


Drone’s Angle-of-Arrival Estimation Using a Switched-Beam Antenna and Single-Channel Receiver †


Abstract
1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Signal Type | Estimation Method | Average Error (°) | Setup |
|---|---|---|---|---|
| ArrayTrack [27] | CSI-based | PDoA | 7.4 | Multi-receiver |
| SpotFi [28] | CSI-based | PDoA + MUSIC | <5 | Multi-receiver |
| Phaser [29] | CSI-based | PDoA + Autocalibration | 20/ 2 | Single-receiver/ Multi-receiver |
| Batuhan Kaplan [34] | Drone’s FHSS | PDoA + MUSIC + Autocalibration | 1.39 | Multi-receiver |
| Phuc Nguyen [39] | Drone’s video | Power-based Rotating single antenna | 12.2 | Single-receiver |
| Antonello Florio [31] | CW | Phase interferometry (Full-digital) | 0.34 | Multi-receiver (4-ch FPGA) |
| This Work | Drones’ video | Power-based + Switched-beam Antenna (SBA) | <5 | Single-receiver |
2. Proposed System Configuration and Operating Principle
3. System Implementation and Signal Processing
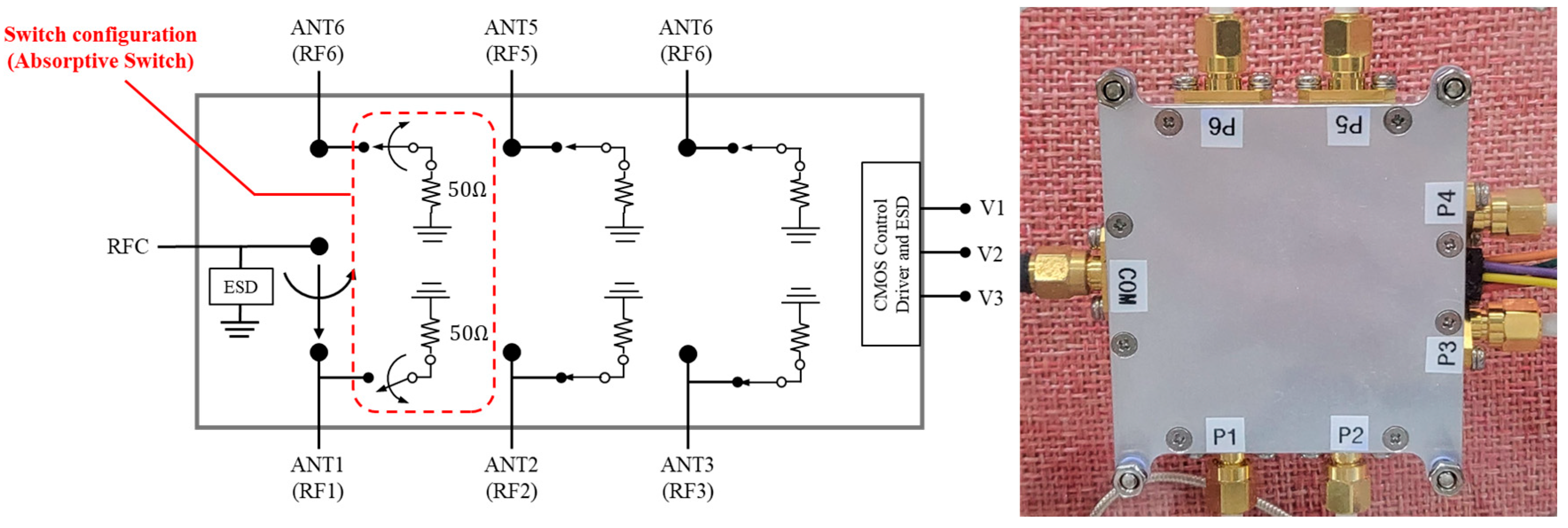
3.1. Hardware Configuration
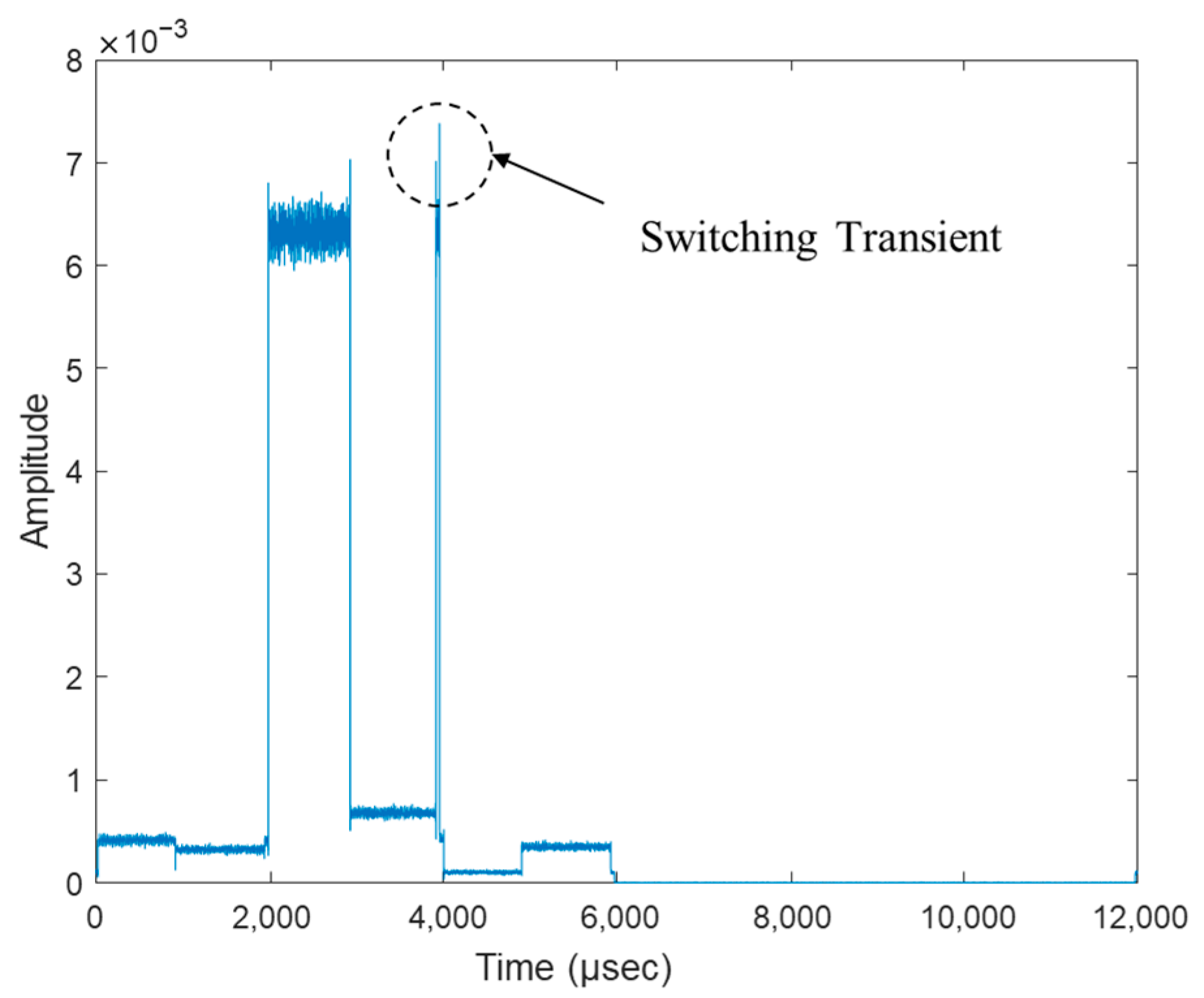
3.2. Singal Processing Unit Implementation
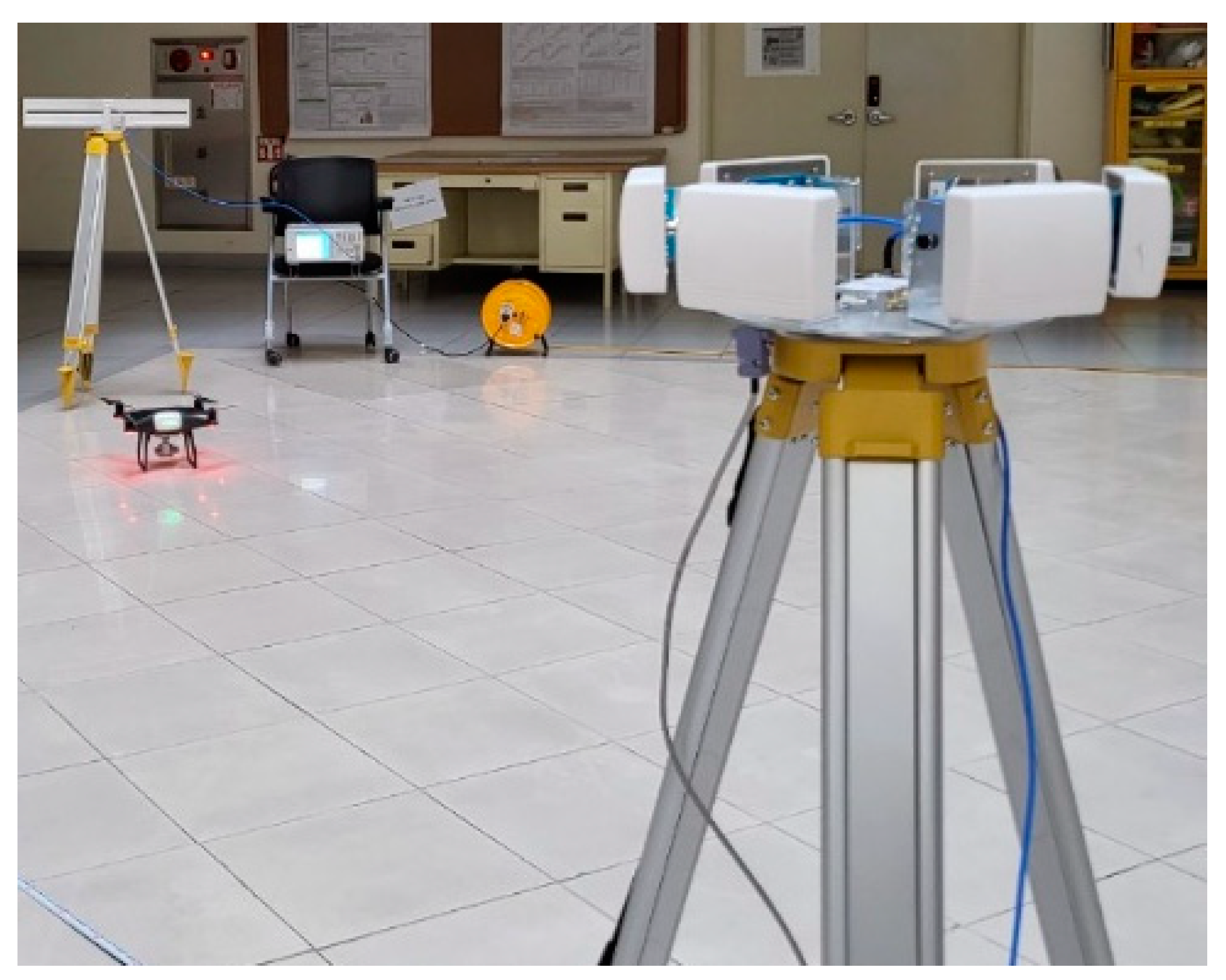
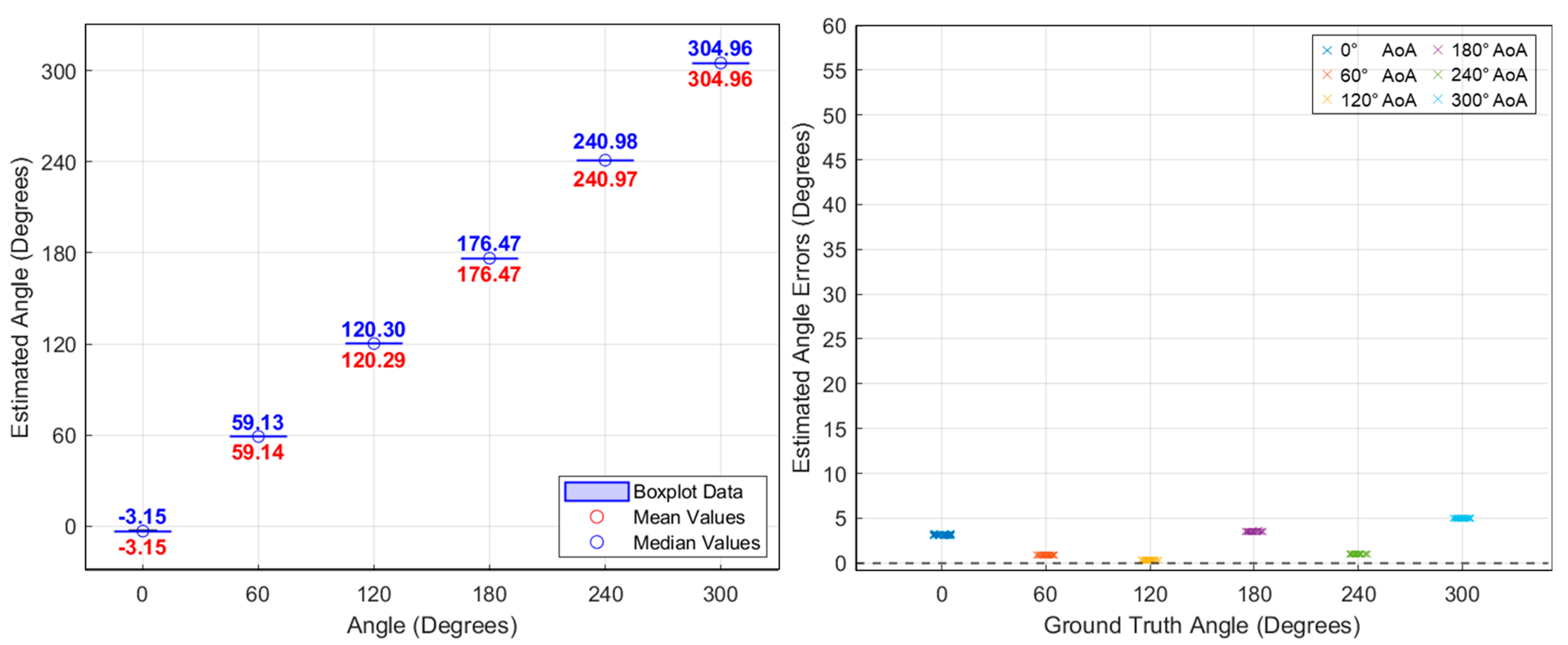
4. Experimental Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AOA | Angle of Arrival |
| UAV | Unmanned Aerial Vehicle |
| ToA | Time of Arrival |
| TDoA | Time Difference of Arrival |
| RSS | Received Signal Strength |
| PDoA | Phase Difference of Arrival |
| MUSIC | Multiple Signal Classification |
| ESPRIT | Estimation of Signal Parameters via Rotational Invariance Technique |
| CSI | Channel State Information |
| SDR | Software-defined Radio |
| FPGA | Field-programmable Gate Array |
| OFDM | Orthogonal Frequency Division Multiplexing |
| FHSS | Frequency Hopping Spread Spectrum |
| SBA | Switched-beam Antenna |
| RF | Radio Frequency |
| CW | Continuous Wave |
| SP6T | Single-pole 6-throw |
References
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Liu, P.; Chen, A.Y.; Huang, Y.-N.; Han, J.-Y.; Lai, J.-S.; Kang, S.-C.; Wu, T.-H.; Wen, M.-C.; Tsai, M.-H. A Review of Rotorcraft Unmanned Aerial Vehicle (UAV) Developments and Applications in Civil Engineering. Smart Struct. Syst. 2014, 13, 1065–1094. [Google Scholar] [CrossRef]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A Comprehensive Review of Applications of Drone Technology in the Mining Industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Jawad, Y.; Huma, Z.; Marahm, A.; Maha, Y. Drone and Controller Detection and Localization: Trends and Challenges. Appl. Sci. 2022, 12, 12612. [Google Scholar] [CrossRef]
- Almasri, S.A.; Johannsen, N.L.; Hoeher, P.A. Direction-of-Arrival Estimation for Unmanned Aerial Vehicles and Aircraft Transponders Using a Multi-Mode Multi-Port Antenna. Sensors 2024, 24, 3452. [Google Scholar] [CrossRef] [PubMed]
- Wan, P.; Huang, Q.; Lu, G.; Wang, J.; Yan, Q.; Chen, Y. Passive Localization of Signal Source Based on UAVs in Complex Environment. China Commun. 2020, 17, 230–242. [Google Scholar] [CrossRef]
- Cvitanić, D. Drone application in transportation. In Proceedings of the 2020 5th International Conference on Smart and Sustainable Technologies (SpliTech), Split, Croatia, 23–26 September 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Wang, Y.; Ho, K.C. An Asymptotically Efficient Estimator in Closed-Form for 3-D AOA Localization Using a Sensor Network. IEEE Trans. Wirel. Commun. 2015, 14, 6524–6535. [Google Scholar] [CrossRef]
- Coluccia, A.; Parisi, G.; Fascista, A. Detection and Classification of Multirotor Drones in Radar Sensor Networks: A Review. Sensors 2020, 20, 4172. [Google Scholar] [CrossRef]
- Bouzayene, I.; Mabrouk, K.; Gharsallah, A.; Kholodnyak, D. Scan Radar Using an Uniform Rectangular Array for Drone Detection with Low RCS. In Proceedings of the 2019 IEEE 19th Mediterranean Microwave Symposium (MMS), Hammamet, Tunisia, 31 October–2 November 2019. [Google Scholar] [CrossRef]
- Martinez, J.; Kopyto, D.; Schütz, M.; Vossiek, M. Convolutional Neural Network Assisted Detection and Localization of UAVs with a Narrowband Multi-site Radar. In Proceedings of the 2018 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Munich, Germany, 15–17 April 2018. [Google Scholar] [CrossRef]
- Kwag, Y.-K.; Woo, I.-S.; Kwak, H.-Y.; Jung, Y.-H. Multi-Mode SDR Radar Platform for Small Air-Vehicle Drone Detection. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016. [Google Scholar] [CrossRef]
- Shi, Z.; Chang, X.; Yang, C.; Wu, Z.; Wu, J. An Acoustic-Based Surveillance System for Amateur Drones Detection and Localization. IEEE Trans. Veh. Technol. 2020, 69, 2731–2739. [Google Scholar] [CrossRef]
- Pham, G.N.; Nguyen, P.H. Drone Detection Experiment Based on Image Processing And Machine Learning. Int. J. Sci. Technol. Res. 2020, 9, 2965–2971. [Google Scholar]
- Aouladhadj, D.; Kpre, E.; Deniau, V.; Kharchouf, A.; Gransart, C.; Gaquière, C. Drone Detection and Tracking Using RF Identification Signals. Sensors 2023, 23, 7650. [Google Scholar] [CrossRef] [PubMed]
- Shi, B.; Li, Y.; Wu, G.; Chen, R.; Yan, S.; Shu, F. Low-complexity three-dimensional AOA-cross geometric center localization methods via multi-UAV network. Drones 2023, 7, 318. [Google Scholar] [CrossRef]
- Han, S.; Kim, U.; Jang, B.J. Low-Cost Real Time Anti-Drone RF Scanner Using Switched Array Beamformer. In Proceedings of the 2024 International Symposium on Antennas and Propagation (ISAP), Incheon, Republic of Korea, 5–8 November 2024; IEEE: New York, NY, USA, 2024. [Google Scholar] [CrossRef]
- Bisio, I.; Caribotto, C.; Lavagetto, F. Blind Detection: Advanced Techniques for WiFi-Based Drone Surveillance. IEEE Trans. Veh. Technol. 2019, 68, 938–946. [Google Scholar] [CrossRef]
- Flak, P. Drone Detection Sensor with Continuous 2.4 GHz ISM Band Coverage Based on Cost-Effective SDR Platform. IEEE Access 2021, 9, 114574–114586. [Google Scholar] [CrossRef]
- Al-Sa’d, M.F. RF-based drone detection and identification using deep learning approaches: An initiative towards a large open-source drone database. Future Gener. Comput. Syst. 2019, 26, 104313. [Google Scholar] [CrossRef]
- Nguyen, P.; Truong, H.; Ravindranathan, M.; Nguyen, A.; Han, R.; Vu, T. Matthan: Drone presence detection by identifying physical signatures in the drone’s RF communication. In Proceedings of the 15th Annual International Conference on Mobile Systems, Applications, and Services (MobiSys’17), Niagara Falls, NY, USA, 19–23 June 2017; pp. 211–224. [Google Scholar] [CrossRef]
- Zhang, Y. RF-based Drone Detection using Machine Learning. In Proceedings of the 2021 2nd International Conference on Computing and Data Science (CDS), Stanford, CA, USA, 29–31 January 2021. [Google Scholar] [CrossRef]
- Fu, H.; Abeywickrama, S.; Zhang, L.; Yuen, C. Low-Complexity Portable Passive Drone Surveillance via SDR-Based Signal Processing. IEEE Commun. Mag. 2018, 56, 112–118. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, C.; He, Z.; Wu, Z. Application of auxiliary classifier wasserstein generative adversarial networks in wireless signal classification of illegal unmanned aerial vehicles. Appl. Sci. 2018, 8, 2664. [Google Scholar] [CrossRef]
- Suryavanshi, N.B.; Reddy, K.V.; Chandrika, V.R. Direction Finding Capability in Bluetooth 5.1 Standard. In Proceedings of the Ubiquitous Communications and Network Computing (UBICNET 2019), Bengaluru, India, 8–9 February 2019; pp. 53–65. [Google Scholar] [CrossRef]
- Shin, J.; Jang, B. Implementation of a Bluetooth 5.1 Angle of Departure (AoD) Direction Finding System Using an Software-Defined Radio (SDR). J. Korean Inst. Electromagn. Eng. Sci. 2021, 32, 644–650. [Google Scholar] [CrossRef]
- Xiong, J.; Jamieson, K. ArrayTrack: A Fine-Grained Indoor Location System. In Proceedings of the 10th USENIX Conference on Networked Systems Design and Implementation (NSDI’13), Lombard, IL, USA, 2–5 April 2013; USENIX Association: Berkeley, CA, USA, 2013; pp. 71–84. [Google Scholar]
- Kotaru, M.; Joshi, K.; Bharadia, D.; Katti, S. SpotFi: Decimeter Level Localization Using WiFi. In Proceedings of the 2015 ACM Conference on Special Interest Group on Data Communication (SIGCOMM ’15), London, UK, 17–21 August 2015; ACM: New York, NY, USA, 2015; pp. 269–282. [Google Scholar] [CrossRef]
- Gjengset, J.; Xiong, J.; McPhillips, G.; Jamieson, K. Phaser: Enabling Phased Array Signal Processing on Commodity WiFi Access Points. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking (MobiCom’14), Maui, HI, USA, 7–11 September 2014; ACM: New York, NY, USA, 2014; pp. 153–164. [Google Scholar] [CrossRef]
- Florio, A.; Avitabile, G.; Coviello, G. Digital Phase Estimation through an I/Q Approach for Angle of Arrival Full-Hardware Localization. In Proceedings of the 2020 IEEE Asia Pacific Conference on Circuits and Systems (APCCAS), Ha Long, Vietnam, 8–10 December 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Florio, A.; Avitabile, G.; Talarico, C.; Coviello, G. A Reconfigurable Full-Digital Architecture for Angle of Arrival Estimation. IEEE Trans. Circuits Syst. I Regul. Pap. 2024, 71, 1443–1455. [Google Scholar] [CrossRef]
- Sharma, A.; Vanjani, P. Communication and networking technologies for UAVs: A survey. J. Netw. Comput. Appl. 2020, 168, 102739. [Google Scholar] [CrossRef]
- Kim, S.-G.; Noh, Y.-H.; Hong, I.-P.; Yook, J.-G. Stepwise RF Measurement Method for the Analysis of Drone’s Communication Signals. J. Korean Inst. Electromagn. Eng. Sci. 2021, 32, 370–376. [Google Scholar] [CrossRef]
- Kaplan, B.; Kahraman, İ.; Ekti, A.R.; Yarkan, S.; Görçin, A.; Özdemir, M.K.; Çırpan, H.A. Detection, Identification, and Direction of Arrival Estimation of Drone FHSS Signals with Uniform Linear Antenna Array. IEEE Access 2021, 9, 152057–152072. [Google Scholar] [CrossRef]
- Maddio, S.; Passafiume, M.; Cidronali, A.; Manes, G. A closed-form formula for RSSI-based DoA estimation with switched beam antennas. In Proceedings of the 2015 European Radar Conference, Paris, France, 9–11 September 2015. [Google Scholar] [CrossRef]
- Pohlmann, R.; Zhang, S.; Jost, T.; Dammann, A. Power-based direction-of-arrival estimation using a single multi-mode antenna. In Proceedings of the Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2017. [Google Scholar] [CrossRef]
- Gross, F. Smart Antennas for Wireless Communications with MATLAB; McGraw-Hill: New York, NY, USA, 2005. [Google Scholar]
- Maddio, S.; Passafiume, M.; Cidronali, A.; Manes, G. A scalable distributed positioning system augmenting Wi-Fi technology. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbéliard, France, 28–31 October 2013. [Google Scholar] [CrossRef]
- Nguyen, P.; Kim, T.; Miao, J.; Hesselius, D.; Kenneally, E.; Massey, D.; Frew, E.; Han, R.; Vu, T. Towards RF-based localization of a drone and its controller. In Proceedings of the 5th Workshop on Micro Aerial Vehicle Networks, Systems, and Applications (DroNet’19), Seoul, Republic of Korea, 17–21 June 2019; ACM: New York, NY, USA, 2019; pp. 21–26. [Google Scholar] [CrossRef]
- Ettus Research. USRP B200/B210 Bus Series Datasheet; Ettus Research: Santa Clara, CA, USA, 2019; Available online: https://www.ettus.com/wp-content/uploads/2019/01/b200-b210_spec_sheet.pdf (accessed on 28 February 2025).
- pSemi. PE426462 UltraCMOS® SP6T RF Switch, 10 MHz–8 GHz, Product Specification; Doc. No. PE426462; pSemi: San Diego, CA, USA, 2020; Available online: https://www.psemi.com/pdf/datasheets/pe426462.pdf (accessed on 28 February 2025).
- Florio, A.; Avitabile, G.; Coviello, G. A Linear Technique for Artifacts Correction and Compensation in Phase Interferometric Angle of Arrival Estimation. Sensors 2022, 22, 1427. [Google Scholar] [CrossRef] [PubMed]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, S.; Jang, B.-J. Drone’s Angle-of-Arrival Estimation Using a Switched-Beam Antenna and Single-Channel Receiver. Sensors 2025, 25, 2376. https://doi.org/10.3390/s25082376
Han S, Jang B-J. Drone’s Angle-of-Arrival Estimation Using a Switched-Beam Antenna and Single-Channel Receiver. Sensors. 2025; 25(8):2376. https://doi.org/10.3390/s25082376
Chicago/Turabian StyleHan, Sumin, and Byung-Jun Jang. 2025. "Drone’s Angle-of-Arrival Estimation Using a Switched-Beam Antenna and Single-Channel Receiver" Sensors 25, no. 8: 2376. https://doi.org/10.3390/s25082376
APA StyleHan, S., & Jang, B.-J. (2025). Drone’s Angle-of-Arrival Estimation Using a Switched-Beam Antenna and Single-Channel Receiver. Sensors, 25(8), 2376. https://doi.org/10.3390/s25082376