1. Introduction
With the rapid advancement of intelligent driving technologies for electric vehicles, environmental perception technology has increasingly gained traction. Currently, this field of research is recognized as a pivotal topic in the realm of intelligent driving [
1]. Environmental perception encompasses the collection, processing, and analysis of information concerning both the driving environment and the vehicles themselves [
2,
3]. It serves as a vital foundation and prerequisite for the autonomous operation of smart electric vehicles. Consequently, enhancing the environmental awareness of intelligent driving systems is essential for improving their understanding of the vehicle’s operational context and its surroundings [
4]. This complex research area has attracted considerable attention and sparked dynamic discussions among researchers worldwide. Environmental perception technology is advancing rapidly, and ongoing research and applications in this field will have significant and enduring implications [
5].
Multi-source information fusion technology for environmental perception has emerged as a prominent research area among scholars [
6]. The presence of numerous surrounding targets, high movement speeds, and significant randomness in driving environments often renders data collected from a single sensor inadequate to meet user requirements [
7]. Consequently, researchers have begun investigating the fusion of multi-sensor detection data to provide accurate positional information on targets. The effective integration of detection data from multiple sensors has become a major focus in the fields of multi-sensor information fusion and environmental perception. This area has increasingly evolved into an interdisciplinary field that commands significant interest [
8,
9]. Unlike systems that depend on a single sensor, multi-sensor configurations leverage the complementary strengths of various sensors, achieving a higher level of data acquisition accuracy than any individual sensor can provide [
10,
11]. Moreover, the integration of multi-source sensor data across different layers can enhance the understanding of autonomous driving scenarios in intelligent vehicles, thus facilitating their efficient and stable operation within these environments [
12].
A sensor fusion system represents an advanced information processing framework that facilitates real-time data collection from multiple sensors. These sensors possess both continuous and temporal characteristics, with interdependencies and influences among various types of information. Multi-source information fusion methods are critical to the domain of multi-sensor data fusion. Currently, these methods are classified into four primary categories: inference methods, classification methods, artificial intelligence methods, and filtering and estimation methods. Inference methods primarily rely on Dempster–Shafer (D-S) evidence theory, which effectively integrates information from multiple sensors using a distinctive evidence combination rule. This theory is extensively applied in scenarios involving uncertainty and ambiguity [
13]. The widely utilized K-means algorithm in classification methods is effective for data clustering, as it groups similar samples, reduces data dimensionality, and eliminates outliers that deviate from the majority of data points [
14]. Artificial intelligence methods predominantly rely on artificial neural networks for multisource information fusion, effectively integrating data from diverse sensors and extracting salient features [
15]. By processing data from various sensors, the network learns the interrelationships among them, thereby enabling information fusion and optimization. Filtering and estimation methods have emerged as the most extensively studied and applied techniques due to their robustness and suitability for dynamic and complex environments, with the Kalman filter (KF) algorithm being a notable example [
16].
The Kalman Filter (KF) algorithm is predicated on a linear dynamic model of the system [
17]. By utilizing iterative state predictions and measurement updates, it recursively produces the optimal estimate of the system’s state. However, the traditional Kalman Filter is limited to linear systems, which has led researchers to create the Extended Kalman Filter (EKF) to address this constraint [
18]. The EKF transforms nonlinear system equations into linear approximations through a first-order Taylor series expansion, using the current mean error and covariance. This approach effectively accommodates the nonlinear characteristics of the system. In contrast, the Unscented Kalman Filter (UKF) eliminates the need to linearize nonlinear systems [
19]. It adopts a strategy that selects a set of deterministic points and employs weighted averaging to compute state estimates, thereby enhancing estimation accuracy. To tackle the issue of time-varying parameters in state estimation and prediction for dynamic systems, an adaptive Kalman filtering algorithm has been developed. This algorithm dynamically adjusts the filter parameters based on observational data to improve estimation accuracy. Among these techniques, Sage-Husa adaptive Kalman filtering notably enhances state estimation accuracy by dynamically modifying the noise covariance matrix within the Kalman Filter [
20]. Zeyuan Luo et al. propose an AUKF based on a modified Sage-Husa filter and divergence calculation technique for multi-dimensional vehicle driving state observation. To mitigate the impact of transient disturbances on the subsequent process, the covariance matrix is updated upon detecting divergence [
21]. Bai et al. propose an improved adaptive Unscented Kalman filter. This algorithm incorporates an adaptive mechanism that allows it to automatically adjust filtering parameters in response to environmental changes. As a result, it maintains a high level of positioning accuracy even in conditions of poor channel quality or significant variations in noise levels [
22]. Dapeng Wang et al. proposed an adaptive robust UKF to address the multi-sensor fusion problem in nonlinear stochastic systems. Local filters were designed based on the covariance of redundant measurement noise isolated by state estimation, while Mahalanobis distance hypothesis testing theory was used to adaptively adjust the process noise covariance in real time, utilizing the innovation sequence and residual sequence [
23].
Sensor performance is affected by variations in the driving environment, which can result in deviations in noise covariance. An inability to promptly and accurately estimate the measurement noise covariance may lead to inaccuracies in the residuals, subsequently diminishing the estimation accuracy in subsequent iterations. Liang Ma proposes an adaptive extended Kalman filter based on variational Bayesian and Sage-Husa prediction algorithms. This algorithm can adaptively modify the present motion model and uncertain measurement variance caused by stochastic ocean environmental noise [
24]. Xinxin Yan proposes a novel Sage-Husa adaptive robust strong tracking Kalman filter by combining the Sage-Husa adaptive robust KF with the strong tracking KF. The modified Sage-Husa adaptive robust–STKF algorithm not only effectively filters random noise but also shows an excellent suppression of outliers [
25]. Hongjian Jiao proposes enhanced modifications to the Sage-Husa Adaptive Kalman Filter (SHAKF) algorithm to address suboptimal observation weight distribution, introducing dual gross error detection and innovation-based adaptive correction of the forgetting factor in the iterative Kalman framework, thereby improving estimation accuracy and robustness [
26].
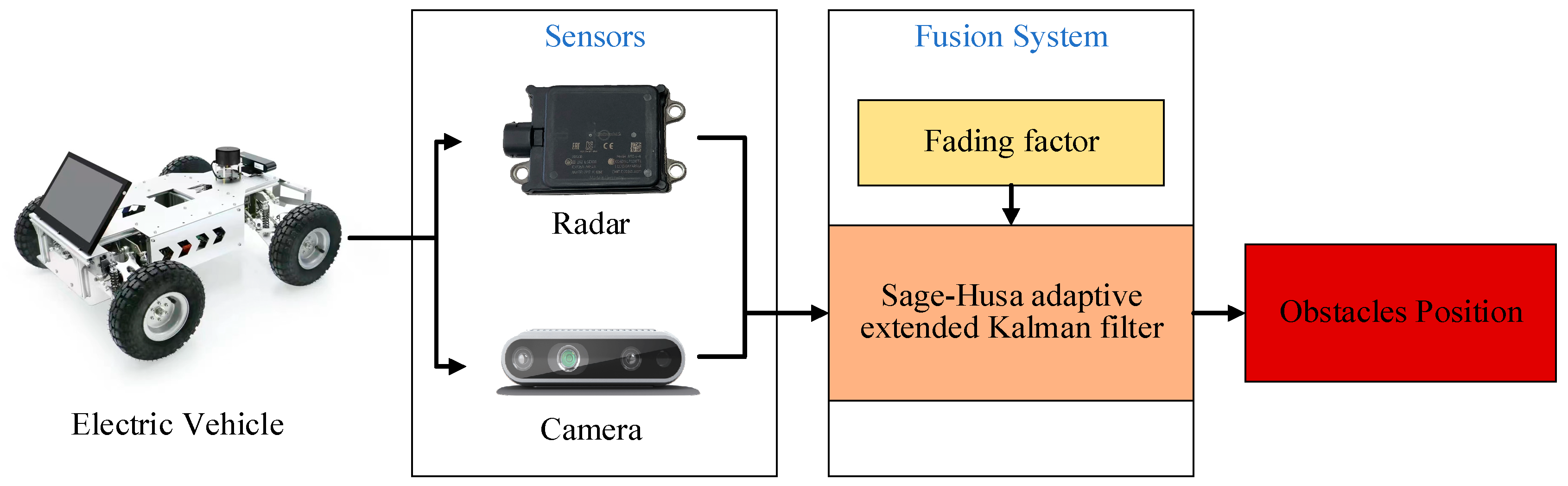
This paper presents a multi-source information fusion system based on the Sage-Husa adaptive extended Kalman filtering algorithm. First, a sensor measurement model is developed based on the dynamic model of intelligent vehicles, leading to the establishment of a multi-sensor information fusion system. Then, a fading factor is incorporated into the Sage-Husa adaptive extended Kalman filtering algorithm, effectively reducing estimation errors while also mitigating the risk of filter divergence. Finally, a mobile robot is employed in a laboratory setting to simulate the perception scenarios of intelligent vehicles, enabling the verification of the fusion system’s accuracy and the effectiveness of the algorithms.
The major contributions of this paper are as follows:
A multi-sensor information fusion method is proposed to address the information offset issue of single sensors.
An improved SHAEKF algorithm is proposed, which introduces a fading factor to reduce estimation errors and suppress the possibility of filter divergence.
Experimental results indicate that the proposed method significantly improves obstacle detection accuracy, thereby enhancing the driving safety of intelligent vehicles.
The remainder of this paper is organized as follows.
Section 2 establishes the dynamics model for electric vehicles.
Section 3 proposes the multi-source information fusion system based on SHAFEKF, including the sensor system: SHAFEKF-based multi-source information fusion.
Section 4 presents and analyzes the experimental results.
Section 5 provides a summary of the paper and outlines directions for future research.
2. Electric Vehicle Dynamics Model
Intelligent vehicles signify a substantial enhancement in contemporary transportation technology. These vehicles combine multiple sensors, information processing algorithms, and dynamic motion models to facilitate autonomous navigation and decision-making within complex traffic environments, thus improving both safety and efficiency. The effective performance of intelligent driving vehicles depends on the precise modeling of their motion dynamics to accurately represent their operational status in real time within changing environments. In the examination of vehicle motion models, they are generally classified into two categories: first-order models and second-order models. First-order motion models, commonly known as linear motion models, primarily encompass the Constant Velocity (CV) model and the Constant Acceleration (CA) model. These linear models simplify the vehicle’s motion process by assuming that the vehicle travels exclusively in a straight line; however, they fail to adequately capture the complex dynamics associated with steering maneuvers. This simplification may result in inaccuracies regarding the vehicle’s actual motion performance, particularly in scenarios that necessitate steering control. In contrast, second-order motion models offer a more sophisticated and precise approach to describing vehicle motion. These models include the Constant Turn Rate and Velocity (CTRV) model and the Constant Turn Rate and Acceleration (CTRA) model. Compared to first-order models, second-order models comprehensively account for the motion characteristics of intelligent electric vehicles, particularly when their travel path necessitates steering. These vehicles often experience variations in measurement data and time intervals from different sensors, requiring motion models to be flexible enough to adapt to dynamic performance under varying conditions. In light of the aforementioned factors, this paper identifies the CTRV model as the most appropriate motion model for intelligent electric vehicles. The selection of this model not only provides a more accurate representation of the vehicle’s motion state but also establishes a theoretical foundation for implementing advanced intelligent driving systems, thereby enhancing adaptability and reliability in practical applications. This is crucial for advancing the deployment of intelligent electric vehicles in real-world road environments [
27].
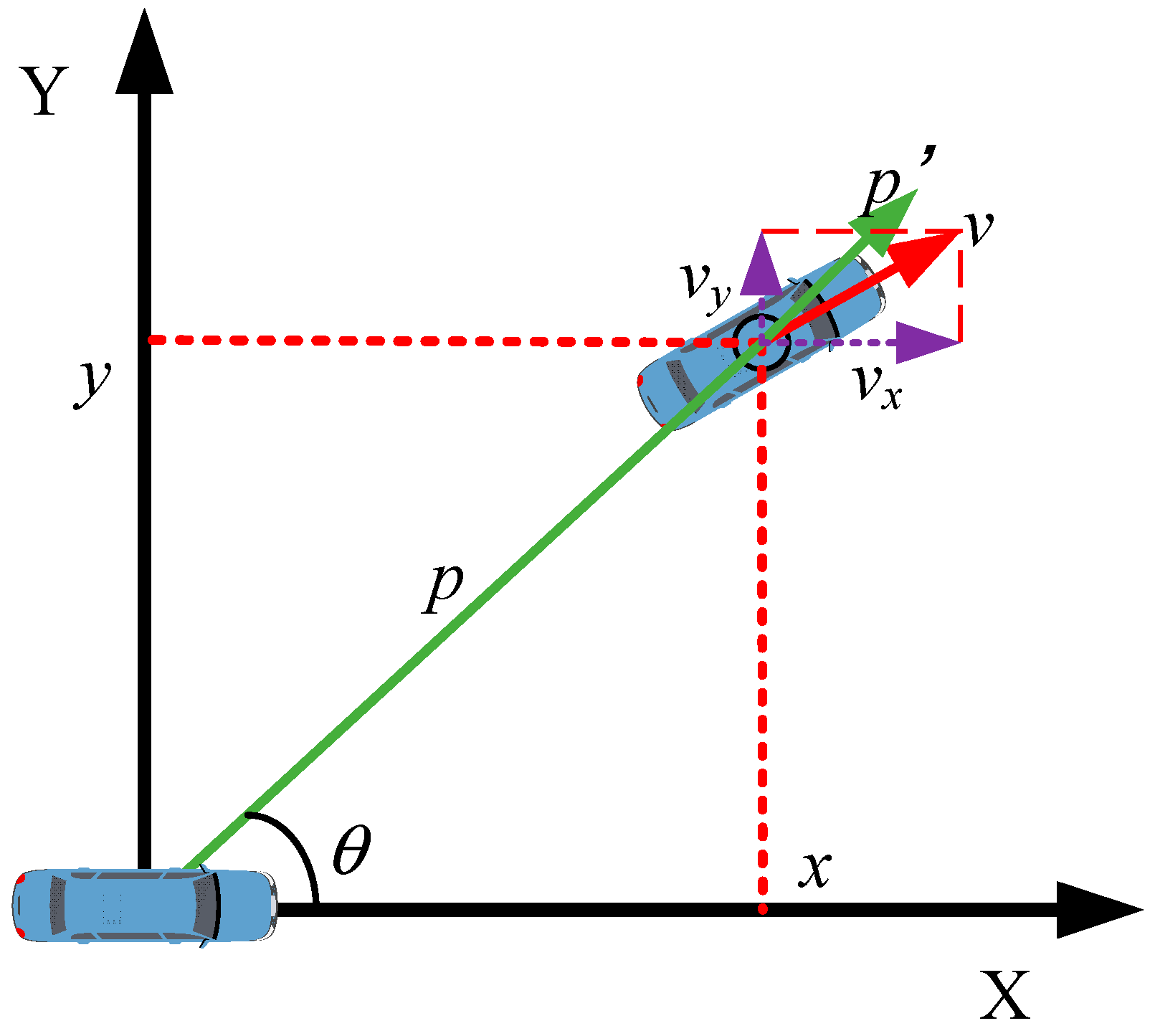
When the vehicle is in motion, the key real-time state variables related to its tracking target include
where
x and
y are the target position,
v is the target radial velocity,
θ is the yaw angle, and
is the yaw rate. Thus, the state transition function of the CTRV model is as follows:
Since this state transition function is nonlinear, it needs to be linearized, which involves calculating the corresponding Jacobian matrix. In the CTRV model, the partial derivatives of each element can be used to obtain the corresponding state Jacobian matrix.
4. Experimental Results
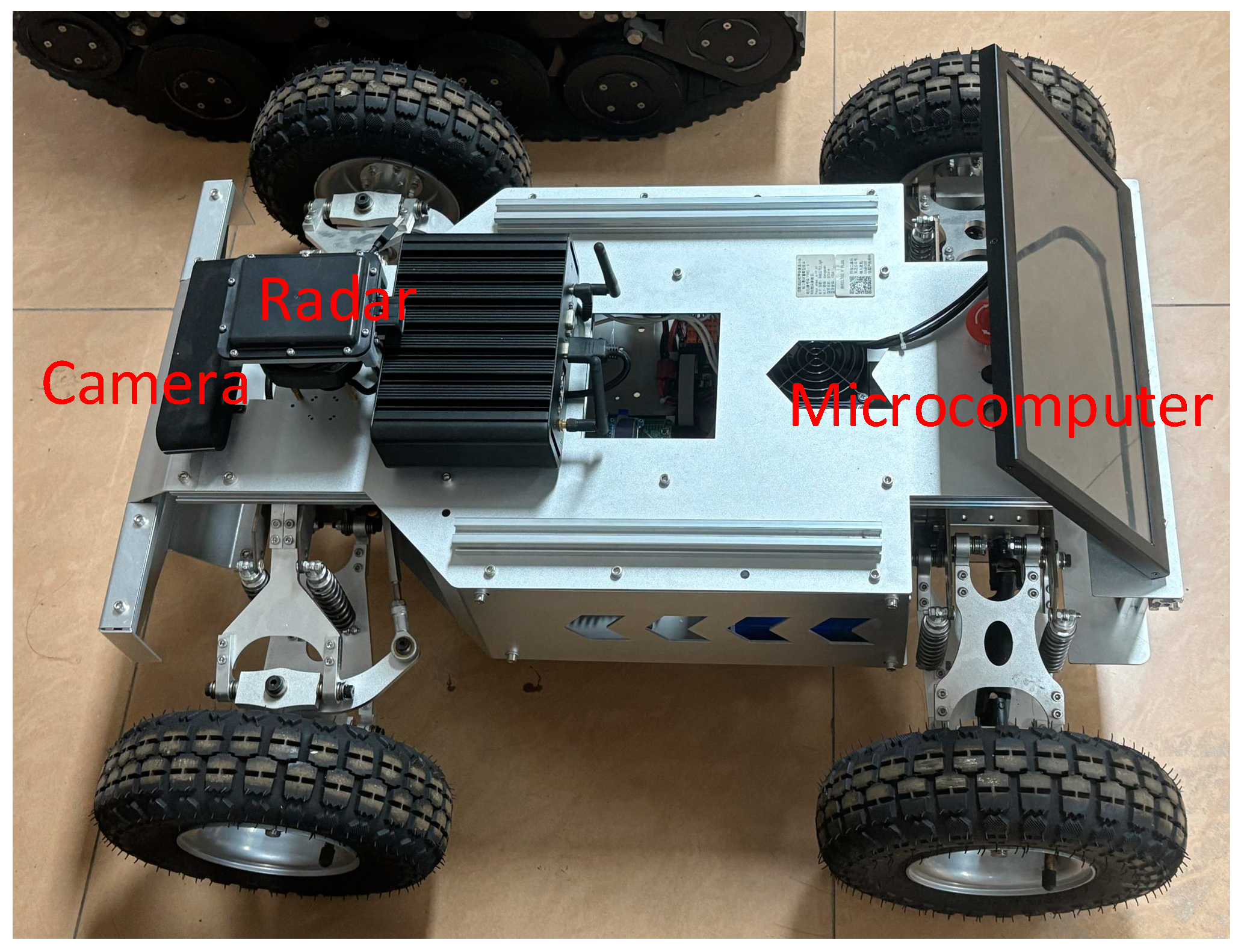
The method proposed in this paper is validated through a mobile robot that simulates an intelligent vehicle. This mobile robot is based on Ackermann steering geometry, which exhibits good maneuverability and performs well in indoor environments, as shown in
Figure 3.
In addition to the connecting hardware, the robot is composed of a microcomputer, motors, servos, and sensors. The microcomputer is used to collect and process sensor data. The following microcomputer setup was used during the experimental: ubuntu 20.4, ARM Cortex-A72 CPU, Jetson Nano 4 GB GPU. The sensors include a camera and radar. The camera is a stereo depth camera capable of achieving a frame rate of 100 FPS, with a depth range of 0.3 to 15 m. The frequency band of the millimeter-wave radar is 77 GHz, with a maximum detection range of up to 300 m. The experiments were conducted in a laboratory environment, where one mobile robot acted as the host vehicle for obstacle detection, while another mobile robot served as a dynamic obstacle. This paper employs the Euclidean distance between two points on a two-dimensional plane as a measure of positional error.
When the host vehicle is stationary, the dynamic obstacle moves in a straight line from 5 m to 10 m, as illustrated in
Figure 4.
Figure 4a indicates that the relative positioning error of the raw data captured by the camera is substantial, whereas the data fused using the SHAFEKF or SHAEKF algorithms exhibit a reduced relative position error. Moreover,
Figure 4b reveals that the maximum detection error of the camera is 0.35 m. The SHAEKF algorithm has a maximum error of 0.22 m, while the SHAFEKF algorithm achieves a maximum error of 0.18 m, demonstrating the least fluctuation in error.
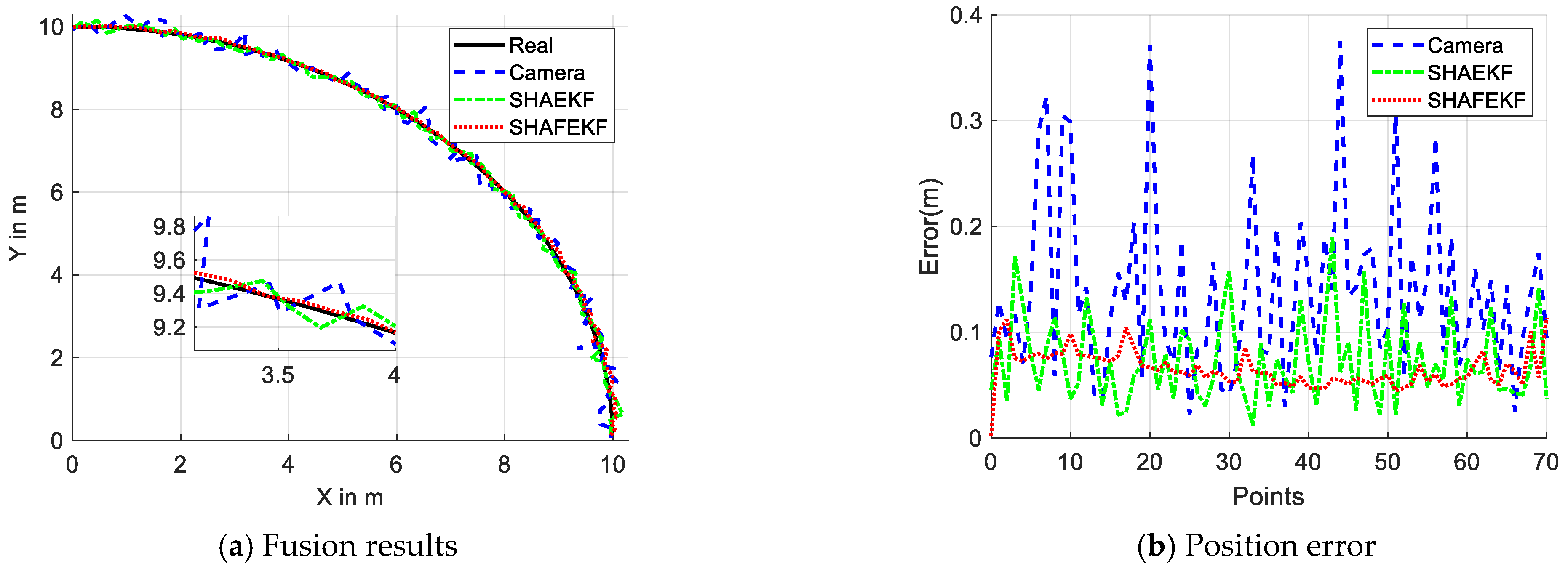
When the host vehicle is stationary, the dynamic obstacle moves at a constant speed along an arc at a distance of 10 m, as illustrated in
Figure 5.
Figure 5a indicates that the relative position error of the data fused using the proposed SHAFEKF algorithm is relatively small. Additionally,
Figure 5b reveals that the maximum detection error of the camera is 0.39 m. The maximum error of the SHAEKF algorithm is 0.19 m, whereas the SHAFEKF algorithm achieves a maximum error of 0.11 m.
To better validate the feasibility of the proposed algorithm, ten repeated experiments were conducted under identical experimental conditions.
Table 1 presents the average error (AE) and mean squared error (MSE) for the camera, SHAEKF algorithm, and SHAFEKF algorithm. The data indicate that both the SHAEKF and SHAFEKF algorithms significantly improve positional accuracy while simultaneously reducing data volatility. Furthermore, the average error for the SHAFEKF algorithm decreased by 2.8% and 13.4% in comparison to the SHAEKF algorithm across the two scenarios, while the mean squared error decreased by 64% and 72%. These findings demonstrate that the SHAFEKF algorithm offers advantages of enhanced accuracy and reduced fluctuation, thus providing greater adaptability in multi-source information fusion systems.
5. Discussion
With the advancement of intelligent driving technologies, multi-sensor fusion has emerged as the predominant development direction for next-generation environmental perception systems. By synergistically leveraging cameras’ high-resolution image processing capabilities and millimeter-wave radars’ precise velocity measurement characteristics, this approach achieves robust object detection under adverse conditions including low-light scenarios and inclement weather (e.g., rain/fog). It effectively compensates for inherent limitations of individual sensors in extreme weather or complex occlusion scenarios, such as optical interference affecting cameras and angular resolution constraints in radar systems.
The proposed SHAFEKF algorithm significantly enhances obstacle detection accuracy for intelligent electric vehicles during operation. This improvement enables the driving system to make faster decisions during emergency responses in complex traffic environments. Furthermore, the precision of obstacle detection directly impacts vehicular navigation and driving decisions, where high-accuracy detection better supports critical functions including path planning and dynamic obstacle avoidance. Through its fading memory exponential weighting filter estimator, the SHAFEKF algorithm enhances the utilization weight of newly acquired data. Although we have not yet tested under conditions such as rain, fog, or electromagnetic noise, we have observed that the sensors inherently introduce measurement noise. Our results indicate that SHAFEKF achieves a 15% improvement in measurement accuracy compared to traditional camera systems, demonstrating its adaptability to sensor degradation. This innovation achieves more reliable perception under adverse weather conditions with increased measurement noise (e.g., rain and fog), ensuring safe vehicle operation across diverse scenarios. The algorithm’s adaptive capability proves essential for realizing comprehensive intelligent driving, particularly in maintaining robust environmental awareness during sudden sensor degradation or transient interference events. In our future research, we will concentrate on exploring real vehicle scenarios across diverse environments to further validate our findings.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}