3.1. Case Description and Modeling
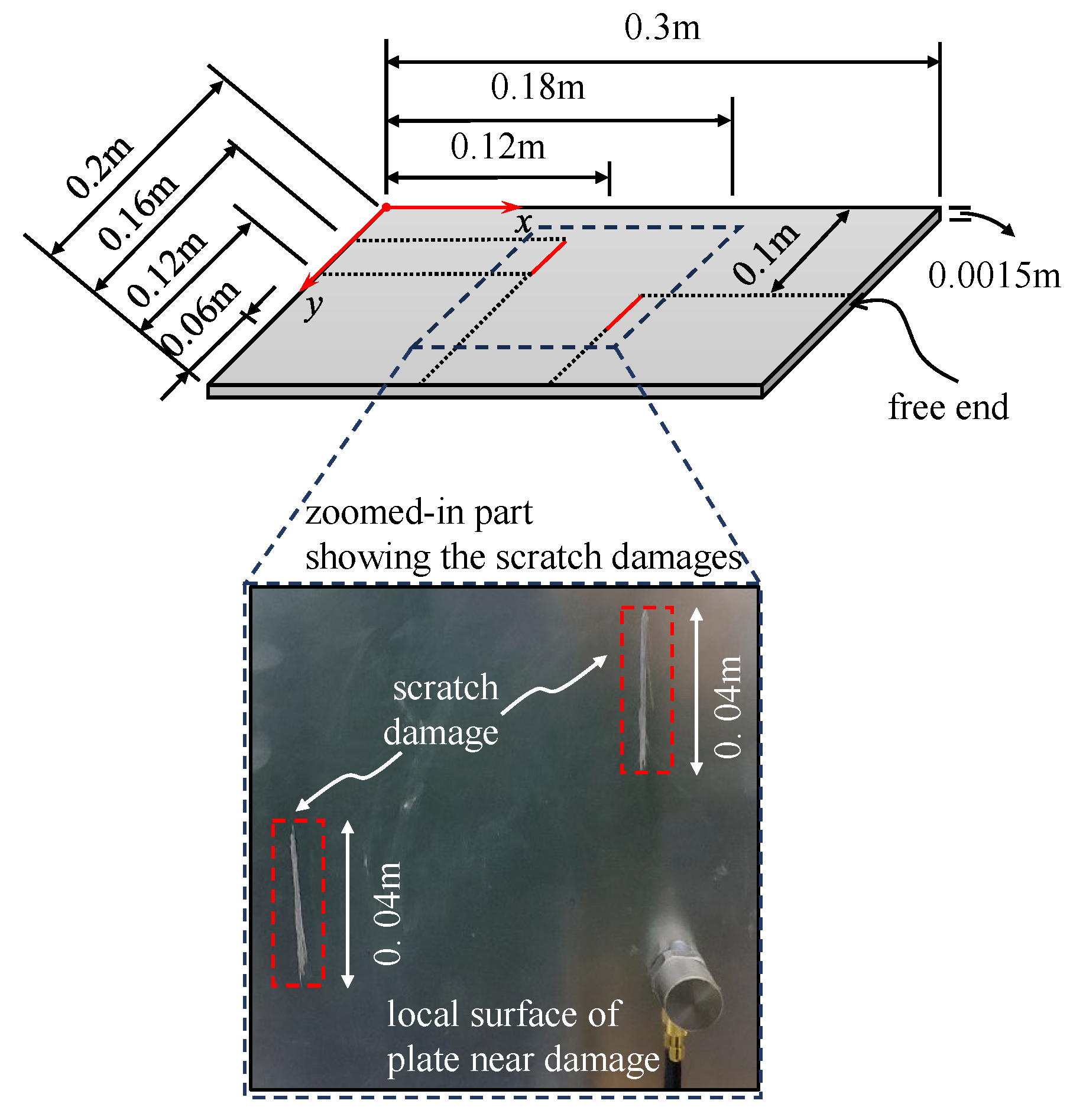
In order to verify the feasibility and effectiveness of the proposed method, finite element models of plates with two common types of damage—breathing cracks and regional notch damage—were established using ANSYS 2020R2 for numerical simulation. The geometric parameters of the damaged plates, including the length (
), width (
), and thickness (
), and the material parameters, including elastic modulus (
), Poisson’s ratio (
), and density (
), are given in
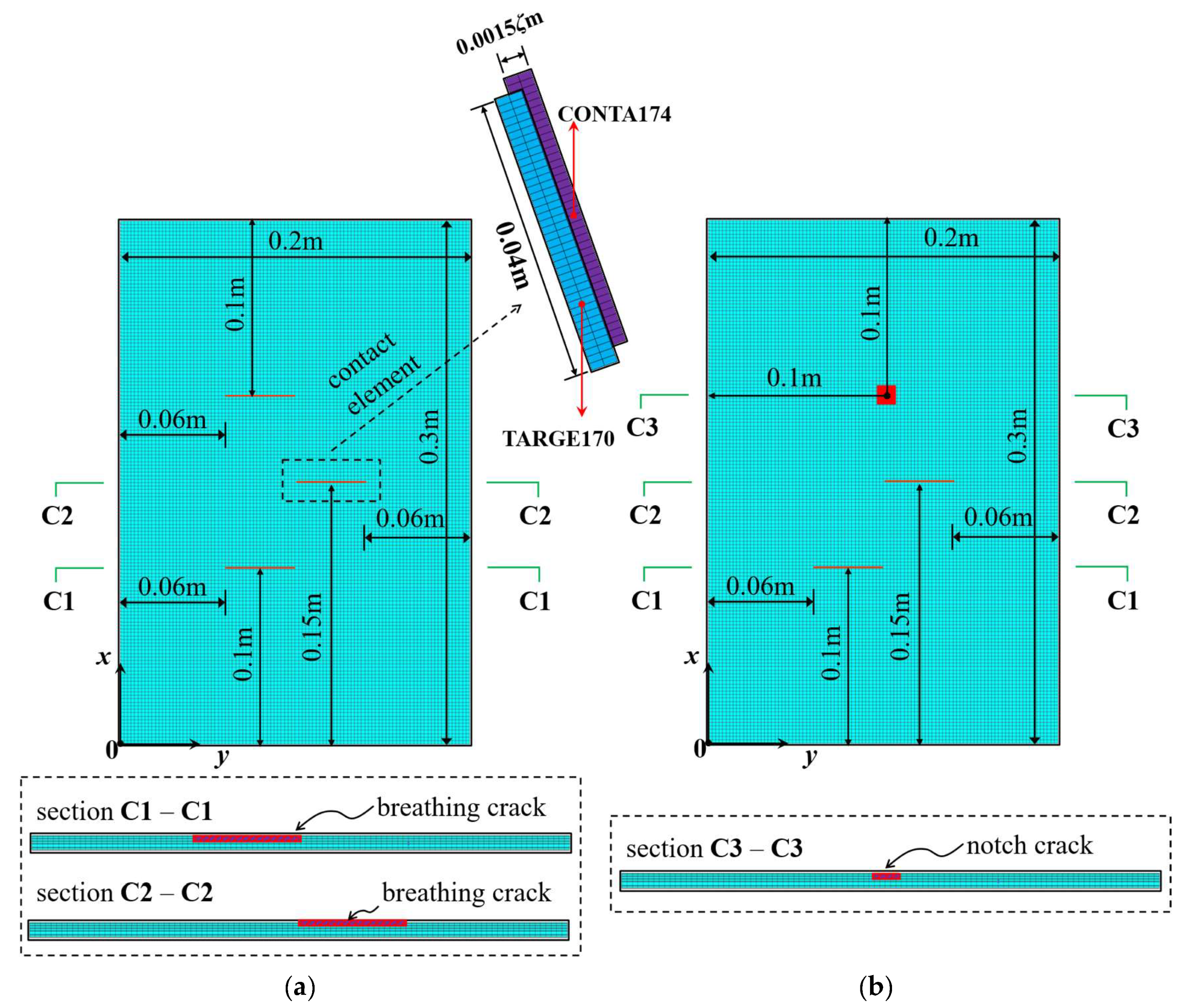
Table 1. The breathing crack was specified by the relative crack depth
(ratio of crack depth to plate thickness) and its length was 0.04 m. The regional notch damage was specified by the relative damage length of area
(ratio of damage length to plate length) and the depth was 0.00015 m.
Two multiple-damage cases were set: one was a multi-crack damage case, M1, and the other was a crack and notch damage mixed-damage case, M2. The cantilever plate was established and discretized with eight-node solid elements, as shown in
Figure 10. The element size was 0.002 m along the plate length and width direction, and the element size in the plate thickness direction was set according to the damage depth. In this work, the elements TARGE170 and CONTA174 were used to set frictionless standard contact pairs on two opposite crack surfaces. In order to prevent the crack surfaces from penetrating each other, contact stiffness was set on the contact pairs according to the method in references [
39,
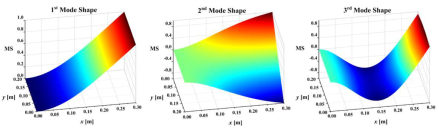
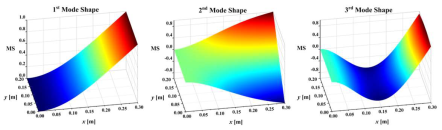
40]. An impact load of 500 N was applied to the plate surface nodes along the plate thickness direction. The displacement responses of the all nodes along the thickness direction of the plate were calculated by ANSYS 2020R2 transient dynamic analysis, and the Rayleigh damping assumption was adopted in the calculation and analysis. The sampling frequency was set to 500 Hz and the sampling time was 3 s. The first-three-order mode shapes of the damaged plates are shown in
Table 2. They were obtained by simulating the OMA approach adopted in this work in order to make the simulation more realistic.
Measured dynamic responses inevitably contain noise due to environmental temperature, humidity changes, and equipment limitations. To simulate realistic conditions, Gaussian white noise was added to the extracted mode shapes. Damage detection was then performed using these noise-contaminated mode shapes. The noise-added mode shapes can be expressed as follows [
34]:
where
is the noise-added mode shape,
is the mode shape without noise,
is the white noise intensity,
is a set of random numbers satisfying a normal distribution with a mean of 0 and a variance of 1, and
is the root mean square of the mode shape.
3.2. Results of Damage Identification
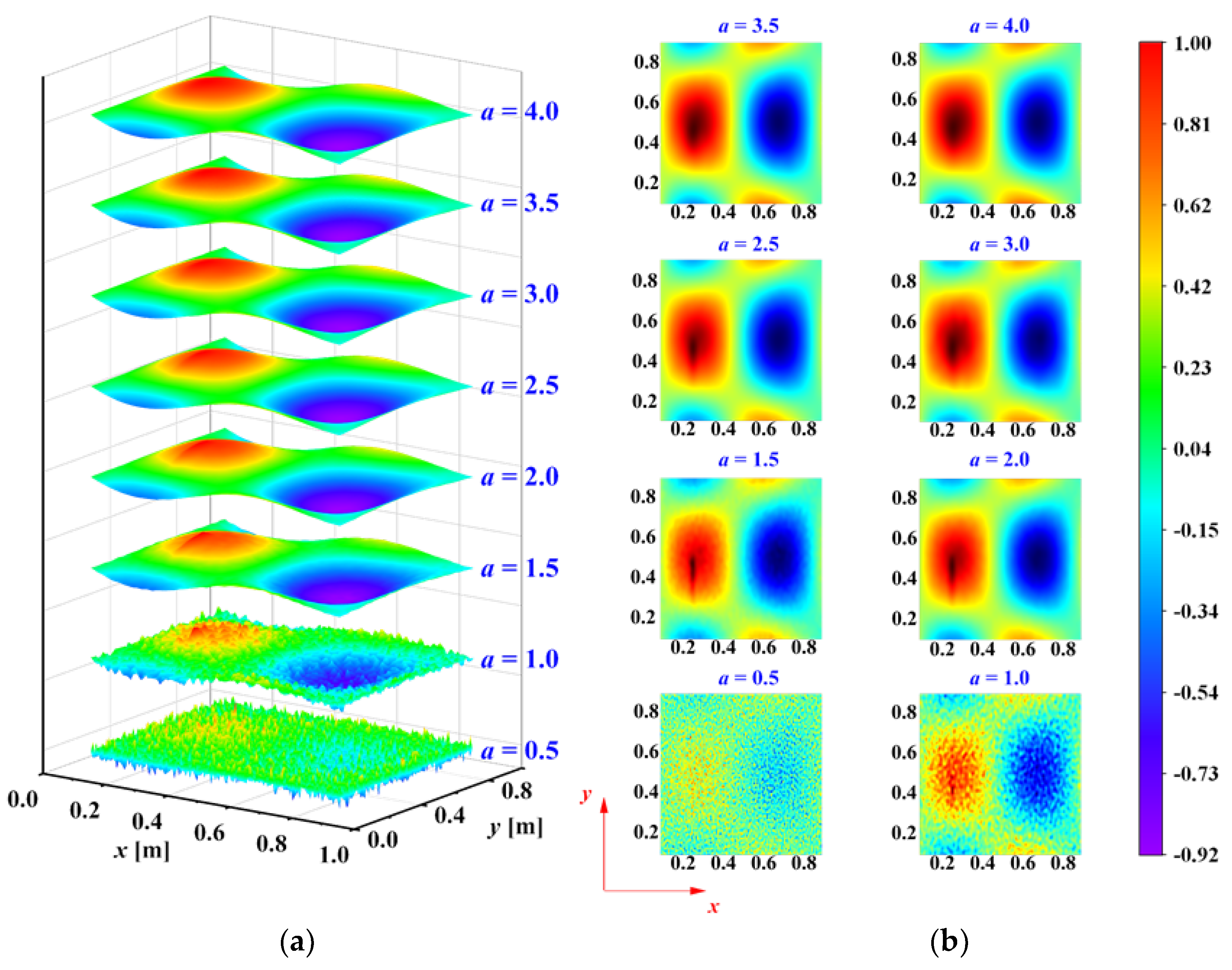
Considering the multi-crack damage case M1, its third mode shape under a noise intensity of
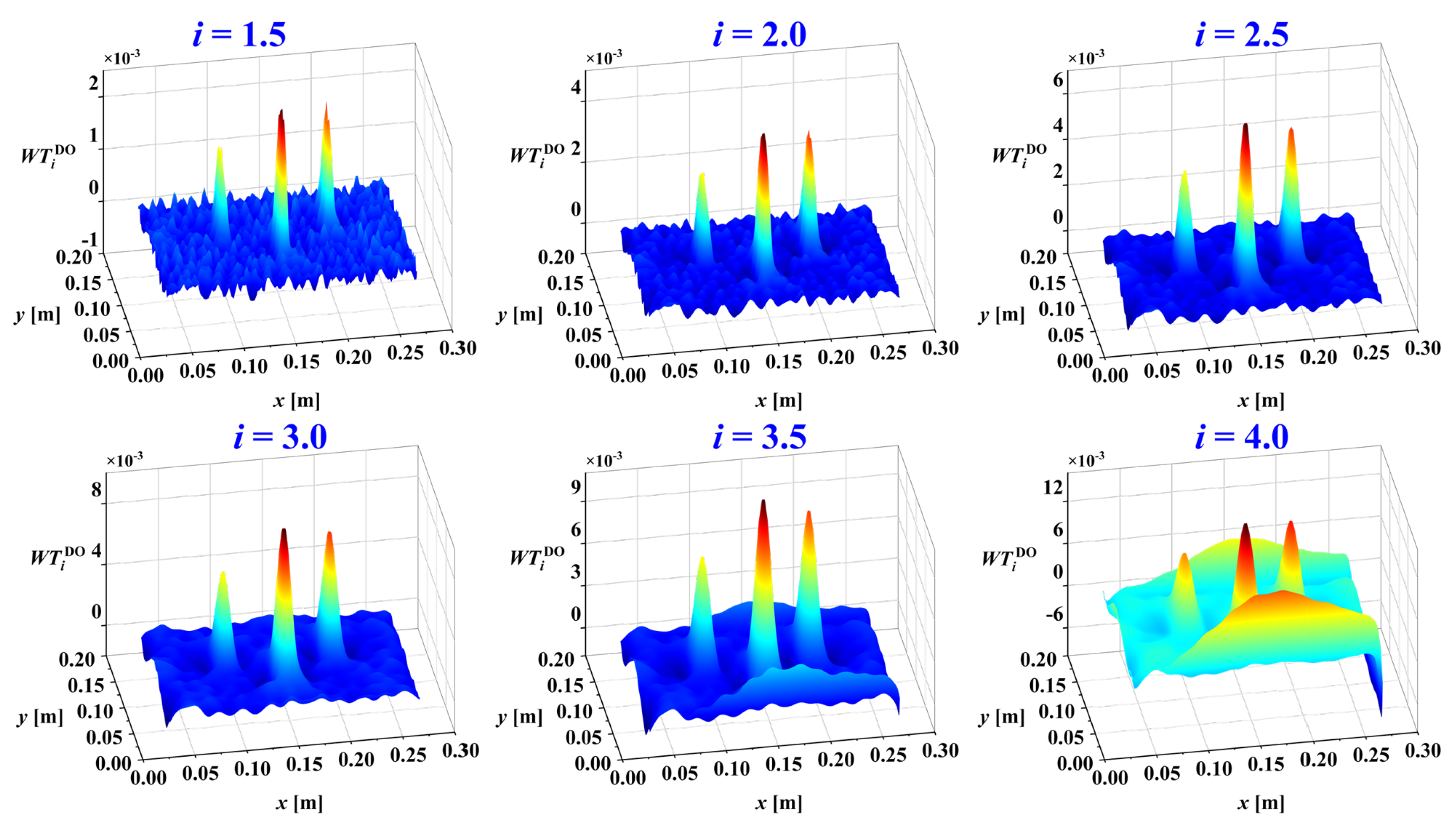
was used to identify the damage. It was decomposed using 2D-CWT (Mexican-hat wavelet) with scales ranging from
a = 0.5 to 4.0 in increments of 0.5. The resulting wavelet coefficients, excluding distorted boundary coefficients, are presented in
Figure 11. The damage information is obscured by noise at small scales, while the dominant waveform trend at large scales mask its presence, as demonstrated in
Figure 11. Furthermore, the damage features are not readily apparent at intermediate scales.
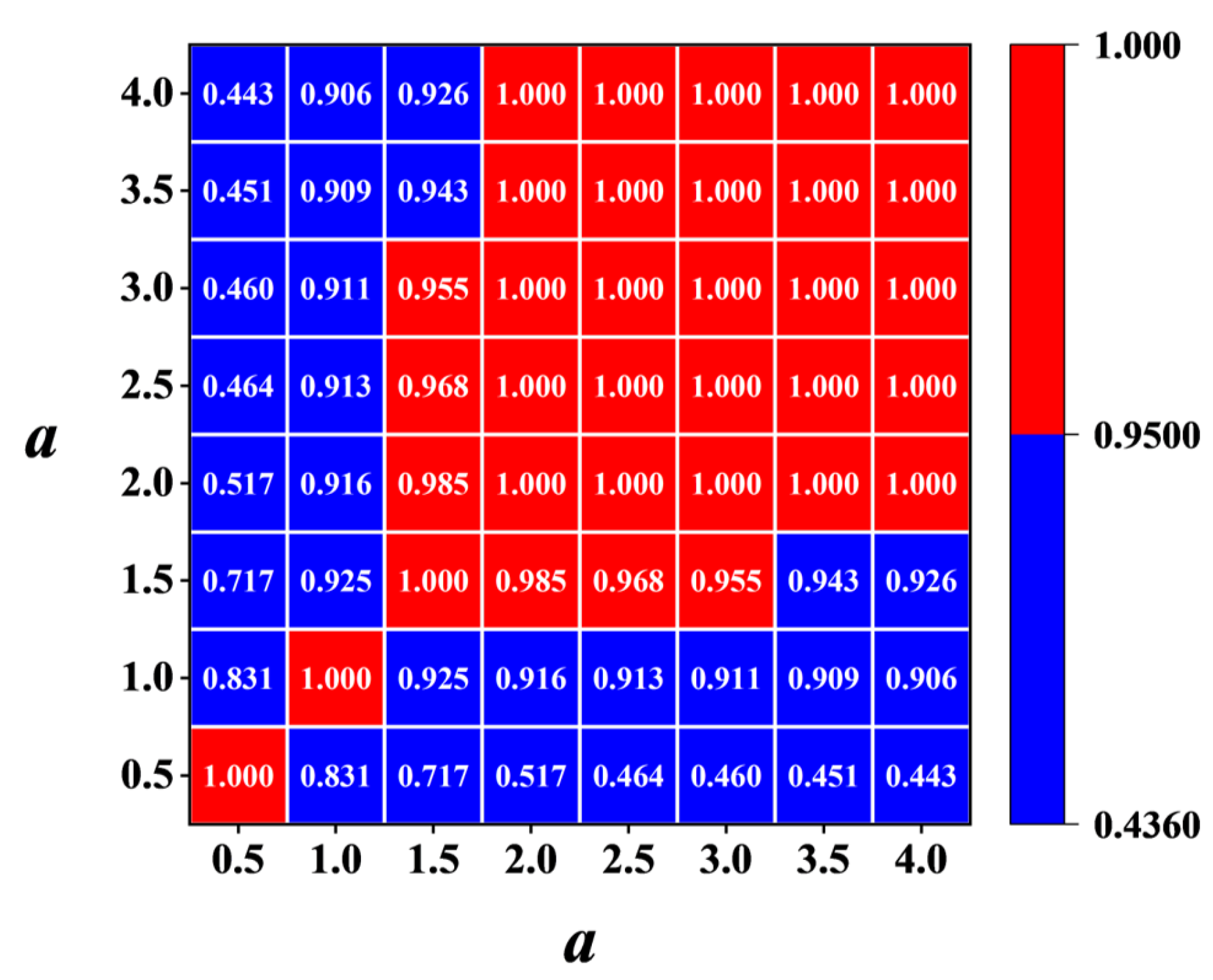
Figure 12 illustrates the correlation coefficients, R, between these scales, calculated using Equation (11). Lower correlation coefficients indicate that these scales may contain less-reliable damage information due to the influence of noise. Scale information with a correlation coefficient below the threshold
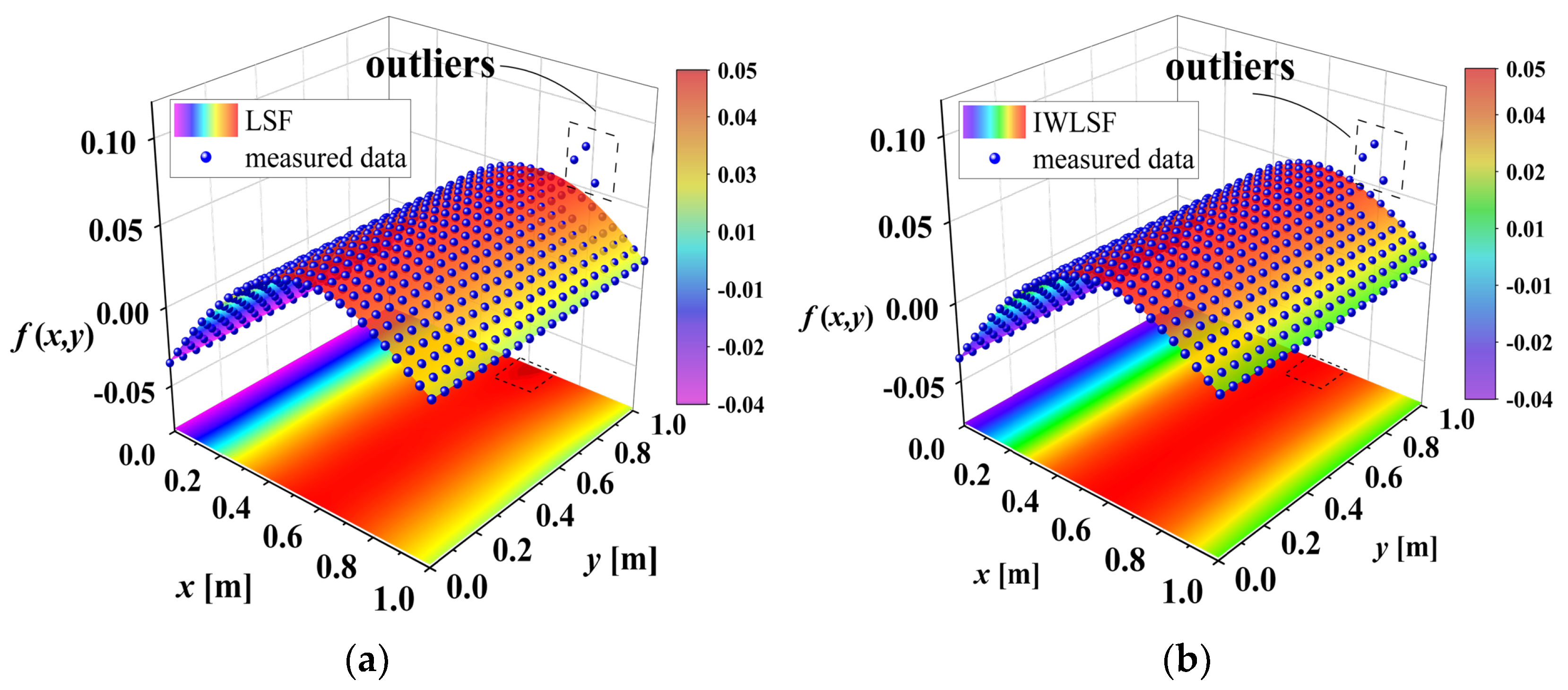
should be eliminated. Here, the scales 0.5 and 1 are eliminated. After that, IWLSF was performed on the remaining scales,
was calculated by subtraction, and the results are shown in
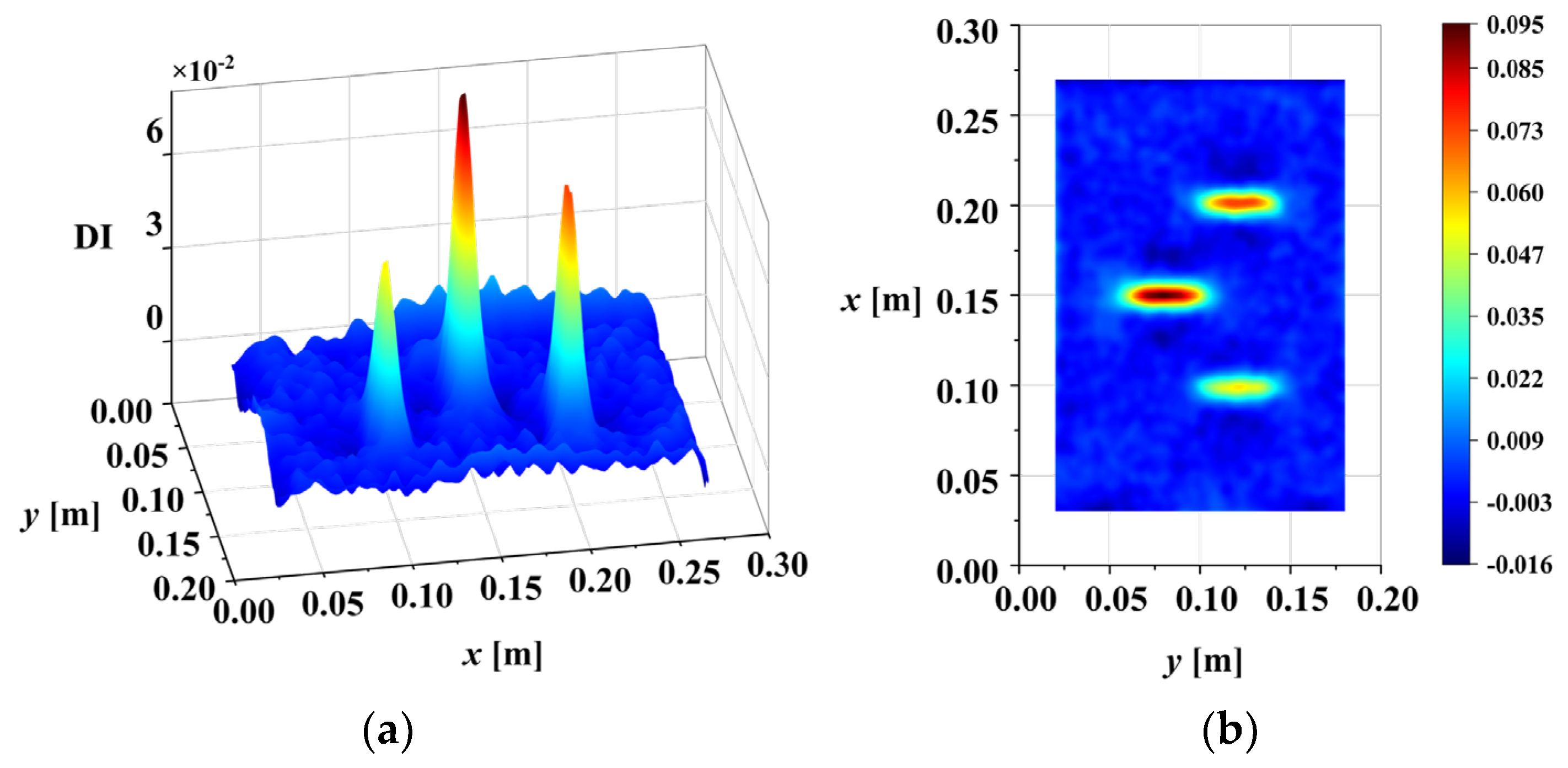
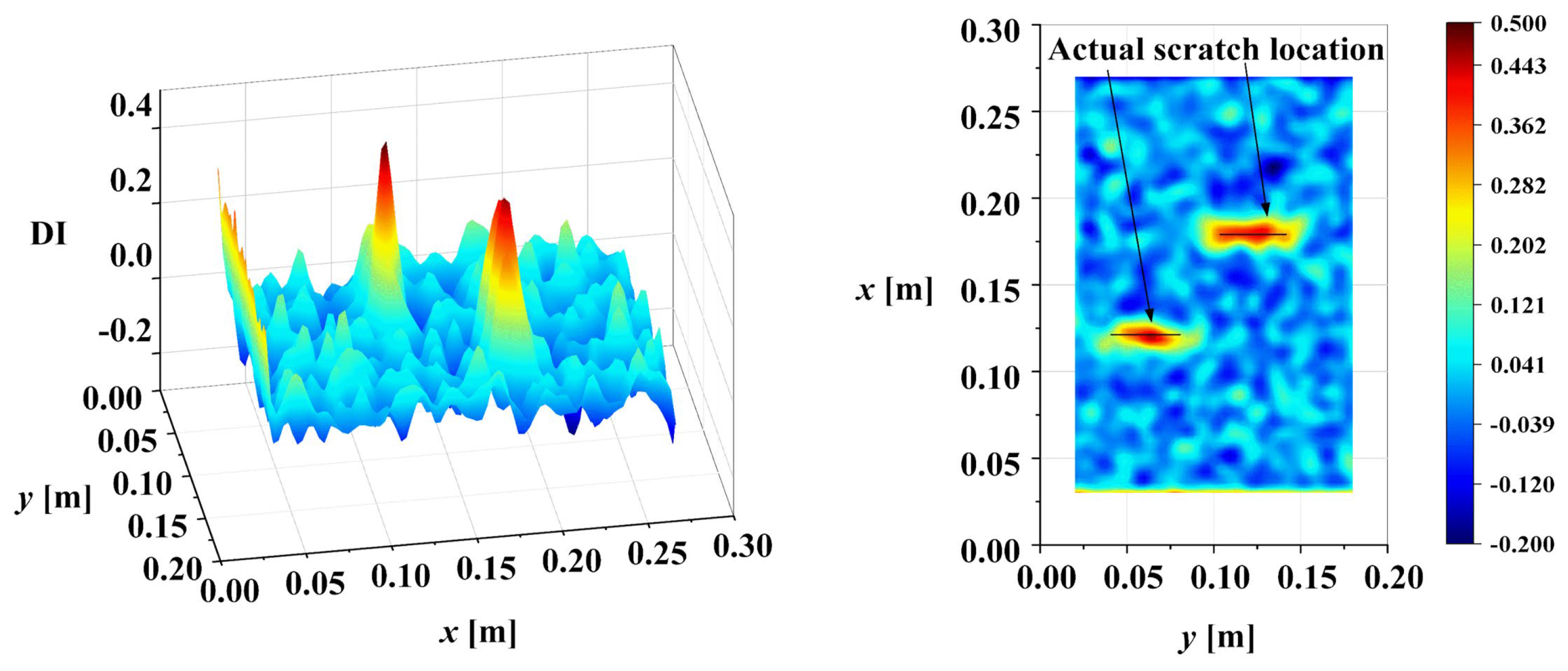
Figure 13. After removing noise scales and eliminating waveform trends, the abrupt peaks caused by damage are highlighted. Finally, the DI was calculated using Equation (19). The three-dimensional surface plot and X-Y view of the DI map are illustrated in
Figure 14.
In conclusion, based on the third-order mode shape of M1, the multi-crack damage can be accurately located in the noisy environment (
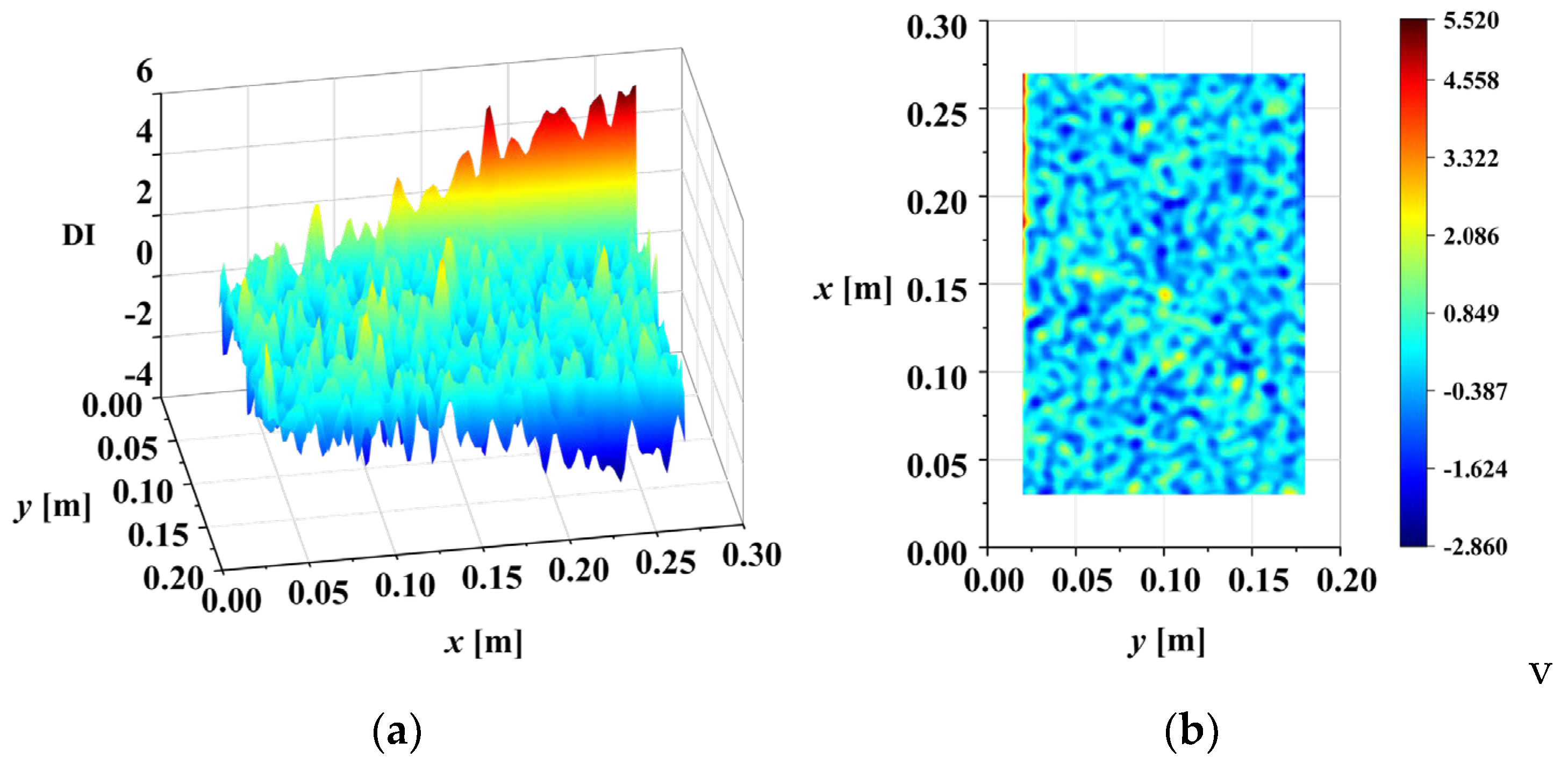
) using the DI. The first- and second-order mode shapes of M1 in the noise environment (
) were processed according to the above flow, and the DI maps are shown in
Figure 15 and
Figure 16, respectively. It can be seen from the figure that the damage localization results based on the first bending mode and the second torsional mode are not ideal, especially for the second mode, where there is no damage abrupt peak at all. The reason for this may be that bending mode is more sensitive to crack damage than the torsion mode, and the higher-order mode contains more singular information to reveal damage. Based on the above analysis, the third-order bending mode shape is adopted to identify damage below. Although higher-order mode shapes have potential advantages for damage identification, they are not adopted in this work because they are highly susceptible to noise interference and difficult to measure accurately in real-world conditions.
The above results were obtained under a noise intensity of
. The identification results for M1 under different noise intensities are shown in
Figure 17. In order to quantify the noise robustness of the proposed DI, a noise sensitivity analysis of the DI was conducted. A normalized reference damage index function
was constructed, with value 1 in a damaged area and value 0 in an intact area, and its expression is as follows:
A correlation analysis between the
and the DI at various noise intensities was conducted using Equation (11). In this analysis, all of the DIs were normalized. A higher correlation coefficient indicates being less sensitive to noise and more robust. The correlation coefficients of damage case M1 under different noise intensities are shown in
Table 3. In addition, the CMS2D method was evaluated for comparison. Ideally, the DI should be 1 only at the location of the damage. However, due to the amplification effects of damage identification methods in surrounding areas, this ideal is difficult to achieve, leading to a relatively low correlation. To evaluate the effectiveness of the damage indices under different noise intensities, the effectiveness of the noise-free DI was set to 1. The correlation coefficients of the DIs under noisy conditions were normalized by the noise-free correlation coefficient
, and normalization is expressed as follows:
where
represents the normalized effectiveness,
represents the correlation coefficient under noise-free conditions, and
is the correlation coefficient under a specific noise intensity
.
Table 3 demonstrates that the effectiveness of the proposed method can exceed 95% at a noise intensity of
. Therefore, without any additional noise-reduction algorithms, the proposed DI can accurately detect crack locations with a noise intensity of
.
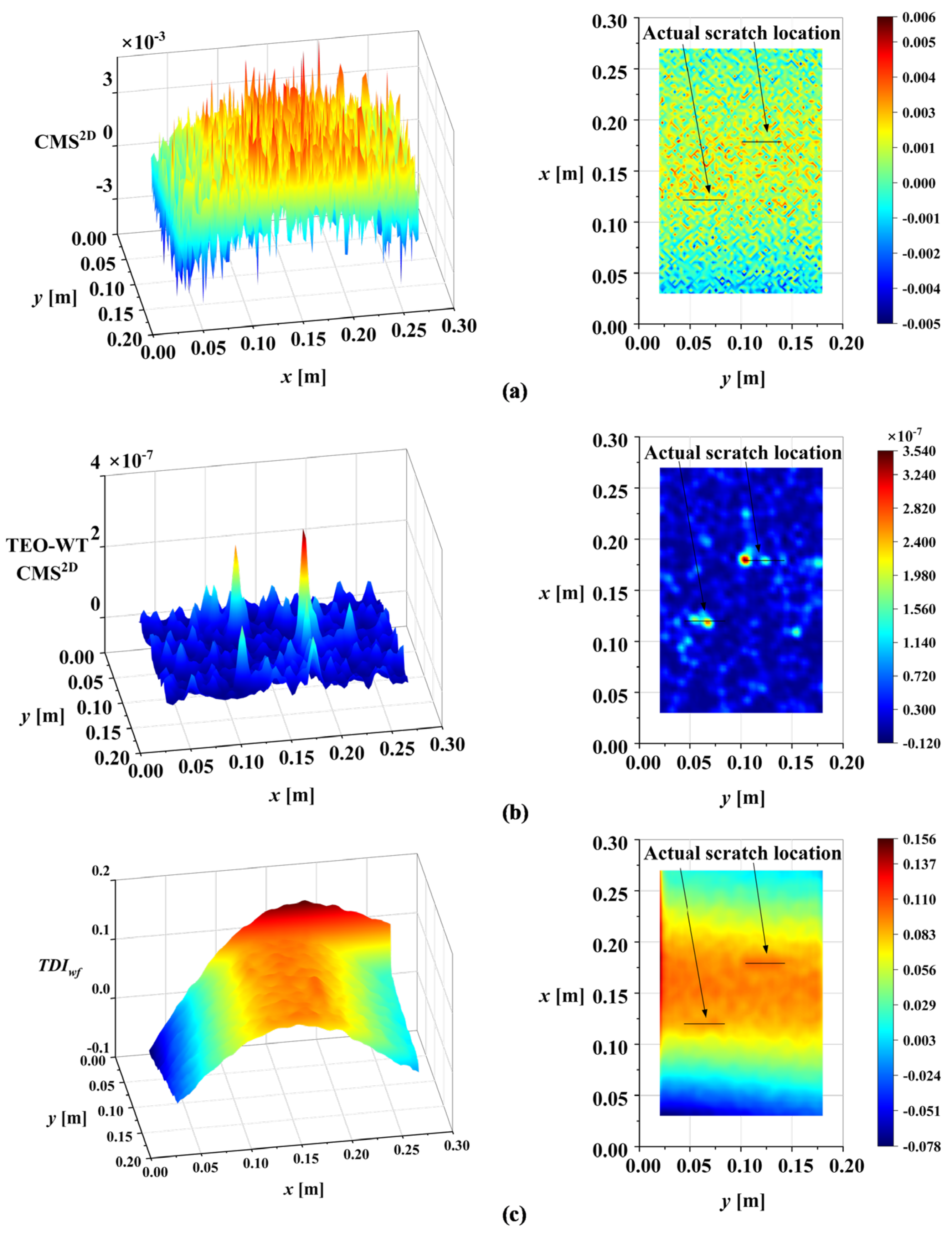
To show the improvement of the proposed DI in this work, the DI was compared with CMS
2D, TEO-WT CMS
2D, and
TDIwf. The DI maps of the four methods are presented in
Figure 18. Further, to quantify the performance of our method, a generic sensitivity analysis of the DIs to damage was carried out. The sensitivity of the different DIs to damage was discussed by analyzing the correlation between
and the DIs established by the different methods. A higher correlation indicated a greater sensitivity to damage, suggesting higher effectiveness in damage identification. For a unified assessment of the four methods, 100 damage detection trials were conducted for each method under random noise of intensity
. The results were then averaged and normalized for sensitivity analysis.
Table 4 presents the correlation analysis results between the normalized statistical mean of each method’s DI and the normalized reference index
.
The proposed DI offers significant improvements over existing wavelet-based methods, as illustrated in
Table 4. Specifically, existing methods suffer from several limitations. Although the TEO-WT CMS
2D method can identify damage under certain conditions, its reliance on manual wavelet scale selection introduces subjectivity and potential for error. If the wavelet scale adopted is not appropriate, the TEO-WT CMS
2D method will fail to detect damage. The
TDIwf method, while incorporating multiple scales, suffers from low noise robustness, requiring additional noise-reduction algorithms. Furthermore, the waveform trend significantly affects its performance, potentially masking damage features. In contrast, the proposed DI demonstrates distinctive features that effectively characterize the presence of damage. By using correlation analysis to determine the wavelet scale, subjectivity is avoided. Based on MIS, the proposed DI separates noise and waveform trends, highlighting damage information and resulting in effective damage identification.
To verify the universality of the proposed DI for different damage types, based on the analysis above, the third-order mode shape of damage case M2 was tested directly under a noise intensity of
.
Figure 19a illustrates the DI maps for damage case M2. The results confirm the applicability of the proposed DI to both linear damage (cracks) and regional damage. A comparison with existing methods for damage case M2 is shown in
Figure 19.
Table 5 presents the sensitivity to mixed damage (damage case M2) of each method, found by correlation analysis.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}