

Target Detection Method for Soil-Dwelling Termite Damage Based on MCD-YOLOv8
 , , and
, , and
Abstract
1. Introduction
- (1)
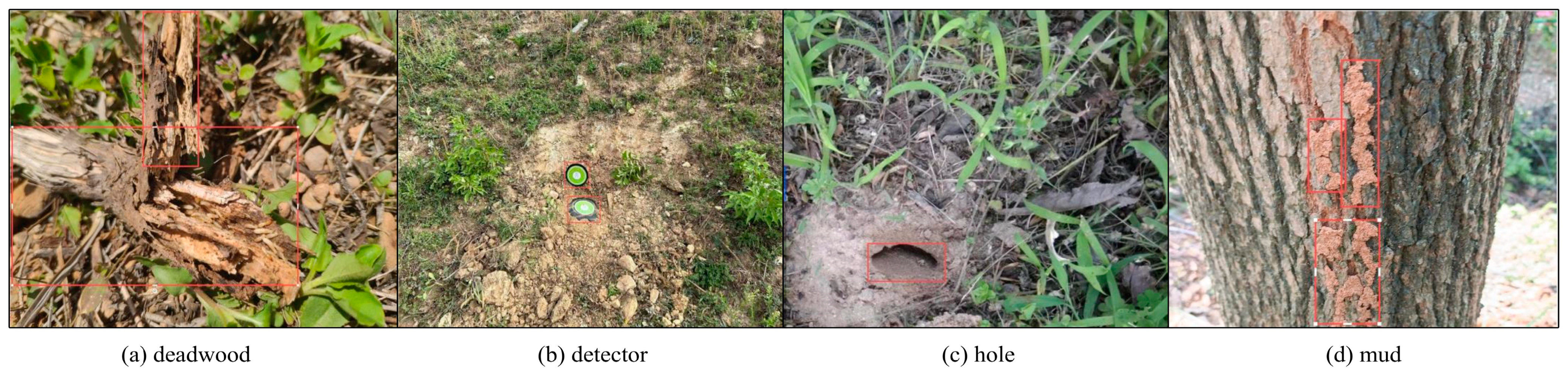
- The development of a termite damage feature dataset tailored for multi-target detection, which encompasses four distinct labels: deadwood, detector, hole, and mud;
- (2)
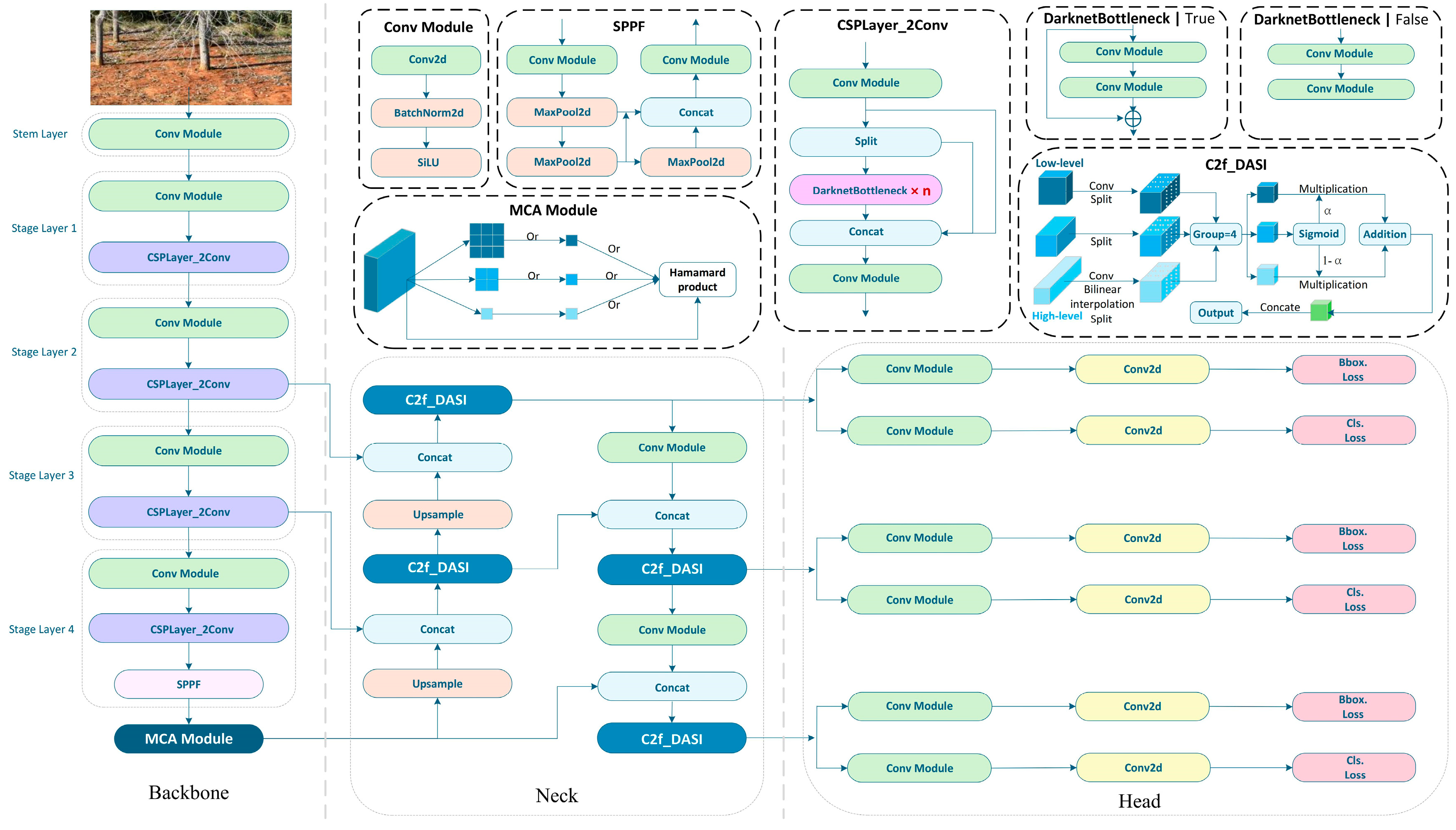
- The MCA module is introduced in the backbone part, improving the accuracy of small object detection. This module extracts local and contextual information through random sampling, thereby increasing the recognizability of small objects;
- (3)
- The DASI module is added in the neck part to reduce computation time and memory consumption, enhancing detection accuracy and speed, enabling effective multi-scale feature fusion.
2. Related Work
2.1. Target Detection Methods
2.2. Small Object Detection
3. Data Collection and Processing
3.1. Data Sources
3.2. Data Augmentation
4. Improved YOLOv8 Model
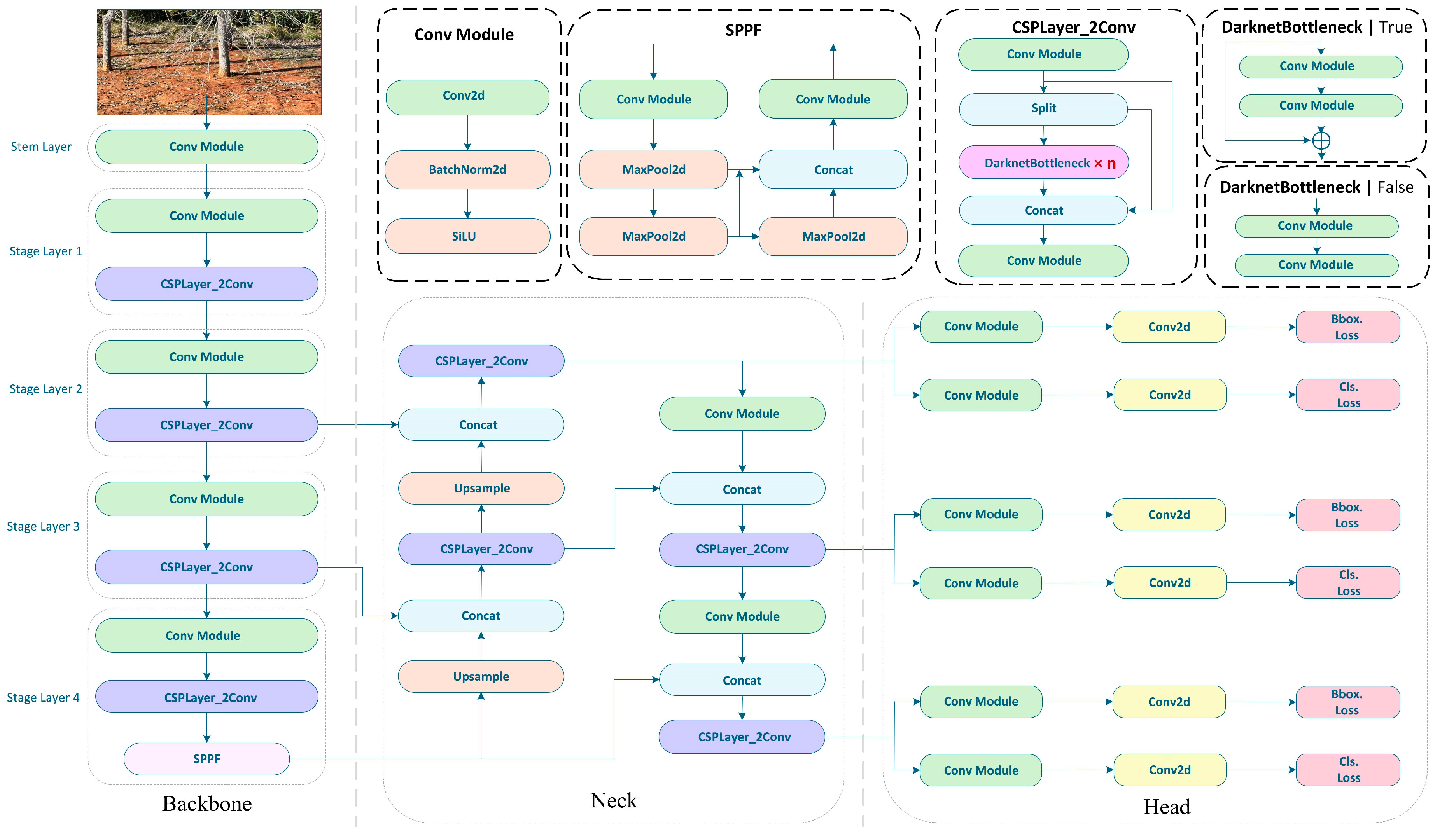
4.1. YOLOv8 Model
4.2. MCA Module
4.3. DASI Module
4.4. MCD-YOLOv8 Model
- (1)
- The integration of the MCA module within the backbone, which facilitates the extraction of both local and contextual information through random sampling, thereby improving the model’s ability to recognize small objects.
- (2)
- The adoption of the DASI module in the neck, which substitutes the C2f module and adaptively enhances fine-grained or contextual features according to varying dimensional requirements, thereby further promoting multi-scale feature fusion.
4.5. Model Evaluation Metrics
5. Results Analysis
5.1. Category Recognition Results
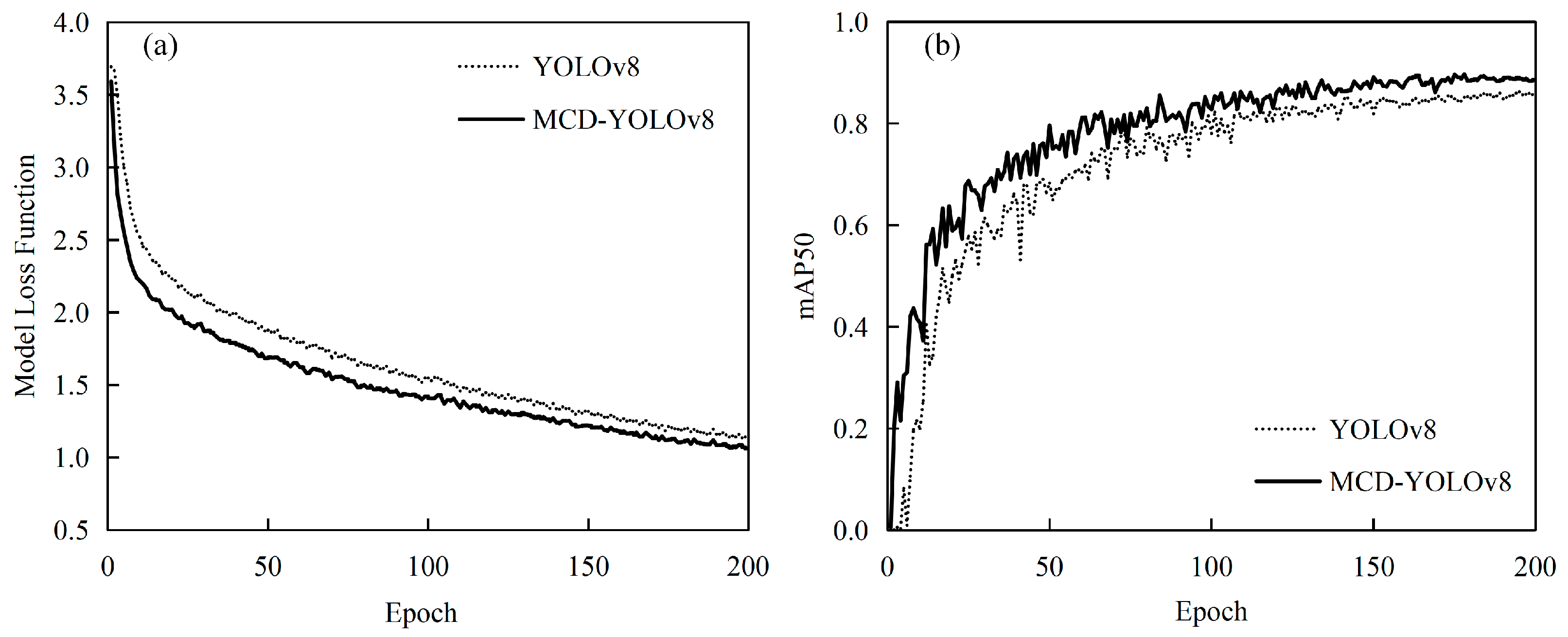
5.2. Ablation Study
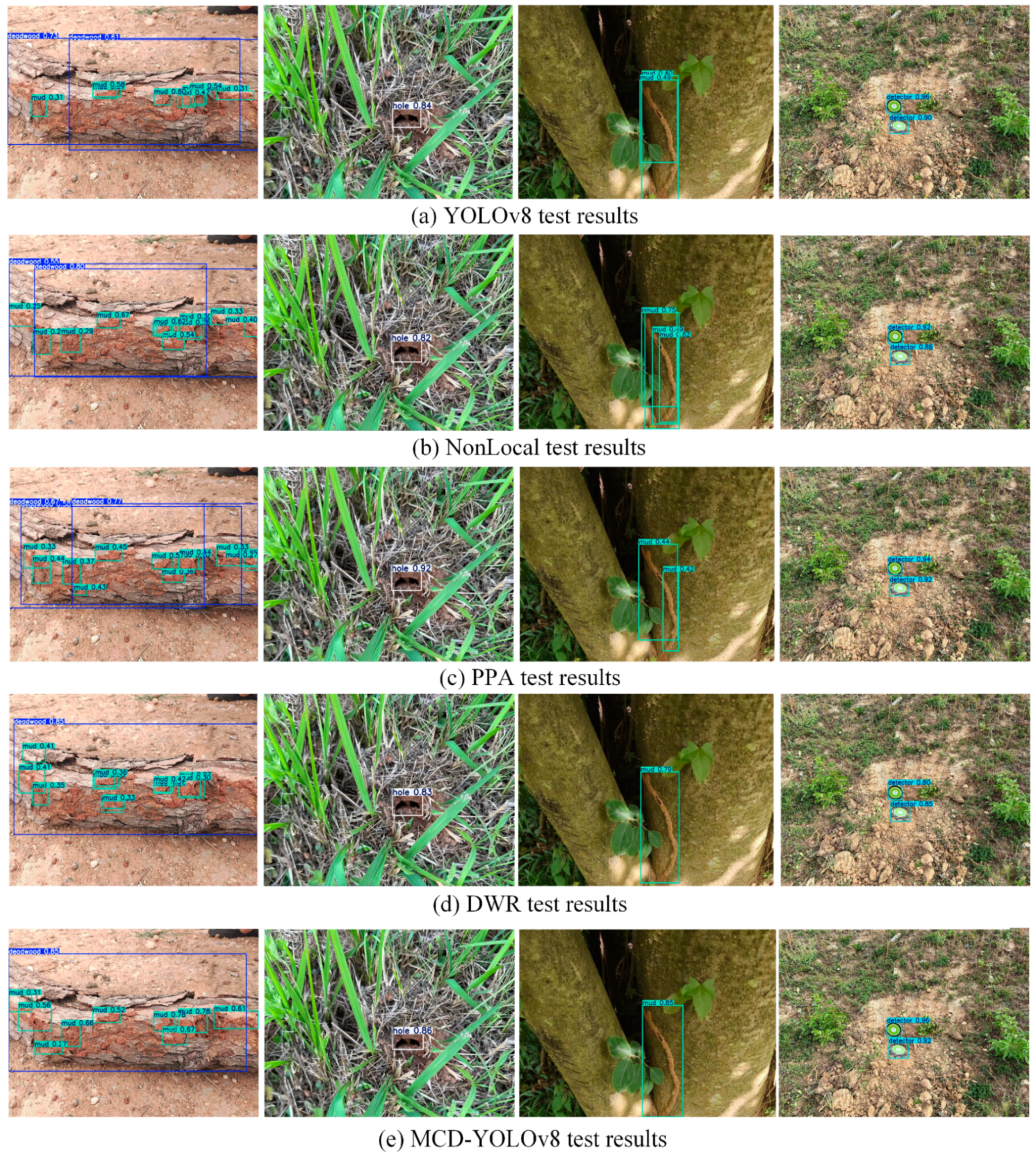
5.3. Comparison of Different Model Recognition Effects
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Verma, M.; Sharma, S.; Prasad, R. Biological Alternatives for Termite Control: A Review. Int. Biodeterior. Biodegrad. 2009, 63, 959–972. [Google Scholar]
- Sun, P.D. Studies on Mechanism of Caste Differentiation and Nestmate Discrimination in Higher Termites. Ph.D. Thesis, Huazhong Agricultural University, Wuhan, China, 2019. (In Chinese). [Google Scholar]
- Li, H. Species of Termites Attacking Trees in China. Sociobiology 2010, 56, 109–120. [Google Scholar]
- Wang, J.Z.; Li, H.; Zheng, B.; Shao, Q. Application and Promotion of New Technologies for Termite Control in Zhanghe Reservoir. Insect Res. Cent. China 2012, 8, 264–267. (In Chinese) [Google Scholar]
- Zhang, S.T.; Qu, Z.B.; Cai, Q.X.; Shi, L.; Zhang, J.S. Application Analysis of Termite Prevention and Control Technology in Water Conservancy Project. Henan Water Resour. South-North Water Divers. 2022, 51, 83–85. (In Chinese) [Google Scholar]
- Zhao, C.; Xiao, X.; Luo, S.M. Application of IPM technology for termite monitoring and trapping in Luban Reservoir. Water Conserv. Constr. Manag. 2022, 42, 70–74. (In Chinese) [Google Scholar]
- Huang, G.M. Discussion on the method of eliminating termites in housing construction in Lu’an City and water conservancy construction and management. Chin. J. Hyg. Insectic. Equip. 2014, 20, 390–391. (In Chinese) [Google Scholar]
- Huang, K.; Wei, J.G.; Wei, J.L.; Yang, M.; Chen, H.X.; Huang, F.N.; Pan, G.S. Comprehensive control technology for termites in the ancient architectural complex of Bo’ai Town, Funing County. Yunnan Agric. Sci. Technol. 2018, S1, 103–105. (In Chinese) [Google Scholar]
- Zhang, W.T.; Zhang, X.; Yang, Z.L.; Wang, W.J.; Zhang, X; Wang, J. Application of Intelligent Termite Monitoring and Control Technology in Termite Prevention and Control in Landscape Greening. Contemp. Hortic. 2024, 47, 82–84. (In Chinese) [Google Scholar]
- Song, C.G.; Ding, J.; Zhou, B.; Yan, J.M.; Deng, Z.G.; Xiao, W. Research Progress on Termite Hazards and Prevention in Chongqing City. Chin. J. Hyg. Insectic. Equip. 2020, 26, 480–485. (In Chinese) [Google Scholar]
- Xi, L.H.; Zhang, G.; Wang, X.F.; Fan, M. Research and Application of Termite Comprehensive Control Technology. Yunnan Water Power 2019, 35, 12–15. (In Chinese) [Google Scholar]
- Li, B. Guangdong Technology Center of Water Resources and Hydropower. History and Current Situation of Termite Control in Hydraulic Engineering of Guangdong Province. Guangdong Water Resour. Hydropower 2021, 12, 31–34+41. (In Chinese) [Google Scholar]
- Wang, Y.F.; Lu, W.P.; Yuan, T.; Chen, L.J.; Zhang, F. Identification of soil-dwelling termites activity signs based on ACP-YOLOv5s. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2025, 41, 387–396. (In Chinese) [Google Scholar]
- Lopes, D.J.V.; Burgreen, G.W.; dos Santos Bobadilha, G.; Barnes, H.M. Automated means to classify lab-scale termite damage. Comput. Electron. Agric. 2020, 168, 105105. [Google Scholar]
- Huang, J.H.; Liu, Y.T.; Ni, H.C.; Chen, B.Y.; Huang, S.Y.; Tsai, H.K.; Li, H.F. Termite Pest Identification Method Based on Deep Convolution Neural Networks. J. Econ. Entomol. 2021, 114, 2452–2459. [Google Scholar]
- Mankin, R.W.; Osbrink, W.L.; Oi, F.M.; Anderson, J.B. Acoustic Detection of Termite Infestations in Urban Trees. J. Econ. Entomol. 2002, 95, 981–988. [Google Scholar] [CrossRef]
- Yuki, M.; Naoki, M.; Kenji, M. Multi-functional roles of a soldier-specific volatile as a worker arrestant, primer pheromone and an antimicrobial agent in a termite. Proc. Biol. Sci. 2017, 286, 20171134. [Google Scholar]
- Hu, Y.; Zhang, L.; Deng, B.; Liu, Y.; Liu, Q.; Zheng, X.; Zheng, L.; Kong, F.; Guo, X.; Siemann, E. The non-additive effects of temperature and nitrogen deposition on CO2 emissions, nitrification, and nitrogen mineralization in soils mixed with termite nests. Catena 2017, 154, 12–20. [Google Scholar]
- Jouquet, P.; Capowiez, Y.; Bottinelli, N.; Traoré, S. Potential of Near Infrared Reflectance Spectroscopy (NIRS) for identifying termite species. Eur. J. Soil Biol. 2014, 60, 49–52. [Google Scholar]
- Luo, F.; Bian, W.; Jie, B.; Dong, H.; Fu, X. Arbfpn-yolov8: Auxiliary Reversible Bidirectional Feature Pyramid Network for UAV Small Target Detection. Signal Image Video Process. 2024, 19, 63. [Google Scholar]
- Zhang, X.; Zuo, G. Small Target Detection in UAV View Based on Improved Yolov8 Algorithm. Sci. Rep. 2025, 15, 421. [Google Scholar]
- Lv, Y.; Tian, B.; Guo, Q.; Zhang, D. A Lightweight Small Target Detection Algorithm for UAV Platforms. Appl. Sci. 2024, 15, 12. [Google Scholar] [CrossRef]
- Sun, L.; Shen, Y. Intelligent Monitoring of Small Target Detection Using Yolov8. Alex. Eng. J. 2025, 112, 701–710. [Google Scholar] [CrossRef]
- Dai, W. SvANet: A Scale-variant Attention-based Network for Small Medical Object Segmentation. arXiv 2024, arXiv:2407.07720. [Google Scholar]
- Xu, S.B.; Zheng, S.C.; Xu, W.H.; Xu, R.; Wang, C.; Zhang, J.; Teng, X.; Li, A.; Guo, L. HCF-Net: Hierarchical Context Fusion Network for Infrared Small Object Detection. In Proceedings of the 2024 IEEE International Conference on Multimedia and Expo (ICME), Niagara Falls, ON, Canada, 15–19 July 2024. [Google Scholar]
- Hao, S.; Ren, K.; Li, J.; Ma, X. Transmission Line Defect Target Detection Method Based on GR-YOLOv8. Sensors 2024, 24, 6838. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T. Region-based convolutional networks for accurate object detection and segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 142–158. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single shot multibox detector. In Computer Vision—ECCV 2016; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R. You only look once: Unified, ruth-time object detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Xu, Y.W.; Li, J.; Dong, Y.F.; Zhang, X.L. Survey of Development of YOLO Object Detection Algorithms. J. Front. Comput. Sci. Technol. 2024, 18, 2221–2239. (In Chinese) [Google Scholar]
- Gu, Q.; Sui, S.Y.; Wang, R.; Zhang, H.; Xu, T.P. Skin melanoma image segmentation algorithm based on improved YOLOv8. Comput. Eng. 2024. (In Chinese) [Google Scholar] [CrossRef]
- Zhang, L.F.; Tian, Y. Improved YOLOv8 multi-scale and lightweight vehicle object detection algorithm. Comput. Eng. Appl. 2023, 60, 129–137. (In Chinese) [Google Scholar]
- Wang, G.; Chen, Y.; An, P.; Hong, H.; Hu, J.; Huang, T. UAV-YOLOv8: A Small-object-detection Model Based on Improved Yolov8 for UAV Aerial Photography Scenarios. Sensors 2023, 23, 7190. [Google Scholar] [CrossRef]
- Jiang, W.; Wang, W.H.; Yang, J.J. AEM-YOLOv8s: Small Target Detection Algorithm for UAV Aerial Images. Comput. Eng. Appl. 2024, 60, 191–202. (In Chinese) [Google Scholar]
- Li, Y.; Li, Q.; Pan, J.; Zhou, Y.; Zhu, H.; Wei, H.; Liu, C. Sod-yolo: Small-object-detection Algorithm Based on Improved Yolov8 for UAV Images. Remote Sens. 2024, 16, 3057. [Google Scholar] [CrossRef]
- Huang, K.; Li, D.L. Improved YOLOv8-based Personnel Detection from a Drone’s Perspective. J. Chongqing Technol. Bus. Univ. (Nat. Sci. Ed.) 2025. Available online: https://link.cnki.net/urlid/50.1155.N.20250227.1711.006 (accessed on 20 January 2025). (In Chinese).
- Feng, S.; Huang, Y.; Zhang, N. An Improved Yolov8 OBB Model for Ship Detection Through Stable Diffusion Data Augmentation. Sensors 2024, 24, 5850. [Google Scholar] [CrossRef] [PubMed]
- Marullo, G.; Ulrich, L.; Antonaci, F.G.; Audisio, A.; Aprato, A.; Massè, A.; Vezzetti, E. Classification of AO/OTA 31A/B Femur Fractures in X-ray Images Using Yolov8 and Advanced Data Augmentation Techniques. Bone Rep. 2024, 22, 101801. [Google Scholar] [PubMed]
- Chen, F.Q.; Deng, M.L.; Gao, H.; Yang, X.; Zhang, D. NHD-YOLO: Improved Yolov8 Using Optimized Neck and Head for Product Surface Defect Detection with Data Augmentation. IET Image Process. 2024, 18, 1915–1926. [Google Scholar]
- Luo, W.; Yuan, S. Enhanced Yolov8 for Small-object Detection in Multiscale UAV Imagery: Innovations in Detection Accuracy and Efficiency. Digit. Signal Process. 2025, 158, 104964. [Google Scholar]
- Yilmaz, B.; Kutbay, U. Yolov8-based Drone Detection: Performance Analysis and Optimization. Computers 2024, 13, 234. [Google Scholar] [CrossRef]
- Zhou, M.; Wan, X.; Yang, Y.; Zhang, J.; Li, S.; Zhou, S.; Jiang, X. EBR-YOLO: A Lightweight Detection Method for Non-motorized Vehicles Based on Drone Aerial Images. Sensors 2025, 25, 196. [Google Scholar] [CrossRef]
- Alhawsawi, A.N.; Khan, S.D.; Rehman, F.U. Enhanced Yolov8-based Model with Context Enrichment Module for Crowd Counting in Complex Drone Imagery. Remote Sens. 2024, 16, 4175. [Google Scholar] [CrossRef]
- Chen, M.; Zheng, Z.; Sun, H.; Ma, D. Yolov8-mds: A Yolov8-based Multi-distance Scale Drone Detection Network. J. Phys. Conf. Ser. 2024, 2891, 152008. [Google Scholar]
- Casas, E.; Ramos, L.; Romero, C.; Rivas-Echeverría, F. A Comparative Study of Yolov5 and Yolov8 for Corrosion Segmentation Tasks in Metal Surfaces. Array 2024, 22, 100351. [Google Scholar]
- Lou, H.; Duan, X.; Guo, J.; Liu, H.; Gu, J.; Bi, L.; Chen, H. Dc-yolov8: Small-size Object Detection Algorithm Based on Camera Sensor. Electronics 2023, 12, 2323. [Google Scholar] [CrossRef]
- Jin, Y.; Tian, X.; Zhang, Z.; Liu, P.; Tang, X. C2F: An effective coarse-to-fine network for video summarization. Image Vis. Comput. 2024, 144, 104962. [Google Scholar]
- Pan, J.; Zhang, Y. Small Object Detection in Aerial Drone Imagery Based on Yolov8. IAENG Int. J. Comput. Sci. 2024, 51, 1346–1354. [Google Scholar]
- Sun, H.; Shen, Q.; Ke, H.; Duan, Z.; Tang, X. Power Transmission Lines Foreign Object Intrusion Detection Method for Drone Aerial Images Based on Improved Yolov8 Network. Drones 2024, 8, 346. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Instances | P | R | mAP50 |
|---|---|---|---|---|
| ALL | 4156 | 0.880 | 0.842 | 0.886 |
| Deadwood | 1211 | 0.891 | 0.884 | 0.923 |
| Detector | 131 | 0.979 | 1 | 0.995 |
| Hole | 125 | 0.795 | 0.839 | 0.867 |
| Mud | 2689 | 0.857 | 0.645 | 0.758 |
| MCA | DASI | P | R | mAP50 | Parameters |
|---|---|---|---|---|---|
| × | × | 0.816 | 0.841 | 0.862 | 3,006,428 |
| √ | × | 0.823 | 0.840 | 0.860 | 3,138,012 |
| × | √ | 0.847 | 0.829 | 0.860 | 2,769,524 |
| √ | √ | 0.880 | 0.842 | 0.886 | 2,901,108 |
| Model | Images | Instances | P | R | mAP | Parameters |
|---|---|---|---|---|---|---|
| YOLOv8 | 418 | 1142 | 0.816 | 0.841 | 0.862 | 3,006,428 |
| NonLocal | 418 | 1142 | 0.840 | 0.837 | 0.886 | 3,270,108 |
| PPA | 418 | 1142 | 0.825 | 0.817 | 0.864 | 5,177,668 |
| DWR | 418 | 1142 | 0.879 | 0.838 | 0.885 | 2,945,020 |
| MCD-YOLOv8 | 418 | 1142 | 0.880 | 0.842 | 0.886 | 2,901,108 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, P.; Jiang, L.; Wu, F.; Che, T.; Wang, M.; Zheng, C. Target Detection Method for Soil-Dwelling Termite Damage Based on MCD-YOLOv8. Sensors 2025, 25, 2199. https://doi.org/10.3390/s25072199
Jiang P, Jiang L, Wu F, Che T, Wang M, Zheng C. Target Detection Method for Soil-Dwelling Termite Damage Based on MCD-YOLOv8. Sensors. 2025; 25(7):2199. https://doi.org/10.3390/s25072199
Chicago/Turabian StyleJiang, Peidong, Lai Jiang, Fengyan Wu, Tengteng Che, Ming Wang, and Chuandong Zheng. 2025. "Target Detection Method for Soil-Dwelling Termite Damage Based on MCD-YOLOv8" Sensors 25, no. 7: 2199. https://doi.org/10.3390/s25072199
APA StyleJiang, P., Jiang, L., Wu, F., Che, T., Wang, M., & Zheng, C. (2025). Target Detection Method for Soil-Dwelling Termite Damage Based on MCD-YOLOv8. Sensors, 25(7), 2199. https://doi.org/10.3390/s25072199