
On the Feasibility of Adapting the LiVec Tactile Sensing Principle to Non-Planar Surfaces: A Thin, Flexible Tactile Sensor

Abstract
1. Introduction
2. Materials and Methods
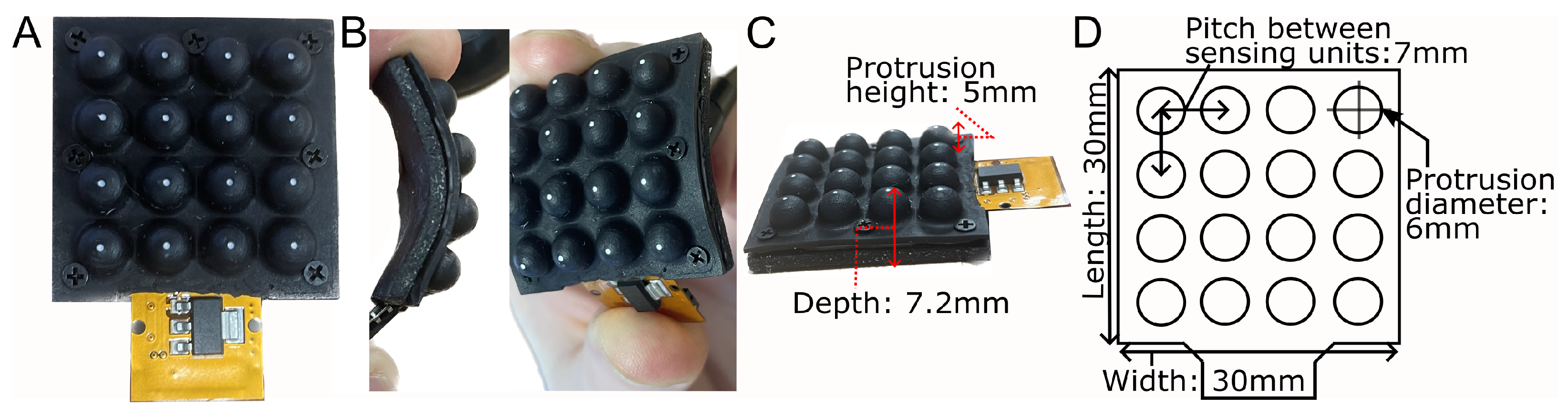
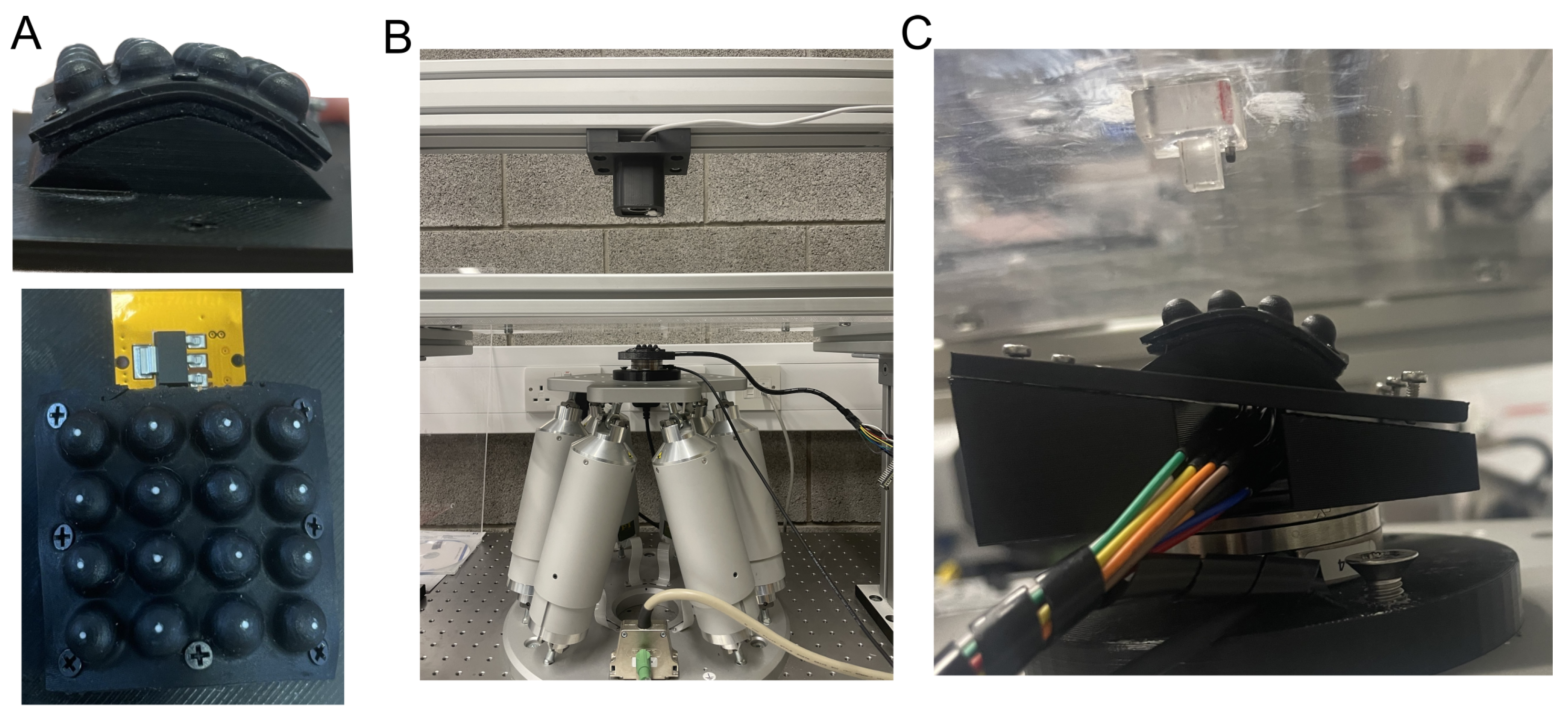
2.1. Design and Fabrication of the Flexible LiVec Sensor
- A 14% decrease in center-to-center sensing unit density (7 mm vs. 8.15 mm).
- A 40% reduction in thickness (7.2 mm vs. 12 mm).
- A more compact design, containing 60% more sensing units (dimensions: 30 × 30 mm2 vs. 38.22 × 26.44 mm2).
- A removal of the rigid top plate and backbone assembly components to allow the sensor to be flexible.
- A flexible PCB.
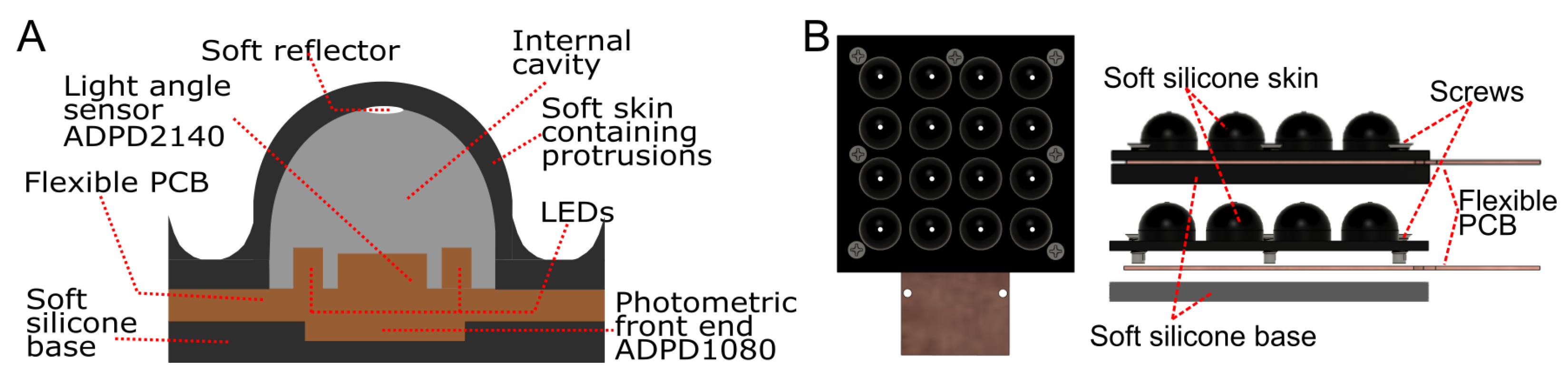
2.1.1. Electronics
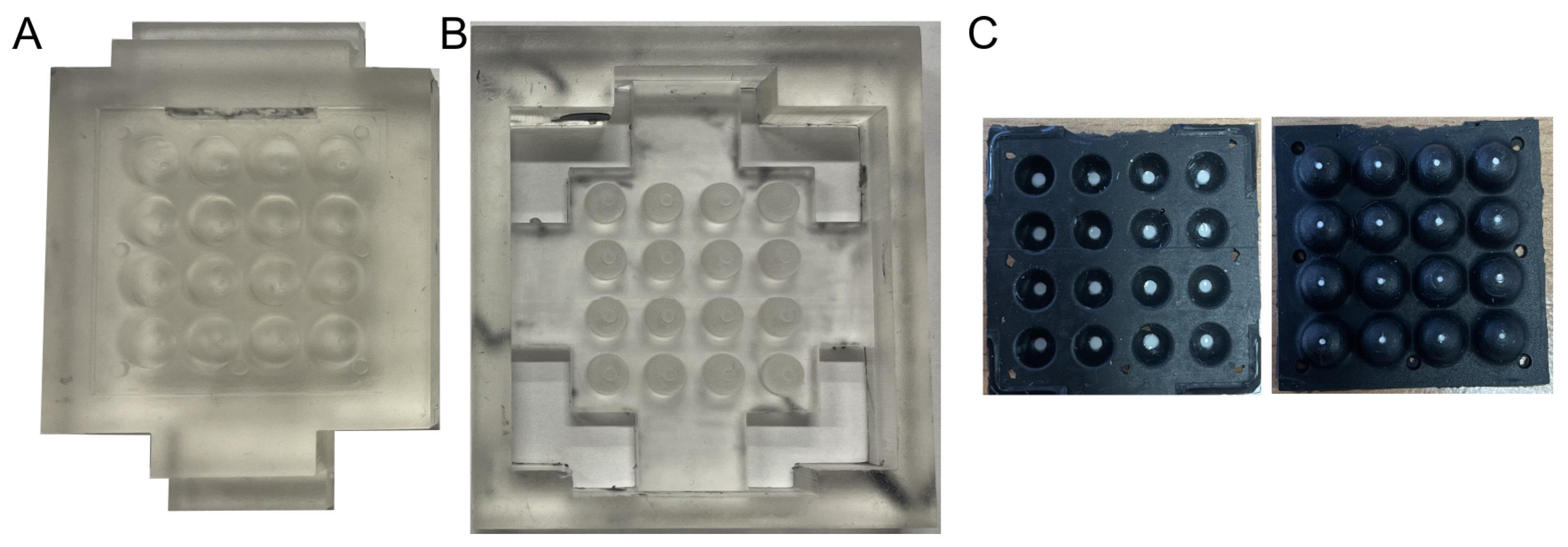
2.1.2. Skin Fabrication
2.1.3. Mechanical Design and Assembly
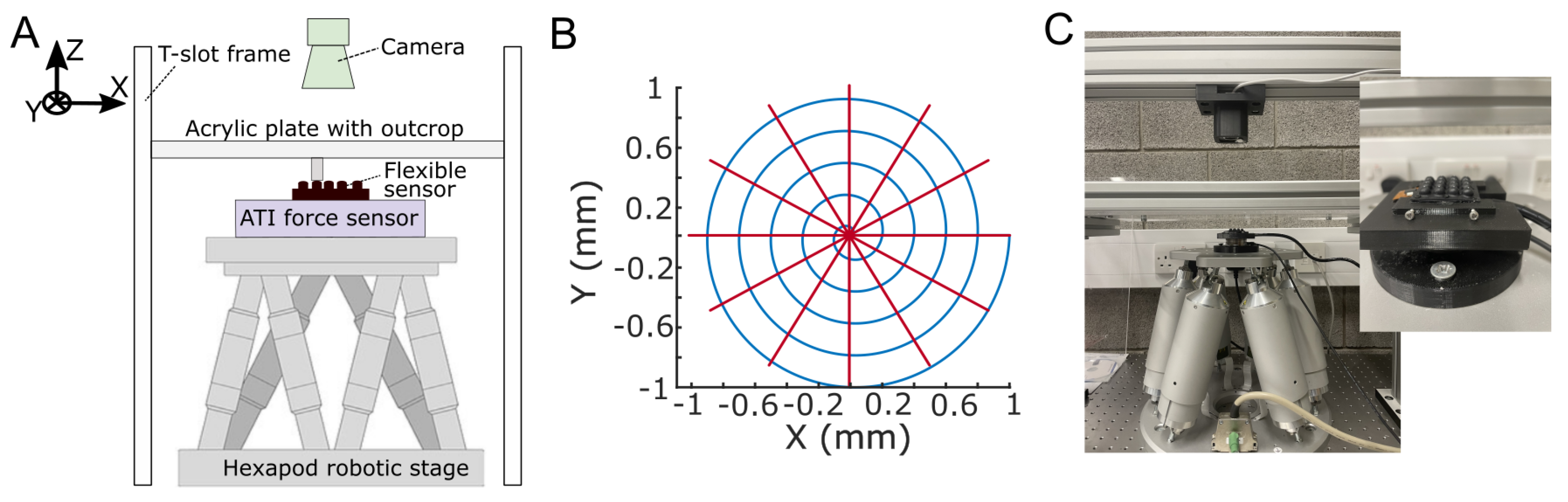
2.2. Local Force and Displacement Calibration Procedures
2.2.1. Calibration Platform
2.2.2. Calibration Procedure
Configurations Tested
Assessment of Calibrations
3. Results
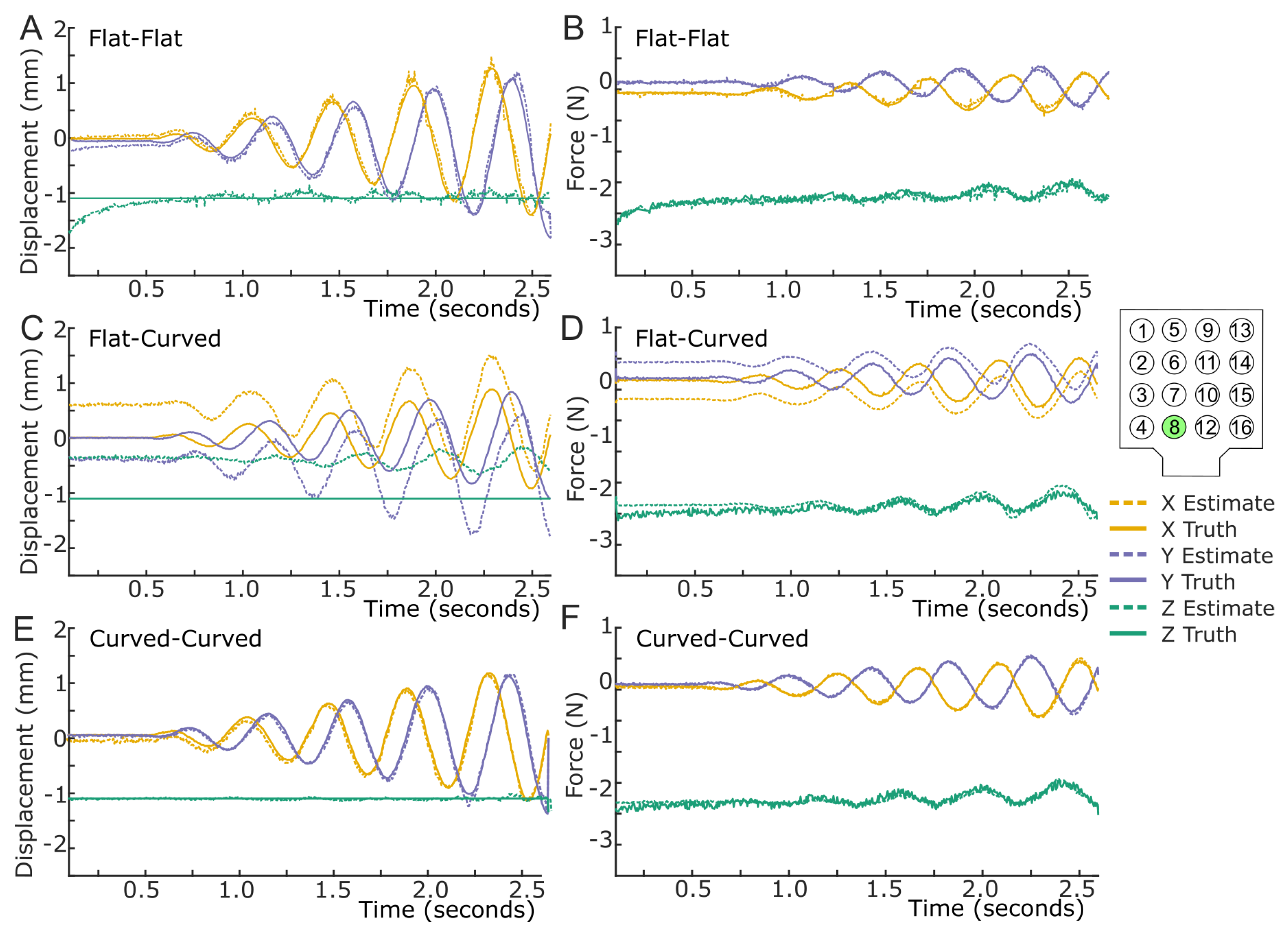
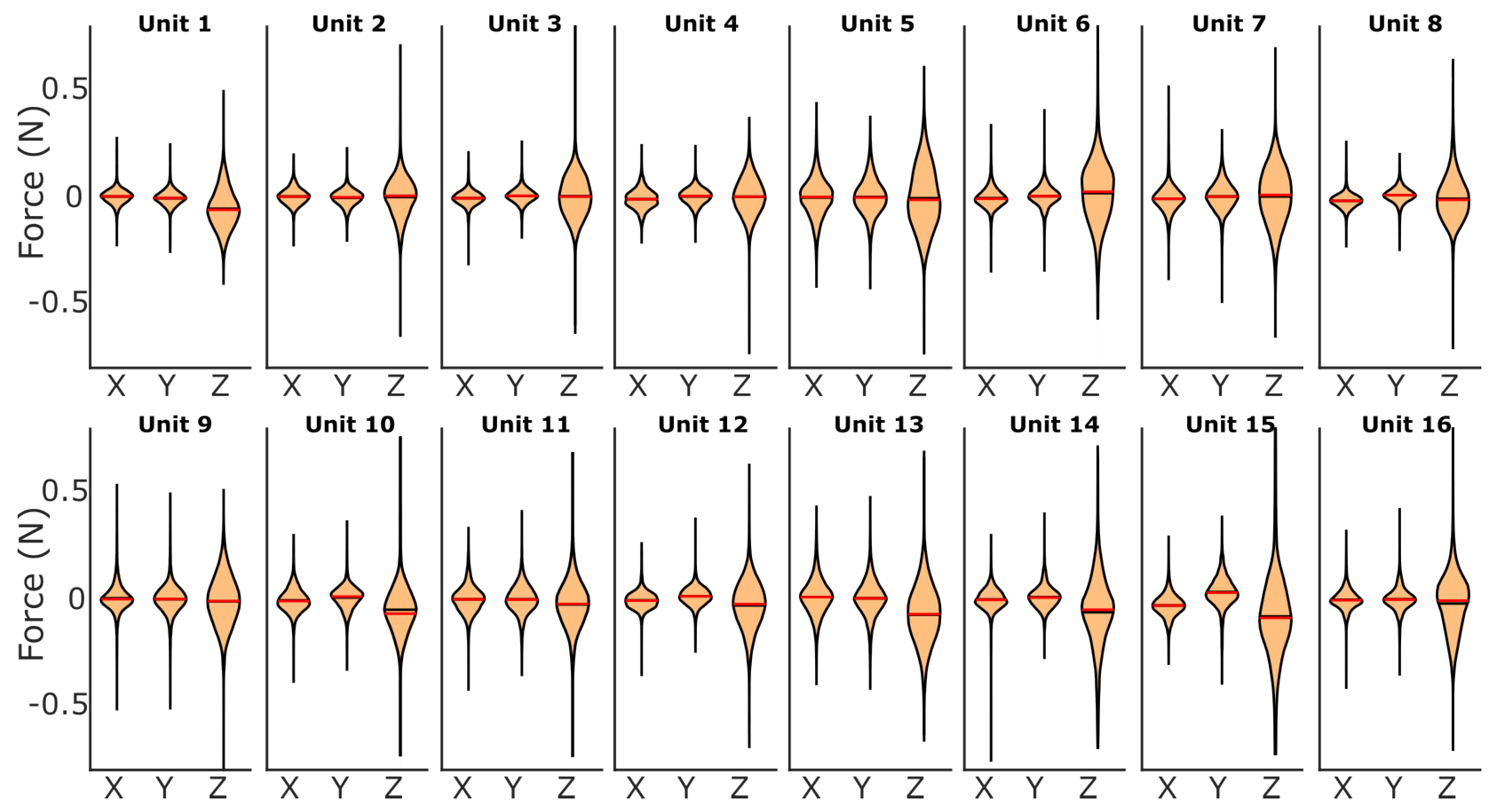
3.1. Three-Dimensional Force and 3D Displacement Validation of Each Sensing Unit
3.1.1. Flat Configuration Sensing Validation
3.1.2. Flexed Configurations Sensing Validation
4. Discussion
4.1. Flexibility
4.2. Sensing Range
4.3. Thickness
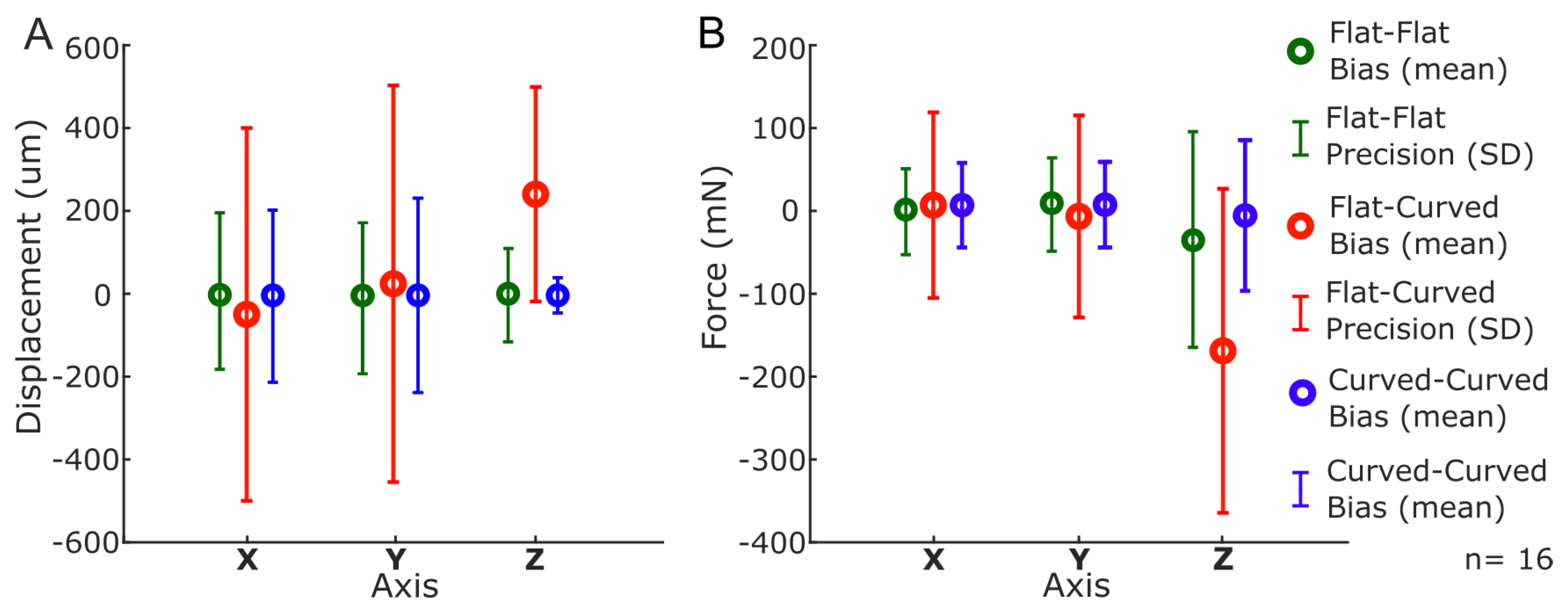
4.4. Measurement Bias and Precision
4.4.1. Flat Testing
4.4.2. Curved Testing
4.5. Limitations and Future Considerations
5. Conclusions
- A thin, flexible, non-camera-based optical tactile sensor that can conform to curved surfaces;
- Crucial insights on how to design and calibrate future iterations of curved LiVec sensors for robotic fingers and palms.
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PCB | Printed circuit board |
| LED | Light-emitting diode |
References
- Dahiya, R.; Metta, G.; Valle, M.; Sandini, G. Tactile Sensing—From Humans to Humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar] [CrossRef]
- Yousef, H.; Boukallel, M.; Althoefer, K. Tactile sensing for dexterous in-hand manipulation in robotics—A review. Sens. Actuators A Phys. 2011, 167, 171–187. [Google Scholar] [CrossRef]
- Or, K.; Morikuni, S.; Ogasa, S.; Funabashi, S.; Schmitz, A.; Sugano, S. A study on fingertip designs and their influences on performing stable prehension for robot hands. In Proceedings of the 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016; pp. 772–777. [Google Scholar] [CrossRef]
- Xia, Z.; Deng, Z.; Fang, B.; Yang, Y.; Sun, F. A review on sensory perception for dexterous robotic manipulation. Int. J. Adv. Robot. Syst. 2022, 19, 17298806221095974. [Google Scholar] [CrossRef]
- Bullock, I.M.; Feix, T.; Dollar, A.M. Analyzing human fingertip usage in dexterous precision manipulation: Implications for robotic finger design. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 1622–1628. [Google Scholar] [CrossRef]
- Bullock, I.M.; Feix, T.; Dollar, A.M. Human precision manipulation workspace: Effects of object size and number of fingers used. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 5768–5772. [Google Scholar] [CrossRef]
- Lepora, N.F. Soft Biomimetic Optical Tactile Sensing With the TacTip: A Review. IEEE Sens. J. 2021, 21, 21131–21143. [Google Scholar] [CrossRef]
- Dong, S.; Yuan, W.; Adelson, E.H. Improved GelSight tactile sensor for measuring geometry and slip. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 137–144. [Google Scholar] [CrossRef]
- Khamis, H.; Izquierdo Albero, R.; Salerno, M.; Shah Idil, A.; Loizou, A.; Redmond, S.J. PapillArray: An incipient slip sensor for dexterous robotic or prosthetic manipulation—Design and prototype validation. Sens. Actuators A Phys. 2018, 270, 195–204. [Google Scholar] [CrossRef]
- Cirillo, A.; Costanzo, M.; Laudante, G.; Pirozzi, S. Tactile Sensors for Parallel Grippers: Design and Characterization. Sensors 2021, 21, 1915. [Google Scholar] [CrossRef]
- Wan, Y.; Wang, Y.; Guo, C.F. Recent progresses on flexible tactile sensors. Mater. Today Phys. 2017, 1, 61–73. [Google Scholar] [CrossRef]
- Ji, J.; Zhao, W.; Wang, Y.; Li, Q.; Wang, G. Templated Laser-Induced-Graphene-Based Tactile Sensors Enable Wearable Health Monitoring and Texture Recognition via Deep Neural Network. ACS Nano 2023, 17, 20153–20166. [Google Scholar] [CrossRef]
- Yang, J.; Li, Z.; Wu, Y.; Shen, Y.; Zhang, M.; Chen, B.; Yuan, G.; Xiao, S.; Feng, J.; Zhang, X.; et al. Non-equilibrium compression achieving high sensitivity and linearity for iontronic pressure sensors. Sci. Bull. 2024, 69, 2221–2230. [Google Scholar] [CrossRef]
- Chen, X.; Luo, Y.; Chen, Y.; Li, S.; Deng, S.; Wang, B.; Zhang, Q.; Li, X.; Li, X.; Wang, C.; et al. Biomimetic Contact Behavior Inspired Tactile Sensing Array with Programmable Microdomes Pattern by Scalable and Consistent Fabrication. Adv. Sci. 2024, 11, 2408082. [Google Scholar] [CrossRef]
- Pyo, S.; Lee, J.; Bae, K.; Sim, S.; Kim, J. Recent Progress in Flexible Tactile Sensors for Human-Interactive Systems: From Sensors to Advanced Applications. Adv. Mater. 2021, 33, 2005902. [Google Scholar] [CrossRef] [PubMed]
- Chang, W.Y.; Fang, T.H.; Yeh, S.H.; Lin, Y.C. Flexible Electronics Sensors for Tactile Multi-Touching. Sensors 2009, 9, 1188–1203. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, X.; Mei, D.; Zhu, L.; Chen, J. Flexible tactile sensor array for distributed tactile sensing and slip detection in robotic hand grasping. Sens. Actuators A Phys. 2019, 297, 111512. [Google Scholar] [CrossRef]
- Wang, Y.; Ding, W.; Mei, D. Development of flexible tactile sensor for the envelop of curved robotic hand finger in grasping force sensing. Measurement 2021, 180, 109524. [Google Scholar] [CrossRef]
- Büscher, G.H.; Kõiva, R.; Schürmann, C.; Haschke, R.; Ritter, H.J. Flexible and stretchable fabric-based tactile sensor. Robot. Auton. Syst. 2015, 63, 244–252. [Google Scholar] [CrossRef]
- Zhu, L.; Wang, Y.; Mei, D.; Jiang, C. Development of Fully Flexible Tactile Pressure Sensor with Bilayer Interlaced Bumps for Robotic Grasping Applications. Micromachines 2020, 11, 770. [Google Scholar] [CrossRef]
- Sygulla, F.; Ellensohn, F.; Hildebrandt, A.C.; Wahrmann, D.; Rixen, D. A flexible and low-cost tactile sensor for robotic applications. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; pp. 58–63. [Google Scholar] [CrossRef]
- Tomo, T.P.; Schmitz, A.; Wong, W.K.; Kristanto, H.; Somlor, S.; Hwang, J.; Jamone, L.; Sugano, S. Covering a Robot Fingertip With uSkin: A Soft Electronic Skin With Distributed 3-Axis Force Sensitive Elements for Robot Hands. IEEE Robot. Autom. Lett. 2018, 3, 124–131. [Google Scholar] [CrossRef]
- Lepora, N.F.; Lin, Y.; Money-Coomes, B.; Lloyd, J. DigiTac: A DIGIT-TacTip Hybrid Tactile Sensor for Comparing Low-Cost High-Resolution Robot Touch. IEEE Robot. Autom. Lett. 2022, 7, 9382–9388. [Google Scholar] [CrossRef]
- Sferrazza, C.; D’Andrea, R. Design, Motivation and Evaluation of a Full-Resolution Optical Tactile Sensor. Sensors 2019, 19, 928. [Google Scholar] [CrossRef]
- Gomes, D.F.; Lin, Z.; Luo, S. GelTip: A Finger-shaped Optical Tactile Sensor for Robotic Manipulation. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 9903–9909. [Google Scholar] [CrossRef]
- Li, H.; Nam, S.; Lu, Z.; Yang, C.; Psomopoulou, E.; Lepora, N.F. BioTacTip: A Soft Biomimetic Optical Tactile Sensor for Efficient 3D Contact Localization and 3D Force Estimation. IEEE Robot. Autom. Lett. 2024, 9, 5314–5321. [Google Scholar] [CrossRef]
- Do, W.K.; Jurewicz, B.; Kennedy, M. DenseTact 2.0: Optical Tactile Sensor for Shape and Force Reconstruction. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 12549–12555. [Google Scholar] [CrossRef]
- Lin, X.; Willemet, L.; Bailleul, A.; Wiertlewski, M. Curvature sensing with a spherical tactile sensor using the color-interference of a marker array. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 603–609. [Google Scholar] [CrossRef]
- Padmanabha, A.; Ebert, F.; Tian, S.; Calandra, R.; Finn, C.; Levine, S. OmniTact: A Multi-Directional High-Resolution Touch Sensor. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 618–624. [Google Scholar] [CrossRef]
- Liu, S.Q.; Adelson, E.H. GelSight Fin Ray: Incorporating Tactile Sensing into a Soft Compliant Robotic Gripper. In Proceedings of the 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), Edinburgh, UK, 4–8 April 2022; pp. 925–931. [Google Scholar] [CrossRef]
- Liu, S.Q.; Ma, Y.; Adelson, E.H. GelSight Baby Fin Ray: A Compact, Compliant, Flexible Finger with High-Resolution Tactile Sensing. In Proceedings of the 2023 IEEE International Conference on Soft Robotics (RoboSoft), Singapore, 3–7 April 2023; pp. 1–8. [Google Scholar] [CrossRef]
- Lambeta, M.; Wu, T.; Sengul, A.; Most, V.R.; Black, N.; Sawyer, K.; Mercado, R.; Qi, H.; Sohn, A.; Taylor, B. Digitizing Touch with an Artificial Multimodal Fingertip. arXiv 2024, arXiv:2411.02479. [Google Scholar]
- Jiang, C.; Zhang, Z.; Pan, J.; Wang, Y.; Zhang, L.; Tong, L. Finger-Skin-Inspired Flexible Optical Sensor for Force Sensing and Slip Detection in Robotic Grasping. Adv. Mater. Technol. 2021, 6, 2100285. [Google Scholar] [CrossRef]
- Leslie, O.; Córdova Bulens, D.; Redmond, S.J. Design, Fabrication, and Characterization of a Novel Optical Six-Axis Distributed Force and Displacement Tactile Sensor for Dexterous Robotic Manipulation. Sensors 2023, 23, 9640. [Google Scholar] [CrossRef] [PubMed]
- Leslie, O.; Bulens, D.C.; Ulloa, P.M.; Redmond, S.J. A Tactile Sensing Concept for 3-D Displacement and 3-D Force Measurement Using Light Angle and Intensity Sensing. IEEE Sens. J. 2023, 23, 21172–21188. [Google Scholar] [CrossRef]
- Khamis, H.; Xia, B.; Redmond, S.J. A novel optical 3D force and displacement sensor—Towards instrumenting the PapillArray tactile sensor. Sens. A Phys. 2019, 291, 174–187. [Google Scholar] [CrossRef]
- Khamis, H.; Xia, B.; Redmond, S.J. Real-time Friction Estimation for Grip Force Control. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 1608–1614. [Google Scholar] [CrossRef]
- Bok, B.G.; Jang, J.S.; Kim, M.S. A Highly Sensitive Multimodal Tactile Sensing Module with Planar Structure for Dexterous Manipulation of Robots. Adv. Intell. Syst. 2023, 5, 2200381. [Google Scholar] [CrossRef]
- Yuan, W.; Dong, S.; Adelson, E.H. GelSight: High-Resolution Robot Tactile Sensors for Estimating Geometry and Force. Sensors 2017, 17, 2762. [Google Scholar] [CrossRef] [PubMed]
- Lepora, N.F.; Church, A.; de Kerckhove, C.; Hadsell, R.; Lloyd, J. From Pixels to Percepts: Highly Robust Edge Perception and Contour Following Using Deep Learning and an Optical Biomimetic Tactile Sensor. IEEE Robot. Autom. Lett. 2019, 4, 2101–2107. [Google Scholar] [CrossRef]
- Contactile Pty Ltd. Contactile: Enabling Robotic Dexterity Through a Sense of Touch. 2023. Available online: https://contactile.com/ (accessed on 3 February 2025).
- Kappassov, Z.; Corrales, J.A.; Perdereau, V. Tactile sensing in dexterous robot hands—Review. Robot. Auton. Syst. 2015, 74, 195–220. [Google Scholar] [CrossRef]
- Zhang, S.; Li, S.; Xia, Z.; Cai, K. A review of electronic skin: Soft electronics and sensors for human health. J. Mater. Chem. B 2020, 8, 852–862. [Google Scholar] [CrossRef]
- Roberts, P.; Zadan, M.; Majidi, C. Soft Tactile Sensing Skins for Robotics. Curr. Robot. Rep. 2021, 2, 343–354. [Google Scholar] [CrossRef]
- Dahiya, R.; Yogeswaran, N.; Liu, F.; Manjakkal, L.; Burdet, E.; Hayward, V.; Jörntell, H. Large-Area Soft e-Skin: The Challenges Beyond Sensor Designs. Proc. IEEE 2019, 107, 2016–2033. [Google Scholar] [CrossRef]
- Donlon, E.; Dong, S.; Liu, M.; Li, J.; Adelson, E.; Rodriguez, A. GelSlim: A High-Resolution, Compact, Robust, and Calibrated Tactile-sensing Finger. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1927–1934. [Google Scholar] [CrossRef]
- Lambeta, M.; Chou, P.W.; Tian, S.; Yang, B.; Maloon, B.; Most, V.R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; et al. DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor With Application to In-Hand Manipulation. IEEE Robot. Autom. Lett. 2020, 5, 3838–3845. [Google Scholar] [CrossRef]
- GelSight Inc. GS_Mini_4.3.24; Data Sheet; GelSight Inc.: Waltham, MA, USA, 2023. [Google Scholar]
- Taylor, I.H.; Dong, S.; Rodriguez, A. GelSlim 3.0: High-Resolution Measurement of Shape, Force and Slip in a Compact Tactile-Sensing Finger. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 10781–10787. [Google Scholar] [CrossRef]
- Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V.R.; Kammerer, G.; Speidel, S.; Fan, R.E.; et al. DIGIT Pinki: Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors. In Proceedings of the International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 13–17 May 2024. [Google Scholar]
- Zhang, Y.; Chen, X.; Wang, M.Y.; Yu, H. Multidimensional Tactile Sensor with a Thin Compound Eye-Inspired Imaging System. Soft Robotics 2022, 9, 861–870. [Google Scholar] [CrossRef]
- ATI Industrial Automation. Operational Recommendations for Reducing F/T Sensor Output Drift. Technical Report. Available online: www.ati-ia.com (accessed on 3 February 2025).
- ATI Industrial Automation. F/T Sensor: Nano17. Technical Report. 2023. Available online: www.ati-ia.com/products (accessed on 3 February 2025).
- Yang, Y.J.; Cheng, M.Y.; Chang, W.Y.; Tsao, L.C.; Yang, S.A.; Shih, W.P.; Chang, F.Y.; Chang, S.H.; Fan, K.C. An integrated flexible temperature and tactile sensing array using PI-copper films. Sens. A Phys. 2008, 143, 143–153. [Google Scholar] [CrossRef]
- Chavez, F.J.A.; Nava, G.; Traversaro, S.; Nori, F.; Pucci, D. Model Based In Situ Calibration with Temperature compensation of 6 axis Force Torque Sensors. arXiv 2018, arXiv:1812.00650. [Google Scholar]
- Redmond, S.; Córdova Bulens, D.; Leslie, O.; Martinez Ulloa, P. Optical Sensor Device. UK Patent EP4526638A1, 20 May 2023. Available online: https://patents.google.com/patent/EP4526638A1/en (accessed on 3 February 2025).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Unit Displacement | Sensor Unit Force | |||||
|---|---|---|---|---|---|---|
| Train Dataset | Test Dataset | Axis | Mean Bias () (μm) | Mean Precision () (μm) | Mean Bias () (mN) | Mean Precision () (mN) |
| X | −3.62 | 180.89 | −0.86 | 24.99 | ||
| Flat | Flat | Y | 3.83 | 172.26 | 2.09 | 53.56 |
| Z | −1.36 | 109.00 | −2.78 | 135.33 | ||
| X | −59.63 | 449.97 | 6.93 | 112.02 | ||
| Flat | Curved | Y | 24.13 | 478.72 | −6.65 | 121.93 |
| Z | 248.57 | 258.90 | −171.19 | 195.60 | ||
| X | 1.58 | 221.61 | 1.04 | 54.49 | ||
| Curved | Curved | Y | 0.29 | 247.74 | −0.32 | 55.16 |
| Z | −1.99 | 44.93 | −1.31 | 97.15 | ||
| Sensor | 1. This work | 2. | 3. Omnitact | 4. Digit360 | 5. uSkin | 6. | 7. | 8. | 9. | 10. |
|---|---|---|---|---|---|---|---|---|---|---|
| Transduction principle | Optical | Optical | Optical–Camera | Optical–camera | Magnetic | Capacitive | Capacitive | Piezo-resistive | Piezo-resistive | Piezo-resistive |
| Number of sensitive elements | 16 | 1 | — | ≈8.3 million | 24 | 9 | 18 | 54 | 16 | 3 |
| Sensor shape | Square grid | Square | Cylindrical | Cylindrical | Envelope fingertip | Square grid | Whole phalanx of finger | Hand shape | Square grid | Whole phalanx of finger |
| Thickness (mm) | 7.2 | 2.0 | 33 † | 33 †† | 6.05 | 1.4 | 4 ††† | — | — | — |
| Robotic gripper integration | N/A | N/A | Two custom-built 3D printed phalange grippers | Custom multi-finger robot hand | Allegro hand fingertip | ReFlex three-finger robot | i-limb robotic hand | Tactile glove | N/A | Humanoid robotic hand |
| Measure-ments | Three-axis force Three-axis displacement Vibration | Three-axis force | Normal force Shear force | Normal force Shear force Vibration | Three-axis force | Three-axis force | Three-axis force | Normalpressure | Normal pressure | Distributed pressure |
| Force precision (mN) | Fx: 25 Fy: 54 Fz: 135 | 1.6% *** | — | Fx/Fy: 1.27 Fz: 1.01 | — | Fx: 0.471 * Fy: 0.466 * Fz: 0.201 * | Fx: 1.59 * Fy: 1.49 * Fz: 1.87 * | — | — | Fx/Fy: 3.4% Fz: 1.32% ** |
| Sensing range | Fx/Fy:±1 N Fz: 0–35 N | 1–10 N | — | Fx/Fy: <20 N Fz: <40 N | Fz: 7 N | Fx/Fy: 0.6 N Fz: 0.1–15 N | Fx/Fy:±1 N Fz: 0.1–3 N | 1–500 kPa | 0–70 kPa | Fx/Fy: 0–150 kPa Fz: 0–200 kPa |
| Publication year | 2025 | 2021 | 2020 | 2024 | 2018 | 2019 | 2021 | 2015 | 2017 | 2020 |
| Reference | — | [33] | [29] | [32] | [22] | [17] | [18] | [19] | [21] | [20] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leslie, O.; Córdova Bulens, D.; Redmond, S.J. On the Feasibility of Adapting the LiVec Tactile Sensing Principle to Non-Planar Surfaces: A Thin, Flexible Tactile Sensor. Sensors 2025, 25, 2544. https://doi.org/10.3390/s25082544
Leslie O, Córdova Bulens D, Redmond SJ. On the Feasibility of Adapting the LiVec Tactile Sensing Principle to Non-Planar Surfaces: A Thin, Flexible Tactile Sensor. Sensors. 2025; 25(8):2544. https://doi.org/10.3390/s25082544
Chicago/Turabian StyleLeslie, Olivia, David Córdova Bulens, and Stephen J. Redmond. 2025. "On the Feasibility of Adapting the LiVec Tactile Sensing Principle to Non-Planar Surfaces: A Thin, Flexible Tactile Sensor" Sensors 25, no. 8: 2544. https://doi.org/10.3390/s25082544
APA StyleLeslie, O., Córdova Bulens, D., & Redmond, S. J. (2025). On the Feasibility of Adapting the LiVec Tactile Sensing Principle to Non-Planar Surfaces: A Thin, Flexible Tactile Sensor. Sensors, 25(8), 2544. https://doi.org/10.3390/s25082544