
A Novel FMCW Radar Scheme with Millimeter Motion Detection Capabilities Suitable for Cardio-Respiratory Monitoring




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Background
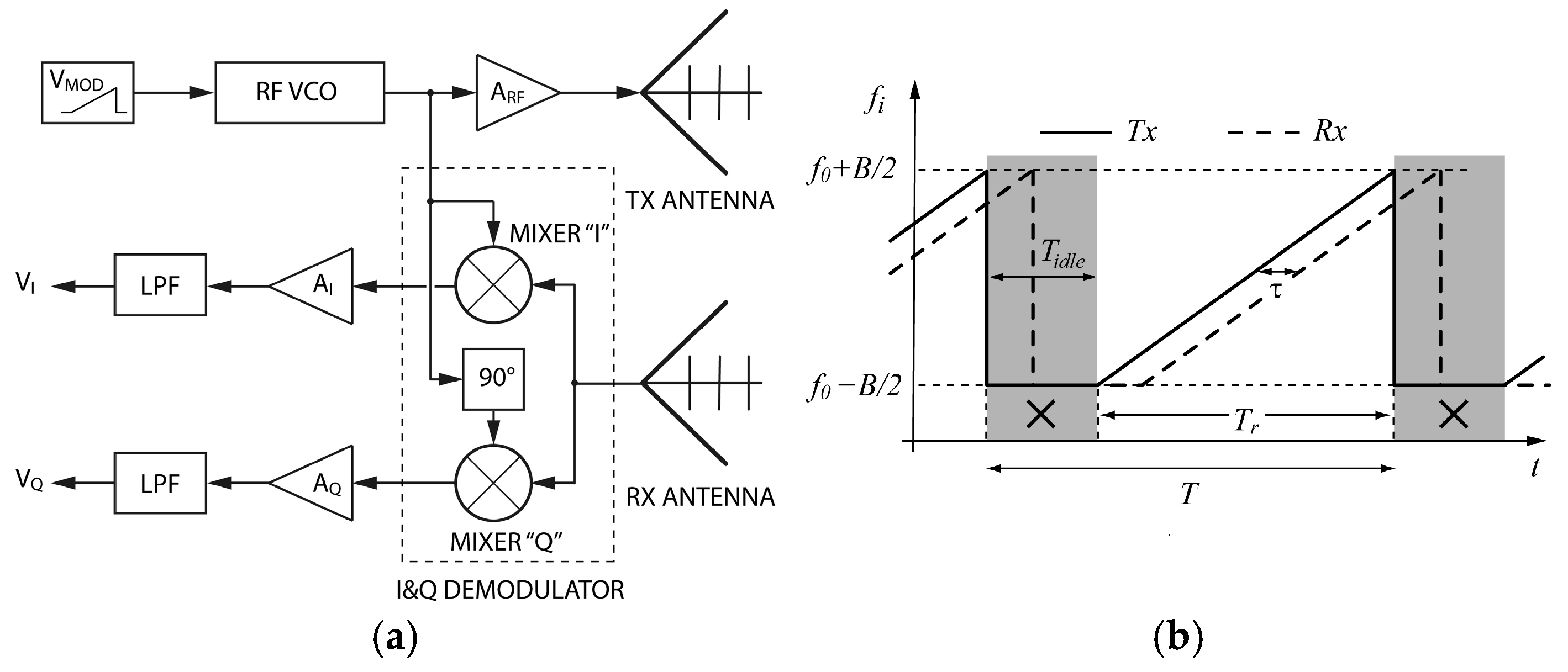
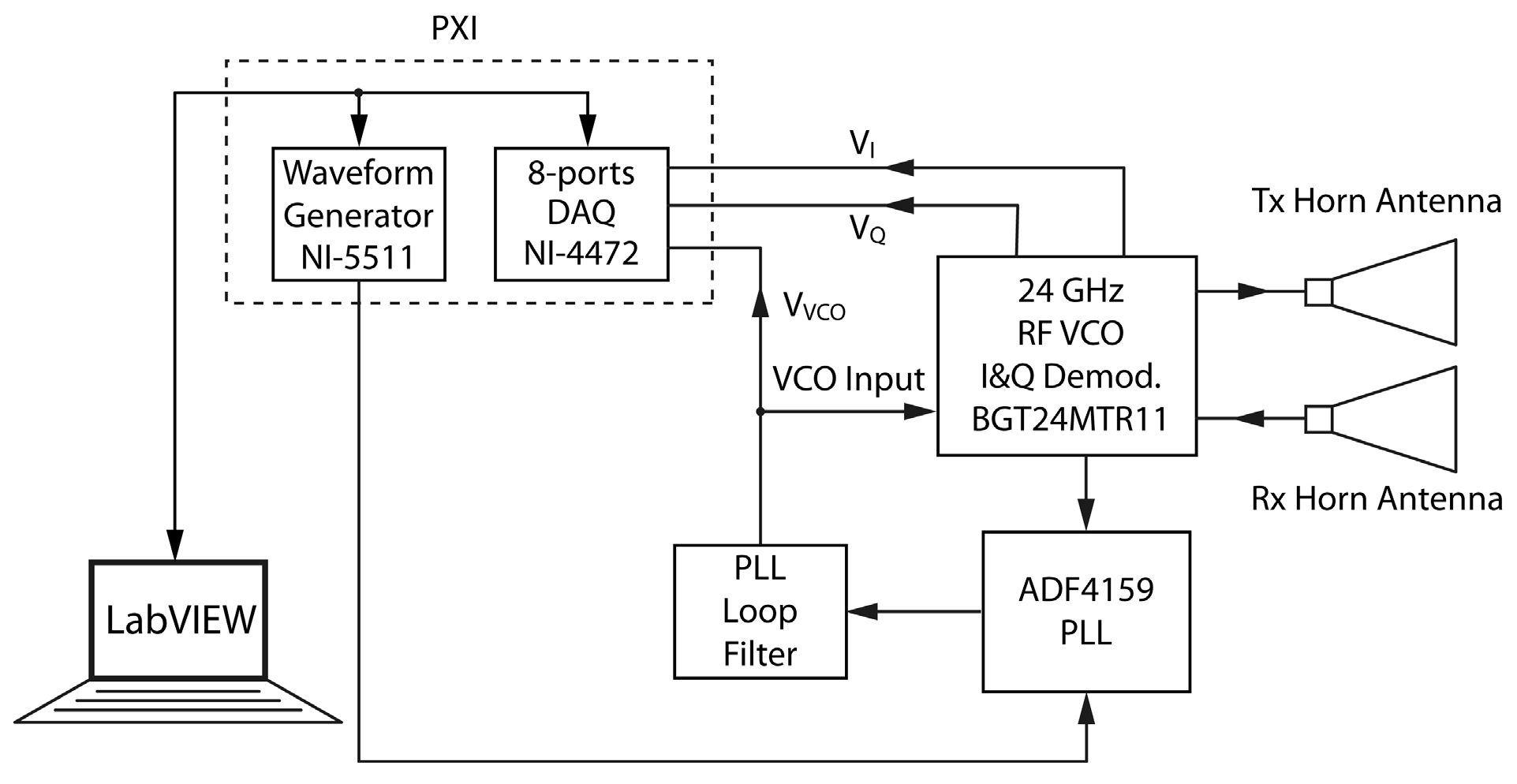
2.2. Sinusoidal Frequency-Modulated Continuous Wave (SFMCW) Radar System
3. Results
3.1. Numerical Results
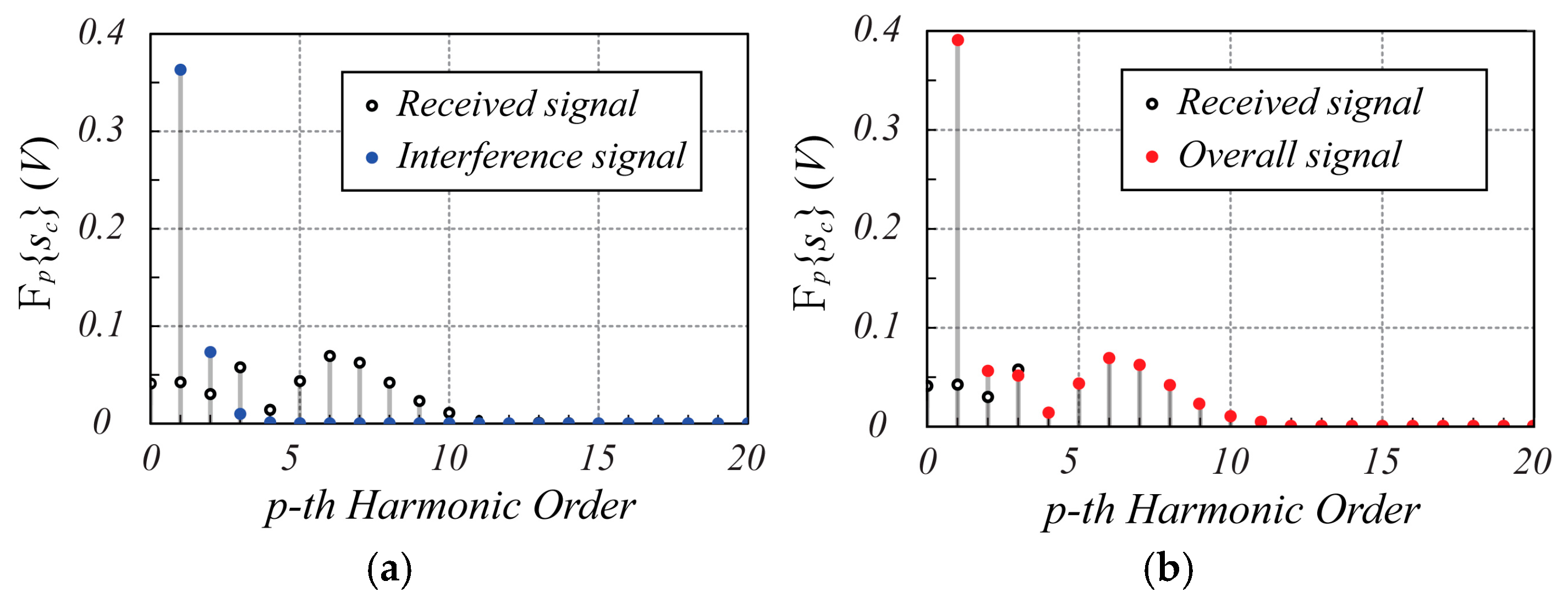
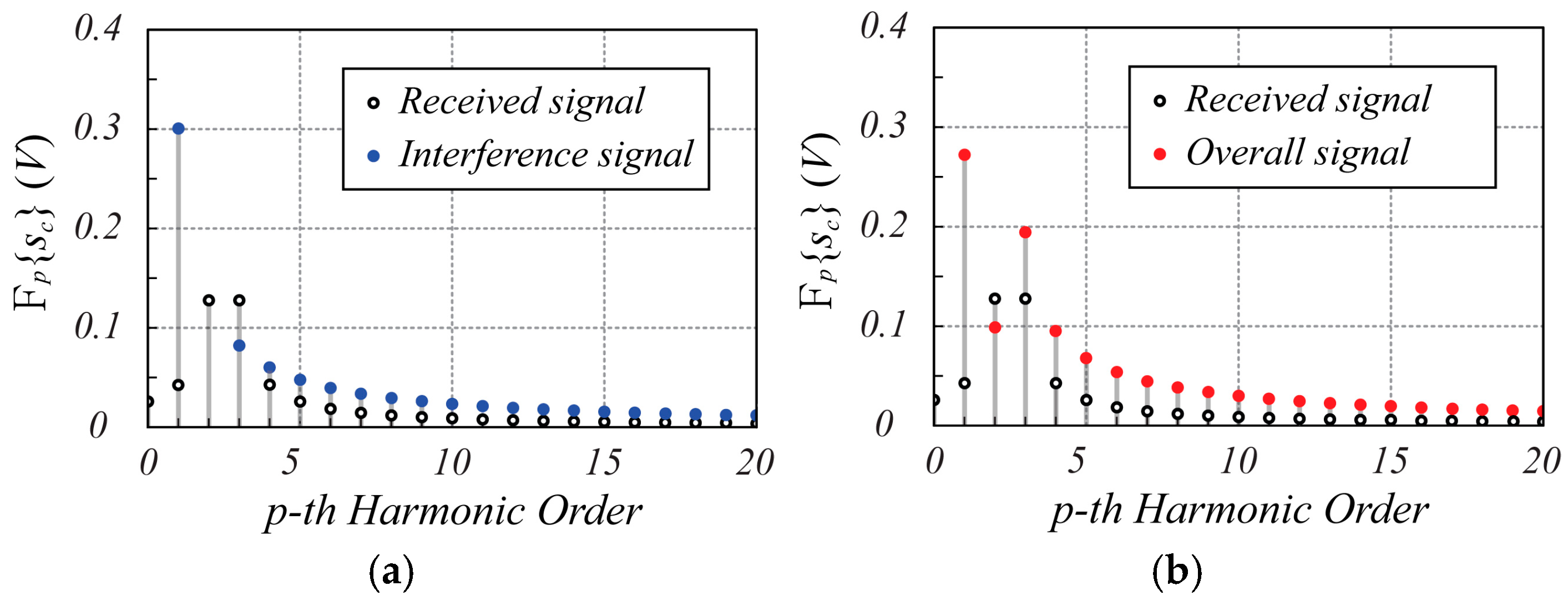
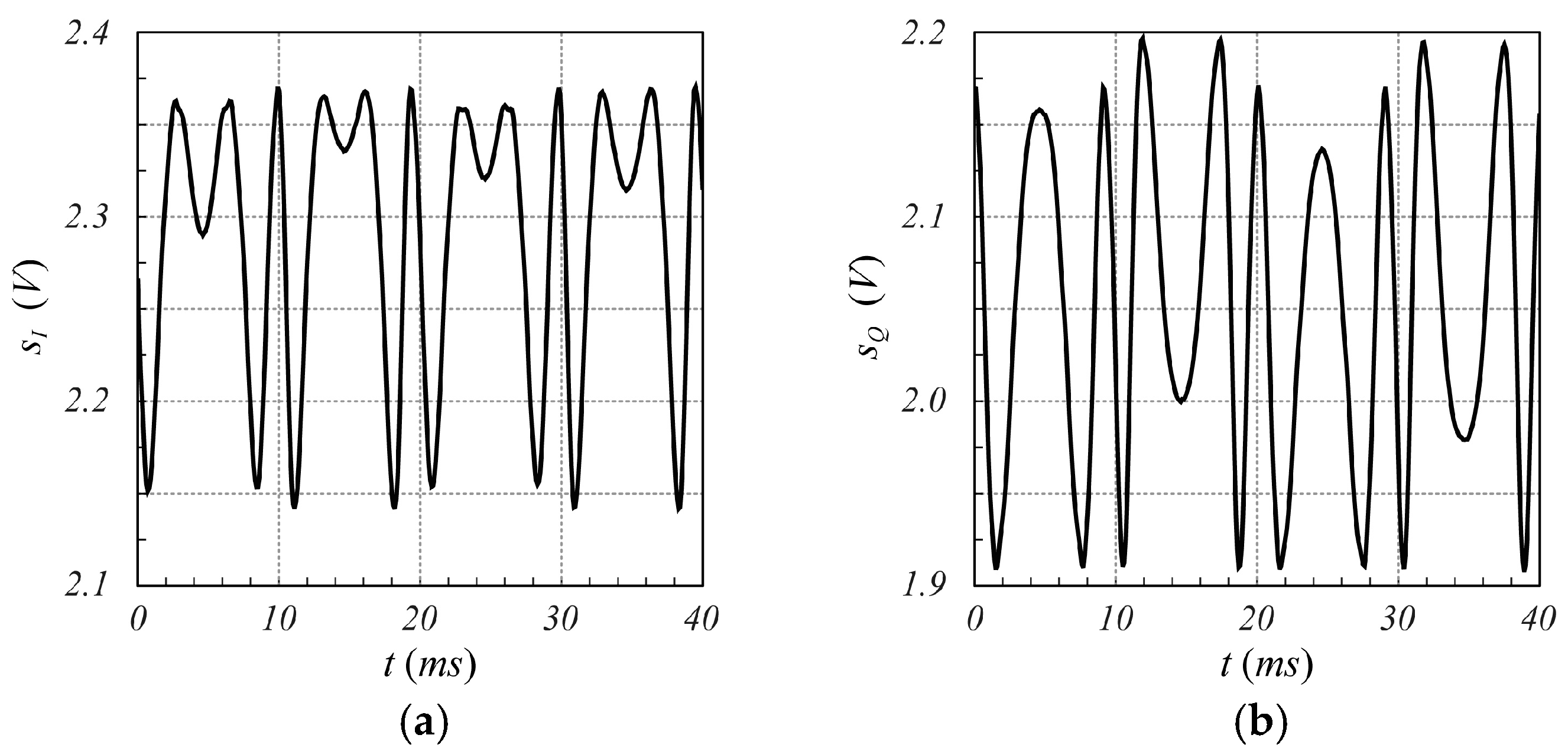
3.1.1. Effect of Mutual Coupling Interference and Synchronization
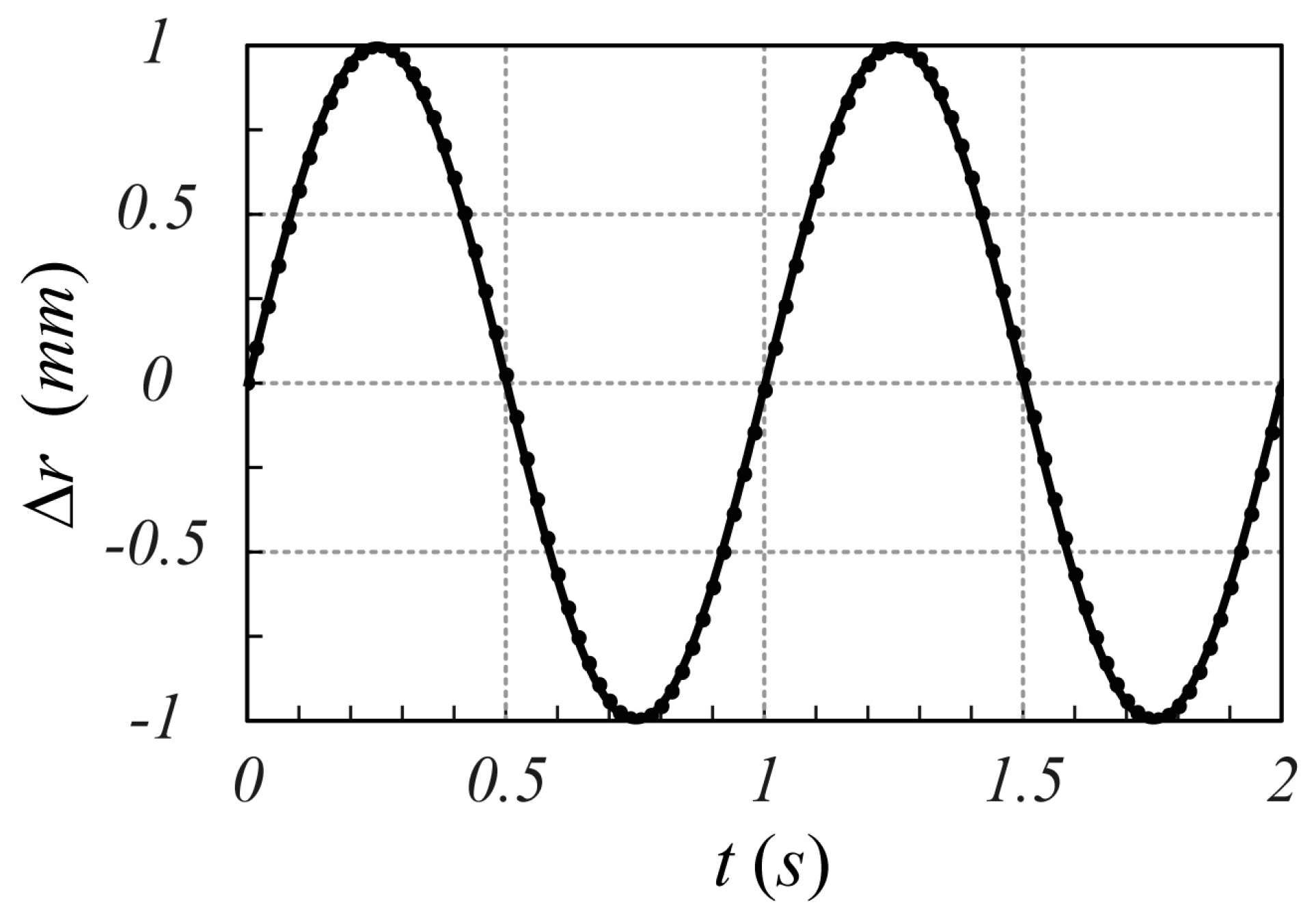
3.1.2. Motion Detection
3.2. Experimental Results
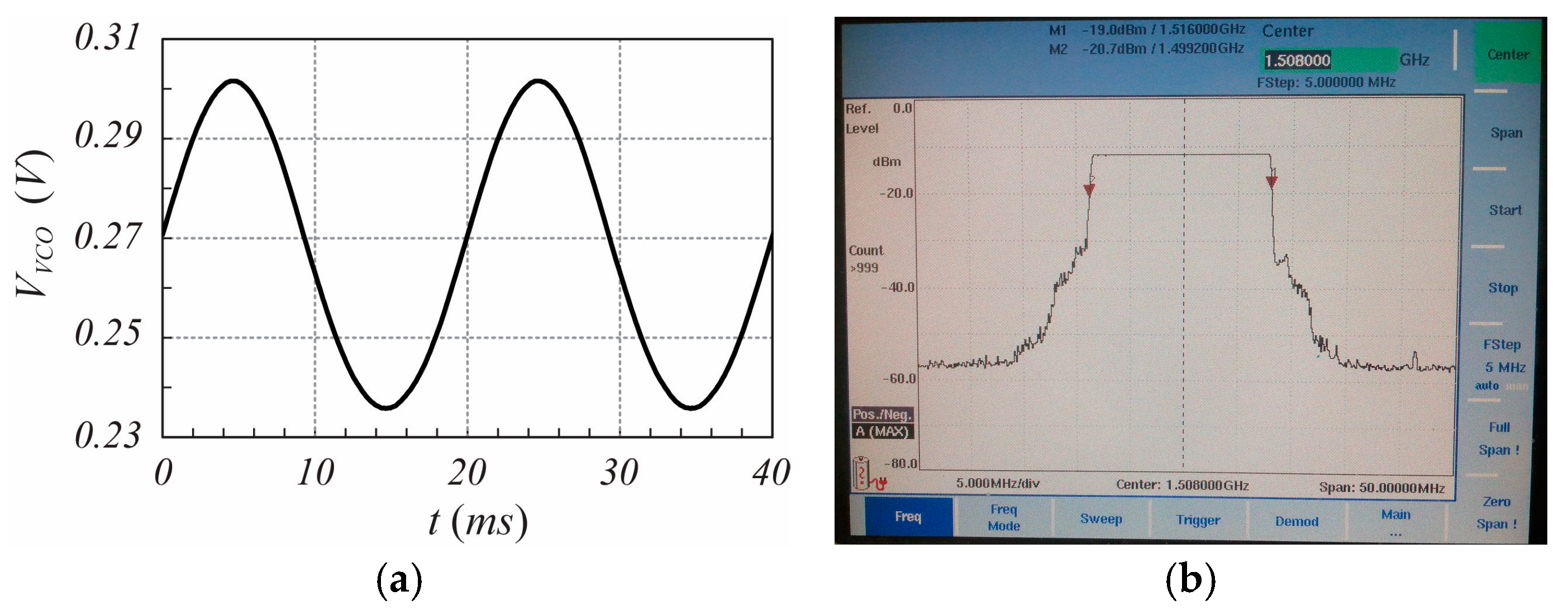
3.2.1. Mutual Coupling Interference
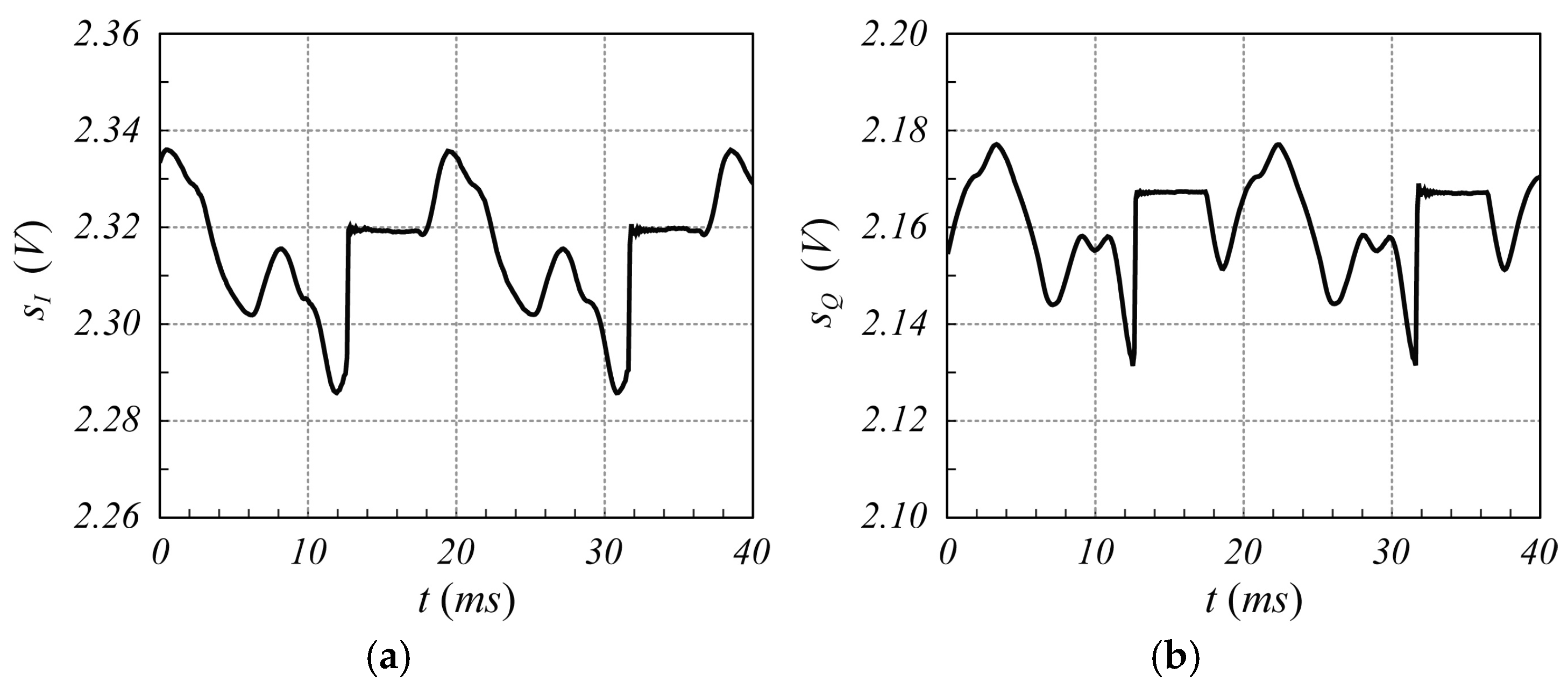
3.2.2. Motion Detection
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADC | Analog-to-digital converter |
| CW | Continuous wave |
| DAQ | Data acquisition |
| EM | Electromagnetic |
| FM | Frequency modulation |
| FMCW | Frequency-modulated continuous wave |
| IF | Intermediate frequency |
| LF | Low frequency |
| MIMO | Multiple-input multiple-output |
| MMIC | Monolithic microwave integrated circuit |
| VCO | Voltage-controlled oscillator |
| PLL | Phase-locked loop |
| RF | Radio frequency |
| SFMCW | Sinusoidal frequency-modulated continuous wave |
References
- Gu, C. Short-Range Noncontact Sensors for Healthcare and Other Emerging Applications: A Review. Sensors 2016, 16, 1169. [Google Scholar] [CrossRef] [PubMed]
- Pisa, S.; Pittella, E.; Piuzzi, E. A survey of radar systems for medical applications. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 64–81. [Google Scholar] [CrossRef]
- Charvat, G.L. Small and Short-Range Radar Systems; CRC Press Taylor & Francis Group: Boca Raton, FL, USA, 2014. [Google Scholar]
- Kebe, M.; Gadhafi, R.; Mohammad, B.; Sanduleanu, M.; Saleh, H.; Al-Qutayri, M. Human Vital Signs Detection Methods and Potential Using Radars: A Review. Sensors 2020, 20, 1454. [Google Scholar] [CrossRef]
- Turppa, E.; Kortelainen, J.M.; Antropov, O.; Kiuru, T. Vital Sign Monitoring Using FMCW Radar in Various Sleeping Scenarios. Sensors 2020, 20, 6505. [Google Scholar] [CrossRef]
- Singh, A.; Rehman, S.U.; Yongchareon, S.; Chong, P.H.J. Multi-Resident Non-Contact Vital Sign Monitoring Using Radar: A Review. IEEE Sens. J. 2021, 21, 4061–4084. [Google Scholar] [CrossRef]
- Lv, W.; He, W.; Lin, X.; Miao, J. Non-Contact Monitoring of Human Vital Signs Using FMCW Millimeter Wave Radar in the 120 GHz Band. Sensors 2021, 21, 2732. [Google Scholar] [CrossRef]
- Xiang, M.; Ren, W.; Li, W.; Xue, Z.; Jiang, X. High-Precision Vital Signs Monitoring Method Using a FMCW Millimeter-Wave Sensor. Sensors 2022, 22, 7543. [Google Scholar] [CrossRef]
- Pramudita, A.A.; Lin, D.-B.; Hsieh, S.-N.; Ali, E.; Ryanu, H.H.; Adiprabowo, T.; Purnomo, A.T. Radar System for Detecting Respiration Vital Sign of Live Victim Behind the Wall. IEEE Sens. J. 2022, 15, 14670–14685. [Google Scholar] [CrossRef]
- Mostafanezhad, I.; Boric-Lubecke, O. Benefits of Coherent Low-IF for Vital Signs Monitoring Using Doppler Radar. IEEE Trans. Microw. Theory Tech. 2014, 10, 2481–2487. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, Y.; Li, Z.; Li, G.; Li, K.; Zhang, H.; Li, F. A Novel Demodulation Algorithm for Micro-Displacement Measurement Based on FMCW Sinusoidal Modulation. Photonics 2023, 10, 1196. [Google Scholar] [CrossRef]
- Rodriguez, D.; Vallejo-Montoya, N.; Li, C. SMCW Radar for Low IF Sensing Applications. In Proceedings of the 2022 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNeT), Las Vegas, NV, USA, 16–19 January 2022; pp. 22–25. [Google Scholar]
- Sacco, G.; Piuzzi, E.; Pittella, E.; Pisa, S. An FMCW Radar for localization and vital signs measurement for different chest orientations. Sensors 2020, 20, 3489. [Google Scholar] [CrossRef] [PubMed]
- Gouveia, C.; Albuquerque, D.; Pinho, P.; Vieira, J. Evaluation of Heartbeat Signal Extraction Methods Using a 5.8 GHz Doppler Radar System in a Real Application Scenario. IEEE Sens. J. 2022, 8, 7979–7989. [Google Scholar] [CrossRef]
- Peng, Z.; Muñoz-Ferreras, J.M.; Tang, Y.; Liu, C.; Gómez-García, R.; Ran, L.; Li, C. A portable FMCW interferometry radar with programmable low-IF architecture for localization, ISAR imaging, and vital sign tracking. IEEE Trans. Microw. Theory Tech. 2017, 65, 1334–1344. [Google Scholar] [CrossRef]
- Infineon. BGT24MTR11 Data Sheet. Available online: https://www.infineon.com/cms/en/product/sensor/radar-sensors/radar-sensors-for-iot/24ghz-radar/bgt24mtr11/ (accessed on 8 November 2024).
- Infineon. BGT24MTR12 Data Sheet. Available online: https://www.infineon.com/cms/en/product/sensor/radar-sensors/radar-sensors-for-iot/24ghz-radar/bgt24mtr12/ (accessed on 8 November 2024).
- Infineon. BGT24MLTR22 Data Sheet. Available online: https://www.infineon.com/dgdl/Infineon-BGT24LTR22-DataSheet-v01_00-EN.pdf?fileId=5546d462700c0ae60170532090534d21 (accessed on 8 November 2024).
- Analog-Devices: EV-RADAR-MMIC2 Data Sheet. Available online: https://www.analog.com/en/resources/evaluation-hardware-and-software/evaluation-boards-kits/eval-radar-mmic.html (accessed on 8 November 2024).
- Analog-Devices: TINYRAD Data Sheet. Available online: https://www.analog.com/en/resources/evaluation-hardware-and-software/evaluation-boards-kits/eval-tinyrad.html#eb-overview (accessed on 8 November 2024).
- Sacco, G.; Pittella, E.; Piuzzi, E.; Pisa, S. A Radar System for Indoor Human Localization and Breath Monitoring. In Proceedings of the 2018 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Rome, Italy, 11–13 June 2018; pp. 1–6. [Google Scholar]
- Will, C.; Vaishnav, P.; Chakraborty, A.; Santra, A. Human Target Detection, Tracking, and Classification Using 24-GHz FMCW Radar. IEEE Sens. J. 2019, 17, 7283–7299. [Google Scholar] [CrossRef]
- Cardillo, E.; Li, C.; Caddemi, A. Vital Sign Detection and Radar Self-Motion Cancellation Through Clutter Identification. IEEE Trans. Microw. Theory Tech. 2021, 69, 1932–1942. [Google Scholar] [CrossRef]
- King, T.H.; He, J.; Yao, C.-K.; Prabhakara, A.; Alipour, M.; Kumar, S.; Rowe, A.; Soltanaghai, E. Platypus: Sub-mm Micro-Displacement Sensing with Passive Millimeter-wave Tags As Phase Carriers. In Proceedings of the 22nd International Conference on Information Processing in Sensor Networks, New York, NY, USA, 9–12 May 2023; pp. 136–148. [Google Scholar]
- Xie, Z.; Hua, Y.; Ye, F. A Measurement Study of FMCW Radar Configurations for Non-contact Vital Signs Monitoring. In Proceedings of the 2022 IEEE Radar Conference (RadarConf22), New York, NY, USA, 21–25 March 2022; pp. 1–6. [Google Scholar]
- Etinger, A.; Balal, N.; Litvak, B.; Einat, M.; Kapilevich, B.; Pinhasi, Y. Non-Imaging MM-Wave FMCW Sensor for Pedestrian Detection. IEEE Sens. J. 2014, 4, 1232–1237. [Google Scholar] [CrossRef]
- Caratelli, D.; Cicchetti, R.; Cicchetti, V.; Testa, O. A wideband high-gain circularly-polarized dielectric horn antenna equipped with Lamé-axicon stacked-disk lens for remote sensing, air traffic control and satellite communications. IEEE Access 2023, 11, 20912–20922. [Google Scholar] [CrossRef]
- Pisa, S.; Mihu, G.A.; Piuzzi, E. Modeling and Realization of a 24-GHz FMCW Radar for Accurate Target Distance Identification. In Proceedings of the 2021 XXXIVth General Assembly and Scientific Symposium of the International Union of Radio Science (URSI GASS), Rome, Italy, 28 August–4 September 2021; pp. 1–4. [Google Scholar]
- Neemat, S.; Uysal, F.; Krasnov, O.; Yarovoy, A. Reconfigurable Range-Doppler Processing and Range Resolution Improvement for FMCW Radar. IEEE Sens. J. 2019, 20, 9294–9303. [Google Scholar] [CrossRef]
- InnoSent Application Note II. Detection and Ranging of Moving and Stationary Objects by Using the FMCW Radar Principle. Available online: https://www.innosent.de/fileadmin/media/dokumente/Downloads/Application_Note_II_-_web.pdf (accessed on 21 March 2025).
- Carson, J.R. Notes on the theory of modulation. Proc. IRE 1922, 10, 57–64. [Google Scholar] [CrossRef]
- Abramowitz, M.; Stegun, I. Handbook of Mathematical Functions; Dover: New York, NY, USA, 1965. [Google Scholar]
- Analog-Devices: HMC6475LC4B Data Sheet. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/HMC6475.pdf (accessed on 21 March 2025).
- Mini Circuit: ZX95-6740C+. Data Sheet. Available online: https://www.minicircuits.com/pdfs/ZX95-6740C+.pdf?srsltid=AfmBOoqIcFKp5jN9iJjS4HeHfueL5Watahm1zgSw7wcXEWmS5LChdmM4 (accessed on 21 March 2025).
- Analog-Devices: ADF4159 Data Sheet. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/adf4159.pdf (accessed on 21 March 2025).
- Krauss, H.L. Solid State Radio Engineering; John Wiley & Sons: New York, NY, USA, 1980. [Google Scholar]
- Analog-Devices: HMC8192-Die 20 GHz to 42 GHz, Wideband I/Q Mixer Data Sheet. Available online: https://www.analog.com/hmc8192?doc=hmc8192-die.pdf (accessed on 28 March 2025).
- Beltrão, G.; Martins, W.A.; Shankar, M.R.B.; Alaee-Kerahroodi, M.; Schroeder, U.; Tatarinov, D. Adaptive Nonlinear Least Squares Framework for Contactless Vital Sign Monitoring. IEEE Trans. Microw. Theory Tech. 2023, 71, 1696–1710. [Google Scholar] [CrossRef]
- ICNIRP. Guidelines for limiting exposure to electromagnetic fields (100 kHz to 300 GHz). Health Phys. 2020, 118, 483–524. [Google Scholar] [CrossRef] [PubMed]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Testa, O.; Cicchetti, R.; Pisa, S.; Pittella, E.; Piuzzi, E. A Novel FMCW Radar Scheme with Millimeter Motion Detection Capabilities Suitable for Cardio-Respiratory Monitoring. Sensors 2025, 25, 2765. https://doi.org/10.3390/s25092765
Testa O, Cicchetti R, Pisa S, Pittella E, Piuzzi E. A Novel FMCW Radar Scheme with Millimeter Motion Detection Capabilities Suitable for Cardio-Respiratory Monitoring. Sensors. 2025; 25(9):2765. https://doi.org/10.3390/s25092765
Chicago/Turabian StyleTesta, Orlandino, Renato Cicchetti, Stefano Pisa, Erika Pittella, and Emanuele Piuzzi. 2025. "A Novel FMCW Radar Scheme with Millimeter Motion Detection Capabilities Suitable for Cardio-Respiratory Monitoring" Sensors 25, no. 9: 2765. https://doi.org/10.3390/s25092765
APA StyleTesta, O., Cicchetti, R., Pisa, S., Pittella, E., & Piuzzi, E. (2025). A Novel FMCW Radar Scheme with Millimeter Motion Detection Capabilities Suitable for Cardio-Respiratory Monitoring. Sensors, 25(9), 2765. https://doi.org/10.3390/s25092765