
Research on the Development of an Inland Lake Bathymetry Estimation Model Based on Multispectral Data


Abstract
1. Introduction
2. Data and Preprocessing
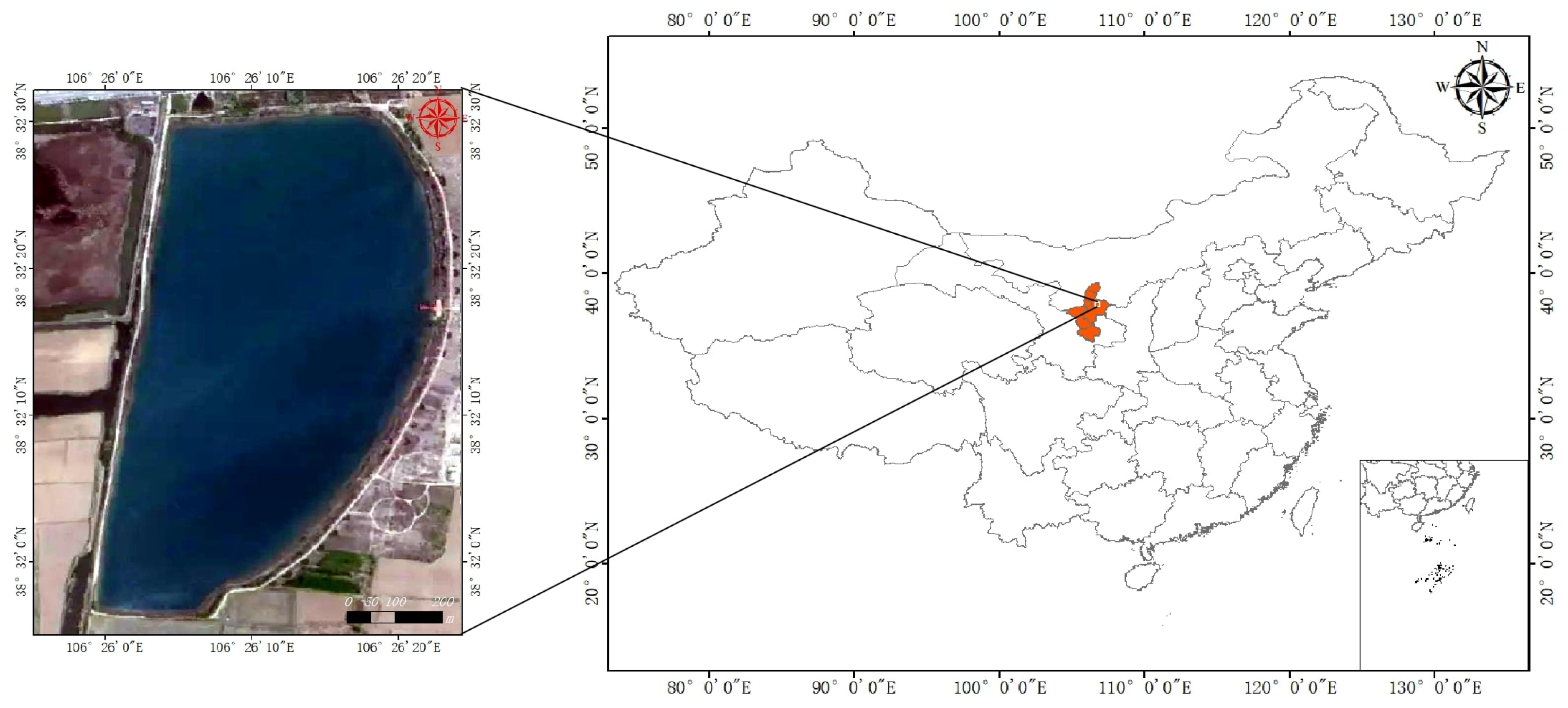
2.1. Study Area
2.2. Bathymetric Data
2.3. Satellite Imagery Data
3. Bathymetric Estimation Modeling
3.1. Bathymetric Estimation Factor Selection
3.2. Methodology
3.2.1. Multi-Band Logarithmic Ratio Model
3.2.2. Machine Learning Model
3.3. Precision Evaluation
4. Results
4.1. Model Performance Evaluation
4.2. Model Optimization Analysis
4.3. Analysis of Bathymetric Estimation Results
5. Discussion
5.1. Effect of Water Depth on Model Accuracy
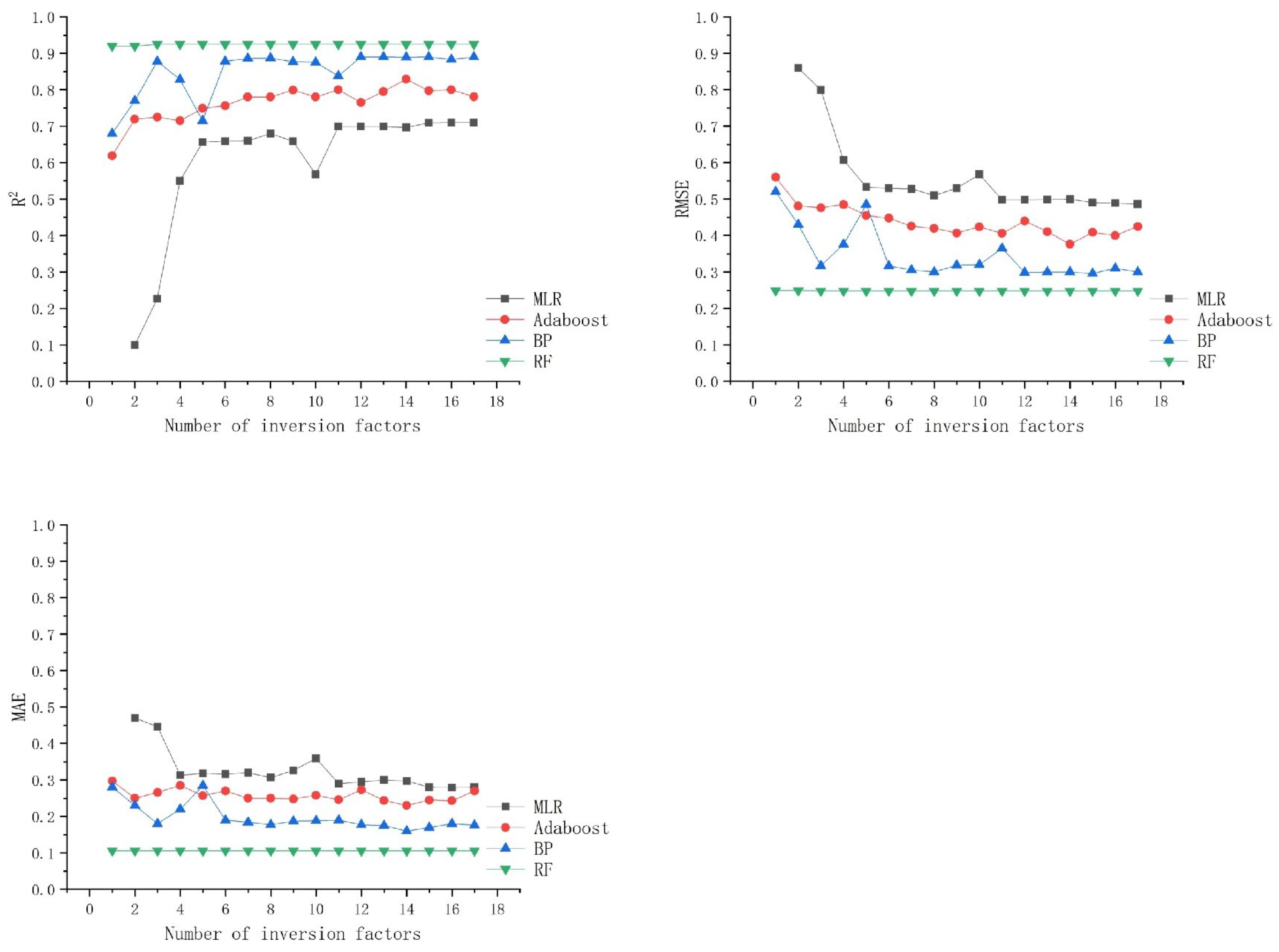
5.2. Effect of the Number of Model Factors on Model Accuracy
6. Conclusions
- (1)
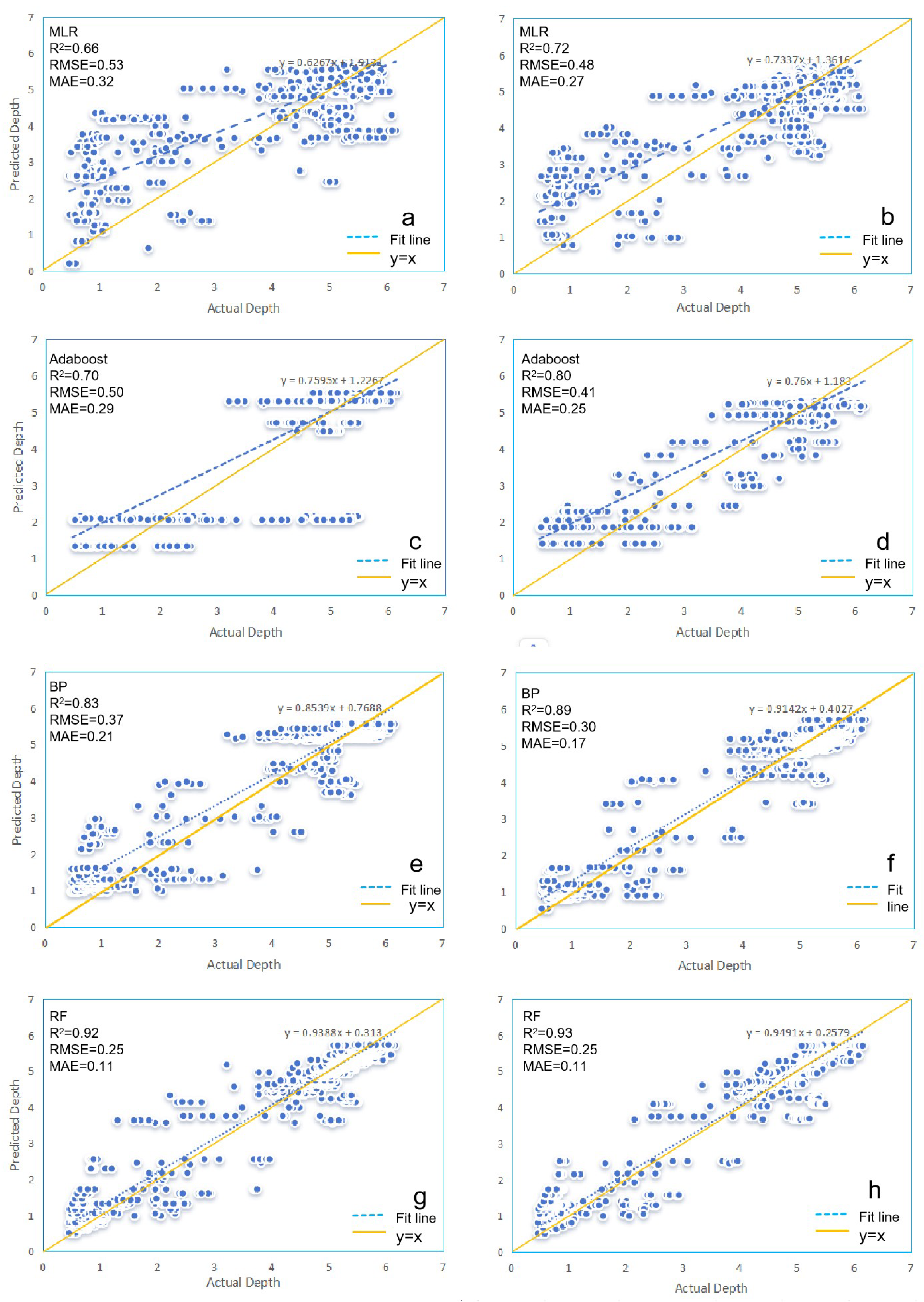
- Different remote sensing reflectance extraction methods can lead to a decrease in the accuracy of water-depth inversion. The machine learning models based on Rasterio, including RF, BP, and AdaBoost algorithms, and the MLR model, show better accuracy (R2 = 0.92, 0.83, 0.70, and 0.66; MAE = 0.11 m, 0.21 m, 0.29 m, and 0.32 m; RMSE = 0.25 m, 0.37 m, 0.50 m, and 0.53 m) compared to the same models based on the GDAL environment, which demonstrate lower accuracy (R2 = 0.88, 0.72, 0.61, and 0.59; MAE = 0.12 m, 0.24 m, 0.29 m, and 0.32 m; RMSE = 0.32 m, 0.48 m, 0.57 m, and 0.58 m).
- (2)
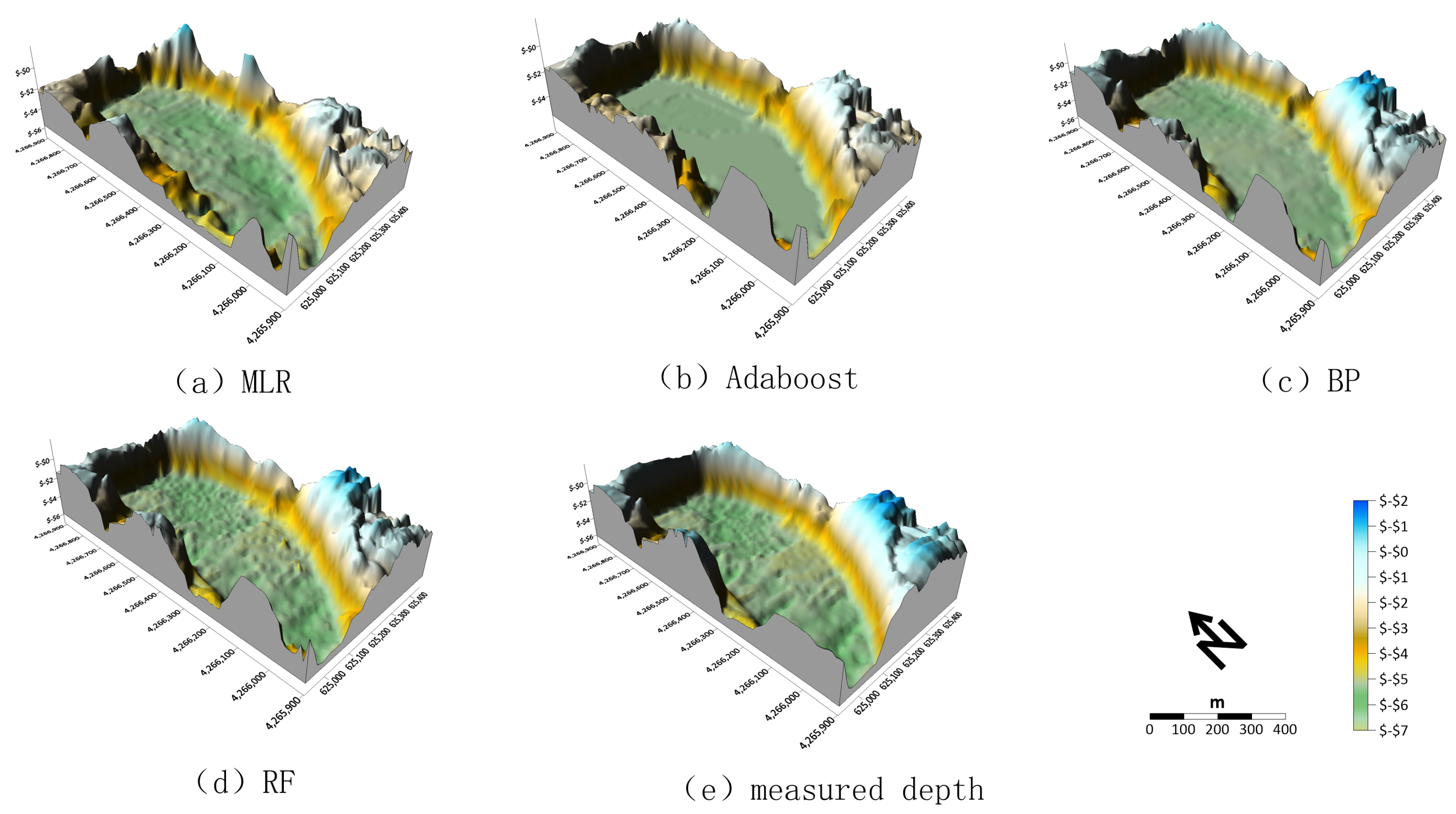
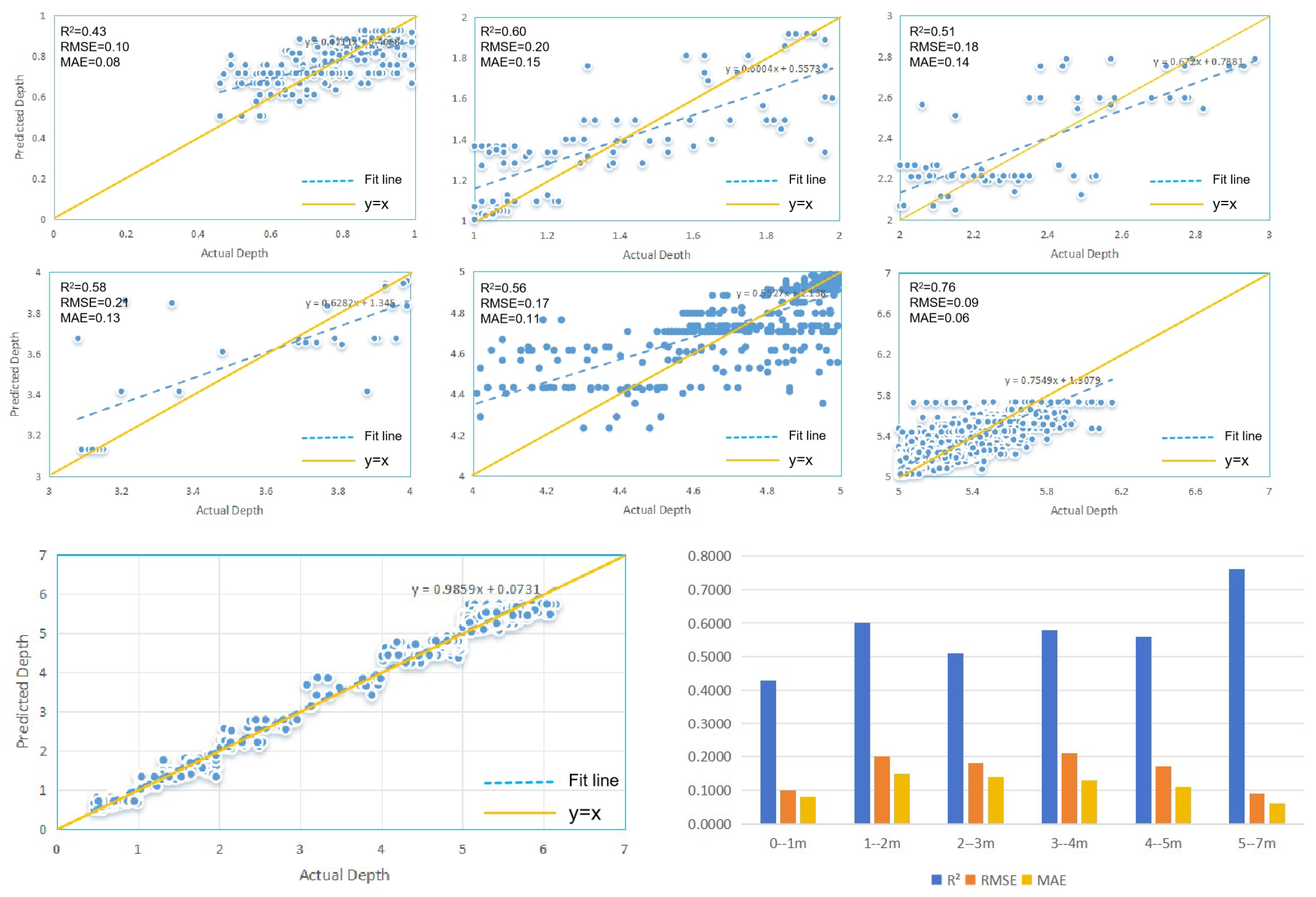
- Compared to traditional experimental schemes, the water-depth inversion model based on Rasterio and integrated with remote sensing indices, constructed using this approach, shows varying degrees of improvement in accuracy (R2 = 0.93, 0.89, 0.8, and 0.72; MAE = 0.11 m, 0.17 m, 0.25 m, and 0.27 m; RMSE = 0.25 m, 0.30 m, 0.41 m, and 0.48 m). Notably, the RF model performs best in the 5–7 m water-depth range (RMSE = 0.09 m, MAE = 0.06 m), indicating that this model is more suitable for water-depth inversion in medium- to small-sized lakes.
- (3)
- Future research should focus on optimizing reflectance extraction methods and assessing their impact on model performance. Enhancing model robustness through machine learning in diverse lake environments and integrating multi-source remote sensing data, such as high-resolution satellite and UAV imagery, will improve accuracy. Additionally, establishing a standardized water-depth inversion framework will facilitate the broader application of remote sensing in bathymetric studies.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| RF | Random forest; |
| BP | BP neural network; |
| MLR | Multi-band logarithmic ratio. |
References
- Zhang, Z.; Liu, X. Bathymetric modelling for long-term monitoring of water dynamics of Ramsar-listed lakes using inundation frequency and photon-counting LiDAR data. Ecohydrol. Hydrobiol. 2023, 25, 10–22. [Google Scholar] [CrossRef]
- Meng, J.; Yang, X.; Li, Z.; Zhao, G.; He, P.; Xuan, Y.; Wang, Y. Tracking Evapotranspiration Patterns on the Yinchuan Plain with Multispectral Remote Sensing. Sustainability 2024, 16, 8025. [Google Scholar] [CrossRef]
- Zhou, S.; Guo, J.; Zhang, H.; Jia, Y.; Sun, H.; Liu, X.; An, D. SDUST2023BCO: A global seafloor model determined from multi-layer perceptron neural network using multi-source differential marine geodetic data. Earth Syst. Sci. Data Discuss. 2024, 2024, 1–21. [Google Scholar] [CrossRef]
- Xie, Y.; Bore, N.; Folkesson, J. Sidescan only neural bathymetry from large-scale survey. Sensors 2022, 22, 5092. [Google Scholar] [CrossRef]
- Cahalane, C.; Magee, A.; Monteys, X.; Casal, G.; Hanafin, J.; Harris, P. A comparison of Landsat 8, RapidEye and Pleiades products for improving empirical predictions of satellite-derived bathymetry. Remote Sens. Environ. 2019, 233, 111414. [Google Scholar] [CrossRef]
- Polcyn, F.C.; Brown, W.L.; Sattinger, I.J. The Measurement of Water Depth by Remote-Sensing Techniques; Technical Report 8973-26-F; Willow Run Laboratories, University of Michigan: Ann Arbor, MI, USA, 1970. [Google Scholar]
- Lyzenga, D.R. Passive remote sensing techniques for mapping water depth and bottom features. Appl. Opt. 1978, 17, 379–383. [Google Scholar] [CrossRef]
- Jia, D.; Li, Y.; He, X.; Yang, Z.; Wu, Y.; Wu, T.; Xu, N. Methods to improve the accuracy and robustness of satellite-derived bathymetry through processing of optically deep waters. Remote Sens. 2023, 15, 5406. [Google Scholar] [CrossRef]
- Leng, Z.; Zhang, J.; Ma, Y.; Zhang, J. Underwater topography inversion in liaodong shoal based on GRU deep learning model. Remote Sens. 2020, 12, 4068. [Google Scholar] [CrossRef]
- Baek, S.; Kim, W. Review on Hyperspectral Remote Sensing of Tidal Zones. Ocean. Sci. J. 2025, 60, 1–21. [Google Scholar] [CrossRef]
- Chénier, R.; Faucher, M.A.; Ahola, R. Satellite-derived bathymetry for improving Canadian Hydrographic Service charts. ISPRS Int. J. -Geo-Inf. 2018, 7, 306. [Google Scholar] [CrossRef]
- Xia, H.; Li, X.; Zhang, H.; Wang, J.; Lou, X.; Fan, K.; Shi, A.; Li, D. A bathymetry mapping approach combining log-ratio and semianalytical models using four-band multispectral imagery without ground data. IEEE Trans. Geosci. Remote Sens. 2019, 58, 2695–2709. [Google Scholar]
- He, C.; Jiang, Q.; Wang, P. An Improved Physics-Based Dual-Band Model for Satellite-Derived Bathymetry Using SuperDove Imagery. Remote Sens. 2024, 16, 3801. [Google Scholar] [CrossRef]
- Shah, A.; Deshmukh, B.; Sinha, L. A review of approaches for water depth estimation with multispectral data. World Water Policy 2020, 6, 152–167. [Google Scholar]
- Kutser, T.; Hedley, J.; Giardino, C.; Roelfsema, C.; Brando, V.E. Remote sensing of shallow waters–A 50 year retrospective and future directions. Remote Sens. Environ. 2020, 240, 111619. [Google Scholar] [CrossRef]
- Yang, H.; Guo, H.; Dai, W.; Nie, B.; Qiao, B.; Zhu, L. Bathymetric mapping and estimation of water storage in a shallow lake using a remote sensing inversion method based on machine learning. Int. J. Digit. Earth 2022, 15, 789–812. [Google Scholar]
- Wu, Z.; Mao, Z.; Shen, W.; Yuan, D.; Zhang, X.; Huang, H. Satellite-derived bathymetry based on machine learning models and an updated quasi-analytical algorithm approach. Opt. Express 2022, 30, 16773–16793. [Google Scholar]
- Chu, S.; Cheng, L.; Cheng, J.; Zhang, X.; Zhang, J.; Chen, J.; Liu, J. Shallow water bathymetry based on a back propagation neural network and ensemble learning using multispectral satellite imagery. Acta Oceanol. Sin. 2023, 42, 154–165. [Google Scholar]
- Manessa, M.D.M.; Kanno, A.; Sekine, M.; Haidar, M.; Yamamoto, K.; Imai, T.; Higuchi, T. Satellite-derived bathymetry using random forest algorithm and worldview-2 imagery. GeoPlan. J. Geomat. Plan. 2016, 3, 117–126. [Google Scholar]
- Shen, W.; Wang, J.; Chen, M.; Hao, L.; Wu, Z. Research on Bathymetric Inversion Capability of Different Multispectral Remote Sensing Images in Seaports. Sensors 2023, 23, 1178. [Google Scholar] [CrossRef]
- Li, X.; Wu, Z.; Shen, W. Addressing Challenges in Port Depth Analysis: Integrating Machine Learning and Spatial Information for Accurate Remote Sensing of Turbid Waters. Sensors 2024, 24, 3802. [Google Scholar] [CrossRef]
- Zhu, J.; Yin, F.; Qin, J.; Qi, J.; Ren, Z.; Hu, P.; Zhang, J.; Zhang, X.; Wang, R. Shallow water bathymetry retrieval by optical remote sensing based on depth-invariant index and location features. Can. J. Remote Sens. 2022, 48, 534–550. [Google Scholar] [CrossRef]
- Wu, Z.; Liu, Y.; Fang, S.; Shen, W.; Mao, Z.; Wu, S. Integration of geographic features and bathymetric inversion in the Yangtze River’s Nantong Channel using gradient boosting machine algorithm with ZY-1E satellite and multibeam data. Geomatica 2024, 76, 100027. [Google Scholar] [CrossRef]
- Zhu, J.; Liu, B.; Han, Y.; Chen, Z.; Chen, J.; Ding, S.; Li, T. A reservoir bathymetry retrieval study using the depth invariant index substrate cluster. Egypt. J. Remote Sens. Space Sci. 2024, 27, 479–490. [Google Scholar] [CrossRef]
- Chen, J.; Wang, Y.; Wang, J.; Zhang, Y.; Xu, Y.; Yang, O.; Zhang, R.; Wang, J.; Wang, Z.; Lu, F.; et al. The Performance of Landsat-8 and Landsat-9 Data for Water Body Extraction Based on Various Water Indices: A Comparative Analysis. Remote Sens. 2024, 16, 1984. [Google Scholar] [CrossRef]
- Nilsson, B.; Andersen, O.B.; Knudsen, P. Assessment of the performance of SWOT for observing the static ocean topography. Geophys. Res. Lett. 2025, 52, e2024GL112290. [Google Scholar] [CrossRef]
- Li, Y.; Liu, B.; Chai, X.; Guo, F.; Li, Y.; Fu, D. Research on Shallow Water Depth Remote Sensing Based on the Improvement of the Newton–Raphson Optimizer. Water 2025, 17, 552. [Google Scholar] [CrossRef]
- Xu, X.; Pan, Q.; Wu, H.; Zhang, D.; Zhang, Z.; Gu, Y.; Wang, Z. Research on improving the accuracy of remote sensing-based bathymetry on muddy coasts. Estuarine Coast. Shelf Sci. 2025, 313, 109126. [Google Scholar] [CrossRef]
- Lee, Z.; Hu, C.; Shang, S.; Du, K.; Lewis, M.; Arnone, R.; Brewin, R. Penetration of UV-visible solar radiation in the global oceans: Insights from ocean color remote sensing. J. Geophys. Res. Ocean. 2013, 118, 4241–4255. [Google Scholar]
- Lyzenga, D.R.; Malinas, N.P.; Tanis, F.J. Multispectral bathymetry using a simple physically based algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2251–2259. [Google Scholar] [CrossRef]
- Han, Z.; Zhu, X.; Fang, X.; Wang, Z.; Wang, L.; Zhao, G.X.; Jiang, Y. Hyperspectral estimation of apple tree canopy LAI based on SVM and RF regression. Guang pu xue yu Guang pu fen xi = Guang pu 2016, 36, 800–805. [Google Scholar]
- Richardson, G.; Foreman, N.; Knudby, A.; Wu, Y.; Lin, Y. Global deep learning model for delineation of optically shallow and optically deep water in Sentinel-2 imagery. Remote Sens. Environ. 2024, 311, 114302. [Google Scholar] [CrossRef]
- Zhu, W.; Cao, T.; Luan, K.; Liu, S.; Liu, Z.; Xu, Y.; Huang, Y. A Refined Machine Learning Method for Coastal Bathymetry Retrieval Using Minimum Distance from Coastline and Geographical Features. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 20012–20025. [Google Scholar] [CrossRef]
- Li, S.; Goldberg, M.; Kalluri, S.; Lindsey, D.T.; Sjoberg, B.; Zhou, L.; Helfrich, S.; Green, D.; Borges, D.; Yang, T.; et al. High resolution 3D mapping of hurricane flooding from moderate-resolution operational satellites. Remote Sens. 2022, 14, 5445. [Google Scholar] [CrossRef]
- Matsuba, Y.; Tajima, Y.; Shimozono, T.; Martins, K.; Banno, M. Minutely monitoring of swash zone processes using a lidar-camera fusion system. Coast. Eng. 2025, 199, 104724. [Google Scholar] [CrossRef]
- Liao, Z.; Kang, Z.; Zhang, A.; Ren, J. Water Depth Retrieval by Airborne LiDAR and Aerial Image Remote Sensing: A Case Study of North Island and Gancheondo. In Proceedings of the 2024 13th International Conference on Communications, Circuits and Systems (ICCCAS), Xiamen, China, 10–12 May 2024; pp. 212–216. [Google Scholar]
- Pricope, N.G.; Bashit, M.S. Emerging trends in topobathymetric LiDAR technology and mapping. Int. J. Remote Sens. 2023, 44, 7706–7731. [Google Scholar] [CrossRef]
- Jay, S.; Guillaume, M. A novel maximum likelihood based method for mapping depth and water quality from hyperspectral remote-sensing data. Remote Sens. Environ. 2014, 147, 121–132. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measuring Instruments | Instrument Model | Accuracy |
|---|---|---|
| GPS receiver | HUACE K50 (Shanghai Huace Navigation Technology Ltd., Shanghai, China) | Static plane accuracy: ±(3.0 mm + 0.5 ppm × D) Static elevation accuracy: ±(6.0 mm + 0.5 ppm × D) |
| Single beam | Nanjing Yuanhou FX160 (Nanjing Yuanhou Electronic Technology Co., Ltd., Nanjing, China) | 1 cm ± 0.1% of depth (455 KHz: ±3 cm when depth < 0.7 m) (200 KHz: ±6 cm when depth < 1 m) |
| Unmanned boat | Type 130 single-hull unmanned boat (Wuhan Huawei Technology Co., Ltd., Wuhan, China) |
| Bands | Wavelength Range (μm) | Spatial Resolution (m) |
|---|---|---|
| Band 1 Coastal | 0.433–0.453 | 30 |
| Band 2 Blue | 0.450–0.515 | 30 |
| Band 3 Green | 0.525–0.600 | 30 |
| Band 4 Red | 0.630–0.680 | 30 |
| Band 5 NIR | 0.845–0.885 | 30 |
| Band 6 SWIR 1 | 1.560–1.660 | 30 |
| Band 7 SWIR 2 | 2.100–2.300 | 30 |
| Estimation Factors | Correlation | |
|---|---|---|
| Rasterio | GDAL | |
| B1 | 0.003 | 0.439 |
| B2 | 0.105 | 0.533 |
| B3 | 0.108 | 0.540 |
| B4 | −0.305 | 0.266 |
| B5 | −0.347 | 0.162 |
| B6 | −0.385 | 0.105 |
| B7 | −0.383 | 0.080 |
| Estimation Factors | Correlation | Estimation Factors | Correlation |
|---|---|---|---|
| B1 | −0.01 | MNDWI1 | 0.68 |
| B2 | 0.10 | CDI | −0.25 |
| B3 | 0.11 | SDI | −0.26 |
| B4 | −0.30 | NDMI | 0.40 |
| B5 | −0.35 | NDMI1 | 0.53 |
| B6 | −0.38 | GI | 0.25 |
| B7 | −0.38 | GEMVI | −0.33 |
| NDWI | 0.68 | VGCI | −0.52 |
| MNDWI | 0.69 |
| Models | Rasterio | GDAL | |||
|---|---|---|---|---|---|
| Train | Test | Train | Test | ||
| MLR | 0.66 | 0.66 | 0.57 | 0.59 | |
| RF | 0.92 | 0.92 | 0.88 | 0.88 | |
| Adaboost | 0.70 | 0.70 | 0.61 | 0.61 | |
| BP | 0.84 | 0.83 | 0.71 | 0.72 | |
| RMSE (m) | MLR | 0.53 | 0.53 | 0.60 | 0.58 |
| RF | 0.25 | 0.25 | 0.31 | 0.32 | |
| Adaboost | 0.50 | 0.50 | 0.57 | 0.57 | |
| BP | 0.37 | 0.37 | 0.49 | 0.48 | |
| MAE (m) | MLR | 0.32 | 0.32 | 0.32 | 0.32 |
| RF | 0.11 | 0.11 | 0.11 | 0.12 | |
| Adaboost | 0.29 | 0.29 | 0.31 | 0.31 | |
| BP | 0.21 | 0.21 | 0.24 | 0.24 | |
| Models | RMSE (m) | MAE (m) | |||||
|---|---|---|---|---|---|---|---|
| Train | Test | Train | Test | Train | Test | ||
| MLR | Before | 0.66 | 0.66 | 0.53 | 0.53 | 0.32 | 0.32 |
| After | 0.73 | 0.72 | 0.48 | 0.48 | 0.27 | 0.27 | |
| RF | Before | 0.92 | 0.92 | 0.25 | 0.25 | 0.11 | 0.11 |
| After | 0.92 | 0.93 | 0.25 | 0.25 | 0.11 | 0.11 | |
| Adaboost | Before | 0.70 | 0.70 | 0.50 | 0.50 | 0.29 | 0.29 |
| After | 0.80 | 0.80 | 0.41 | 0.41 | 0.25 | 0.25 | |
| BP | Before | 0.84 | 0.83 | 0.37 | 0.37 | 0.21 | 0.21 |
| After | 0.89 | 0.89 | 0.30 | 0.30 | 0.17 | 0.17 | |
| Bathymetric Interval | Average Water Depth (m) | Sample Size |
|---|---|---|
| 0–1 m | 0.77 | 706 |
| 1–2 m | 1.34 | 361 |
| 2–3 m | 2.33 | 248 |
| 3–4 m | 3.66 | 124 |
| 4–5 m | 4.73 | 1420 |
| 5–6 m | 5.34 | 24,949 |
| 6–7 m | 6.06 | 27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, J.; Wang, Y.; Liu, W.; Yang, X.; He, P. Research on the Development of an Inland Lake Bathymetry Estimation Model Based on Multispectral Data. Sensors 2025, 25, 2236. https://doi.org/10.3390/s25072236
Meng J, Wang Y, Liu W, Yang X, He P. Research on the Development of an Inland Lake Bathymetry Estimation Model Based on Multispectral Data. Sensors. 2025; 25(7):2236. https://doi.org/10.3390/s25072236
Chicago/Turabian StyleMeng, Junzhen, Yunfei Wang, Wenkai Liu, Xiaoquan Yang, and Peipei He. 2025. "Research on the Development of an Inland Lake Bathymetry Estimation Model Based on Multispectral Data" Sensors 25, no. 7: 2236. https://doi.org/10.3390/s25072236
APA StyleMeng, J., Wang, Y., Liu, W., Yang, X., & He, P. (2025). Research on the Development of an Inland Lake Bathymetry Estimation Model Based on Multispectral Data. Sensors, 25(7), 2236. https://doi.org/10.3390/s25072236