
Research on the Acoustic Scattering Characteristics of Underwater Corner Reflector Linear Arrays

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Calculation Methods for the Acoustic Scattering of Underwater Targets
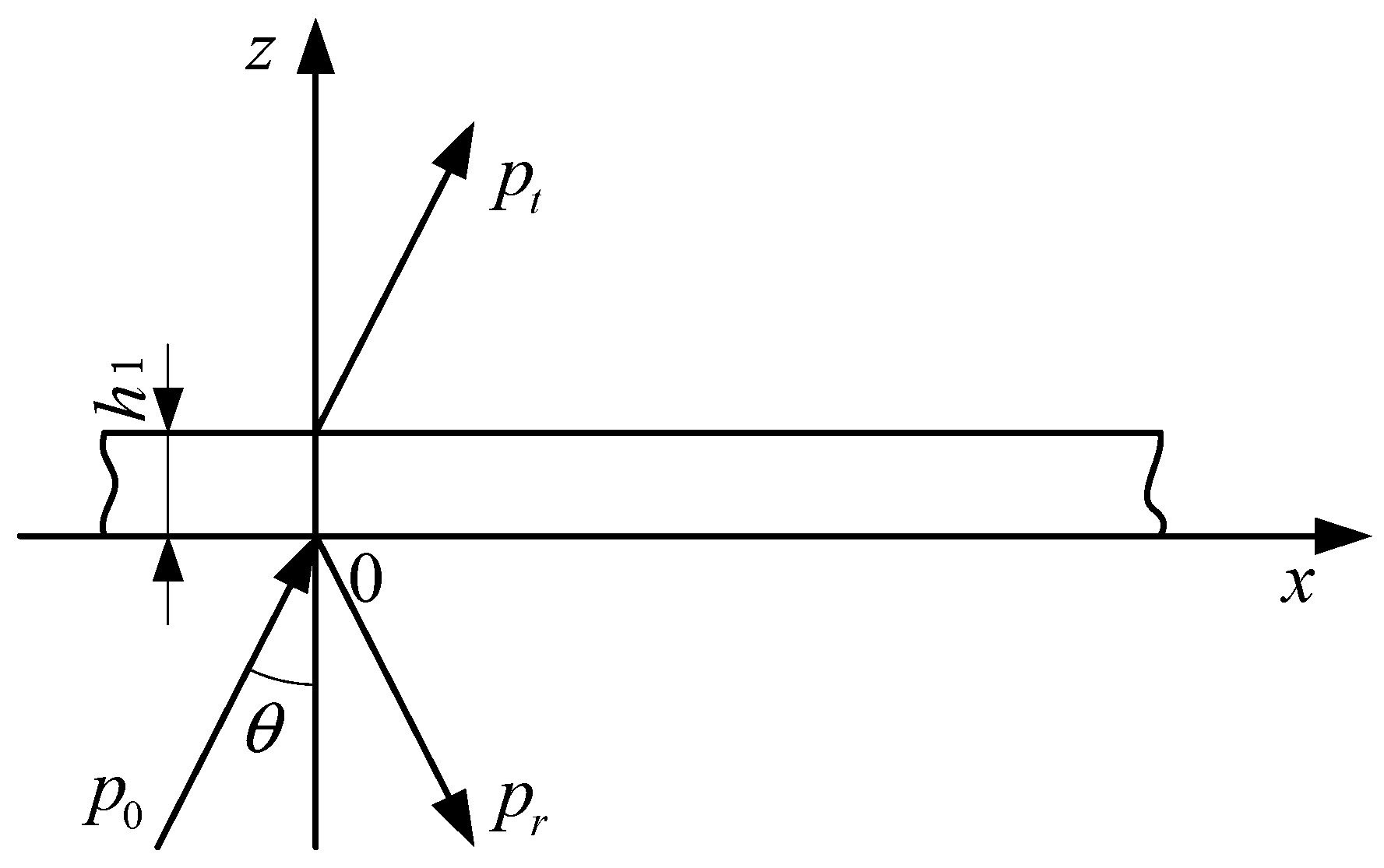
2.1. The Acoustic Reflection Properties of Metal Thin Plates
2.2. Anti-Acoustic Performance of the Air Layer
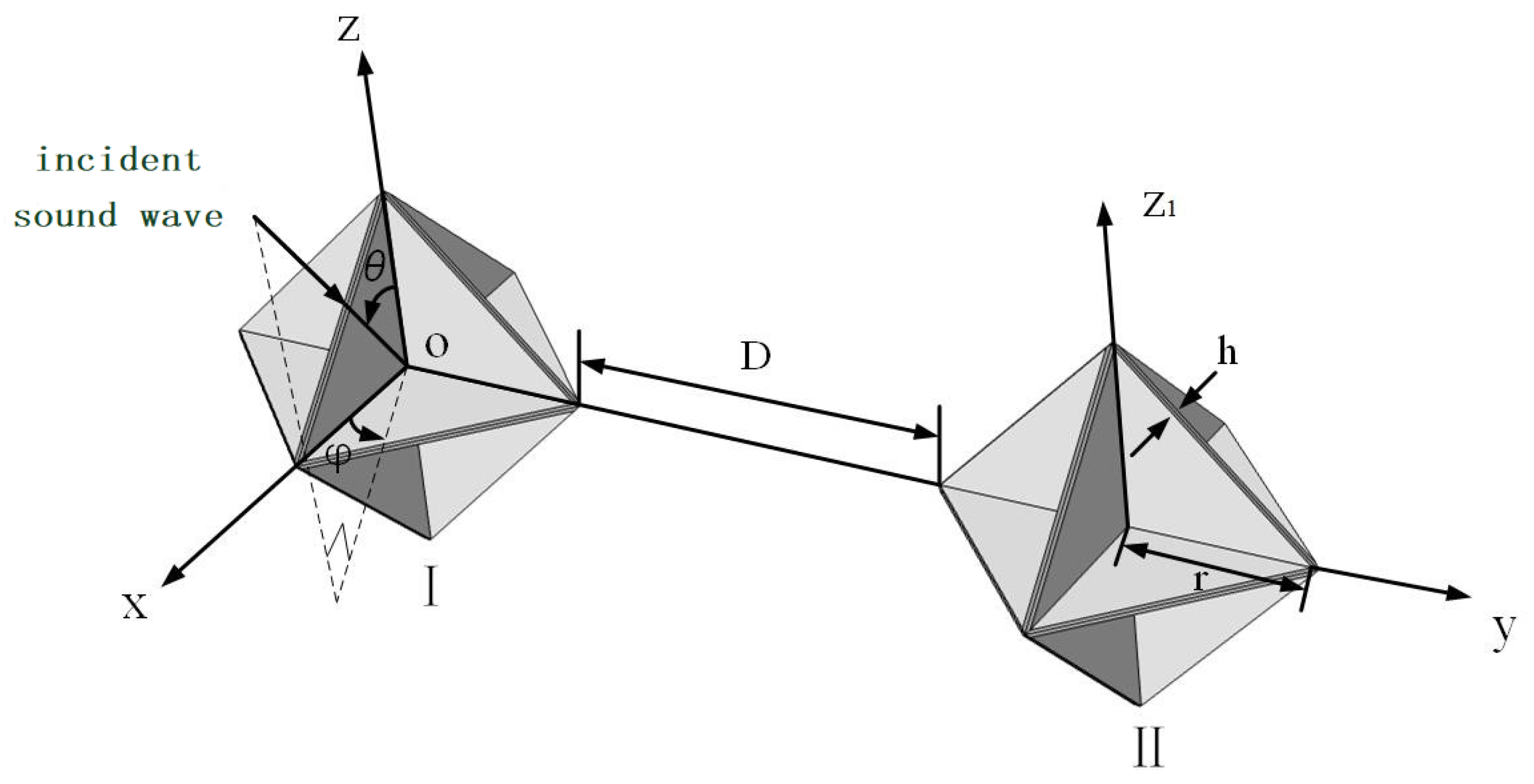
2.3. Calculation Methods for Acoustic Scattering by Underwater Corner Reflectors
3. Simulation-Based Computation
3.1. A Parallel Arrangement Where the Components Are Set at the Same Angle
- (1)
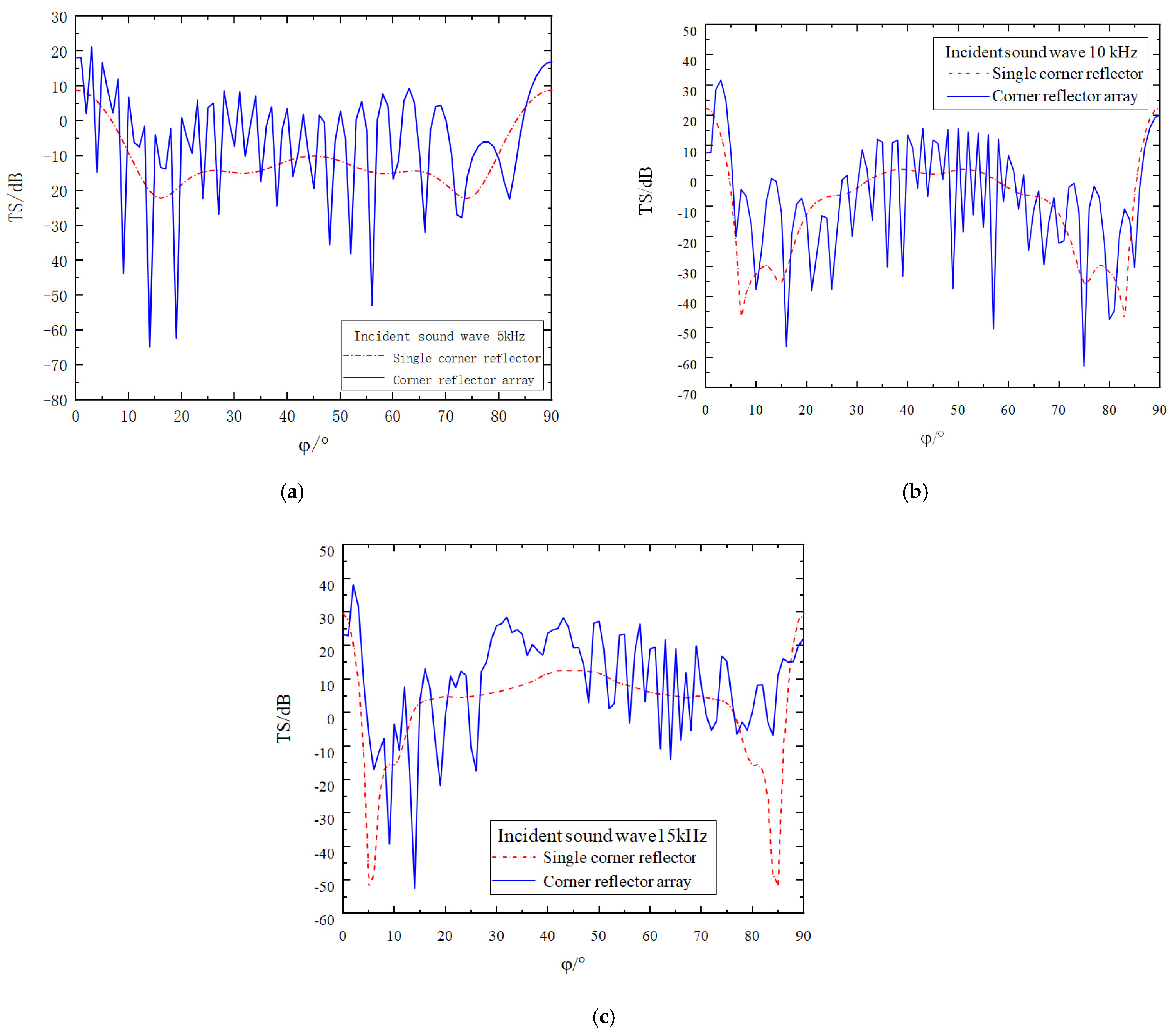
- Owing to the interaction between two corner reflectors and the presence of a gap between them, the fluctuation characteristics of the target strength curve are significantly enhanced. The overall trend shows an up and down fluctuation around the target strength curve of the single corner reflector. As the incident frequency increases, the fluctuation of the target strength curve becomes more pronounced, while the amplitude of the fluctuation gradually decreases. At incident frequencies of 5 kHz, 10 kHz, and 15 kHz, the amplitudes of the fluctuations are approximately 60 dB, 40 dB, and 25 dB, respectively.
- (2)
- As the number of corner reflectors increases, the relative cross-sectional area of the reflecting surface correspondingly expands, resulting in a significant increase in the target strength. By calculating the target strength at each sampling point, it is found that when the frequency of the incident acoustic wave is 5 kHz, the target strengths of the single corner reflector and the corner reflector array are −10.9 dB and −8.2 dB, respectively. At 10 kHz, the target strengths are −9.3 dB and −6.3 dB, respectively, and at 15 kHz, the target strengths are 2.1 dB and 4.4 dB, respectively.
- (3)
- When the incident angle is changed, the variation trends of the target strengths of the corner reflector array and the single corner reflector are basically consistent. In the directions of 0° and 90°, due to specular reflection, the target strengths are relatively large, reaching 22 dB, 28 dB, and 40 dB, respectively. Around 5° and 85°, the target strengths are relatively small, being −54 dB, −40 dB, and −32 dB, respectively, indicating the existence of reflection blind spots. Even when the corner reflector array is deployed, the reflection performance in this angular range cannot be effectively improved.
- (4)
- Since the linear array of corner reflectors contains multiple reflecting units, the incident acoustic wave causes each corner reflector to generate strong reflections. However, there is mutual influence among the corner reflectors, and complex scattering phenomena occur among them. Therefore, the scattered acoustic waves received at the field point are extremely complex. When the peaks and troughs of two acoustic waves meet, destructive interference occurs, causing the acoustic waves to cancel each other out. As a result, the scattered sound pressure at the field point decreases, leading to a reduction in the target strength. This is why, at certain incident angles, the target strength of the linear array of corner reflectors is lower than that of the single corner reflector.
- (1)
- There are significant differences in target strength between the array composed of two corner reflectors and the single corner reflector. Generally speaking, the target strength of the two-corner reflector array is higher than that of the single corner reflector.
- (2)
- As the deployment spacing between the corner reflectors increases, the degree of fluctuation in the target strength curve intensifies. Moreover, the amplitude of this fluctuation grows as the incident frequency rises. This is because an increase in frequency shortens the wavelength of the acoustic wave, resulting in a more concentrated distribution of acoustic waves within a unit space. This phenomenon is particularly prominent at incident frequencies of 5 kHz and 10 kHz.
- (3)
- Despite the changes in the fluctuation of the target strength curve, its variation pattern remains largely stable, still fluctuating around the target strength curve of a single corner reflector.
- (4)
- The target strength values of the corner reflectors generally remain constant. When the deployment distance is 5 r, by averaging the target strength values at each sampling point, the target strength values at the three incident frequencies are found to be −5.8 dB, −7.8 dB, and 8.7 dB, respectively. When the deployment distance is increased to 10 r, after averaging the target strength values at each sampling point, the target strength values at these three incident frequencies are −6.7 dB, −6.8 dB, and 9.3 dB, respectively.
3.2. The Corner Reflectors Are Precisely Configured with a Relative Rotation Angle of 45°
- (1)
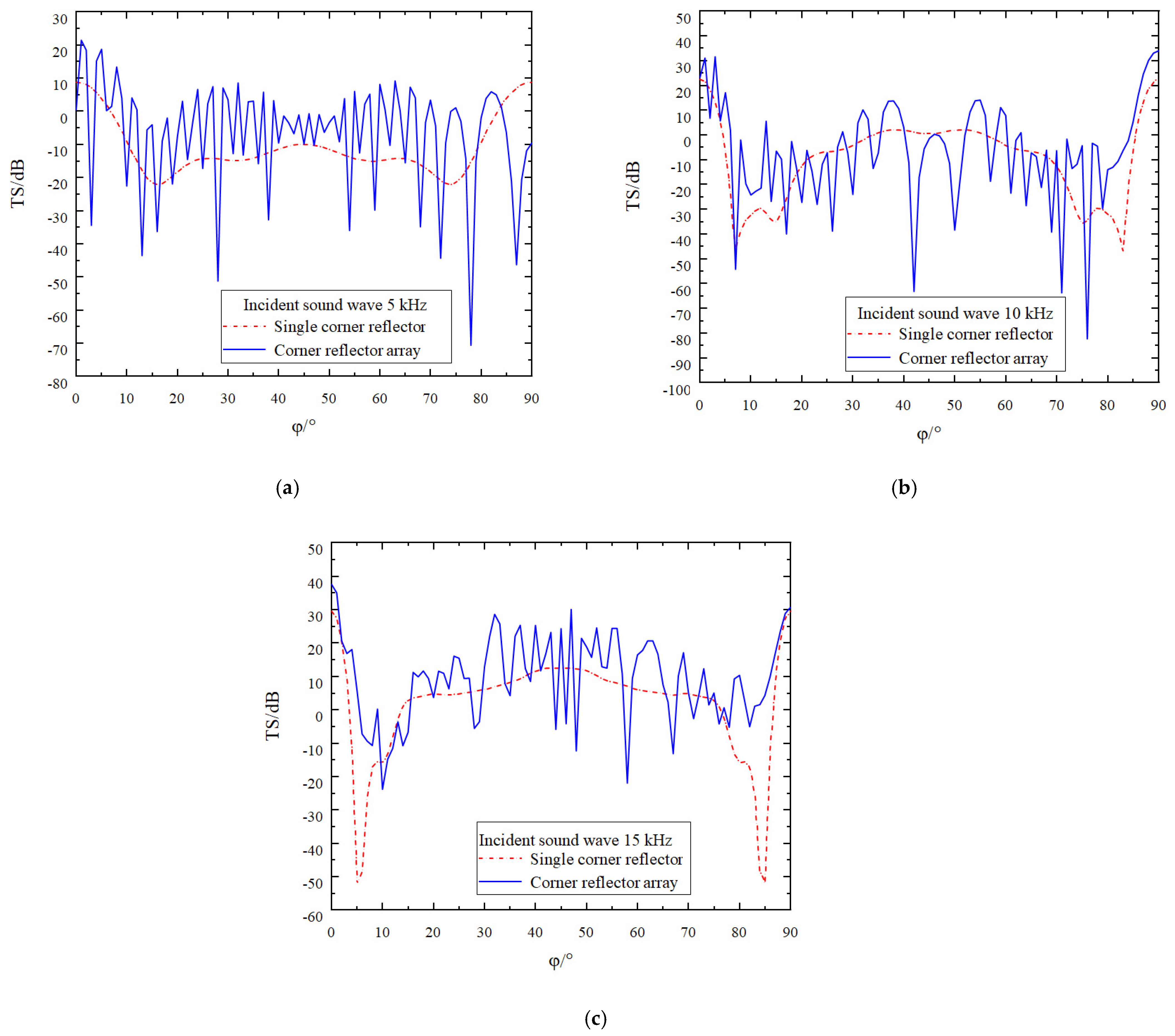
- When the corner reflector array is deployed under the current angular conditions, as the incident angle changes, the target strength curve exhibits significant fluctuations due to the interaction among multiple corner reflectors. Moreover, the number of peaks and valleys in the target strength curve increases as the incident frequency of the acoustic wave rises.
- (2)
- After calculating the target strength at each sampling point, it is found that when the incident acoustic-wave frequency is 5 kHz, the average target strength of the corner reflector array is −3.2 dB. At 10 kHz, the average target strength is −2.0 dB, and at 15 kHz, the target strength is 11.6 dB.
- (3)
- Compared with the deployment angle used in the previous section, rotating one of the corner reflectors in the corner reflector array brings about two positive effects. Firstly, it effectively addresses the issue of low target strength around 5° and 85°. Secondly, it significantly enhances the overall target strength of the corner reflector array.
- (1)
- As the deployment spacing between the corner reflectors increases, the gaps between them also widen, resulting in a more frequent occurrence of peaks and valleys in the target–strength curve. Moreover, the density of these peaks and valleys in the target strength curve further increases as the incident frequency rises.
- (2)
- Comparing the two deployment methods—namely the parallel deployment of two corner reflectors at the same angle and deployment with a relative rotation of 45°—at an incident frequency of 5 kHz, due to the relatively long wavelength of the acoustic wave, there is no significant difference in the improvement of the target strength between the two deployment methods. However, when the incident frequency reaches 10 kHz and 15 kHz, thanks to the reinforcement effect of Corner Reflector II, within the angular range around 5° and 85°, the deployment method with a relative rotation of 45° can increase the target strength by approximately 20–30 dB. This significantly reduces the reflection blind spots of the two-corner reflector array.
- (3)
- The target strength values of the corner reflectors generally remain relatively stable. When the deployment distance is 5r, by averaging the target strength values at each sampling point, the target strength values at the three incident frequencies are −2.2 dB, −3.5 dB, and 13.0 dB, respectively. When the deployment distance is 10r, after averaging the target strength values at each sampling point, the TS values at these three incident frequencies are −2.6 dB, −3.8 dB, and 12.6 dB, respectively.
4. Validation by Means of Pool Experiments
4.1. Systematic Design and Production of the Corner Reflector Model Along with the Corresponding Hoisting Device
4.2. Comprehensive Design for the Pool-Based Experiment
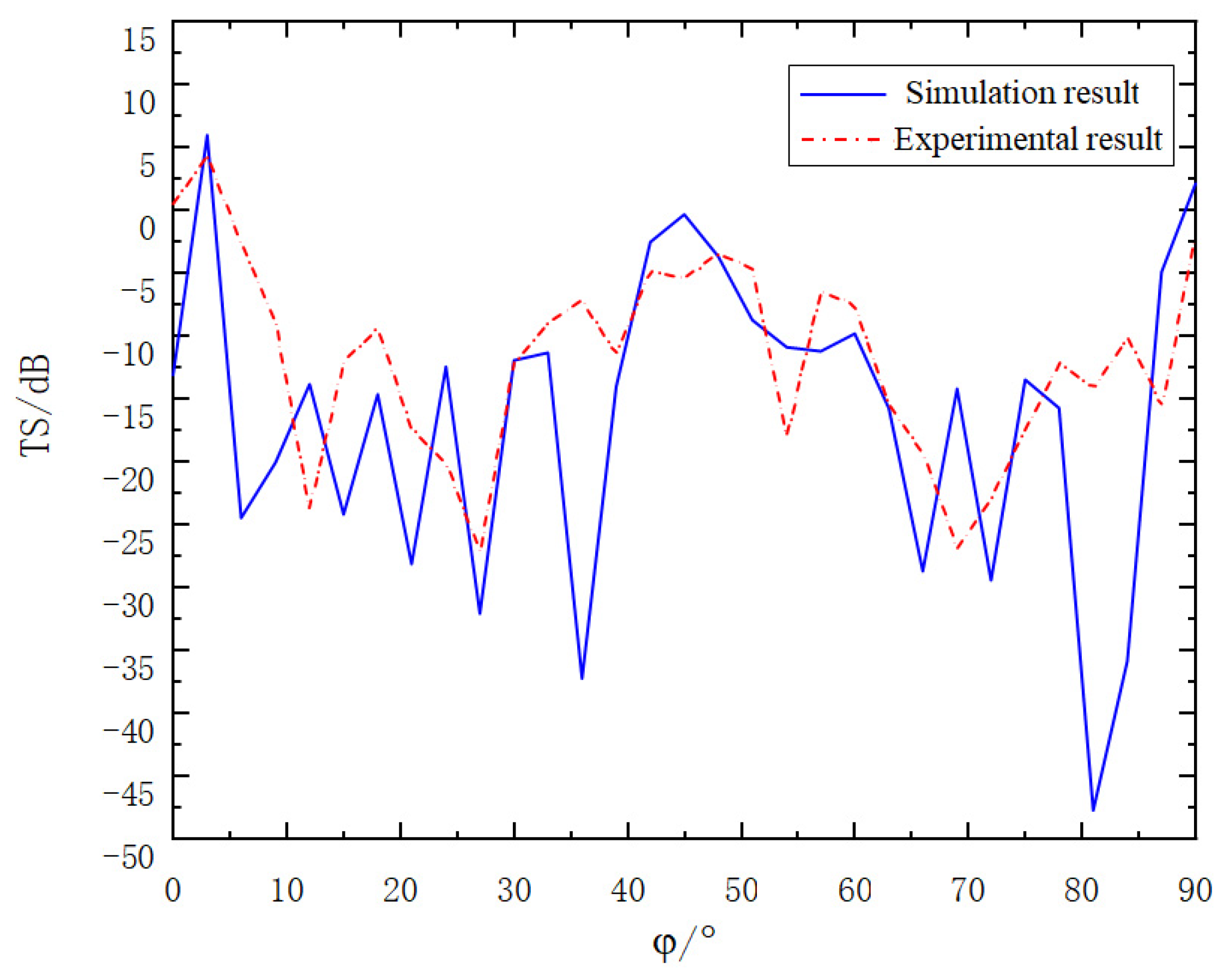
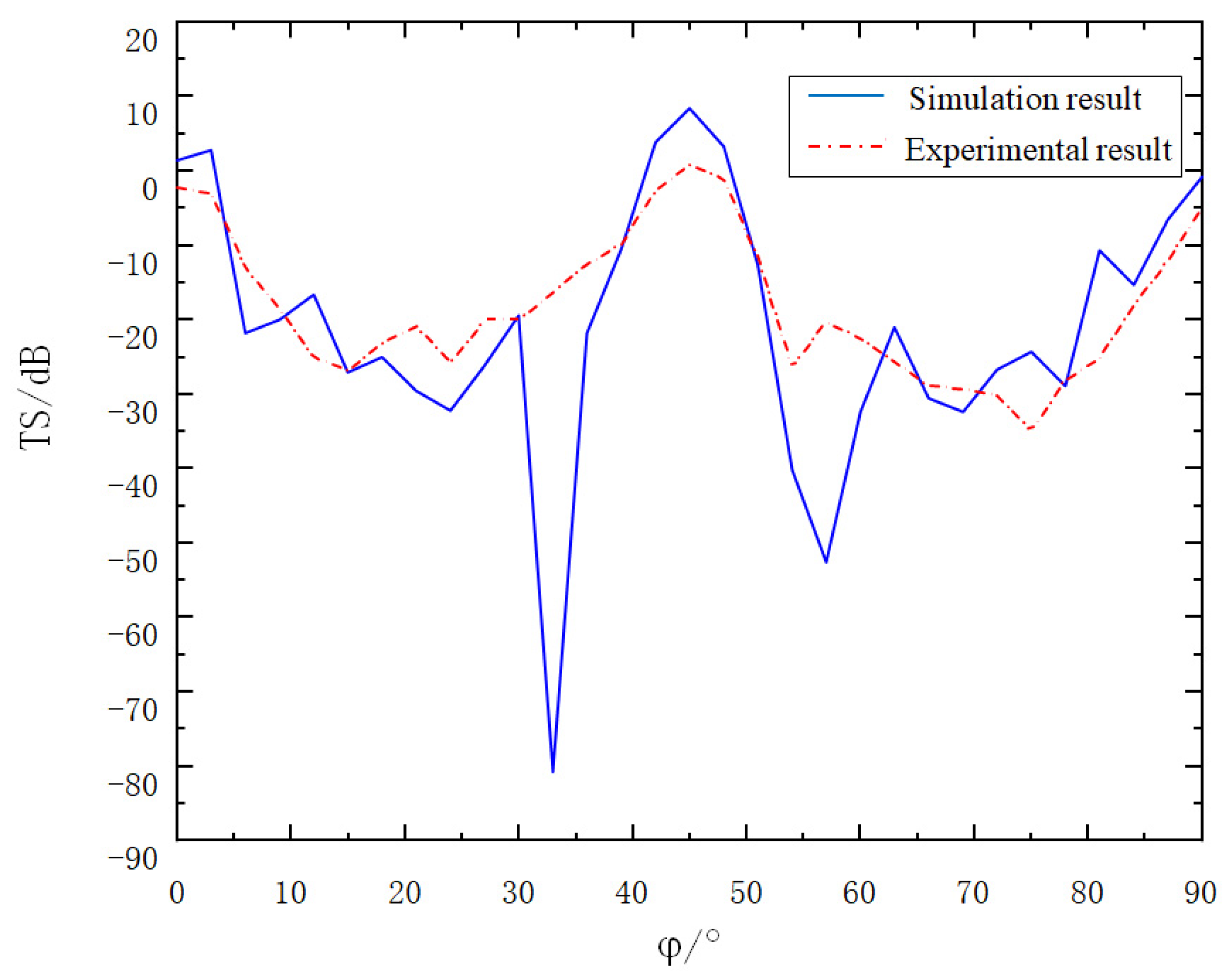
4.3. Experimental Data Collection and In-Depth Analysis
- (a)
- Compared with the single corner reflector, the corner reflector linear array can significantly enhance the overall target strength to a considerable extent. This indicates that the size of the target reflection area has a great influence on the target strength value.
- (b)
- The corner reflector linear array can also effectively optimize the problem of the low target strength of the single corner reflector at around 20° and 70°. This optimization effect is more prominent when the corner reflectors are deployed with relative rotation. The reason is that when one corner reflector is at the blind angle, this is exactly the angular range where the reflection intensity of the other corner reflector is the largest.
- (c)
- Based on the above-mentioned advantages, in practical engineering applications, the deployment method of the relative rotation of corner reflectors can be considered to ensure that the target strength values in all directions meet the requirements of the target simulation.
4.4. Comprehensive Error Analysis
- (1)
- The processing technology of the eight-cell corner reflector is relatively complex. There are manufacturing errors in the perpendicularity of the flat plates of each reflecting surface. This causes the angle of the acoustic wave reflection to change, and the wave fails to return to the field point.
- (2)
- The reflecting surface plates of the corner reflector are composed of “thin steel plate–air–thin steel plate”. The reinforcing ribs, welded to enhance pressure resistance, affect the scattering of acoustic waves. The acoustic waves will undergo multiple refractions in the reinforcing ribs, resulting in a certain amount of acoustic wave loss.
- (3)
- The reinforcing ribs cannot completely prevent the corner reflector from deforming under water pressure. Therefore, during underwater tests, the flat plates of the corner reflector will be depressed inward due to water pressure, causing a deviation in the reflection direction of the reflected wave.
- (4)
- The acoustic centers of the transmitting transducer, hydrophone, and corner reflector deployed in the experiment are not in a straight line, resulting in alignment errors. As a result, the received signal cannot be guaranteed to come from the geometric center of the target.
- (5)
- Due to site limitations, for non-anechoic pools, there are interfering factors such as pool-wall reverberation.
5. Conclusions
- (1)
- With the increase in the number of corner reflectors in the linear array, the overall target strength is significantly enhanced. The target strength of the two-corner reflector array is approximately 5 dB greater than that of the single corner reflector, mainly due to the superposition contribution of the scattered acoustic waves of multiple reflecting units at the field point.
- (2)
- The scattered acoustic waves of the metal-plate corner reflectors in the linear array will interact with each other, causing the target strength curve to fluctuate violently. The number of fluctuation peaks and valleys increases with the increase in the number of corner reflectors.
- (3)
- The fluctuation amplitude of the target strength curve decreases with the increase in incident frequency. The fluctuation amplitude is the largest when the incident frequency is 5 kHz and the smallest when it is 15 kHz.
- (4)
- By reasonably setting the deployment angles of each corner reflector and complementing the angles with strong reflection ability and those with weak reflection ability, the problems of low target strength and the existence of reflection blind areas of corner reflectors at around 5° and 85° can be optimized.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liao, W.J.; Hou, Y.C.; Tsai, C.C.; Hsieh, T.H.; Hsieh, H.J. Radar Cross Section Enhancing Structures for Automotive Radars. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 418–421. [Google Scholar] [CrossRef]
- Ratni, B.; de Lustrac, A.; Piau, G.-P.; Burokur, S.N. Active metasurface for reconfigurable reflectors. Appl. Phys. A 2018, 124, 104. [Google Scholar] [CrossRef]
- Zhu, Y.G.; Ai, X.; Wang, W.D. Design method of new reconfigurable radar corner reflector with multiple electromagnetic characteristics. Chin. J. Radio Sci. 2023, 38, 1015–1021+1056. (In Chinese) [Google Scholar] [CrossRef]
- Gan, L.; Sun, G.; Feng, D.; Li, J. Characteristics of an Eight-Quadrant Corner Reflector Involving a Reconfigurable Active Metasurface. Sensors 2022, 22, 4715. [Google Scholar] [CrossRef] [PubMed]
- Ferrer, P.J.; Lopez-Martinez, C.; Aguasca, A.; Pipia, L.; Gonzalez-Arbesu, J.M.; Fabregas, X.; Romeu, J. Transpolarizing Trihedral Corner Reflector Characterization Using a GB-SAR System. IEEE Geosci. Remote Sens. Lett. 2011, 8, 774–778. [Google Scholar] [CrossRef]
- Hu, H.; Zhang, L.; Zhang, X. A study on equipment developments and operational using of ship born gas-filled anti-missile multi-cornerreflector. Def. Technol. Rev. 2018, 39, 74–77. [Google Scholar]
- Zhang, Z.; Zhao, Y. Analysis of electromagnetic scattering characteristic for new type icosahedrons triangular trihedral corner reflectors. Command Control Simul. 2018, 40, 133–137. [Google Scholar]
- Li, H.; Chen, S.; Wang, X. Study on characterization of sea corner reflectors in polarimetric rotation domain. Syst. Eng. Electron. 2022, 44, 2065–2073. [Google Scholar]
- Zhao, F.; Qiu, M.Q.; Ai, X.F.; Xu, Z.M. Comparative Analysis of Monostatic and Bistatic RCS Characteristics for Typical Corner Reflectors. Mod. Def. Technol. 2023, 51, 50–58. [Google Scholar]
- Ke, X. Angular Reflector Return Intensity Characteristics. In Partially Coherent Optical Transmission Theory in Optical Wireless Communication. Optical Wireless Communication Theory and Technology; Springer: Singapore, 2025. [Google Scholar] [CrossRef]
- Xia, L.; Wang, F.; Pang, C.; Li, N.; Peng, R.; Song, Z.; Li, Y. An Identification Method of Corner Reflector Array Based on Mismatched Filter through Changing the Frequency Modulation Slope. Remote Sens. 2024, 16, 2114. (In Chinese) [Google Scholar] [CrossRef]
- Guo, T. RCS Computation of Towed Passive False Target. Master’s Thesis, Xidian University, Shanxi, China, 2019. (In Chinese). [Google Scholar] [CrossRef]
- Chen, W.J. Research on Underwater Acoustic Corner Reflector Properties. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2012. (In Chinese). [Google Scholar]
- Liang, J.J.; Yu, Y.; Chen, W.J.; Hu, S.W.; Wang, H.; Wang, Y.Z. A modified shooting and bouncing beams method for fast calculating the acoustic scattering field of circular trihedral corner reflector. Tech. Acoust. 2017, 36, 303–308. (In Chinese) [Google Scholar] [CrossRef]
- Chen, W.J.; Sun, H. Study on the acoustic backscattering characteristics of underwater corner reflector. J. Inf. Comput. Sci. 2015, 12, 1–7. [Google Scholar] [CrossRef]
- Avdeev, I.S. The use of the boundary element method in solving the problems of sound scattering by an elastic noncircular cylinder. Acoust. Phys. 2010, 56, 407–411. [Google Scholar] [CrossRef]
- Lin, L.; Lv, J.; Li, S. An adaptive finite element DtN method for the acoustic-elastic interaction problem. Adv. Comput. Math. 2024, 50, 67. [Google Scholar] [CrossRef]
- Zhao, X.F.; Cui, H.C.; Dong, R. Simulation Experiments of Lamb Wave’s Scattering Sound Field on Underwater Elastic Plate. Digit. Ocean Underw. Warf. 2019, 2, 31–37. (In Chinese) [Google Scholar]
- Luo, Y.; Chen, X. Acoustic Scattering Characteristics of Underwater Air-filled Cavity Corner Reflector. Acta Armamentarii 2019, 40, 2129–2135. (In Chinese) [Google Scholar]
- Luo, Y.; Wang, J.Y.; Xie, T.T. A Foam Interlayer Method for Improving on the Acoustic Reflection Capability of Underwater Corner Reflector. Acta Armamentarii 2020, 41, 2081–2087. (In Chinese) [Google Scholar]
- Xie, T.T.; Luo, Y.; Xiao, D.W. Analysis of Acoustic Scattering Characteristics of Underwater Non Orthogonal Acoustic Corner Reflectors. J. Underw. Unmanned Syst. 2022, 30, 94–101. (In Chinese) [Google Scholar]
- Wang, X.F.; Meng, H.R.; Yu, F.X. Research on Information Modeling Technology of Underwater Large Structures Based on FEM and BEM. In Proceedings of the 18th Symposium on Underwater Noise of Ships Dalian Institute of Measurement and Control Technology, Kunming, China, 29 September 2021. (In Chinese). [Google Scholar] [CrossRef]
- Hu, H.W.; Wang, Z.W.; Xu, Y.M.; Chen, L.L. A study on the isogeometric finite element-boundary element method for the stochastic analysis of structural acoustic coupling. J. Vib. Shock 2022, 41, 159–167. (In Chinese) [Google Scholar]
- Feng, J.L.; Wang, H.H.; Zhao, Y.; Wang, Y.N.; Du, L.G. Finite Element-Boundary Element Method Simulation for Acoustic-Vibration Problems of Spacecraft Structures. Equip. Environ. Eng. 2018, 15, 37–43. (In Chinese) [Google Scholar]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, D.; Zhang, J.; Chu, Z.; Luo, Y. Research on the Acoustic Scattering Characteristics of Underwater Corner Reflector Linear Arrays. Sensors 2025, 25, 2129. https://doi.org/10.3390/s25072129
Xiao D, Zhang J, Chu Z, Luo Y. Research on the Acoustic Scattering Characteristics of Underwater Corner Reflector Linear Arrays. Sensors. 2025; 25(7):2129. https://doi.org/10.3390/s25072129
Chicago/Turabian StyleXiao, Dawei, Jingzhuo Zhang, Zichao Chu, and Yi Luo. 2025. "Research on the Acoustic Scattering Characteristics of Underwater Corner Reflector Linear Arrays" Sensors 25, no. 7: 2129. https://doi.org/10.3390/s25072129
APA StyleXiao, D., Zhang, J., Chu, Z., & Luo, Y. (2025). Research on the Acoustic Scattering Characteristics of Underwater Corner Reflector Linear Arrays. Sensors, 25(7), 2129. https://doi.org/10.3390/s25072129