
A Novel Method for Noise Reduction and Jump Correction of Maglev Gyroscope Rotor Signals Under Instantaneous Perturbations


Abstract
1. Introduction
2. Gyroscope Orientation Measurement Principle and Error Analysis
2.1. Torque Balance Orientation Mode of Maglev Gyroscope
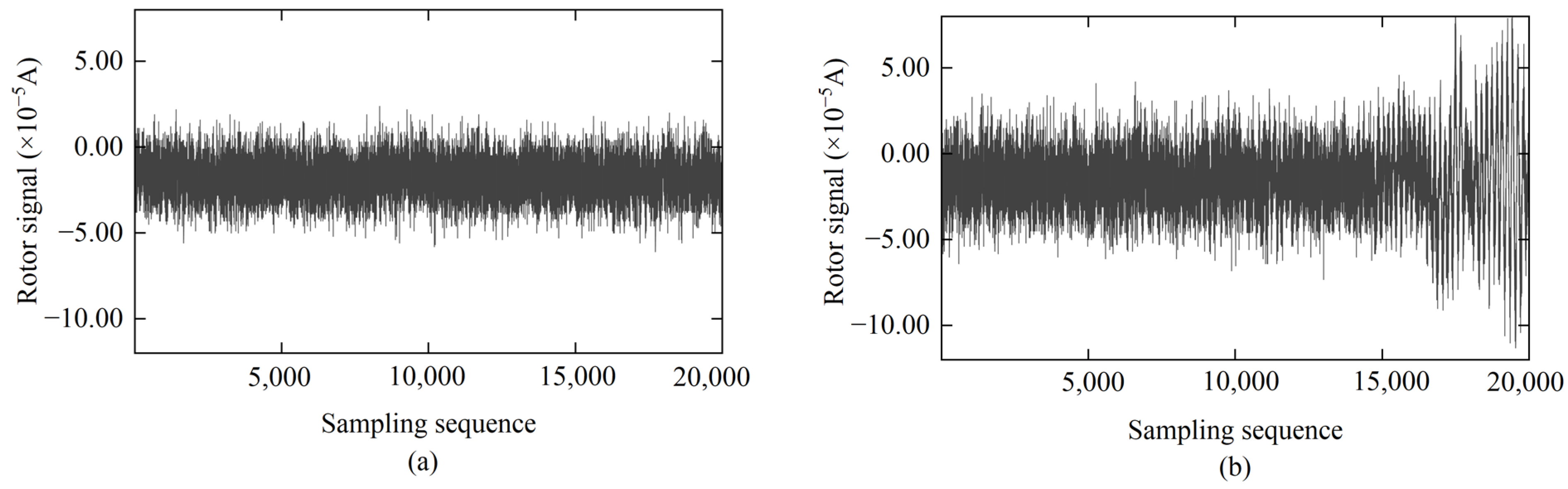
2.2. Error Analysis of Rotor Signals Under Instantaneous Vibration Interference
3. Methodology
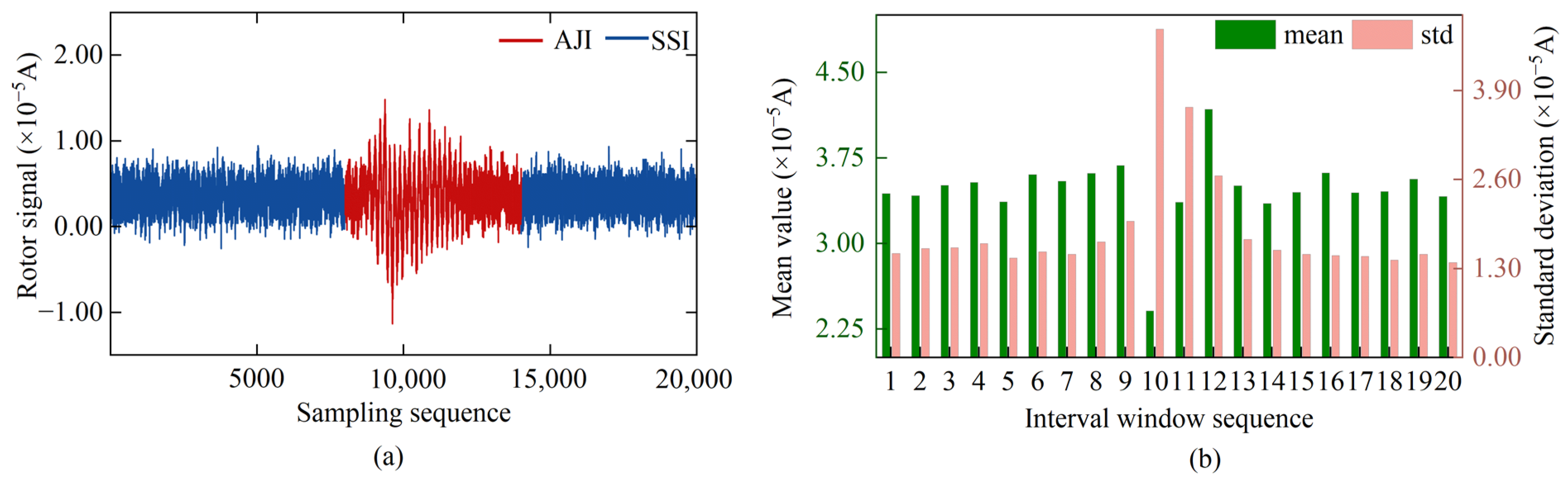
3.1. Segmentation of Rotor Signal Intervals
3.2. Noise Processing Methods for Decomposed Components of Rotor Signals
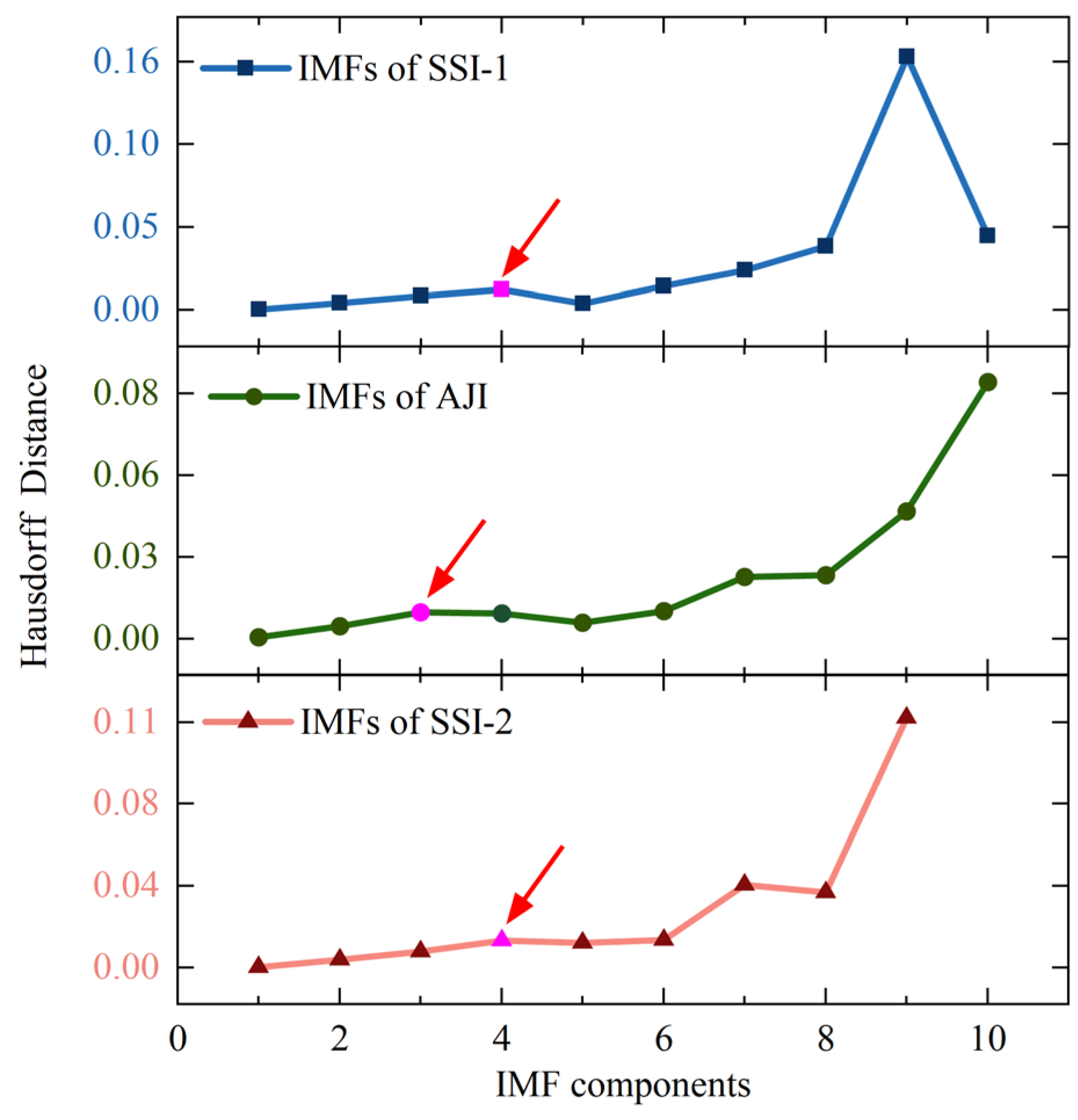
3.2.1. Adaptive Decomposition of Rotor Signals and Extraction of Effective Components
3.2.2. Noise Reduction Method for Rotor SDCs Based on MAF
3.2.3. Correction Processing of SDC Noise Reduction Results
3.3. Prediction and Fusion of Rotor Signal Trend Data
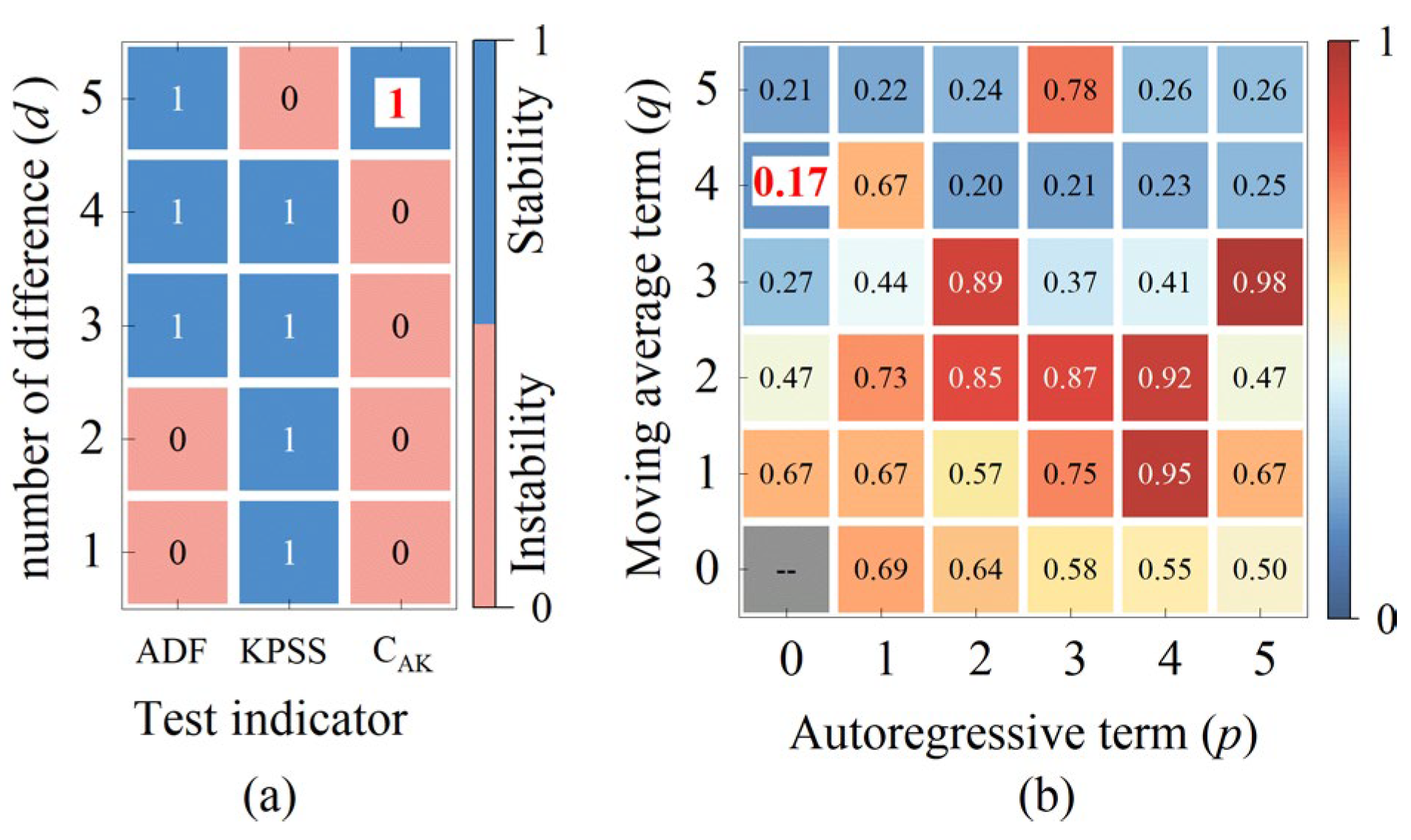
3.3.1. ARIMA Prediction Model
3.3.2. Bilateral Linear Weighted Fusion of Prediction Results
4. Results Analysis and Discussion
4.1. Experimental Data Source and Evaluation Indicators
4.2. Processing Results of the Jumping Rotor Signal
4.2.1. Processing Results of the Rotor Signals with Midrange Jumps
4.2.2. Statistical Results of Noise Reduction for Sampling Data in the Experimental Area
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Su, Q.; Zhu, Y.; Chen, Y.; Fang, L.; Yan, Y.; Su, Z.; de Wit, H.; Li, Y. Hong Kong Zhuhai Macao Bridge-Tunnel project immersed tunnel and artificial islands—From an Owners’ perspective. Tunn. Undergr. Space Technol. 2022, 121, 104308. [Google Scholar] [CrossRef]
- Jiang, Y.; Hu, R.; Yang, L. Study on the application of gyroscopic theodolite in geographical spatial orientation: Take Xi’an metro project as a case. J. Northwest Univ. Nat. Sci. Ed. 2011, 41, 145–149. [Google Scholar]
- Ma, J.; Yang, Z.; Shi, Z.; Liu, C.; Yin, H.; Zhang, X. Adjustment options for a survey network with magnetic levitation gyro data in an immersed under-sea tunnel. Surv. Rev. 2019, 51, 373–386. [Google Scholar] [CrossRef]
- Zhang, Z.-L.; Chen, H.; Zhou, Z.-F. Complex rapid omnibearing north seeking of pendulous gyroscope. Opt. Precis. Eng. 2013, 21, 3072–3079. [Google Scholar] [CrossRef]
- Shi, Z.; Yang, Z.; He, K. Azimuth information processing optimization method for a magnetically suspended gyroscope. J. Intell. Fuzzy Syst. 2018, 34, 787–796. [Google Scholar] [CrossRef]
- Gong, Y.; Yang, Z.; Shi, Z. Technical characteristics of GAT high accuracy magnetic suspension gyro station and application in mine surveying. Sci. Surv. Mapp. 2012, 37, 185–187. [Google Scholar]
- Zhou, Z.; Yang, Z.; Li, X. Maglev gyro total station errors modeling by time series analysis. Sci. Surv. Mapp. 2013, 38, 16–18. [Google Scholar]
- Ma, J.; Yang, Z.; Shi, Z.; Zhang, X.; Liu, C. Application and Optimization of Wavelet Transform Filter for North-Seeking Gyroscope Sensor Exposed to Vibration. Sensors 2019, 19, 3624. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X. Research on Data Processing of Maglev Gyroscope Based on Frequency Domain Analysis and Multivariate Filtering. Master’s Thesis, Chang’an University, Xi’an, China, 2019. [Google Scholar]
- Wang, Y.; Yang, Z.; Ma, J.; Shi, Z.; Liu, D.; Shi, L.; Li, H. A Novel Method for Automatic Detection and Elimination of the Jumps Caused by the Instantaneous Disturbance Torque in the Maglev Gyro Signal. Sensors 2023, 23, 2763. [Google Scholar] [CrossRef]
- Shi, Z.; Yang, Z.; Ma, J. The detection method of maglev gyroscope abnormal data based on the characteristics of two positioning. Sci. Surv. Mapp. 2015, 40, 102–105, 109. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- He, L.Y.; Ju, B.X.; Jiang, W.P.; Fan, W.L.; Yuan, P.; Hu, J.L.; Chen, Q.S. A multimodal natural frequency identification method of long-span bridges using GNSS. Meas. Sci. Technol. 2023, 34, 105122. [Google Scholar] [CrossRef]
- Karimi, D.; Salcudean, S.E. Reducing the Hausdorff Distance in Medical Image Segmentation With Convolutional Neural Networks. IEEE Trans. Med. Imaging 2020, 39, 499–513. [Google Scholar] [CrossRef]
- Taha, A.A.; Hanbury, A. An Efficient Algorithm for Calculating the Exact Hausdorff Distance. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 2153–2163. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.B.; Liu, W.X.; Lin, C.; Li, M.Y.; Zheng, Y.K.; Liu, D. Fault detection system of subway sliding plug door based on adaptive EMD method. Meas. Sci. Technol. 2024, 35, 015102. [Google Scholar] [CrossRef]
- Wu, M.; Sun, M.; Zhang, F.; Wang, L.; Zhao, N.; Wang, J.; Huang, W. A fault detection method of electric vehicle battery through Hausdorff distance and modified Z-score for real-world data. J. Energy Storage 2023, 60, 106561. [Google Scholar] [CrossRef]
- Liu, C.; Yang, Z.; Shi, Z.; Ma, J.; Cao, J. A Gyroscope Signal Denoising Method Based on Empirical Mode Decomposition and Signal Reconstruction. Sensors 2019, 19, 5064. [Google Scholar] [CrossRef]
- Liu, J.H.; Gao, Z.Z.; Li, Y.; Lv, S.; Liu, J.; Yang, C. Ranging Offset Calibration and Moving Average Filter Enhanced Reliable UWB Positioning in Classic User Environments. Remote Sens. 2024, 16, 2511. [Google Scholar] [CrossRef]
- Pan, Z.F.; Wang, X.H.; Hoang, T.T.G.; Tian, L.F. An enhanced phase-locked loop for non-ideal grids combining linear active disturbance controller with moving average filter. Int. J. Electr. Power Energy Syst. 2023, 149, 109021. [Google Scholar] [CrossRef]
- Li, Y.R.; Su, Z.C.; Chen, K.; Zhang, W.X.; Du, M. Application of an EMG interference filtering method to dynamic ECGs based on an adaptive wavelet-Wiener filter and adaptive moving average filter. Biomed. Signal Process. Control 2022, 72, 103344. [Google Scholar] [CrossRef]
- Talordphop, K.; Sukparungsee, S.; Areepong, Y. On designing new mixed modified exponentially weighted moving average- exponentially weighted moving average control chart. Results Eng. 2023, 18, 101152. [Google Scholar] [CrossRef]
- Halili, R.; Yousaf, F.Z.; Slamnik-Krijestorac, N.; Yilma, G.M.; Liebsch, M.; Berkvens, R.; Weyn, M. Self-Correcting Algorithm for Estimated Time of Arrival of Emergency Responders on the Highway. IEEE Trans. Veh. Technol. 2023, 72, 340–356. [Google Scholar] [CrossRef]
- Zhang, G.P. Time series forecasting using a hybrid ARIMA and neural network model. Neurocomputing 2003, 50, 159–175. [Google Scholar] [CrossRef]
- Yin, L.; Tang, S.; Li, S.; He, Y. Traffic Flow Prediction Based on Hybrid Model of Auto-Regressive Integrated Moving Average and Genetic Particle Swarm Optimization Wavelet Neural Network. J. Electron. Inf. Technol. 2019, 41, 2273–2279. [Google Scholar] [CrossRef]
- Dong, Z.; Yang, D.; Reindl, T.; Walsh, W.M. Short-term solar irradiance forecasting using exponential smoothing state space model. Energy 2013, 55, 1104–1113. [Google Scholar] [CrossRef]
- Chen, J.; Cai, M.; Shen, Q.; Shi, Y.; Yang, L.; Li, L. A Predictive Model Based on Singular Spectrum Analysis and ARIMA Model With Adaptive Orders for Shield Tunneling Machine Cutterhead Torque. IEEE Sens. J. 2023, 23, 27645–27657. [Google Scholar] [CrossRef]
- Borawski, P.; Holden, L.; Beldycka-Borawska, A. Perspectives of photovoltaic energy market development in the european union. Energy 2023, 270, 126804. [Google Scholar] [CrossRef]
- Thiruchelvam, L.; Dass, S.C.; Asirvadam, V.S.; Daud, H.; Gill, B.S. Determine neighboring region spatial effect on dengue cases using ensemble ARIMA models. Sci. Rep. 2021, 11, 5873. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, L.; Wang, X. Loosely Coupled GNSS/INS Integration Based on Factor Graph and Aided by ARIMA Model. IEEE Sens. J. 2021, 21, 24379–24387. [Google Scholar] [CrossRef]
- Wang, J.; Huang, Z.; Yu, L. Three plies in top coaltheory and its application in top coal caving mining for ultra-thick coal seams. J. China Coal Soc. 2017, 42, 809–816. [Google Scholar]
- Ji, L.; Zhou, C.; Zhang, B.; Wang, F. Study on Dynamic Response and Damage Effect of Surrounding Rock in Large Tunnel under Blasting Excavation. J. China Railw. Soc. 2021, 43, 161–168. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | RAW | OWT [8] | OHHT [9] | HSA-KS [10] | MAF-ARIMA | Jumping Type |
|---|---|---|---|---|---|---|
| 1 | 19.72 | 4.65 | 9.00 | 14.48 | 3.34 | Endpoint |
| 2 | 20.91 | 5.39 | 6.23 | 15.34 | 3.52 | Middle |
| 3 | 15.96 | 8.68 | 11.45 | 12.73 | 7.93 | Middle |
| 4 | 14.53 | 6.77 | 7.36 | 13.75 | 4.14 | Middle |
| 5 | 21.28 | 11.73 | 13.54 | 19.49 | 8.11 | Endpoint |
| 6 | 25.57 | 16.12 | 17.45 | 22.95 | 10.62 | Endpoint |
| 7 | 11.75 | 4.72 | 4.51 | 11.32 | 3.94 | Middle |
| 8 | 18.20 | 5.31 | 14.50 | 15.40 | 4.18 | Endpoint |
| 9 | 14.29 | 3.85 | 6.28 | 13.95 | 2.35 | Endpoint |
| 10 | 22.69 | 6.38 | 14.10 | 21.96 | 6.26 | Middle |
| Mean | 18.49 | 7.36 | 10.44 | 16.14 | 5.44 | / |
| Improve | / | 60.19% | 43.53% | 12.73% | 70.58% | / |
| Group | RAW | OWT [8] | OHHT [9] | HSA-KS [10] | MAF-ARIMA | Jumping Type |
|---|---|---|---|---|---|---|
| 1 | 6.64 | 6.10 | 4.87 | 5.32 | 3.97 | Endpoint |
| 2 | 8.43 | 7.57 | 7.30 | 6.34 | 5.29 | Middle |
| 3 | 6.31 | 6.33 | 6.16 | 7.63 | 2.99 | Middle |
| 4 | 3.38 | 2.56 | 3.31 | 2.11 | 2.35 | Middle |
| 5 | 7.20 | 6.77 | 6.61 | 1.01 | 2.87 | Endpoint |
| 6 | 10.04 | 9.88 | 9.67 | 6.96 | 4.67 | Endpoint |
| 7 | 7.74 | 7.45 | 7.19 | 6.89 | 5.01 | Middle |
| 8 | 9.88 | 9.15 | 8.57 | 7.41 | 3.53 | Endpoint |
| 9 | 4.69 | 3.83 | 4.69 | 2.08 | 2.54 | Endpoint |
| 10 | 7.17 | 5.48 | 5.83 | 6.60 | 4.44 | Middle |
| Mean | 7.15 | 6.51 | 6.42 | 5.24 | 3.77 | / |
| Improve | / | 8.90% | 10.18% | 26.76% | 47.31% | / |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Shi, Z.; Zou, C.; Yang, Z.; Li, J. A Novel Method for Noise Reduction and Jump Correction of Maglev Gyroscope Rotor Signals Under Instantaneous Perturbations. Sensors 2025, 25, 2131. https://doi.org/10.3390/s25072131
Liu D, Shi Z, Zou C, Yang Z, Li J. A Novel Method for Noise Reduction and Jump Correction of Maglev Gyroscope Rotor Signals Under Instantaneous Perturbations. Sensors. 2025; 25(7):2131. https://doi.org/10.3390/s25072131
Chicago/Turabian StyleLiu, Di, Zhen Shi, Chenxi Zou, Ziyi Yang, and Jifan Li. 2025. "A Novel Method for Noise Reduction and Jump Correction of Maglev Gyroscope Rotor Signals Under Instantaneous Perturbations" Sensors 25, no. 7: 2131. https://doi.org/10.3390/s25072131
APA StyleLiu, D., Shi, Z., Zou, C., Yang, Z., & Li, J. (2025). A Novel Method for Noise Reduction and Jump Correction of Maglev Gyroscope Rotor Signals Under Instantaneous Perturbations. Sensors, 25(7), 2131. https://doi.org/10.3390/s25072131