking control for hypersonic flight vehicles with prescribed performance. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 51, 1981–1993. [Google Scholar] [CrossRef]
- Zhao, L.-H.; Wen, S.; Xu, M.; Shi, K.; Zhu, S.; Huang, T. PID control for output synchronization of multiple output coupled complex networks. IEEE Trans. Netw. Sci. Eng. 2022, 9, 1553–1566. [Google Scholar] [CrossRef]
- Wu, Y.; Shen, B.; Ahn, C.K.; Li, W. Intermittent dynamic event-triggered control for synchronization of stochastic complex networks. IEEE Trans. Circuits Syst. Regul. Pap. 2021, 68, 2639–2650. [Google Scholar] [CrossRef]
- Huang, C.; Cao, J.; Wen, F.; Yang, X. Stability analysis of SIR model with distributed delay on complex networks. PLoS ONE 2016, 11, e0158813. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Zhou, X.; Li, B. Existence and global exponential stability of Weyl almost automorphic solution in finite dimensional distributions for SDINNs. Int. J. Syst. Sci. 2025, 56, 561–581. [Google Scholar] [CrossRef]
- Zhang, R.; Liu, H.; Liu, Y.; Tan, H. Dynamic event-triggered state estimation for discrete-time delayed switched neural networks with constrained bit rate. Syst. Sci. Control Eng. 2024, 12, 2334304. [Google Scholar] [CrossRef]
- Hou, N.; Wang, Z.; Dong, H.; Hu, J.; Liu, X. Sensor fault estimation for nonlinear complex networks with time delays under saturated innovations: A binary encoding scheme. IEEE Trans. Netw. Sci. Eng. 2022, 9, 4171–4183. [Google Scholar] [CrossRef]
- Hu, J.; Wang, Z.; Liu, G.-P.; Zhang, H. Variance-constrained recursive state estimation for time-varying complex networks with quantized measurements and uncertain inner coupling. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 1955–1967. [Google Scholar] [CrossRef]
- Feng, S.; Li, X.; Zhang, S.; Jian, Z.; Duan, H.; Wang, Z. A review: State estimation based on hybrid models of Kalman filter and neural network. Syst. Sci. Control Eng. 2023, 11, 2173682. [Google Scholar] [CrossRef]
- Shen, Y.; Wang, Z.; Dong, H. Minimum-variance state and fault estimation for multirate systems with dynamical bias. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 2361–2365. [Google Scholar] [CrossRef]
- Li, Q.; Wang, Z.; Sheng, W.; Alsaadi, F.E.; Alsaadi, F.E. Dynamic event-triggered mechanism for H∞ non-fragile state estimation of complex networks under randomly occurring sensor saturations. Inf. Sci. 2020, 509, 304–316. [Google Scholar] [CrossRef]
- Liu, D.; Wang, Z.; Liu, Y.; Alsaadi, F.E.; Alsaadi, F.E. Recursive state estimation for stochastic complex networks under round-robin communication protocol: Handling packet disorders. IEEE Trans. Netw. Sci. Eng. 2021, 8, 2455–2468. [Google Scholar] [CrossRef]
- Li, X.; Zhang, P.; Dong, H. A robust covert attack strategy for a class of uncertain cyber-physical systems. IEEE Trans. Autom. Control 2024, 69, 1983–1990. [Google Scholar] [CrossRef]
- Ding, L.; Sun, W. Predefined time fuzzy adaptive control of switched fractional-order nonlinear systems with input saturation. Int. J. Netw. Dyn. Intell. 2023, 2, 100019. [Google Scholar] [CrossRef]
- Wang, Y.-A.; Shen, B.; Zou, L.; Han, Q.-L. A survey on recent advances in distributed filtering over sensor networks subject to communication constraints. Int. J. Netw. Dyn. Intell. 2023, 2, 100007. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, H.-J.; Tan, H.-L. An overview of filtering for sampled-data systems under communication constraints. Int. J. Netw. Dyn. Intell. 2023, 2, 100011. [Google Scholar] [CrossRef]
- Gao, Y.; Xiao, F.; Liu, J.; Wang, R. Distributed soft fault detection for interval type-2 fuzzy-model-based stochastic systems with wireless sensor networks. IEEE Trans. Ind. Inform. 2019, 15, 334–347. [Google Scholar] [CrossRef]
- Wang, C.; Wang, Z.; Dong, H.; Lauria, S.; Liu, W.; Wang, Y.; Fadzil, F.; Liu, H. Fusionformer: A novel adversarial transformer utilizing fusion attention for multivariate anomaly detection. IEEE Trans. Neural Netw. Learn. Syst. 2025; in press. [Google Scholar] [CrossRef]
- Li, H.; Li, X.; Sun, Y.; Dong, H.; Xu, G. First-arrival picking for out-of-distribution noisy data: A cost-effective transfer learning method with tens of samples. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–13. [Google Scholar] [CrossRef]
- Song, J.; Zhou, S.; Niu, Y.; Cao, Z.; He, S. Anti-disturbance control for hidden Markovian jump systems: Asynchronous disturbance observer approach. IEEE Trans. Autom. Control 2023, 68, 6982–6989. [Google Scholar] [CrossRef]
- Wang, X.F. Complex networks: Topology, dynamics and synchronization. Int. J. Bifurc. Chaos 2002, 12, 885–916. [Google Scholar] [CrossRef]
- Gao, P.; Jia, C.; Zhou, A. Encryption-decryption-based state estimation for nonlinear complex networks subject to coupled perturbation. Syst. Sci. Control Eng. 2024, 12, 2357796. [Google Scholar] [CrossRef]
- Yang, X.; Cao, J.; Lu, J. Synchronization of Markovian coupled neural networks with nonidentical node-delays and random coupling strengths. IEEE Trans. Neural Netw. Learn. Syst. 2011, 60–71. [Google Scholar] [CrossRef]
- Gao, C.; Guo, B.; Xiao, Y.; Bao, J. Aperiodically synchronization of multi-links delayed complex networks with semi-Markov jump and their numerical simulations to single-link robot arms. Neurocomputing 2024, 575, 127286. [Google Scholar] [CrossRef]
- Hu, J.; Wang, Z.; Liu, G.-P. Delay compensation-based state estimation for time-varying complex networks with incomplete observations and dynamical bias. IEEE Trans. Cybern. 2022, 52, 12071–12083. [Google Scholar] [CrossRef] [PubMed]
- Shen, B.; Wang, Z.; Ding, D.; Shu, H. H∞ state estimation for complex networks with uncertain inner coupling and incomplete measurements. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 2027–2037. [Google Scholar] [CrossRef]
- Leung, H.; Seneviratne, C.; Xu, M. A novel statistical model for distributed estimation in wireless sensor networks. IEEE Trans. Signal Process. 2015, 63, 3154–3164. [Google Scholar] [CrossRef]
- Huo, N.; Shen, D. Encoding-decoding mechanism-based finite-level quantized iterative learning control with random data dropouts. IEEE Trans. Autom. Sci. Eng. 2019, 17, 1343–1360. [Google Scholar] [CrossRef]
- Yang, F.; Li, J.; Dong, H.; Shen, Y. Proportional-integral-type estimator design for delayed recurrent neural networks under encoding-decoding mechanism. Int. J. Syst. Sci. 2022, 53, 2729–2741. [Google Scholar] [CrossRef]
- Zou, L.; Wang, Z.; Shen, B.; Dong, H. Secure recursive state estimation of networked systems against eavesdropping: A partial-encryption-decryption method. IEEE Trans. Autom. Control, 2024; in press. [Google Scholar] [CrossRef]
- Zou, L.; Wang, Z.; Shen, B.; Dong, H. Encryption-decryption-based state estimation with multirate measurements against eavesdroppers: A recursive minimum-variance approach. IEEE Trans. Autom. Control 2023, 68, 8111–8118. [Google Scholar] [CrossRef]
- Zou, L.; Wang, Z.; Shen, B.; Dong, H. Recursive state estimation in relay channels with enhanced security against eavesdropping: An Innovative encryption-decryption framework. Automatica 2025, 174, 112159. [Google Scholar] [CrossRef]
- Liang, X.; Xu, J. Control for networked control systems with remote and local controllers over unreliable communication channel. Automatica 2018, 98, 86–94. [Google Scholar] [CrossRef]
- Li, J.; Wang, Z.; Dong, H.; Fei, W. Delay-distribution-dependent state estimation for neural networks under stochastic communication protocol with uncertain transition probabilities. Neural Netw. 2020, 130, 143–151. [Google Scholar] [CrossRef]
- Jin, Y.; Ma, X.; Meng, X.; Chen, Y. Distributed fusion filtering for cyber-physical systems under Round-Robin protocol: A mixed H2/H∞ framework. Int. J. Syst. Sci. 2023, 54, 1661–1675. [Google Scholar] [CrossRef]
- Geng, H.; Wang, Z.; Chen, Y.; Yi, X.; Cheng, Y. Variance-constrained filtering fusion for nonlinear cyber-physical systems with the denial-of-service attacks and stochastic communication protocol. IEEE/CAA J. Autom. Sin. 2022, 9, 978–989. [Google Scholar] [CrossRef]
- Shen, Y.; Wang, Z.; Shen, B.; Dong, H. Outlier-resistant recursive filtering for multisensor multirate networked systems under weighted try-once-discard protocol. IEEE Trans. Cybern. 2020, 51, 4897–4908. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Dong, H.; Wang, Z.; Han, F. Set-membership filtering for state-saturated systems with mixed time-delays under weighted try-once-discard protocol. IEEE Trans. Circuits Syst. II Express Briefs 2018, 66, 312–316. [Google Scholar] [CrossRef]
- Hu, J.; Chen, W.; Wu, Z.; Chen, D.; Yi, X. Design of protocol-based finite-time memory fault detection scheme with circuit system application. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 3110–3123. [Google Scholar] [CrossRef]
- Han, F.; Wang, Z.; Dong, H.; Alsaadi, F.E.; Alharbi, K.H. A local approach to distributed H∞-consensus state estimation over sensor networks under hybrid attacks: Dynamic event-triggered scheme. IEEE Trans. Signal Inf. Process. Over Netw. 2022, 8, 556–570. [Google Scholar] [CrossRef]
- Wu, W.; Yan, H.; Wang, Y.; Li, Z.; Wang, M. Fixed time cluster consensus for nonlinear multiagent systems by double dynamic event-triggered mechanisms. Int. J. Syst. Sci. 2024, 55, 3322–3336. [Google Scholar] [CrossRef]
- Hu, J.; Hu, Z.; Caballero-Aguila, R.; Chen, C.; Fan, S.; Yi, X. Distributed resilient fusion filtering for nonlinear systems with multiple missing measurements via dynamic event-triggered mechanism. Inf. Sci. 2023, 637, 118950. [Google Scholar] [CrossRef]
- Wang, W.; Ma, L.; Rui, Q.; Gao, C. A survey on privacy-preserving control and filtering of networked control systems. Int. J. Syst. Sci. 2024, 55, 2269–2288. [Google Scholar] [CrossRef]
- Li, J.; Wang, Z.; Dong, H.; Yi, X. Outlier-resistant observer-based control for a class of networked systems under encoding-decoding mechanism. IEEE Syst. J. 2020, 16, 922–932. [Google Scholar] [CrossRef]
- Gao, Y.; Hu, J.; Chi, K.; Jia, C.; Qi, J. A variance-constrained method to encoding-decoding H∞ state estimation for memristive neural networks with energy harvesting sensor. Neurocomputing 2024, 579, 127448. [Google Scholar] [CrossRef]
- Jin, F.; Ma, L.; Zhao, C.; Liu, Q. A quantization-coding scheme with variable data rates for cyber-physical systems under DoS attacks. Syst. Sci. Control Eng. 2024, 12, 2348690. [Google Scholar] [CrossRef]
- Li, W.; Hou, N.; Yang, F.; Bu, X.; Sun, L. Finite-horizon variance-constrained H∞ estimation for complex networks subject to dynamical bias using binary encoding schemes. IEEE Access 2023, 11, 142589–142600. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, Z.; Dong, H.; Jiang, C. Remote estimation for energy harvesting systems under multiplicative noises: A binary encoding scheme with probabilistic bit flips. IEEE Trans. Autom. Control 2022, 68, 343–354. [Google Scholar] [CrossRef]
- Wen, P.; Dong, H.; Huo, F.; Li, J.; Lu, X. Observer-based PID control for actuator-saturated systems under binary encoding scheme. Neurocomputing 2022, 99, 54–62. [Google Scholar] [CrossRef]
- Chen, W.; Wang, Z.; Ding, D.; Dong, H. Consensusability of discrete-time multi-agent systems under binary encoding with bit errors. Automatica 2021, 133, 109867. [Google Scholar] [CrossRef]
- Wang, S.; Wang, Z.; Dong, H.; Chen, Y. A dynamic event-triggered approach to recursive nonfragile filtering for complex networks with sensor saturations and switching topologies. IEEE Trans. Cybern. 2022, 52, 11041–11054. [Google Scholar] [CrossRef]
- Zhao, D.; Wang, Z.; Wei, G.; Liu, X. Nonfragile H∞ state estimation for recurrent neural networks with time-varying delays: On proportional-integral observer design. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 3553–3565. [Google Scholar] [CrossRef]
- Xu, B.; Hu, X.; Li, S. Secure state estimation of memristive neural networks with dynamic self-triggered strategy subject to deception attacks. Neurocomputing 2024, 601, 128142. [Google Scholar] [CrossRef]
- Zhuang, J.; Peng, S.; Peng, H. Non-fragile exponential synchronisation of stochastic neural networks via aperiodic intermittent impulsive control. Int. J. Syst. Sci. 2024, 55, 1021–1036. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, Z.; Ding, D.; Dong, H.; Alsaadi, F.E.; Hayat, T. Nonfragile H∞ fuzzy filtering with randomly occurring gain variations and channel fadings. IEEE Trans. Fuzzy Syst. 2015, 24, 505–518. [Google Scholar] [CrossRef]
- Bu, X.; Dong, H.; Wang, Z.; Liu, H. Non-fragile distributed fault estimation for a class of nonlinear time-varying systems over sensor networks: The finite-horizon case. IEEE Trans. Signal Inf. Process. Over Netw. 2018, 5, 61–69. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, Z.; He, X.; Ghinea, G.; Alsaadi, F.E. A resilient approach to distributed filter design for time-varying systems under stochastic nonlinearities and sensor degradation. IEEE Trans. Signal Process. 2016, 65, 1300–1309. [Google Scholar] [CrossRef]
- Li, X.; Song, J.; Hou, N.; Dai, D.; Yang, F. Finite-horizon distributed set-membership filtering with dynamical bias and DoS attacks under binary encoding schemes. Inf. Sci. 2023, 641, 119084. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, Z. Moving-horizon estimation for linear dynamic networks with binary encoding schemes. IEEE Trans. Autom. Control 2020, 66, 1763–1770. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Z.; Liu, X. Global exponential stability of generalized recurrent neural networks with discrete and distributed delays. Neural Netw. 2006, 19, 667–675. [Google Scholar] [CrossRef]
- Cruz-Hernández, C.; Romero-Haros, N. Communicating via synchronized time-delay Chua’s circuits. Commun. Nonlinear Sci. Numer. Simul. 2008, 13, 645–659. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Z.; Yuan, Y.; Liu, W. Event-triggered partial-nodes-based state estimation for delayed complex networks with bounded distributed delays. IEEE Trans. Syst. Man Cybern. Syst. 2017, 49, 1088–1098. [Google Scholar] [CrossRef]
- Li, J.-Y.; Wang, Z.; Lu, R.; Xu, Y. Partial-nodes-based state estimation for complex networks with constrained bit rate. IEEE Trans. Netw. Sci. Eng. 2021, 8, 1887–1899. [Google Scholar] [CrossRef]
- Han, F.; Wang, Z.; Liu, H.; Dong, H.; Lu, G. Local design of distributed state estimators for linear discrete time-varying systems over binary sensor networks: A set-membership approach. IEEE Trans. Syst. Man, Cybern. Syst. 2024, 54, 5641–5654. [Google Scholar] [CrossRef]
- Hu, J.; Li, J.; Yan, H.; Liu, H. Optimized distributed filtering for saturated systems with amplify-and-forward relays over sensor networks: A dynamic event-triggered approach. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 17742–17753. [Google Scholar] [CrossRef] [PubMed]
- Song, J.; Wang, Y.-K.; Niu, Y.; Lam, H.-K.; He, S.; Liu, H. Periodic event-triggered terminal sliding mode speed control for networked PMSM system: A GA-optimized extended state observer approach. IEEE/ASME Trans. Mechatronics 2022, 27, 4153–4164. [Google Scholar] [CrossRef]
- Liang, X.; Xu, J.; Wang, H.; Zhang, H. Decentralized output-feedback control with asymmetric one-step delayed information. IEEE Trans. Autom. Control 2023, 68, 7871–7878. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, N.; Li, W.; Song, Y.; Chang, M.; Bu, X. Non-Fragile Estimation for Nonlinear Delayed Complex Networks with Random Couplings Using Binary Encoding Schemes. Sensors 2025, 25, 2880. https://doi.org/10.3390/s25092880
Hou N, Li W, Song Y, Chang M, Bu X. Non-Fragile Estimation for Nonlinear Delayed Complex Networks with Random Couplings Using Binary Encoding Schemes. Sensors. 2025; 25(9):2880. https://doi.org/10.3390/s25092880
Chicago/Turabian StyleHou, Nan, Weijian Li, Yanhua Song, Mengdi Chang, and Xianye Bu. 2025. "Non-Fragile Estimation for Nonlinear Delayed Complex Networks with Random Couplings Using Binary Encoding Schemes" Sensors 25, no. 9: 2880. https://doi.org/10.3390/s25092880
APA StyleHou, N., Li, W., Song, Y., Chang, M., & Bu, X. (2025). Non-Fragile Estimation for Nonlinear Delayed Complex Networks with Random Couplings Using Binary Encoding Schemes. Sensors, 25(9), 2880. https://doi.org/10.3390/s25092880