

A Lossless Scalar Calibration Algorithm Used for Tri-Axial Magnetometer Cross Array and Its Effectiveness Validation

Abstract
1. Introduction
2. Calibration Methodology
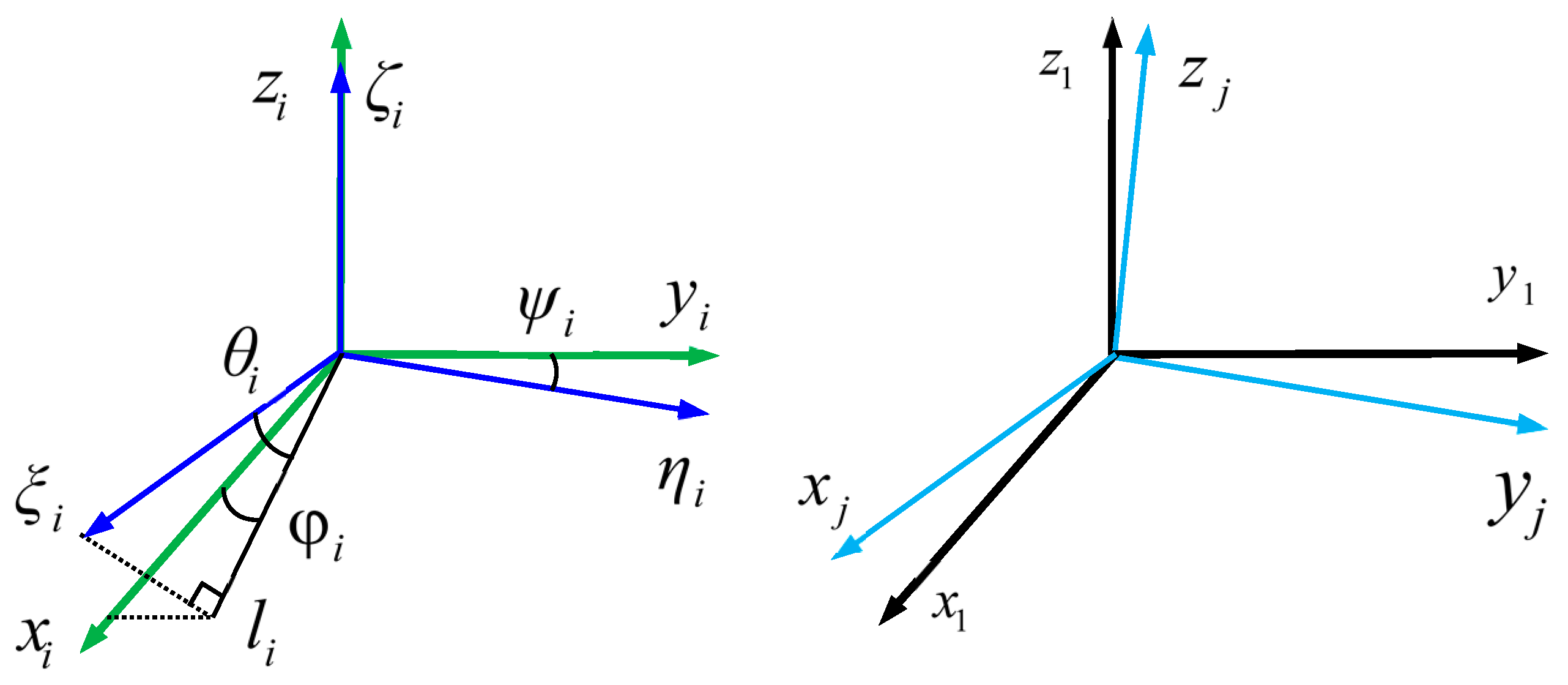
2.1. Error Model of the TAMCA
2.2. Principal of Lossless Scalar Calibration Algorithm
3. Calibration Effectiveness Validation Method
3.1. Validation Using the Measurement of MI
3.2. Validation Using Magnetic Source Localization
4. Calibration Algorithm Testing
4.1. Numerical Simulations
4.2. Experimental Tests
 ,
,  ,
,  , and
, and  represent the results in the x-axis, y-axis, z-axis, and r-axis before calibration, and
represent the results in the x-axis, y-axis, z-axis, and r-axis before calibration, and  ,
,  ,
,  , and
, and  represent the results in the x-axis, y-axis, z-axis, and r-axis after calibration. The RMSEs of the localization in the x-axis, y-axis, z-axis, and r-axis are 0.2350 m, 0.3717 m, 0.0800 m, and 0.2924 m before calibration, and they are 0.2620 m, 0.2418 m, 0.0431 m, and 0.2516 m after calibration, respectively. Overall, the lossless scalar calibration of the FTAMCA improves the constrained Euler localization precision of the energized circular coil.
represent the results in the x-axis, y-axis, z-axis, and r-axis after calibration. The RMSEs of the localization in the x-axis, y-axis, z-axis, and r-axis are 0.2350 m, 0.3717 m, 0.0800 m, and 0.2924 m before calibration, and they are 0.2620 m, 0.2418 m, 0.0431 m, and 0.2516 m after calibration, respectively. Overall, the lossless scalar calibration of the FTAMCA improves the constrained Euler localization precision of the energized circular coil.5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ji, S.; Zhang, H.; Wang, Y.; Rong, L.; Shi, Y.; Chen, Y. Three-dimensional inversion of full magnetic gradient tensor data based on hybrid regularization method. Geophys. Prospect. 2019, 67, 226–261. [Google Scholar] [CrossRef]
- Clark, D.A. New methods for interpretation of magnetic vector and gradient tensor data I: Eigenvector analysis and the normalised source strength. Explor. Geophys. 2012, 43, 267–282. [Google Scholar] [CrossRef]
- Wang, Y.; Rong, L.; Qiu, L.; Lukyanenko, D.V.; Yagola, A.G. Magnetic susceptibility inversion method with full tensor gradient data using low-temperature SQUIDs. Pet. Sci. 2019, 16, 794–807. [Google Scholar] [CrossRef]
- Heath, P.; Heinson, G.; Greenhalgh, S. Some comments on potential field tensor data. Explor. Geophys. 2003, 34, 57–62. [Google Scholar] [CrossRef]
- Liu, K.; Sui, Y.; Cheng, H.; Wang, Z.; Clark, D.A. Magnetic Dipole Moment Determination Using Near-Field Magnetic Gradient Tensor Data. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1169–1173. [Google Scholar] [CrossRef]
- Pang, H.; Pan, M.; Wan, C.; Chen, J.; Zhu, X.; Luo, F. Integrated compensation of magnetometer array magnetic distortion field and improvement of magnetic object localization. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5670–5676. [Google Scholar] [CrossRef]
- Pang, H.; Luo, S.; Zhang, Q.; Li, J.; Chen, D.; Pan, M.; Luo, F. Calibration of a fluxgate magnetometer array and its application in magnetic object localization. Meas. Sci. Technol. 2013, 24, 075102. [Google Scholar] [CrossRef]
- Hong, J.H.; Kang, D.; Kim, I.-J. A Unified Method for Robust Self-Calibration of 3-D Field Sensor Arrays. IEEE Trans. Instrum. Meas. 2021, 70, 1007211. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, H.; Zhang, X.; Lyu, W.; Li, X.; Sang, S. A correction method of magnetic gradient tensor system to improve magnet localization accuracy. Sens. Actuators A 2024, 369, 115194. [Google Scholar] [CrossRef]
- Wang, C.; Qu, X.; Zhang, X.; Zhu, W.; Fang, G. A Fast Calibration Method for Magnetometer Array and the Application of Ferromagnetic Target Localization. IEEE Trans. Instrum. Meas. 2017, 66, 1743–1750. [Google Scholar] [CrossRef]
- Huang, Y.; Wu, L.; Wang, Y.; Xu, Y. Scalar calibration of total instrument errors of tri-axial magnetometer using constrained optimization independent of magnetic field intensity. IEEE Sens. J. 2024, 24, 14352–14360. [Google Scholar] [CrossRef]
- Keene, M.N.; Hubphrey, K.P.; Horton, T.J. Actively shielded, adaptively balanced SQUID gradiometer system for operation aboard moving platforms. IEEE Trans. Appl. Supercond. 2005, 15, 761–764. [Google Scholar]
- Sui, Y.; Miao, H.; Wang, Y.; Luan, H.; Lin, J. Correction of a towed airborne fluxgate magnetic tensor gradiometer. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1837–1841. [Google Scholar]
- Sui, Y.; Liu, S.; Zhou, Z.; Wang, Y.; Cheng, D. Invariant Calibration of Magnetic Tensor Gradiometers. IEEE Magn. Lett. 2017, 8, 650105. [Google Scholar] [CrossRef]
- Ding, X.; Li, Z.; Li, Y.; Liu, H. Calibration of magnetic gradient tensor system with differential evolution algorithm. Chin. J. Geophys. 2022, 65, 4930–4943. (In Chinese) [Google Scholar]
- Liu, S.; Sui, Y.; Cheng, H.; Zhang, Z.; Clark, D. Accuracy evaluation of calibrating magnetic tensor gradiometer from total-field gradient measurements in aeromagnetic survey. IEEE Trans. Instrum. Meas. 2021, 70, 1007715. [Google Scholar] [CrossRef]
- Schiffler, M.; Queitsch, M.; Stolz, R.; Chwala, A.; Krech, W.; Meyer, H.G.; Kukowski, N. Calibration of SQUID vector magnetometers in full tensor gradiometry systems. Geophys. J. Int. 2014, 198, 954–964. [Google Scholar] [CrossRef]
- Lv, J.; Yu, Z.; Huang, J.; Zhou, J. The Compensation Method of Vehicle Magnetic Interference for the Magnetic Gradiometer. Adv. Math. Phys. 2013, 2013, 523164. [Google Scholar]
- Tilbrook, D.L. Rotating magnetic tensor gradiometry and a superconducting implementation. Supercond. Sci. Technol. 2009, 22, 075002. [Google Scholar]
- Yin, G.; Zhang, Y.; Fan, H.; Zhang, G.; Ren, G. Linear calibration method of magnetic gradient tensor systems. Measurement 2014, 56, 8–18. [Google Scholar]
- Li, Q.; Li, Z.; Zhang, Y.; Yin, G. Artificial vector calibration method for differencing magnetic gradient tensor systems. Sensors 2018, 18, 361. [Google Scholar] [CrossRef] [PubMed]
- Jia, W.; Lin, C.; Chen, C.; Zhai, G. Method of rotating-calculating magnetic gradient tensor. J. Natl. Univ. Def. Technol. 2018, 40, 183–188. (In Chinese) [Google Scholar]
- Sunderland, A.; Ju, L.; Blair, D.G.; McRae, W.; Veryaskin, A.V. Optimizing a direct string magnetic gradiometer for geophysical exploration. Rev. Sci. Instrum. 2009, 80, 104705. [Google Scholar] [PubMed]
- Huang, Y.; Hao, Y. Effect of three no-co-point axes in a magnetometer on underwater geomagnetic localization precision. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2010, 38, 74–78. (In Chinese) [Google Scholar]
- Wu, L.; Huang, Y.; Feng, D. Experimental investigation on the Euler-type location and orientation algorithm using magnetic field and its gradient tensor. J. Magn. Magn. Mater. 2022, 546, 168745. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error Parameters | Unit | 1st TAM | 2nd TAM | 3rd TAM | 4th TAM |
|---|---|---|---|---|---|
| δSx | 0.03 | 0.02 | −0.02 | −0.05 | |
| δSy | 0.02 | −0.04 | 0.01 | 0.03 | |
| δSz | −0.02 | 0.05 | 0.03 | −0.03 | |
| B0x | nT | 36 | −27 | 38 | 31 |
| B0y | 22 | 35 | −31 | −28 | |
| B0z | −24 | −41 | 24 | −25 | |
| θ | ° | 0.14 | −0.34 | 0.22 | 0.45 |
| φ | −0.15 | −0.26 | −0.18 | −0.38 | |
| ψ | 0.21 | 0.35 | 0.31 | 0.32 | |
| α | 0 | −0.028 | 0.031 | 0.035 | |
| β | 0 | 0.034 | −0.028 | −0.033 | |
| γ | 0 | −0.026 | 0.017 | 0.032 |
| Error Parameter | Unit | 1st FTAM | 2nd FTAM | 3rd FTAM | 4th FTAM |
|---|---|---|---|---|---|
| δSx | −0.0103 | 0.0062 | 0.0083 | 0.0023 | |
| δSy | 0.0076 | −0.0129 | −0.0124 | 0.0140 | |
| δSz | 0.0174 | 0.0038 | −0.0004 | −0.0143 | |
| B0x | nT | 11.8467 | −6.0092 | −13.6844 | −5.3428 |
| B0y | 26.1961 | 15.7185 | 10.3250 | 14.6912 | |
| B0z | −17.8786 | 10.6258 | 29.7575 | 2.9363 | |
| θ | ° | 0.0387 | 0.0174 | 0.0253 | 0.0165 |
| φ | 0.0646 | 0.0981 | 0.0861 | 0.0987 | |
| ψ | −0.0622 | −0.0683 | −0.0650 | −0.0715 | |
| α | 0 | 0.0164 | 0.0074 | 0.0127 | |
| β | 0 | 0.0118 | 0.0117 | 0.0145 | |
| γ | 0 | −0.0093 | −0.0155 | −0.0080 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, L.; Huang, Y.; Chen, X. A Lossless Scalar Calibration Algorithm Used for Tri-Axial Magnetometer Cross Array and Its Effectiveness Validation. Sensors 2025, 25, 2164. https://doi.org/10.3390/s25072164
Wu L, Huang Y, Chen X. A Lossless Scalar Calibration Algorithm Used for Tri-Axial Magnetometer Cross Array and Its Effectiveness Validation. Sensors. 2025; 25(7):2164. https://doi.org/10.3390/s25072164
Chicago/Turabian StyleWu, Lihua, Yu Huang, and Xintong Chen. 2025. "A Lossless Scalar Calibration Algorithm Used for Tri-Axial Magnetometer Cross Array and Its Effectiveness Validation" Sensors 25, no. 7: 2164. https://doi.org/10.3390/s25072164
APA StyleWu, L., Huang, Y., & Chen, X. (2025). A Lossless Scalar Calibration Algorithm Used for Tri-Axial Magnetometer Cross Array and Its Effectiveness Validation. Sensors, 25(7), 2164. https://doi.org/10.3390/s25072164