
A Heavy Metal Ion Water Quality Detection Model Based on Spectral Analysis: New Methods for Enhancing Detection Speed and Visible Spectral Denoising
Abstract
1. Introduction
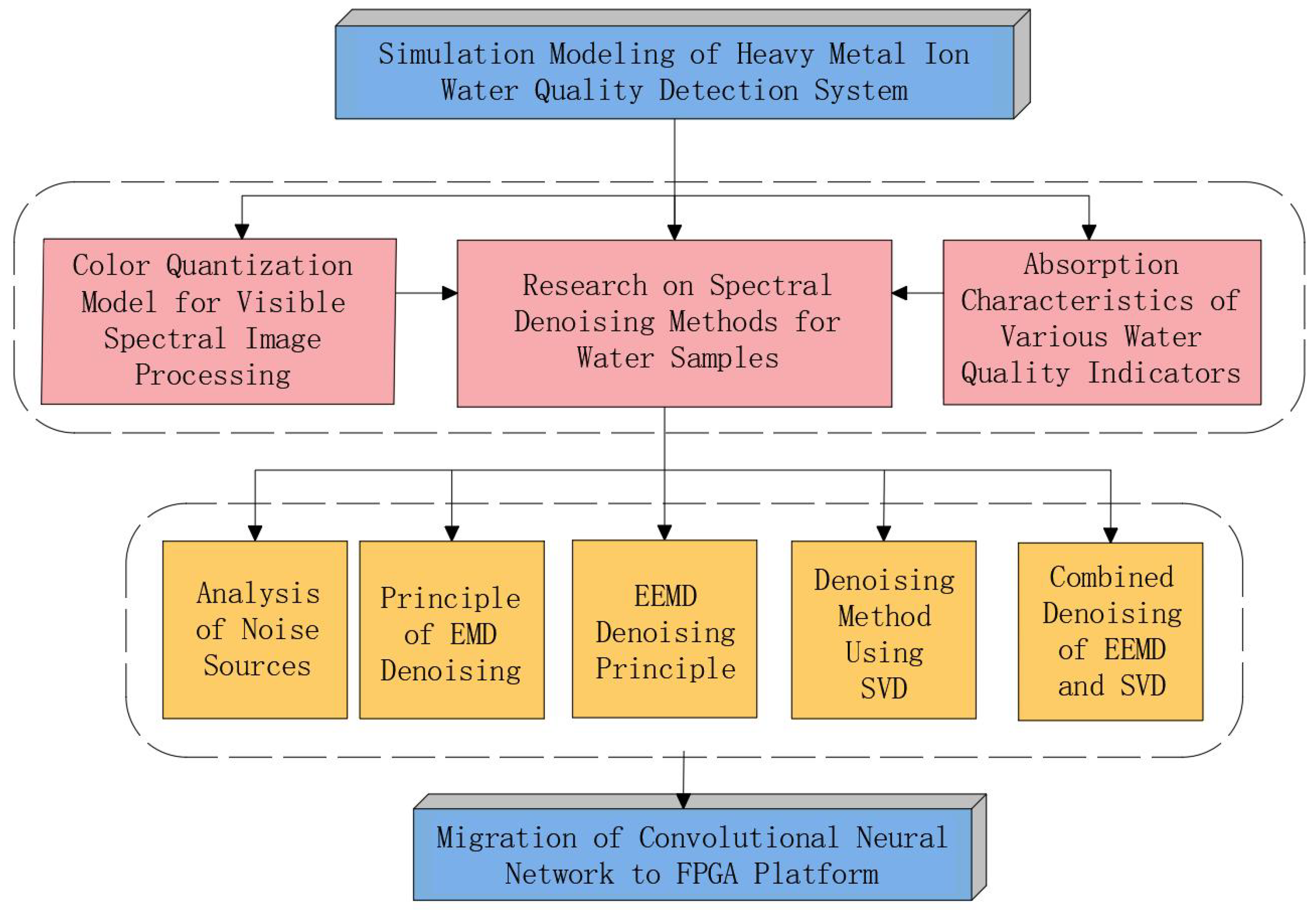
2. Simulation Modeling of the Water Quality Detection System
2.1. Visible Spectroscopy
2.2. Absorption Characteristics of Water Quality Indicators
2.3. Common Color Quantization Models and Denoising Methods in Image Processing
2.4. Principle of EEMD-SVD Spectral Denoising Method
2.4.1. Principle of EMD Denoising
2.4.2. Principle of EEMD Denoising
- Add a random Gaussian white noise sequence of the same length to the original signal , ensuring that the added noise maintains the variance and has a mean value of zero. This will result in a signal sequence that contains white noise, as shown below:
- Using the EMD theory to decompose , a set of Intrinsic Mode Functions (IMFs) and (the residual component) will be generated, as shown in (5).
- Repeat the previous two steps to obtain m instances of , as shown in (6).
- Divide the average of all the IMFs by the added white noise from to obtain the final results, as shown in (7) and (8).
- The original signal can be recovered by removing the added white noise, as shown in (1–10).
2.4.3. Denoising Method Based on SVD
2.4.4. Application of EEMD-SVD Denoising Scheme in Water Quality Detection
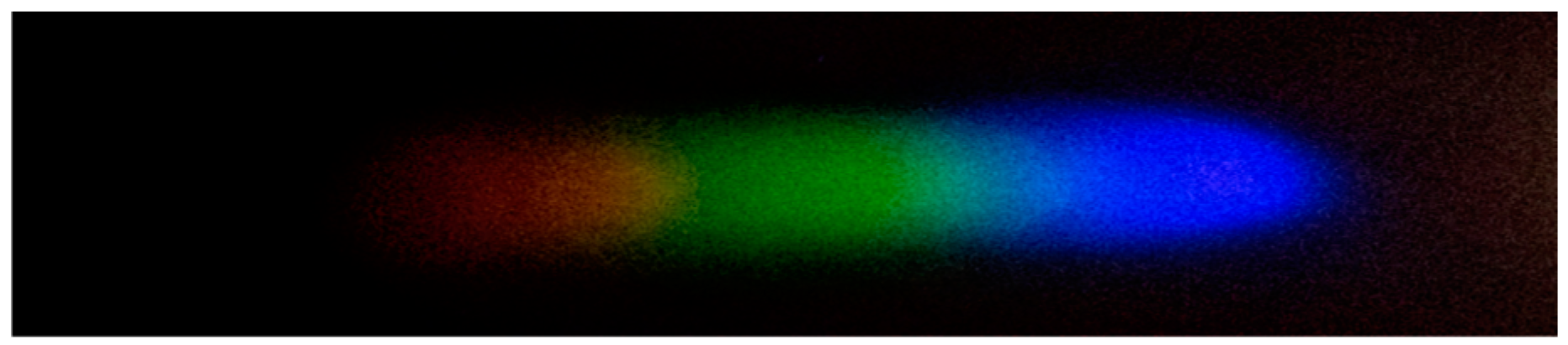
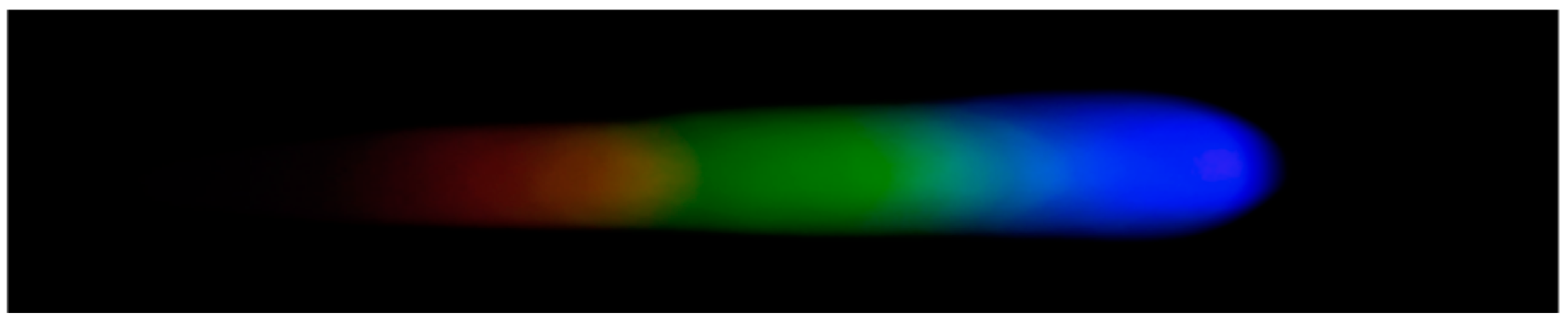
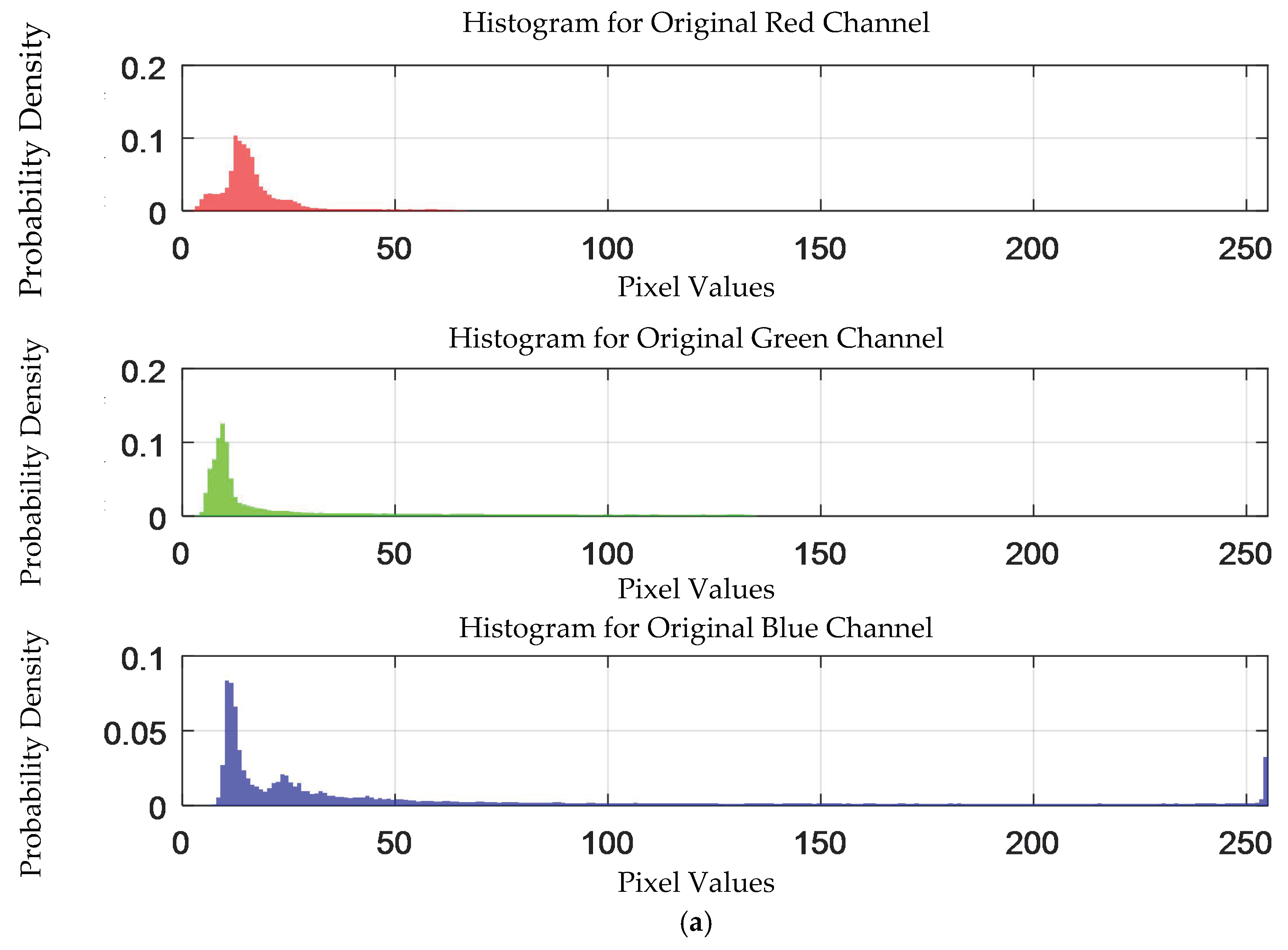
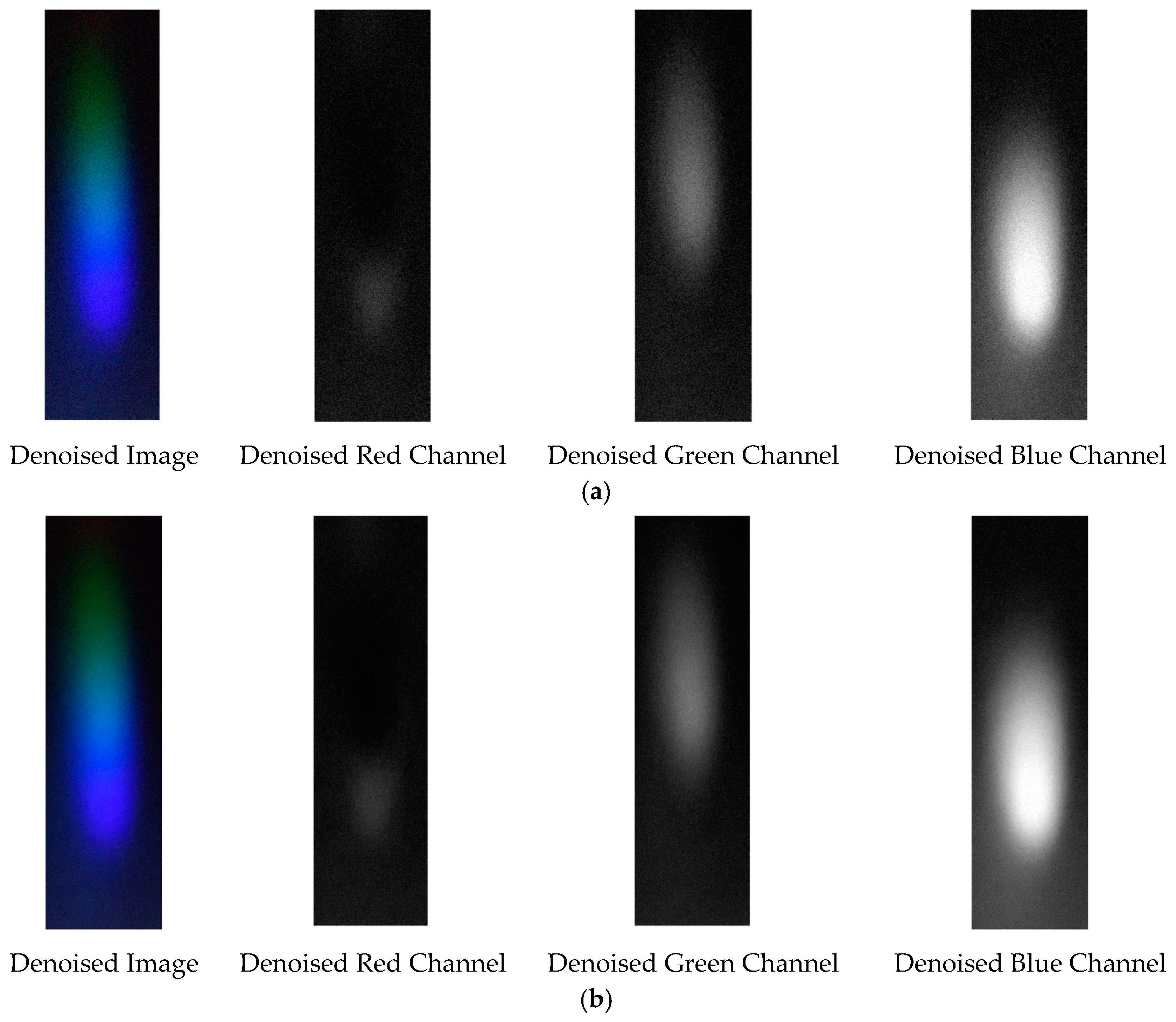
2.4.5. Processing and Analysis of Spectral Images
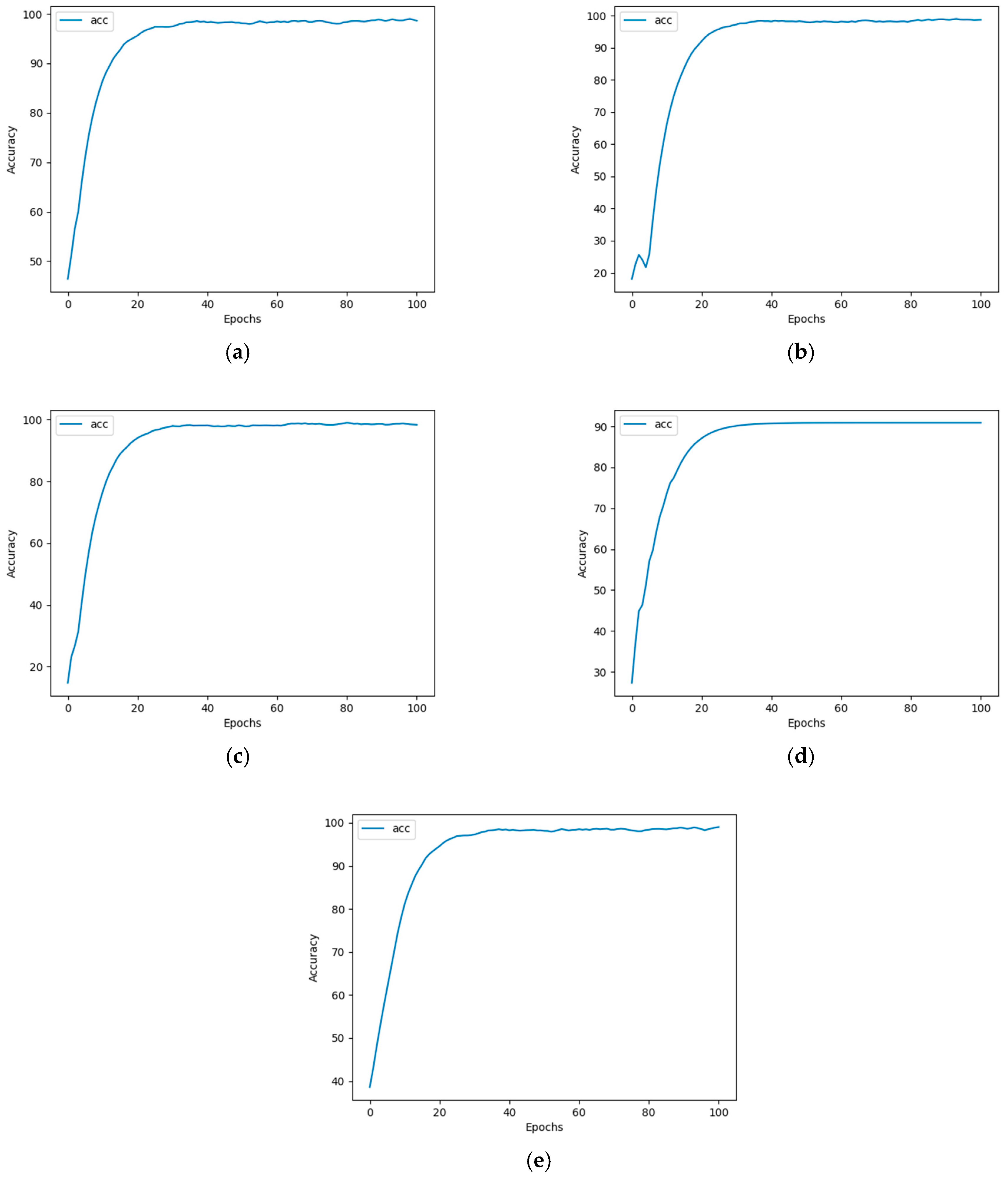
2.4.6. Neural Network Modeling
- (1)
- Convolutional Neural Networks (CNNs)
- (2)
- Heavy Metal Ion Water Quality Parameter Prediction Model
3. Design of the Multi-Parameter Water Quality Detection System
4. Case Study: Copper Ions in Water
4.1. Experimental Instruments and Materials
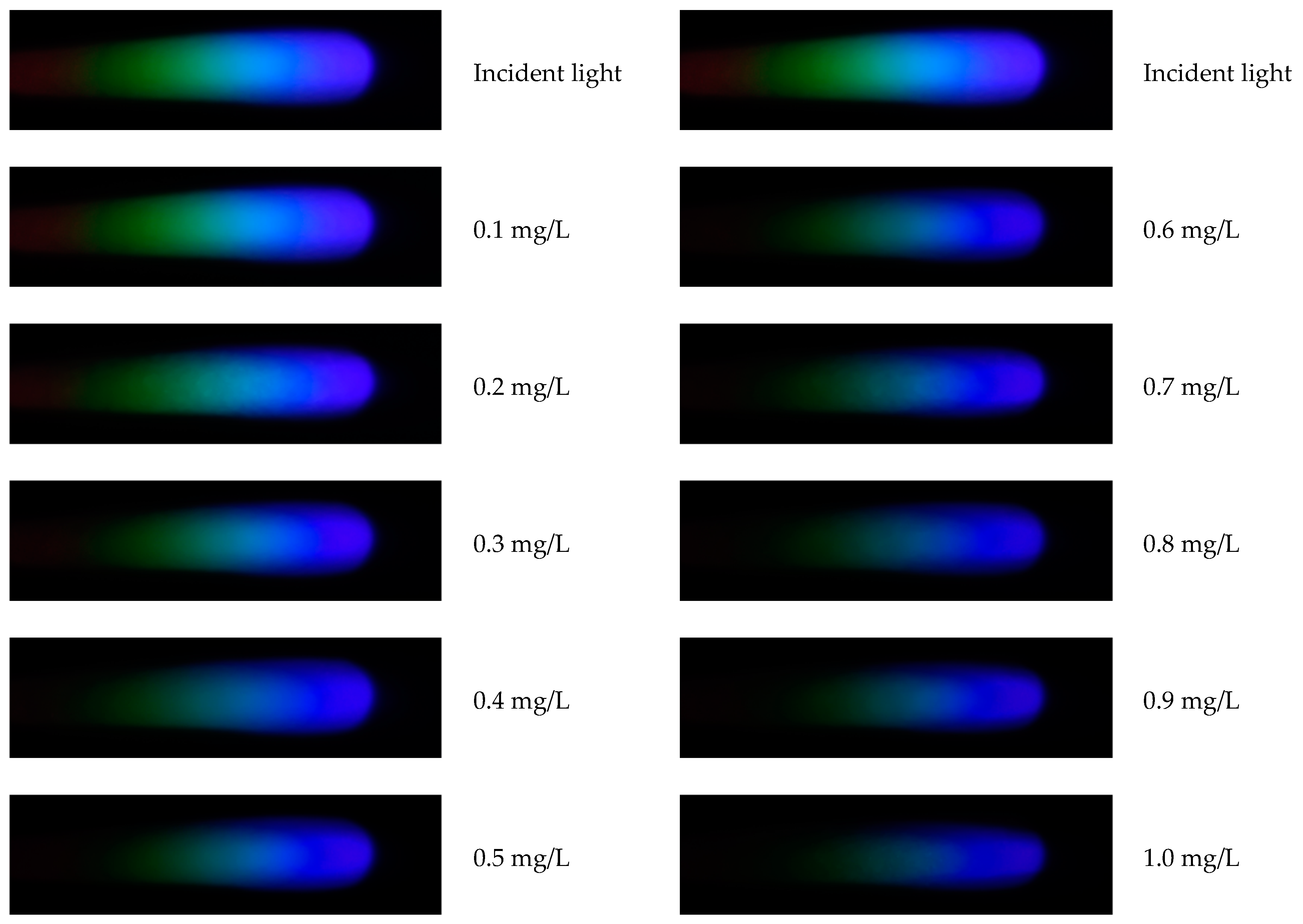
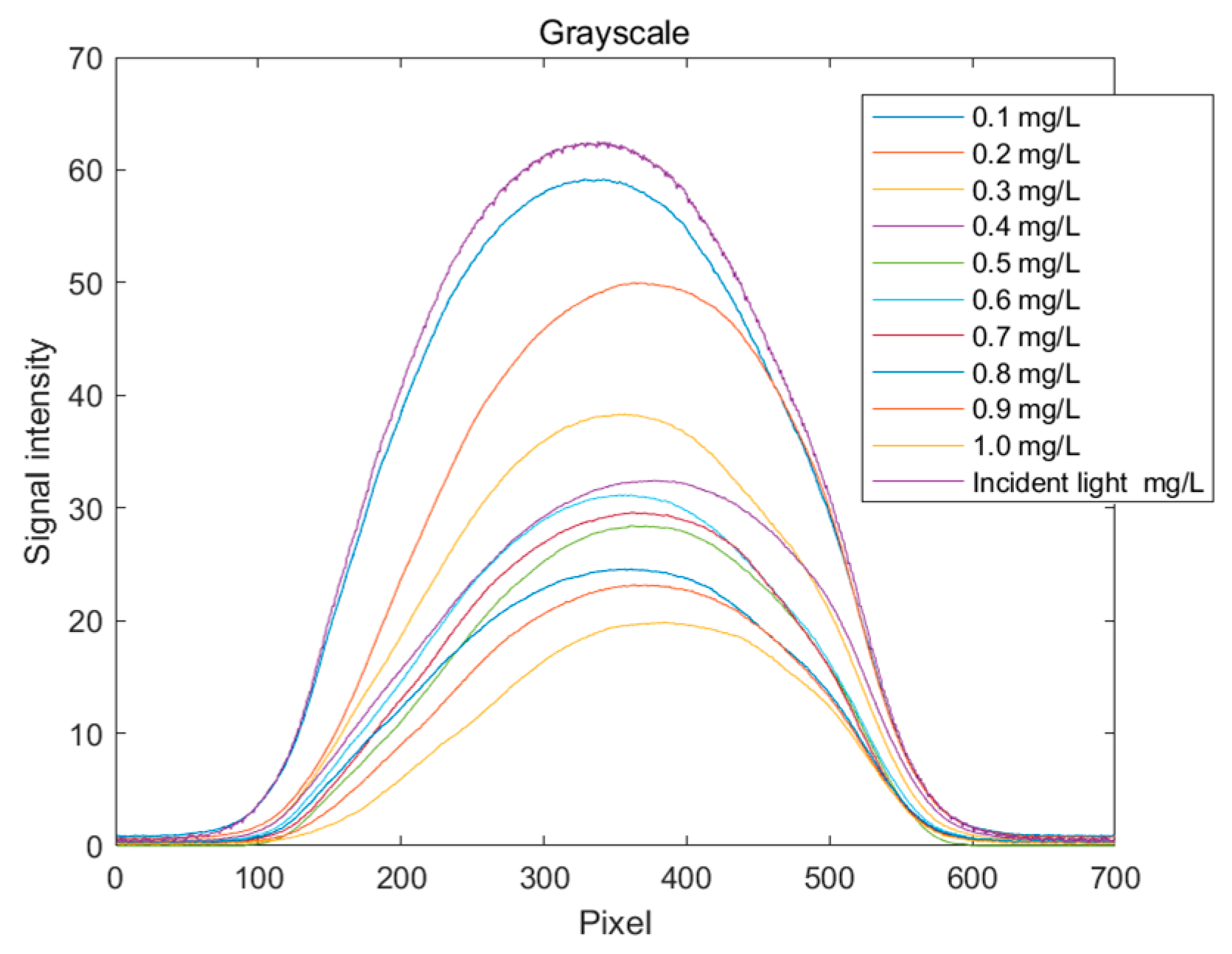
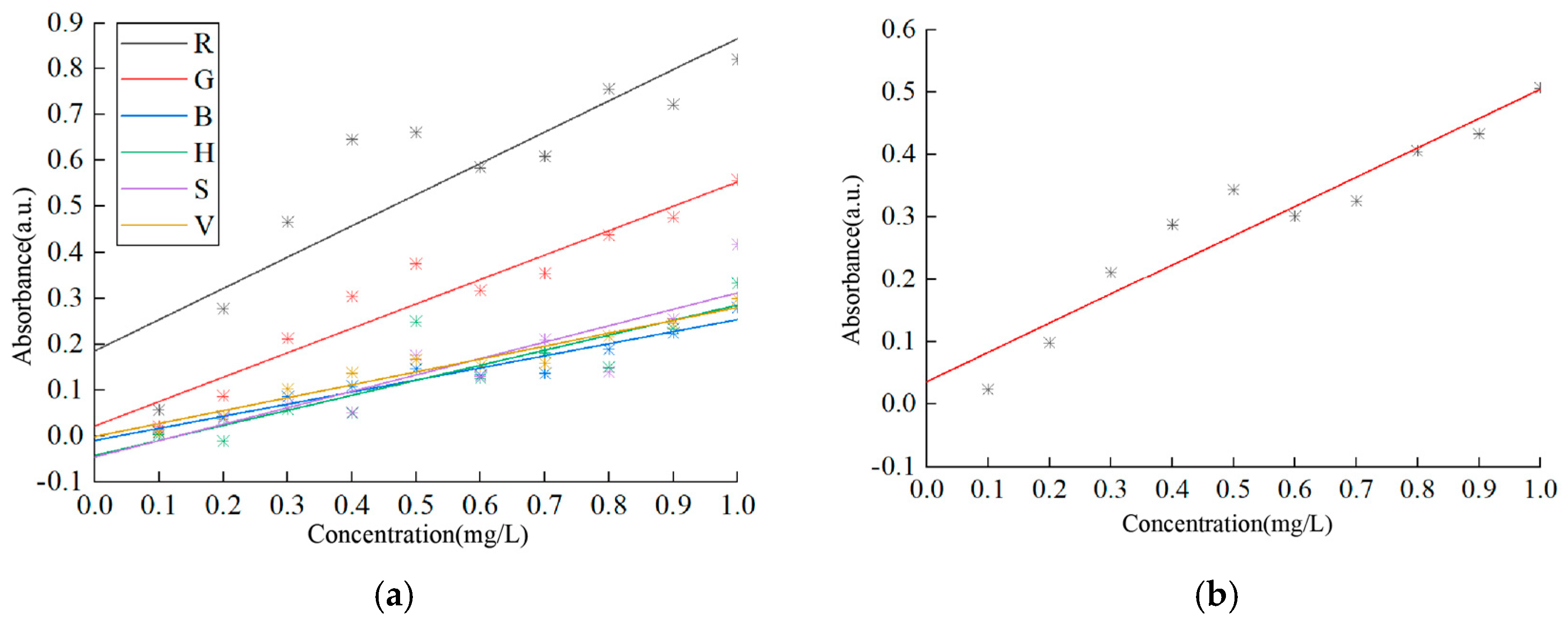
4.2. Spectral Image Analysis of Copper Solution
4.3. Effectiveness Analysis of the EEMD-SVD Spectral Denoising Method
4.3.1. Validation of the Rationality of the EEMD-SVD Spectral Denoising Method
- (1)
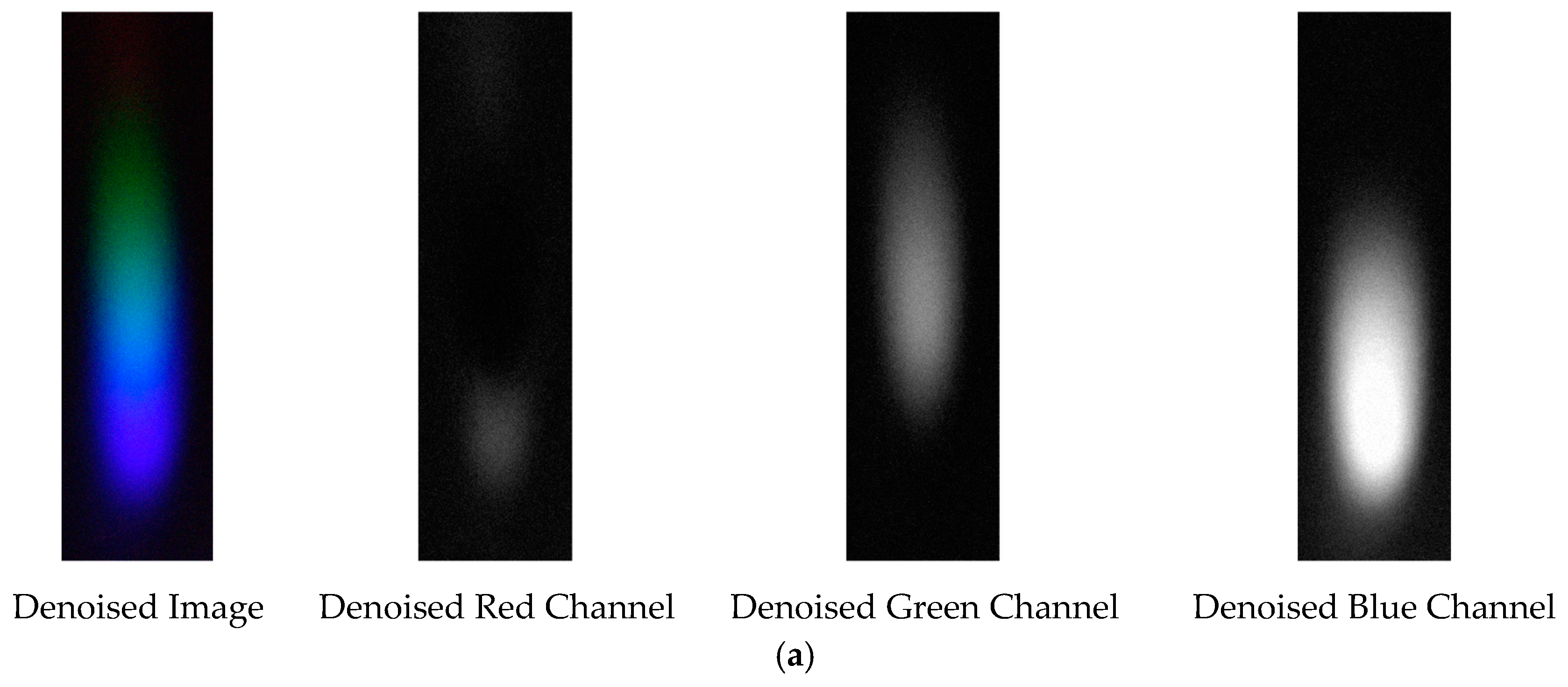
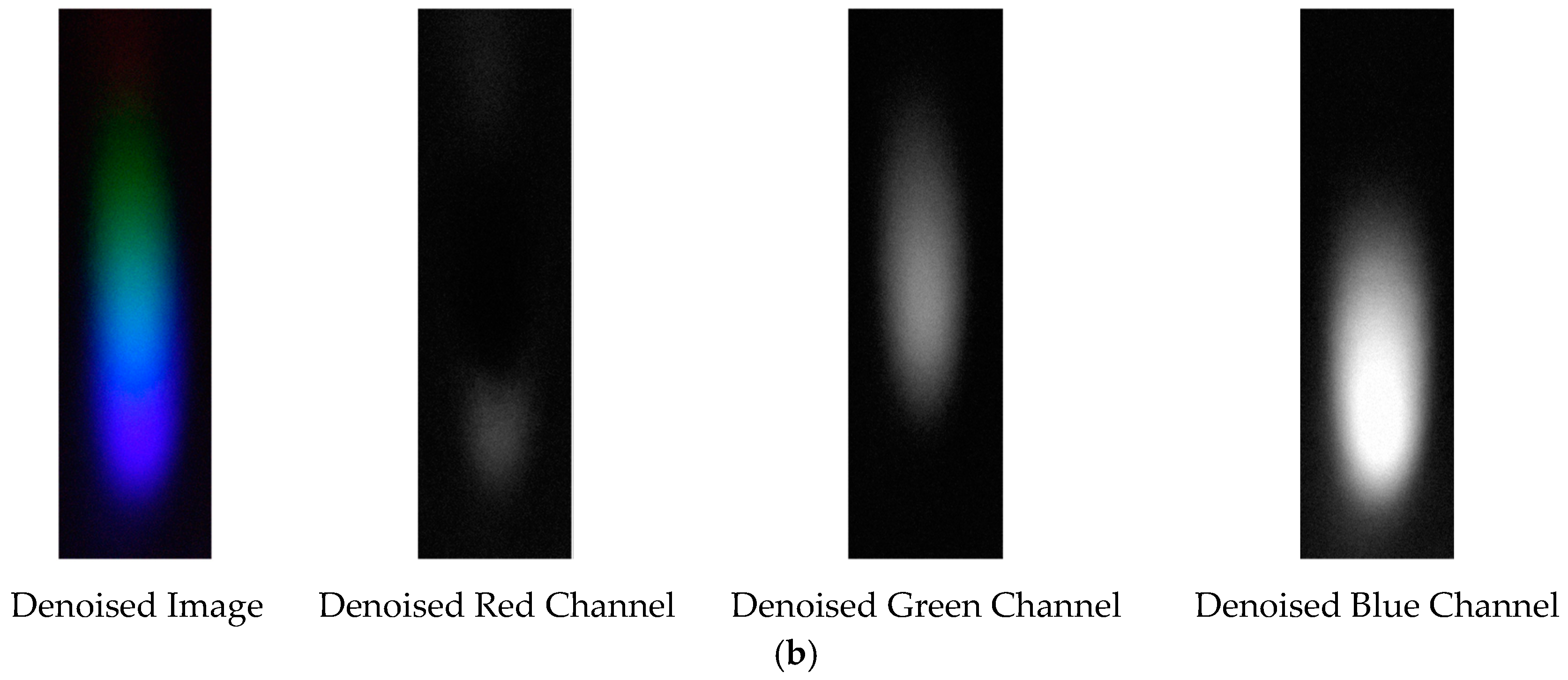
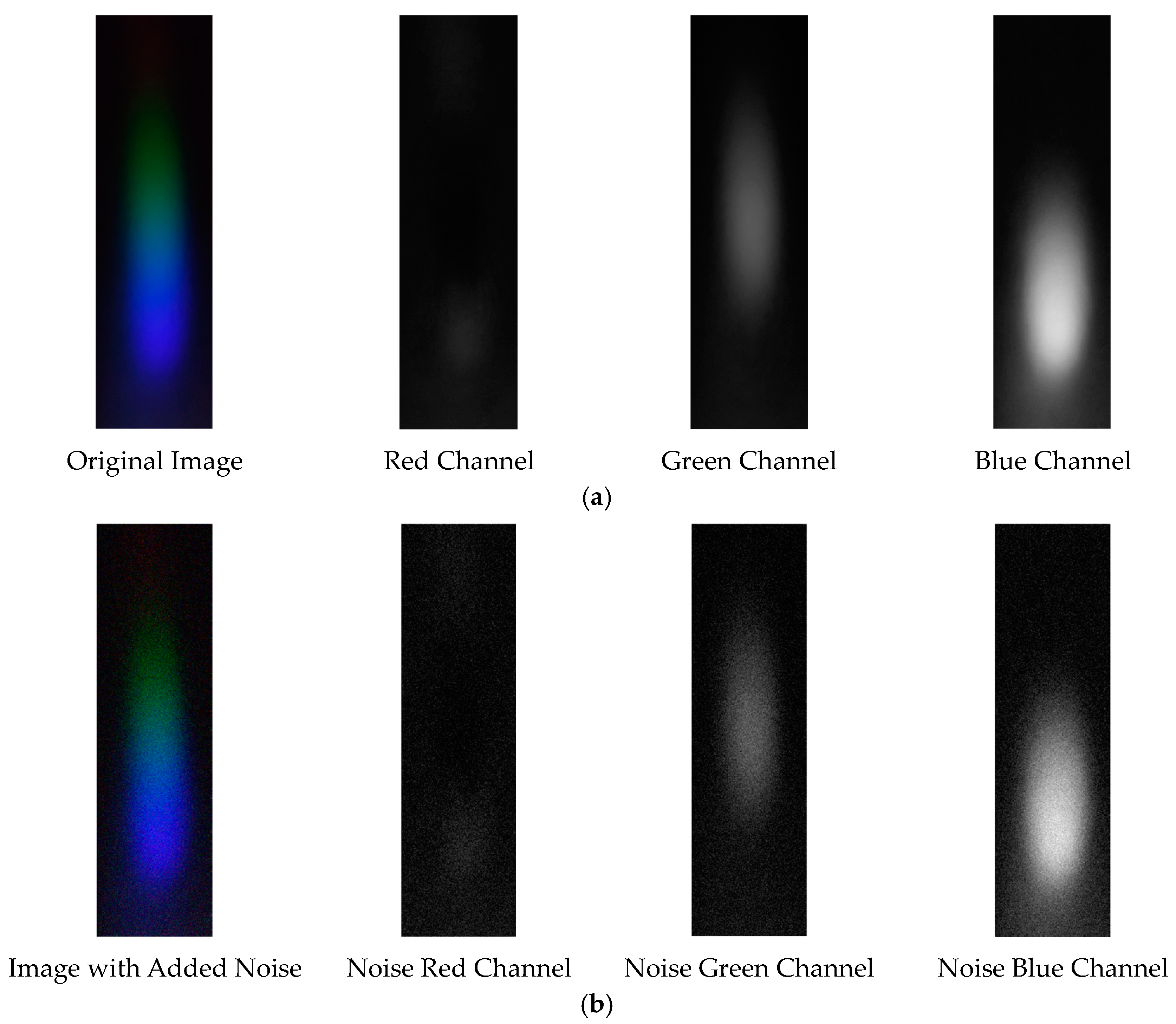
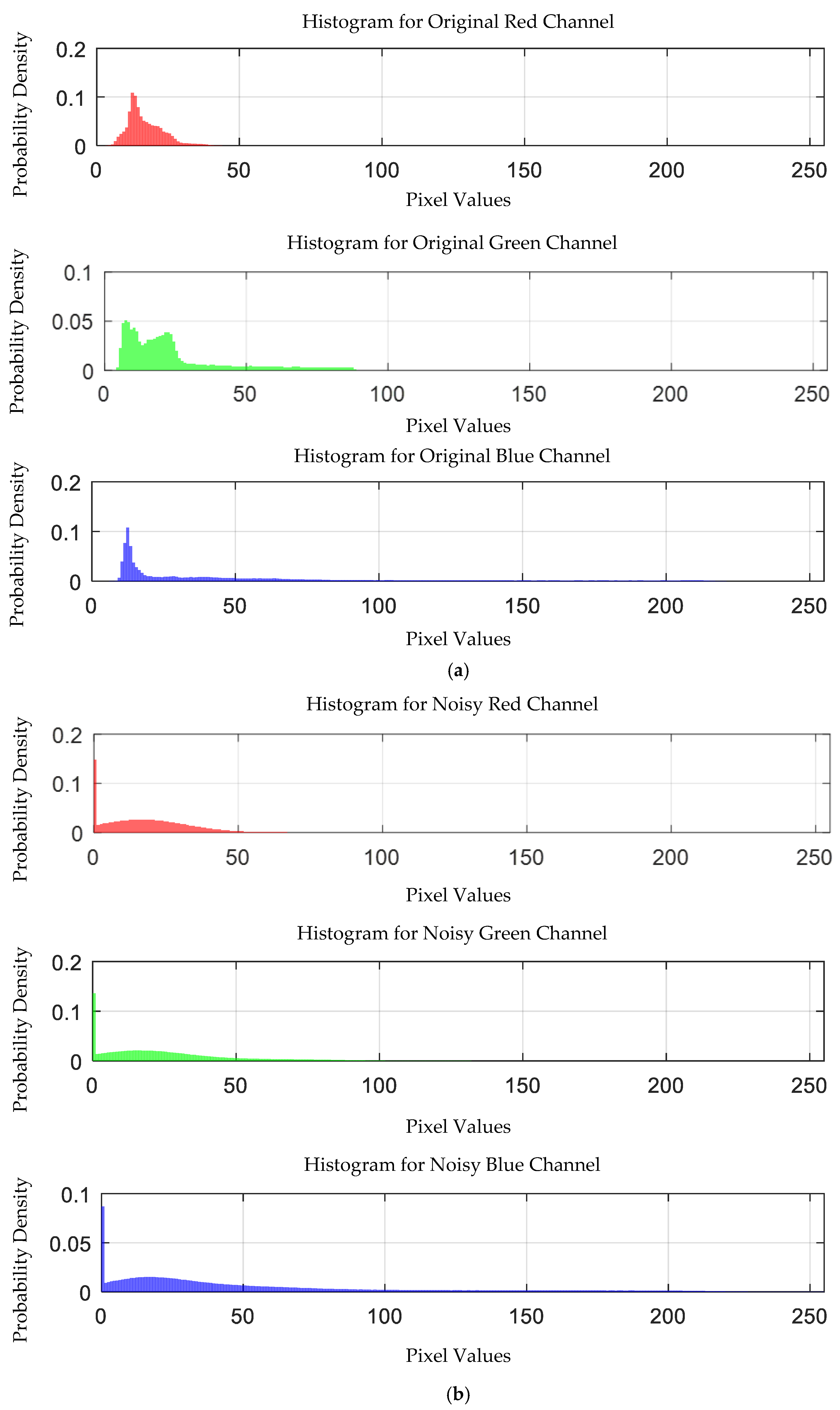
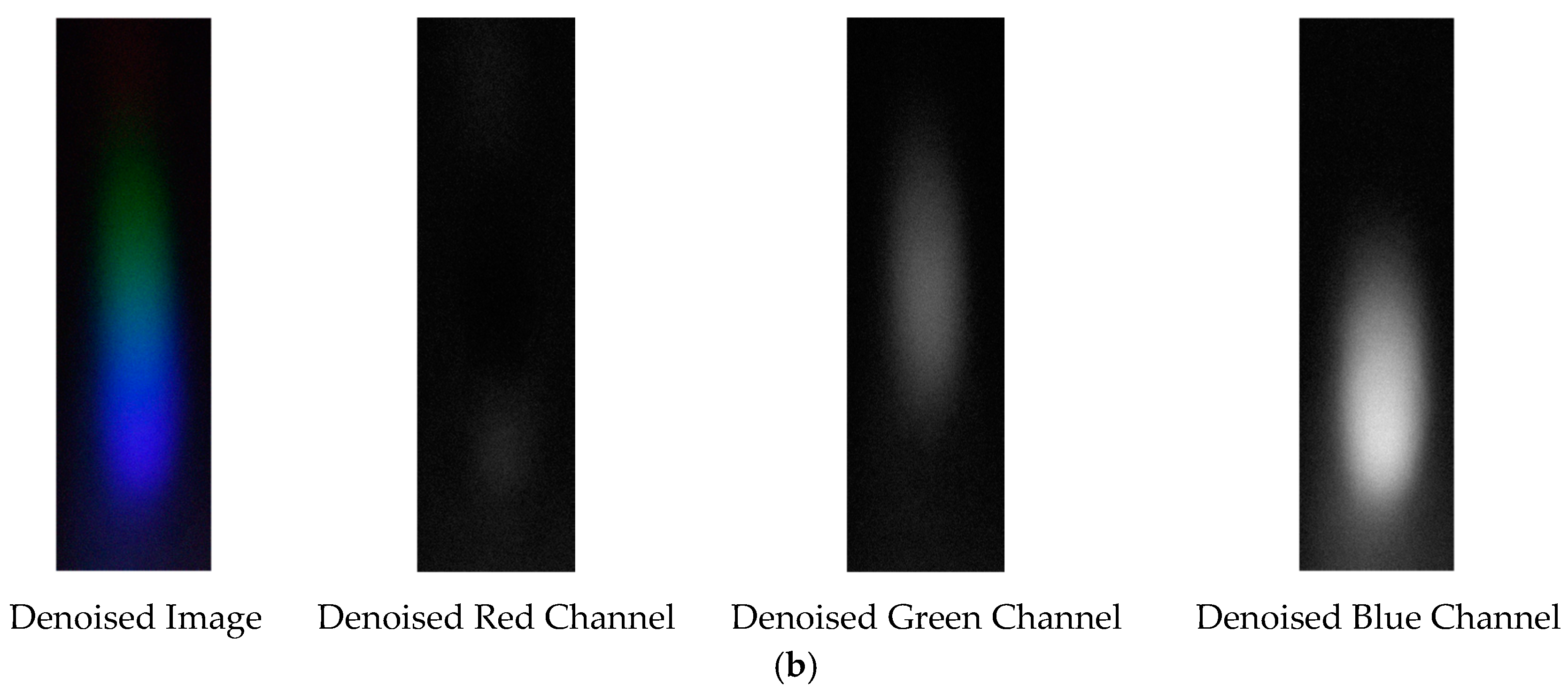
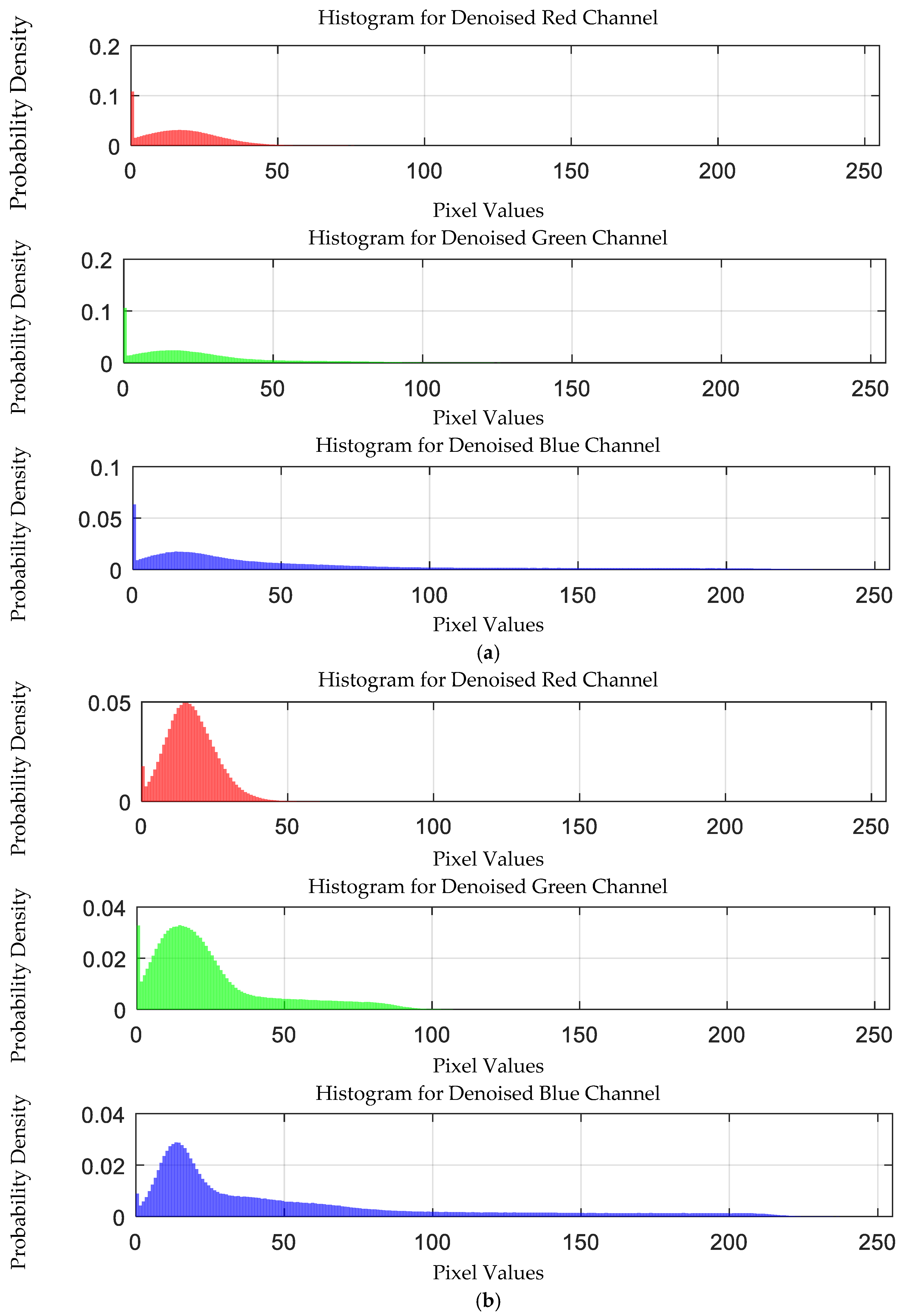
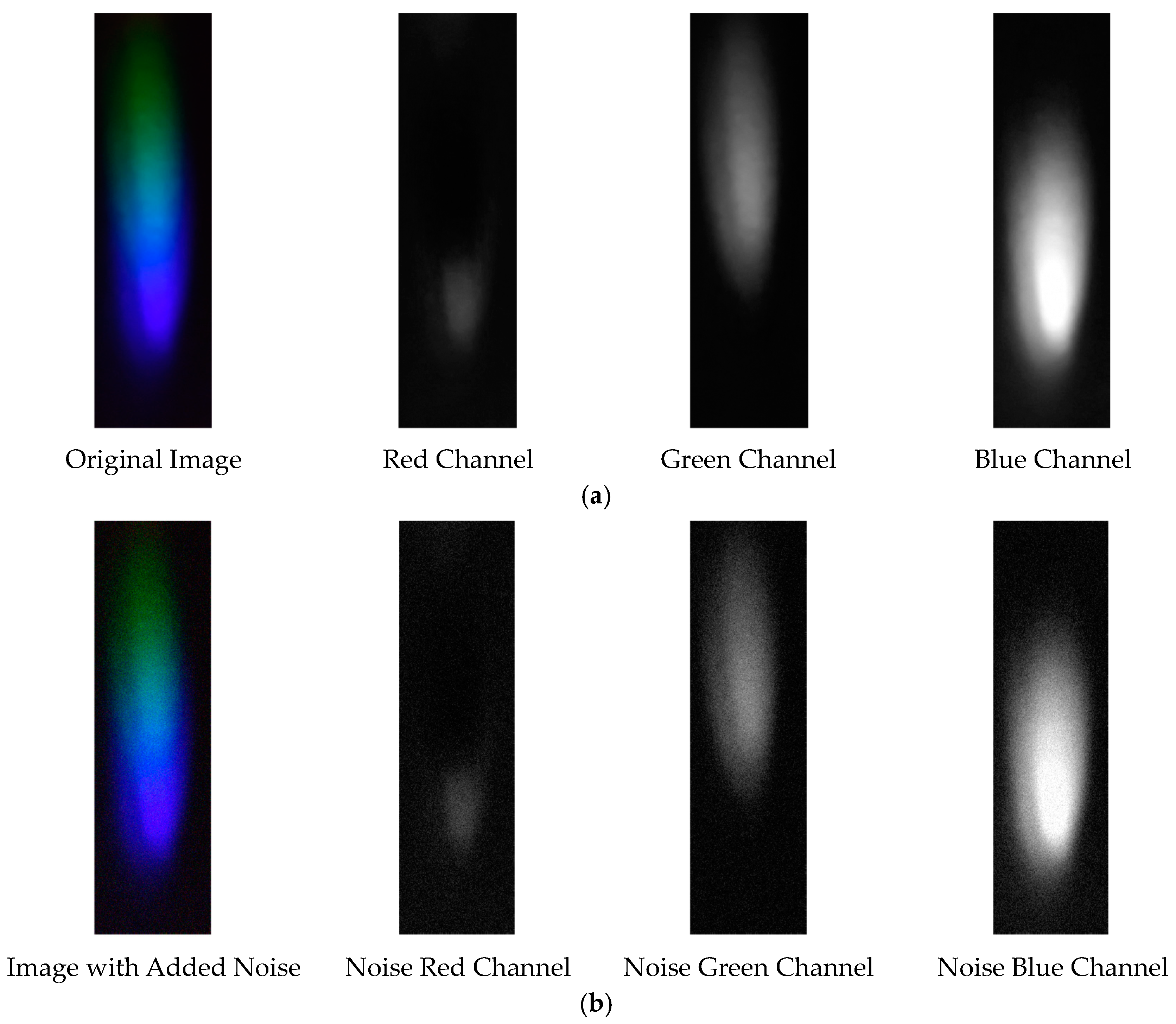
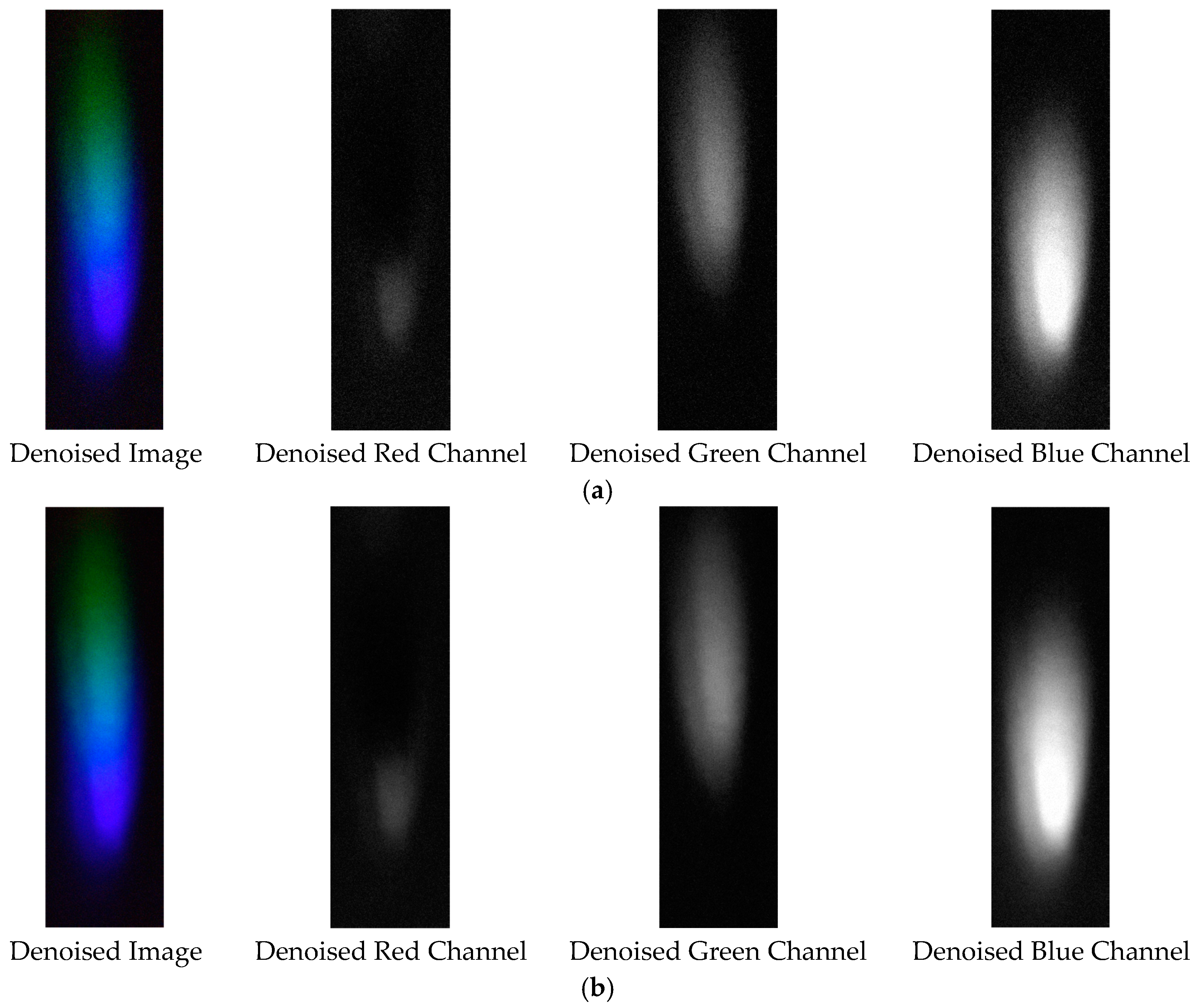
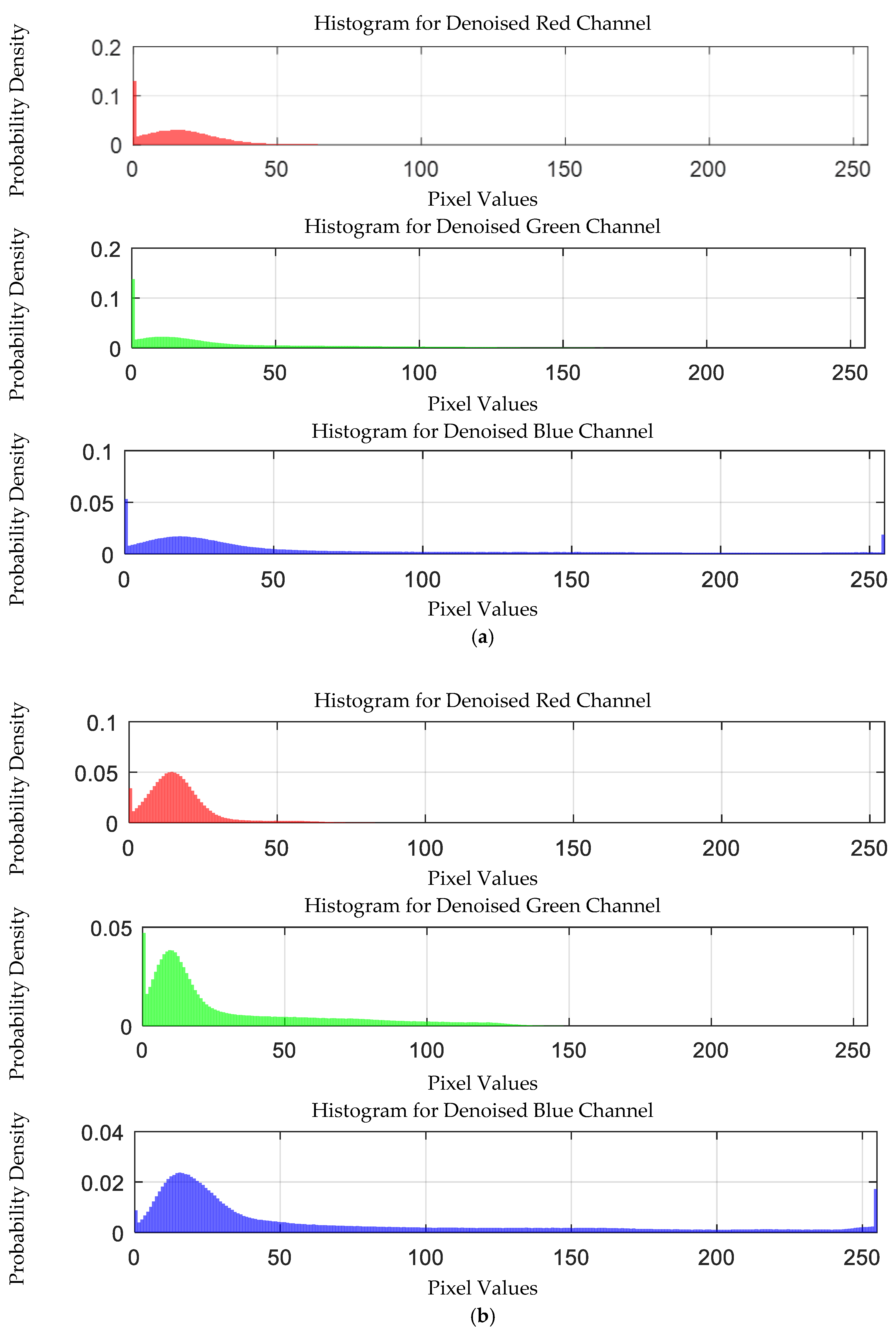
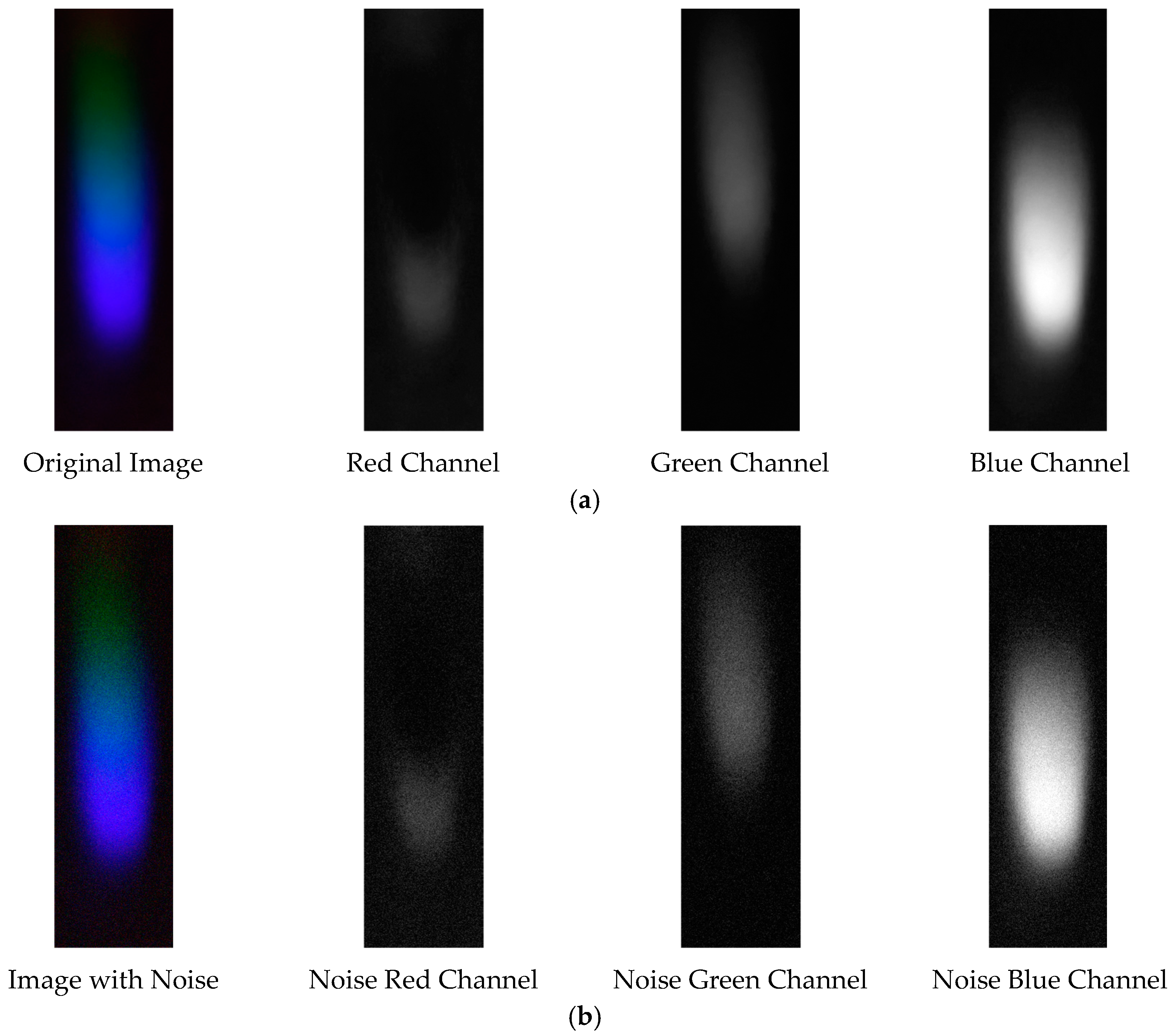
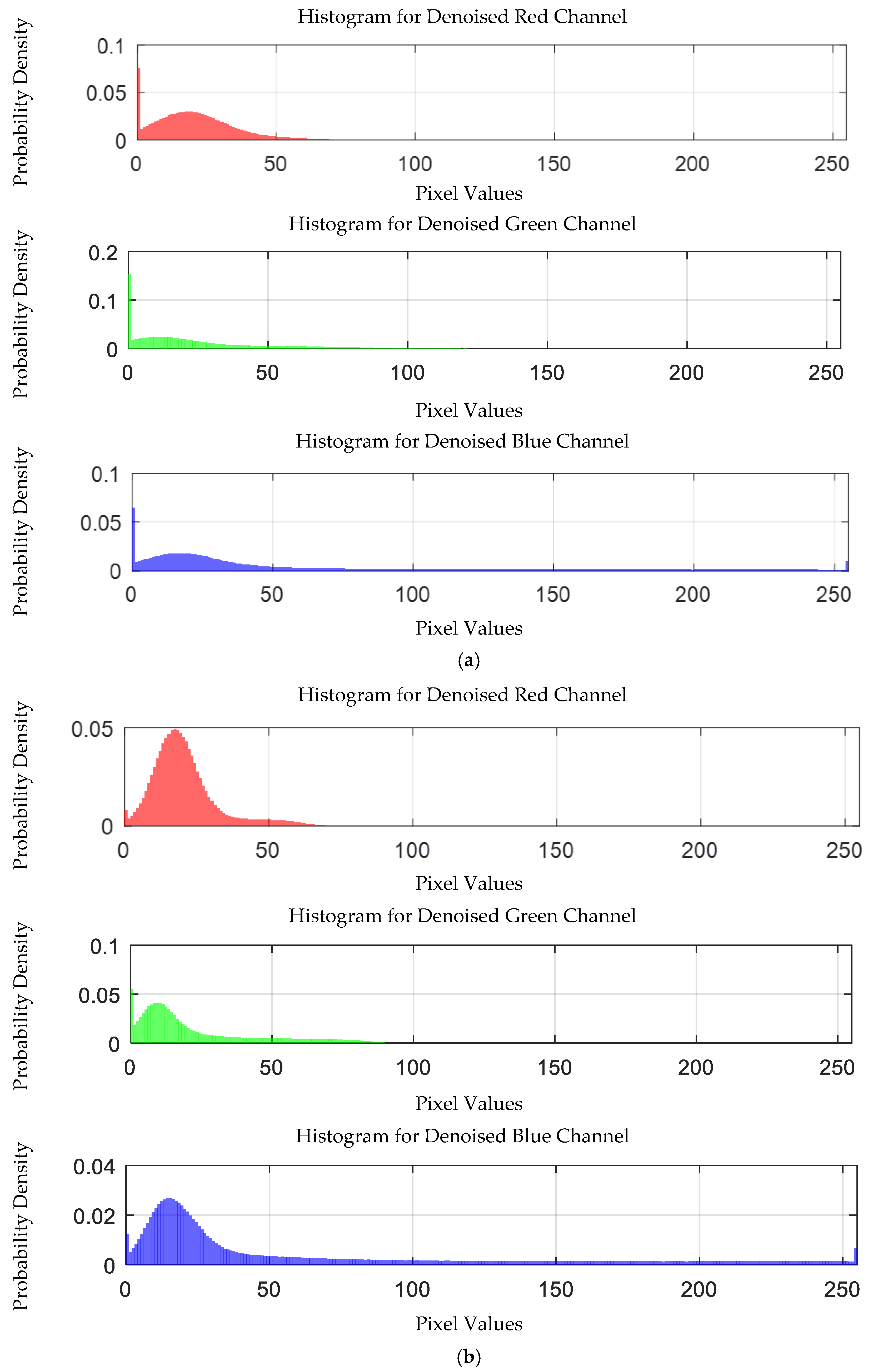
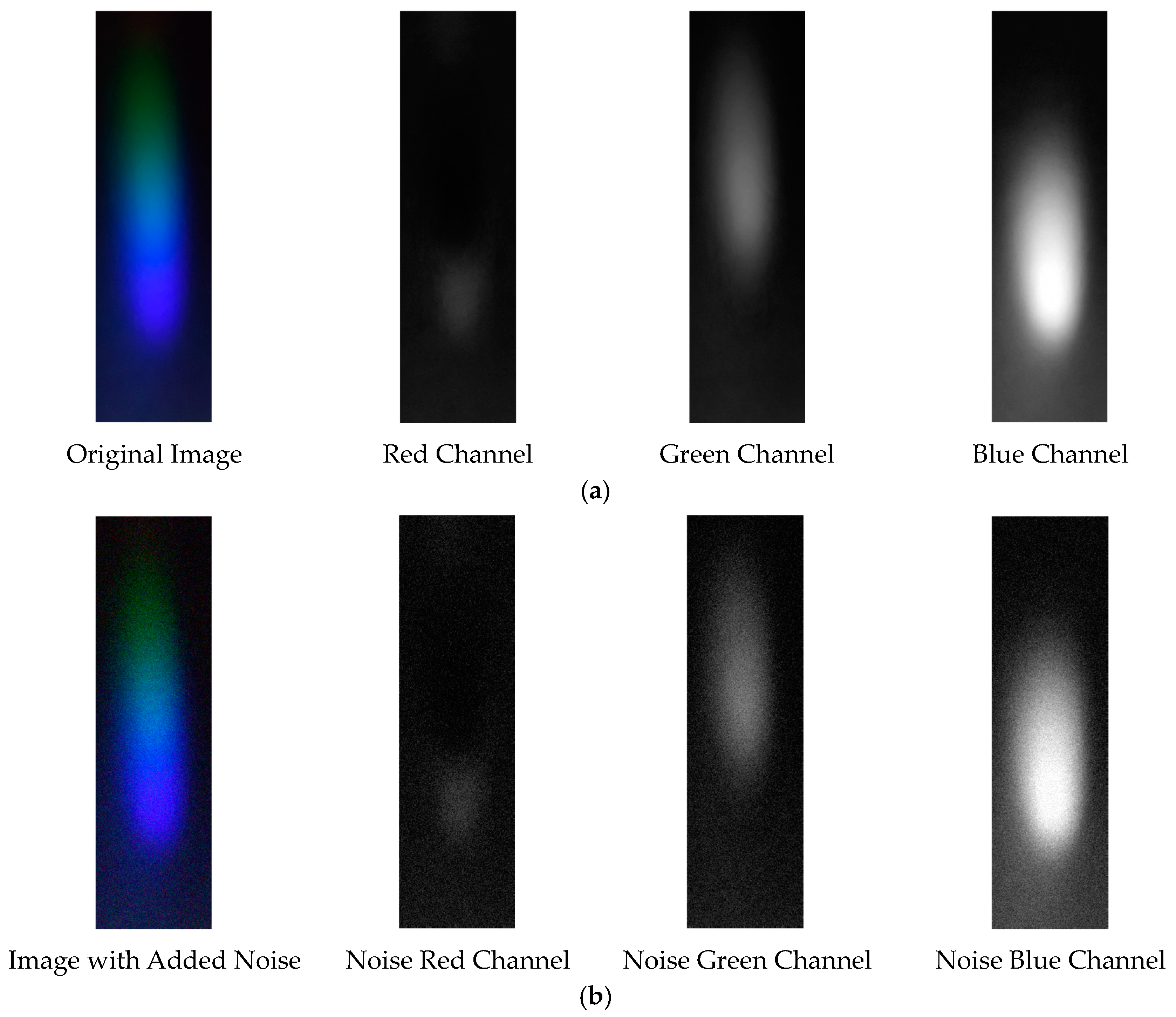
- Analysis of the Denoising Effect of Copper Ion Solution Spectra
- (2)
- Analysis of the Denoising Effect of Arsenic Ion Solution Spectra
- (3)
- Analysis of the Denoising Effect of Lead Ion Solution Spectra
- (4)
- Analysis of the Denoising Effect of Mercury Ion Solution Spectra
- (5)
- Analysis of the Denoising Effect of Chromium Ion Solution Spectra
4.3.2. Field Water Sampling and Detection Test Comparison Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Singh, N.; Poonia, T.; Siwal, S.S.; Srivastav, A.L.; Sharma, H.K.; Mittal, S.K. Challenges of water contamination in urban areas. In Current Directions in Water Scarcity Research; Elsevier: Amsterdam, The Netherlands, 2022; pp. 173–202. [Google Scholar]
- Jiang, Y.; Chen, Y.; Younos, T.; Huang, H.; He, J. Urban water resources quota management: The core strategy for water demand management in China. Ambio 2010, 39, 467–475. [Google Scholar] [CrossRef]
- Azimi, A.; Azari, A.; Rezakazemi, M.; Ansarpour, M. Removal of heavy metals from industrial wastewaters: A review. ChemBioEng Rev. 2017, 4, 37–59. [Google Scholar] [CrossRef]
- Cabral-Pinto, M.M.; Inácio, M.; Neves, O.; Almeida, A.A.; Pinto, E.; Oliveiros, B.; Ferreira da Silva, E.A. Human health risk assessment due to agricultural activities and crop consumption in the surroundings of an industrial area. Expo. Health 2020, 12, 629–640. [Google Scholar] [CrossRef]
- Cabral Pinto, M.M.; Marinho-Reis, P.; Almeida, A.; Pinto, E.; Neves, O.; Inácio, M.; Gerardo, B.; Freitas, S.; Simões, M.R.; Dinis, P.A.; et al. Links between cognitive status and trace element levels in hair for an environmentally exposed population: A case study in the surroundings of the estarreja industrial area. Int. J. Environ. Res. Public Health 2019, 16, 4560. [Google Scholar] [CrossRef] [PubMed]
- Kumar, A.; Jigyasu, D.K.; Subrahmanyam, G.; Mondal, R.; Shabnam, A.A.; Cabral-Pinto, M.M.S.; Malyan, S.K.; Chaturvedi, A.K.; Gupta, D.K.; Fagodiya, R.K.; et al. Nickel in terrestrial biota: Comprehensive review on contamination, toxicity, tolerance and its remediation approaches. Chemosphere 2021, 275, 129996. [Google Scholar]
- Wang, Z.; Li, B.; Li, L. Research on water quality detection technology based on multispectral remote sensing. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2019. [Google Scholar]
- Peng, H. Automatic Denoising and Unmixing in Hyperspectral Image Processing. Ph.D. Thesis, Rochester Institute of Technology, Rochester, NY, USA, 2014. [Google Scholar]
- Wang, Y.; Li, Y.; Lv, H.; Wu, C.; Jin, X.; Yin, B.; Zhang, H. Suitability of Environmental No. 1 Satellite Hyperspectral Remote Sensing Data for Monitoring Inland Water Quality: A Case Study of Chaohu Lake. J. Lake Sci. 2011, 23, 7. (In Chinese) [Google Scholar]
- Wu, D.C.; Wei, B.; Feng, P.; Tang, B.; Liu, J. Denoising Algorithm of UV-Vis Spectroscopy on Water Quality Detection Based on Two-Dimension Restructuring and Dynamic Pane. Guang Pu Xue Yu Guang Pu Fen Xi=Guang Pu 2016, 36, 1044–1050. [Google Scholar]
- Dron, J.P.; Bolaers, F.; Rasolofondraibe, L. Improvement of the sensitivity of the scalar indicators (crest factor, kurtosis) using a de-noising method by spectral subtraction: Application to the detection of defects in ball bearings. J. Sound Vib. 2004, 270, 61–73. [Google Scholar] [CrossRef]
- Karam, M.; Khazaal, H.F.; Aglan, H.; Cole, C. Noise Removal in Speech Processing Using Spectral Subtraction. DBLP 2014, 5, 32–41. [Google Scholar] [CrossRef]
- Merry, R. Wavelet Theory and Applications: A Literature Study; Technische Universiteit Eindhoven: Eindhoven, The Netherlands, 2005. [Google Scholar]
- Jiang, L.; Chen, X.; Ni, G.; Ge, S. Wavelet threshold denoising for hyperspectral data in spectral domain. In Proceedings of the International Conference on Earth Observation Data Processing and Analysis (ICEODPA), Wuhan, China, 28–30 December 2008; SPIE: Bellingham, WA, USA, 2008; Volume 7285, pp. 398–403. [Google Scholar]
- Li, C.P.; Han, J.Q.; Huang, Q.B.; Mu, N.; Zhu, D.Z.; Guo, C.T.; Cao, B.Q.; Zhang, L. An integrated on-line processing method for spectrometric data based on wavelet transform and Gaussian fitting. Spectrosc. Spectr. Anal. 2011, 31, 3050–3054. [Google Scholar]
- Hou, Z. Adaptive singular value decomposition in wavelet domain for image denoising. Pattern Recognit. 2003, 36, 1747–1763. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A Complete Ensemble Empirical Mode Decomposition with Adaptive Noise; IEEE: New York, NY, USA, 2011. [Google Scholar]
- Chen, W.; Wang, S.X.; Chuai, X.Y.; Zhang, Z. Random Noise Reduction Based on Ensemble Empirical Mode Decomposition and Wavelet Threshold Filtering. Adv. Mater. Res. 2012, 518, 3887–3890. [Google Scholar]
- Chen, W.; Wang, S.; Zhang, Z.; Chuai, X. Noise reduction based on wavelet threshold filtering and ensemble empirical mode decomposition. In SEG Technical Program Expanded Abstracts 2012; Society of Exploration Geophysicists: Tulsa, OK, USA, 1949. [Google Scholar]
- Agarwal, M.; Jain, R. Ensemble empirical mode decomposition: An adaptive method for noise reduction. IOSR J. Electron. Commun. Eng. 2013, 5, 60–65. [Google Scholar] [CrossRef]
- Huang, N.E. An adaptive data analysis method for nonlinear and nonstationary time series: The empirical mode decomposition and Hilbert spectral analysis. In Wavelet Analysis and Applications. Applied and Numerical Harmonic Analysis; Birkhäuser: Basel, Switzerland, 2007; pp. 363–376. [Google Scholar]
- Khaldi, K.; Alouane, M.T.H.; Boudraa, A.O. A new EMD denoising approach dedicated to voiced speech signals. In Proceedings of the 2008 2nd International Conference on Signals, Circuits and Systems, Tunisia, North Africa, 7–9 November 2008; IEEE: New York, NY, USA, 2008; pp. 1–5. [Google Scholar]
- Yang, G.; Liu, Y.; Wang, Y.; Zhu, Z. EMD interval thresholding denoising based on similarity measure to select relevant modes. Signal Process. 2015, 109, 95–109. [Google Scholar] [CrossRef]
- Hamid, M.E.; Das, S.; Hirose, K.; Molla, M.K.I. Speech enhancement using EMD based adaptive soft-thresholding (EMD-ADT). Int. J. Signal Process. Image Process. Pattern Recognit. 2012, 5, 1–16. [Google Scholar]
- Li, J.J.; An, D.; Wang, J. Speech Denoising Method Based on the EEMD and ICA Approaches. J. Northeast. Univ. (Nat. Sci.) 2011, 32, 1554–1557. [Google Scholar]
- Yeh, J.-R.; Shieh, J.-S.; Huang, N.E. Complementary ensemble empirical mode decomposition: A novel noise enhanced data analysis method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Mariyappa, N.; Sengottuvel, S.; Parasakthi, C.; Gireesan, K.; Janawadkar, M.P.; Radhakrishnan, T.S.; Sundar, C.S. Baseline drift removal and denoising of MCG data using EEMD: Role of noise amplitude and the thresholding effect. Med. Eng. Phys. 2014, 36, 1266–1276. [Google Scholar]
- Han, J.; van der Baan, M. Microseismic and seismic denoising via ensemble empirical mode decomposition and adaptive thresholding. Geophysics 2015, 80, KS69–KS80. [Google Scholar]
- Tian, Z.; Li, S.; Wang, Y.; Gao, X. Short-Term Wind Speed Combined Prediction for Wind Farms Based on Wavelet Transform. Diangong Jishu Xuebao/Trans. China Electrotech. Soc. 2017, 30, 112–120. [Google Scholar]
- Wu, M.; Zhang, R.H.; Hu, J.; Zhi, H. Synergistic Interdecadal Evolution of Precipitation over Eastern China and the Pacific Decadal Oscillation during 1951–2015. Adv. Atmos. Sci. 2024, 41, 53–72. [Google Scholar] [CrossRef]
- Yu, K.; Lin, T.R.; Tan, J.W. A bearing fault diagnosis technique based on singular values of EEMD spatial condition matrix and Gath-Geva clustering. Appl. Acoust. 2017, 121, 33–45. [Google Scholar] [CrossRef]
- Gai, J.; Hu, Y. Research on Fault Diagnosis Based on Singular Value Decomposition and Fuzzy Neural Network. Shock. Vib. 2018, 2018, 1–7. [Google Scholar] [CrossRef]
- Johnston, C.T.; Bailey, D.G.; Lyons, P.; Gribbon, K.T. Formalisation of a visual environment for real time image processing in hardware (VERTIPH). In Proceedings of the Image and Vision Computing New Zealand (IVCNZ’04), Akaroa, New Zealand, 21–23 November 2004; pp. 291–296. [Google Scholar]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type/Step Length | Nuclear Shape | Number of Parameters |
|---|---|---|
| convolution/1 | 3 × 3 × 3 × 64 | 576 |
| convolution/1 | 64 × 3 × 3 × 3 × 64 | 36,864 |
| max pooling/1 | 2 × 2 | |
| convolution/1 | 64 × 3 × 3 × 128 | 73,728 |
| convolution/1 | 128 × 3 × 3 × 128 | 147,456 |
| max pooling/2 | 2 × 2 | |
| convolution/1 | 128 × 3 × 3 × 256 | 294,912 |
| convolution/1 | 256 × 3 × 3 × 256 | 589,824 |
| convolution/1 | 256 × 3 × 3 × 256 | 589,824 |
| max pooling/2 | 2 × 2 | |
| convolution/1 | 256 × 3 × 3 × 512 | 1,179,648 |
| convolution/1 | 512 × 3 × 3 × 512 | 2,359,296 |
| convolution/1 | 512 × 3 × 3 × 512 | 2,359,296 |
| max pooling/2 | 2 × 2 | |
| convolution/1 | 512 × 3 × 3 × 512 | 2,359,296 |
| convolution/1 | 512 × 3 × 3 × 512 | 2,359,296 |
| convolution/1 | 512 × 3 × 3 × 512 | 2,359,296 |
| max pooling/2 | 2 × 2 | |
| fully connected layer | 25088 × 4096 | 102,760,448 |
| fully connected layer | 4096 × 4096 | 16,777,216 |
| fully connected layer | 4096 × 1 | 4096 |
| Total number of parameters | 134,251,072 | |
| Metal Solutions | Cr | Hg | Pb | As | Cu |
|---|---|---|---|---|---|
| Accuracy (%) | 90.707 | 96.676 | 96.113 | 90.909 | 99.394 |
| Name | Model | Specification |
|---|---|---|
| Diaphragm | SK12 | Φ1.0–12 mm |
| Plano-convex lens | General analytical optical quartz plain convex lens | Φ30 mm, f39.2 mm |
| Diffraction grating (Holographic) | GS012 Round Ball Technology | 1200-line/mm, 20 mm × 20 mm × 2 mm |
| Lens carrier | Hengyang Optical MLNR-1.2 | Φ30 mm |
| Optical bench | Kopu 25009 | 55 mm × 42 mm × 55 mm |
| Indicator | R | G | B | H | S | V | Grayscale Value |
|---|---|---|---|---|---|---|---|
| Intercept | 0.18496 | 0.02133 | −0.01037 | −0.0431 | −0.04644 | −0.00164 | 0.03605 |
| Slope | 0.68115 | 0.53183 | 0.26334 | 0.32752 | 0.35757 | 0.28092 | 0.46806 |
| Correlation coefficient | 0.77405 | 0.91826 | 0.93965 | 0.76279 | 0.78905 | 0.93833 | 0.94095 |
| Test Object | Sample Number | Spectral Method (mg/L) | National Standard Method (mg/L) | Relative Error (%) | Repeatability (%) | Spectral Method Mean (mg/L) | National Standard Method Mean (mg/L) |
|---|---|---|---|---|---|---|---|
| 1 | 1 | 0.082 | 0.084 | −2.38% | 1.84% | 0.08 | 0.08 |
| 2 | 0.079 | 0.082 | −3.66% | ||||
| 3 | 0.079 | 0.082 | −3.66% | ||||
| 4 | 0.08 | 0.083 | −3.61% | ||||
| 5 | 0.081 | 0.083 | −2.41% | ||||
| 6 | 0.078 | 0.08 | −2.50% | ||||
| 2 | 1 | 0.21 | 0.22 | −4.55% | 4.06% | 0.22 | 0.23 |
| 2 | 0.22 | 0.24 | −8.33% | ||||
| 3 | 0.22 | 0.23 | −4.35% | ||||
| 4 | 0.23 | 0.24 | −4.17% | ||||
| 5 | 0.21 | 0.23 | −8.70% | ||||
| 6 | 0.23 | 0.23 | 0.00% | ||||
| 3 | 1 | 0.42 | 0.41 | 2.44% | 2.28% | 0.43 | 0.42 |
| 2 | 0.44 | 0.43 | 2.33% | ||||
| 3 | 0.42 | 0.41 | 2.44% | ||||
| 4 | 0.44 | 0.43 | 2.33% | ||||
| 5 | 0.44 | 0.41 | 7.32% | ||||
| 6 | 0.43 | 0.41 | 4.88% | ||||
| 4 | 1 | 0.55 | 0.52 | 5.77% | 1.50% | 0.54 | 0.53 |
| 2 | 0.55 | 0.53 | 3.77% | ||||
| 3 | 0.54 | 0.52 | 3.85% | ||||
| 4 | 0.54 | 0.53 | 1.89% | ||||
| 5 | 0.55 | 0.52 | 5.77% | ||||
| 6 | 0.53 | 0.53 | 0.00% | ||||
| 5 | 1 | 0.74 | 0.75 | −1.33% | 1.03% | 0.73 | 0.75 |
| 2 | 0.72 | 0.74 | −2.70% | ||||
| 3 | 0.73 | 0.73 | 0.00% | ||||
| 4 | 0.73 | 0.76 | −3.95% | ||||
| 5 | 0.73 | 0.75 | −2.67% | ||||
| 6 | 0.72 | 0.75 | −4.00% | ||||
| 6 | 1 | 0.93 | 0.93 | 0.00% | 1.46% | 0.95 | 0.92 |
| 2 | 0.93 | 0.93 | 0.00% | ||||
| 3 | 0.94 | 0.91 | 3.30% | ||||
| 4 | 0.95 | 0.92 | 3.26% | ||||
| 5 | 0.96 | 0.93 | 3.23% | ||||
| 6 | 0.96 | 0.92 | 4.35% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, B.; Yang, S.; Cheng, X. A Heavy Metal Ion Water Quality Detection Model Based on Spectral Analysis: New Methods for Enhancing Detection Speed and Visible Spectral Denoising. Sensors 2025, 25, 2318. https://doi.org/10.3390/s25072318
Sun B, Yang S, Cheng X. A Heavy Metal Ion Water Quality Detection Model Based on Spectral Analysis: New Methods for Enhancing Detection Speed and Visible Spectral Denoising. Sensors. 2025; 25(7):2318. https://doi.org/10.3390/s25072318
Chicago/Turabian StyleSun, Bingyang, Shunsheng Yang, and Xu Cheng. 2025. "A Heavy Metal Ion Water Quality Detection Model Based on Spectral Analysis: New Methods for Enhancing Detection Speed and Visible Spectral Denoising" Sensors 25, no. 7: 2318. https://doi.org/10.3390/s25072318
APA StyleSun, B., Yang, S., & Cheng, X. (2025). A Heavy Metal Ion Water Quality Detection Model Based on Spectral Analysis: New Methods for Enhancing Detection Speed and Visible Spectral Denoising. Sensors, 25(7), 2318. https://doi.org/10.3390/s25072318