

Enhanced Readout System for Timepix3-Based Detectors in Large-Scale Scientific Facilities

 , , , ,
, , , ,  , , ,
, , ,
Abstract
1. Introduction
2. Timepix3 Readout ASIC
2.1. Main Features
2.2. Long-Distance Use
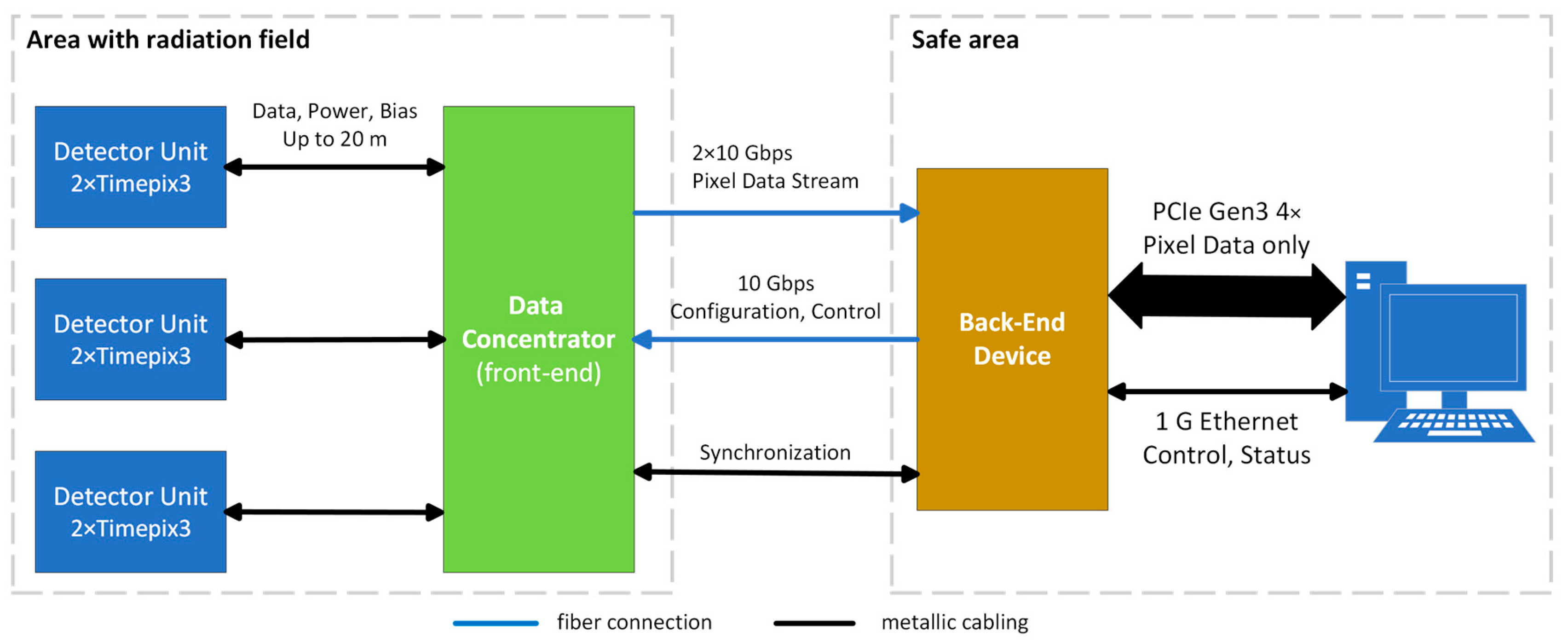
3. Proposed Concept
4. Implementation
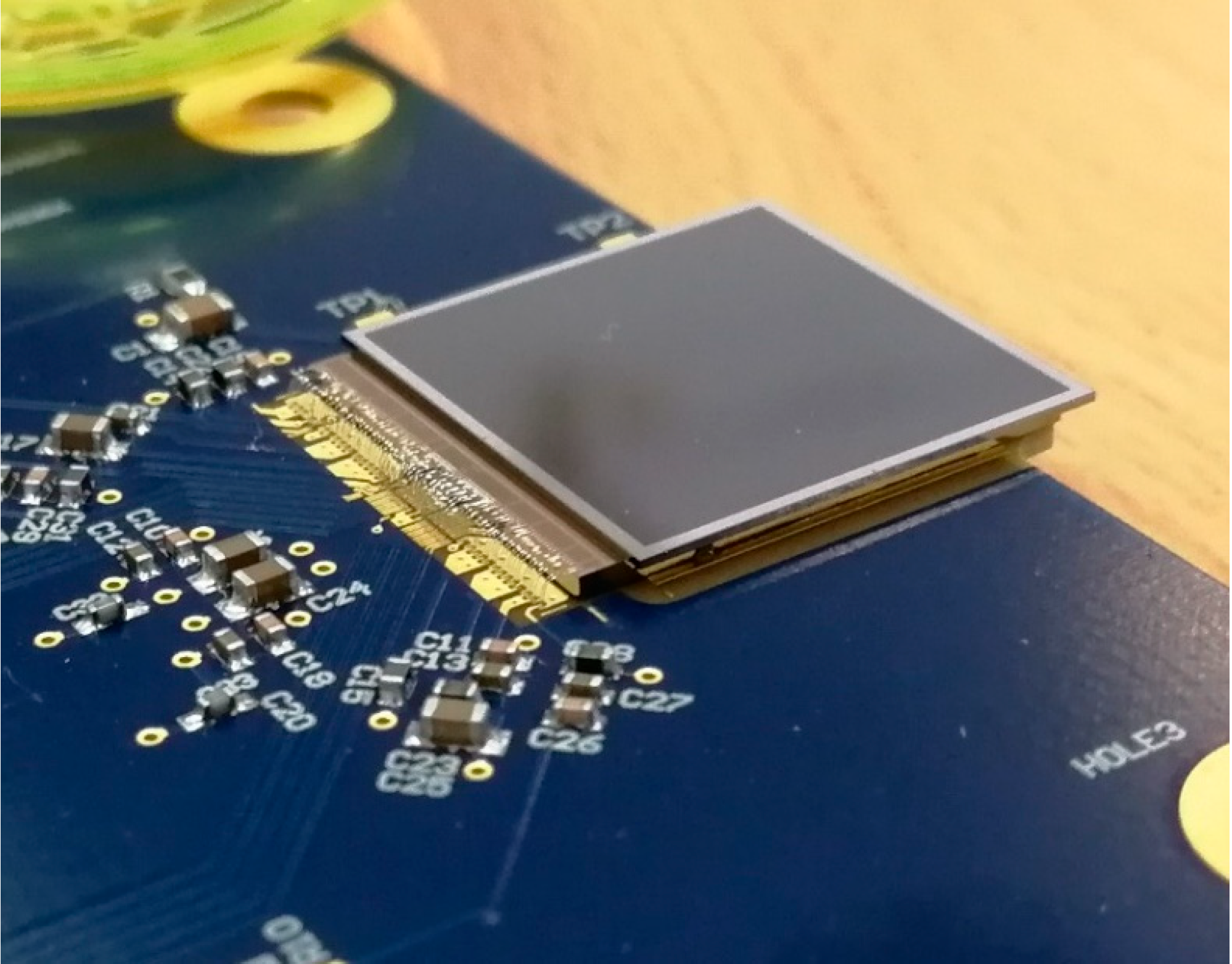
4.1. Detector Unit (Chipboard)
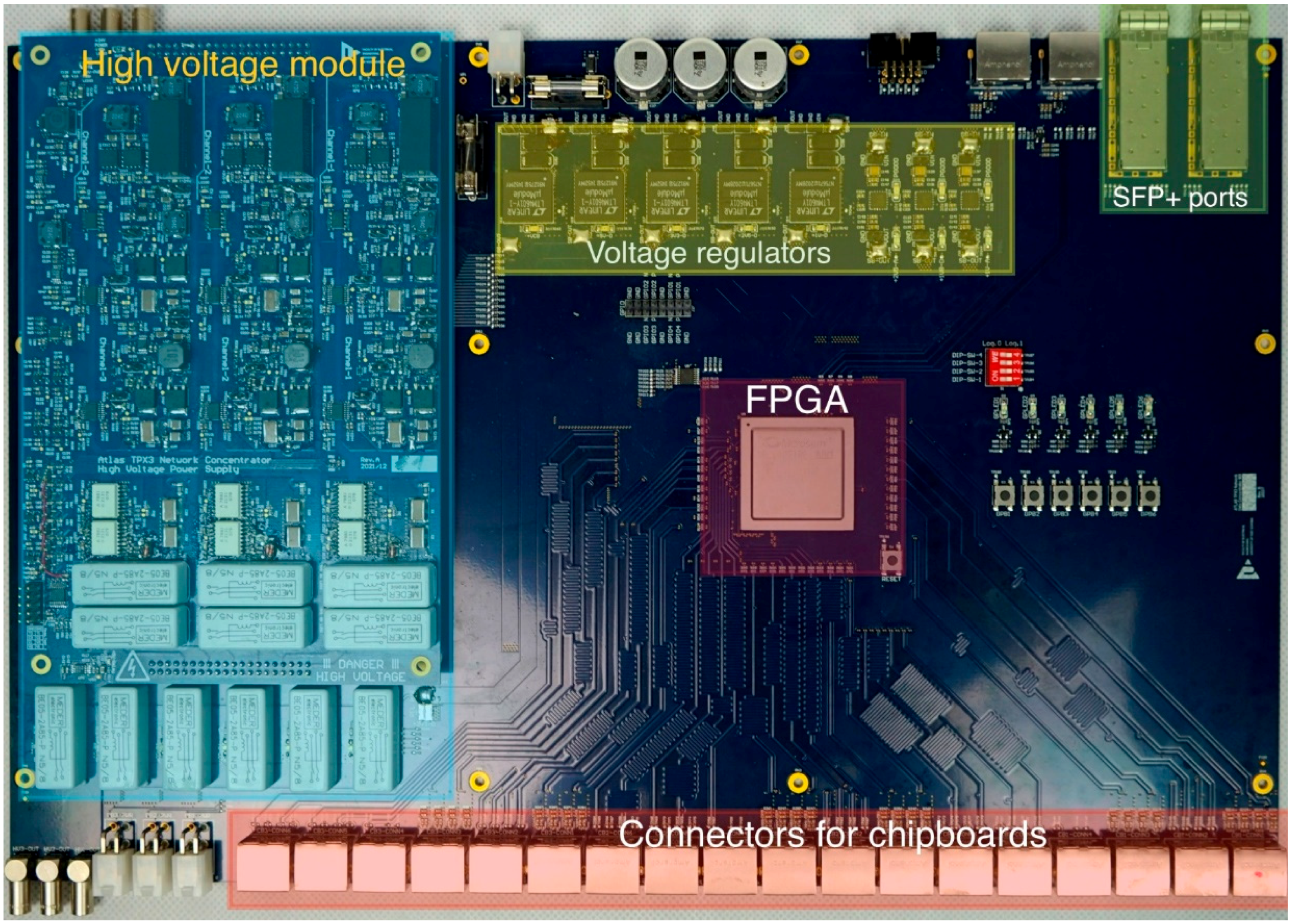
4.2. Data Concentrator (Front-End Device)
4.3. Back-End Device
4.4. Data Rate Limits
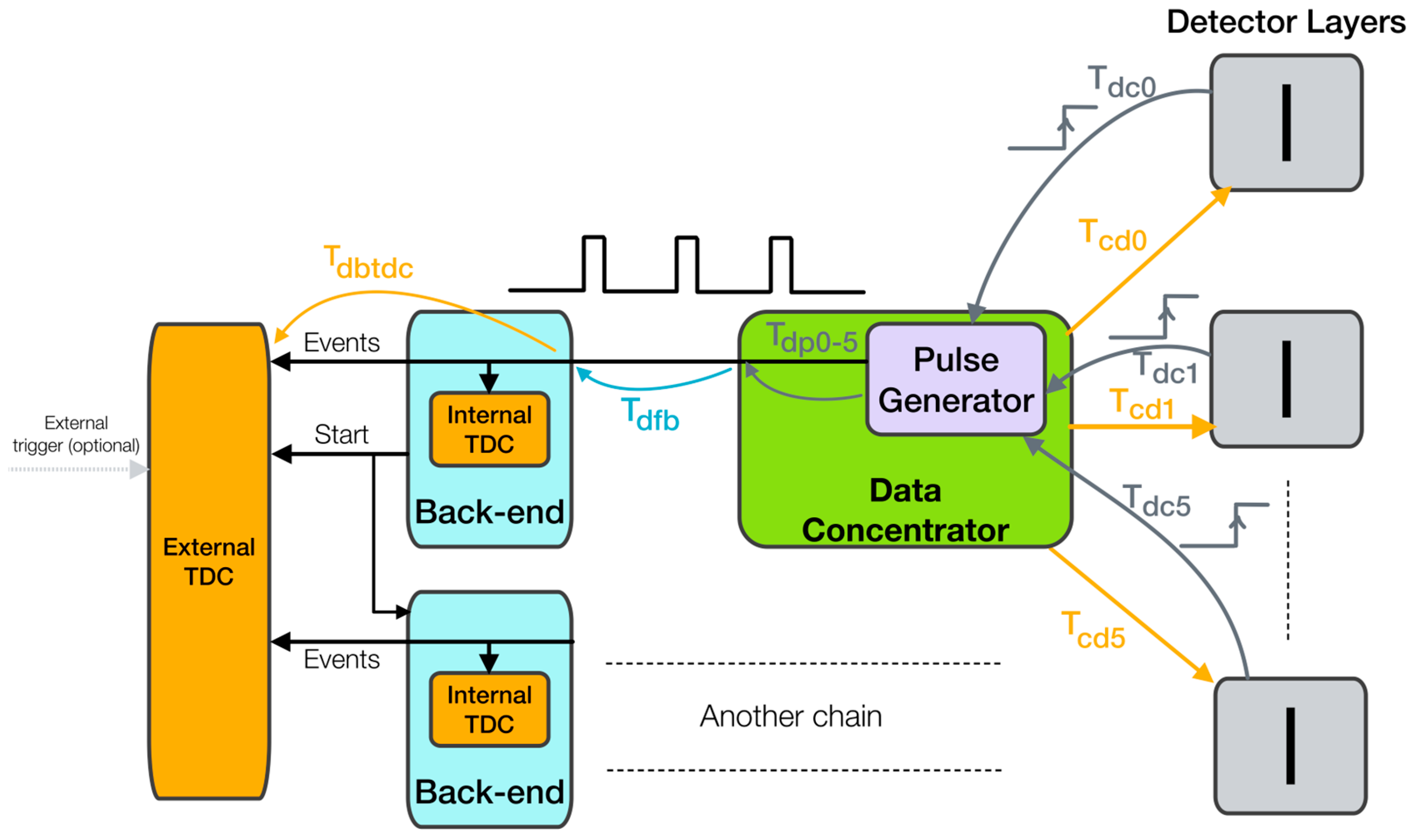
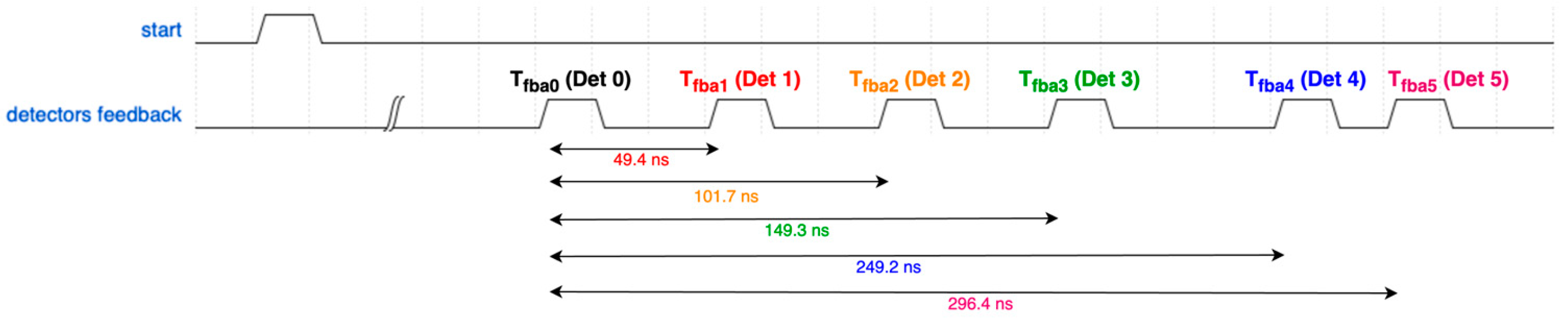
4.5. Synchronization
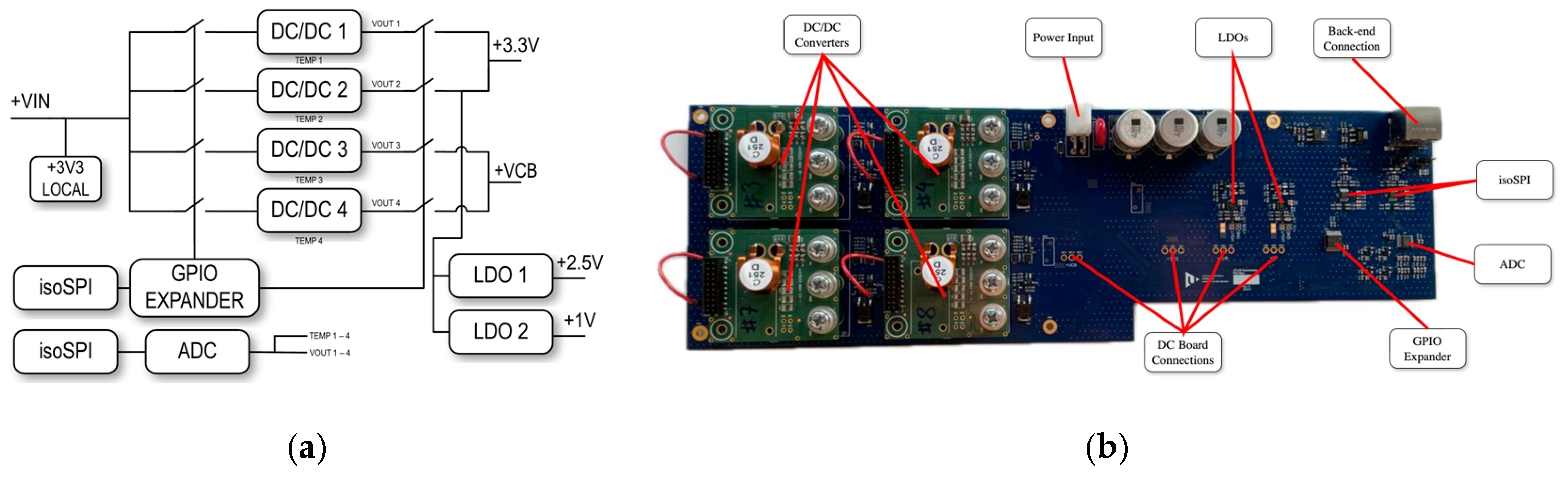
- Tdcn is total delay between the Timepix3 shutter register and the DC, n representing the layer index;
- Tss stands for the sampling uncertainty of the shutter signal by the matrix clock (40 MHz);
- Tcable represents the delay caused by the cable connecting Timepix3 and the DC (Ethernet cable), which is primarily determined by cable length and electrical parameters;
- Tpcb includes the signal delay on the PCB as well as internal delays within the Timepix3. In total, it encompasses the delay from the shutter register in the chip to the connector mounted on the chipboard PCB.
- Tnodeoffset is final shift (compensation) of the ToA values in the Timepix3 node;
- Tfba represents the time of detector feedback arrival at the DC;
- Tpd is the delay introduced by the Pulse Generator;
- Tdc is the total delay between the Timepix3 shutter register and the DC.
- Note: n refers to the detector feedback channel.
5. Results
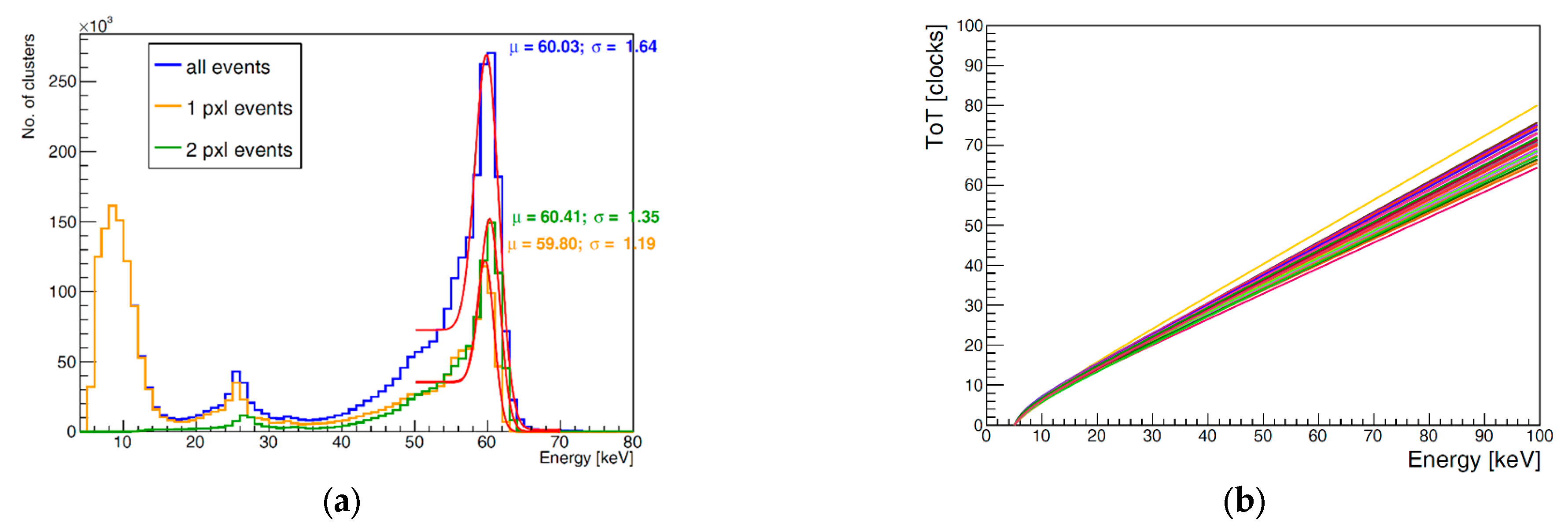
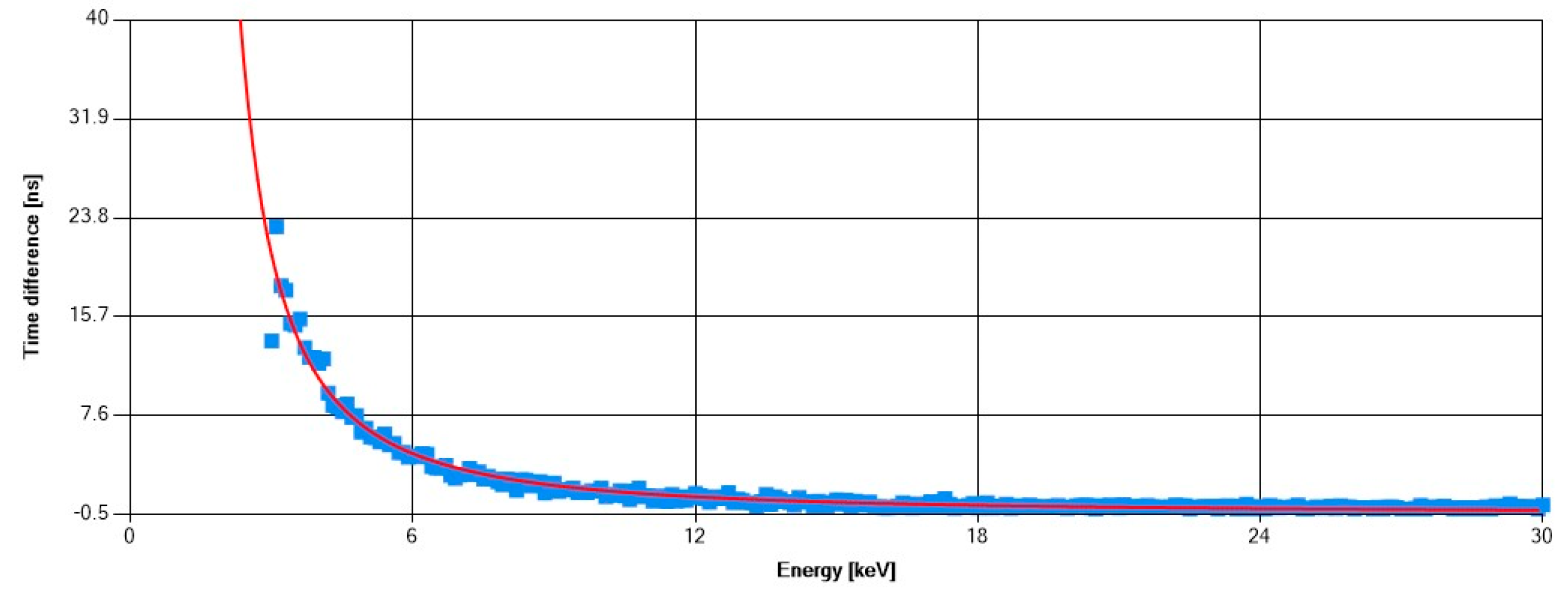
5.1. Laboratory Testing and Calibration
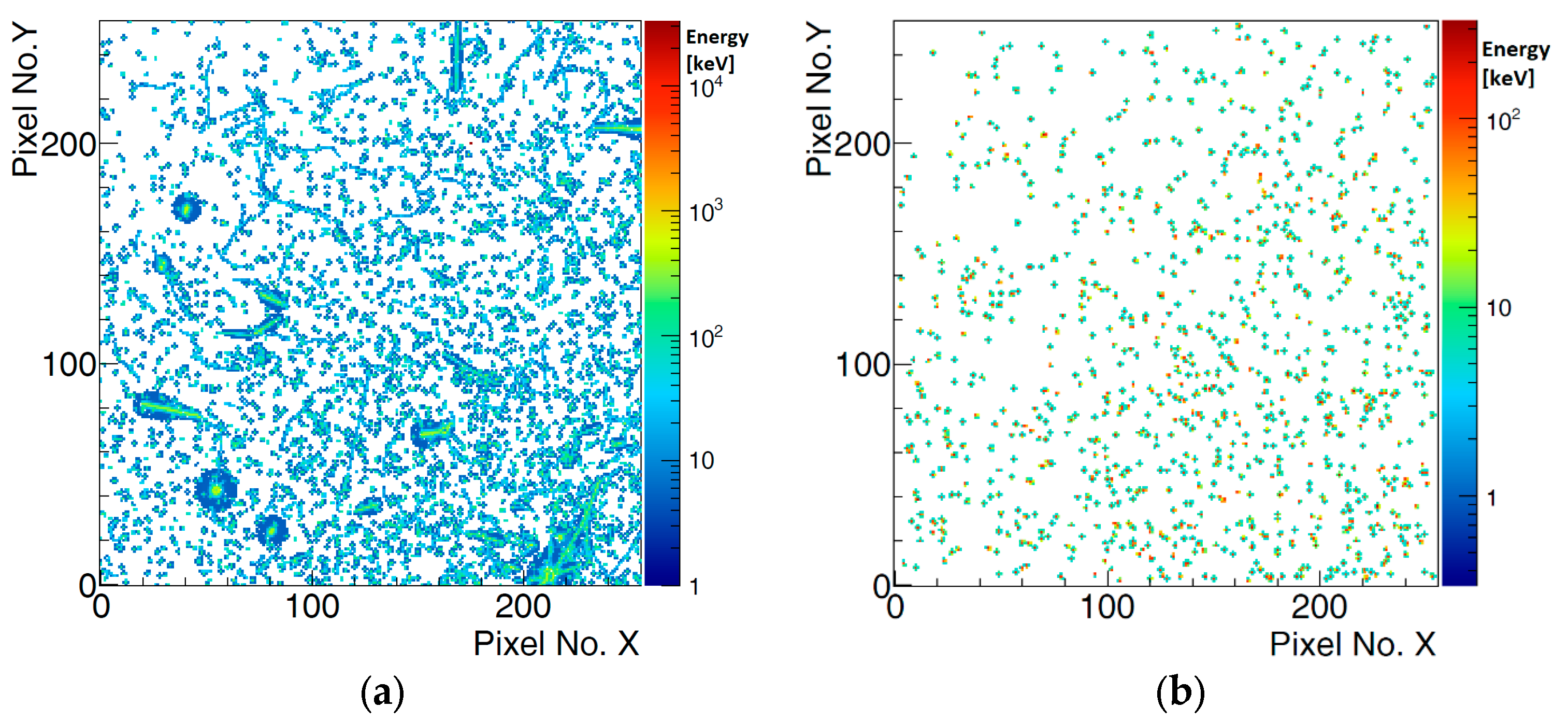
5.2. Test Beam Measurement
6. Deployment and Modifications
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Llopart, X.; Ballabriga, R.; Campbell, M.; Tlustos, L.; Wong, W. Timepix, a 65k programmable pixel readout chip for arrival time, energy and/or photon counting measurements. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2007, 581, 485–494. [Google Scholar] [CrossRef]
- Tamburrino, A.; Claps, G.; Cordella, F.; Murtas, F.; Pacella, D. Timepix3 detector for measuring radon decay products. J. Instrum. 2022, 17, P06009. [Google Scholar] [CrossRef]
- Kelleter, L.; Schmidt, S.; Subramanian, M.; Marek, L.; Granja, C.; Jakubek, J.; Jäkel, O.; Debus, J.; Martisikova, M. Characterisation of a customised 4-chip Timepix3 module for charged-particle tracking. Radiat. Meas. 2024, 173, 107086. [Google Scholar] [CrossRef]
- Granja, C.; Jakubek, J.; Soukup, P.; Jakubek, M.; Turecek, D.; Marek, L.; Oancea, C.; Vuolo, M.; Datkova, M.; Zach, V. Spectral tracking of energetic charged particles in wide field-of-view with miniaturized telescope MiniPIX Timepix3 1× 2 stack. J. Instrum. 2022, 17, C03028. [Google Scholar] [CrossRef]
- Novak, A.; Granja, C.; Sagatova, A.; Zach, V.; Stursa, J.; Oancea, C. Spectral tracking of proton beams by the Timepix3 detector with GaAs, CdTe and Si sensors. J. Instrum. 2023, 18, C01022. [Google Scholar] [CrossRef]
- Burian, P.; Broulím, P.; Bergmann, B.; Georgiev, V.; Pospíšil, S.; Pušman, L.; Zich, J. Timepix3 detector network at ATLAS experiment. J. Instrum. 2018, 13, C11024. [Google Scholar] [CrossRef]
- Llopart, X.; Alozy, J.; Ballabriga, R.; Campbell, M.; Egidos, N.; Fernandez, J.M.; Heijne, E.; Kremastiotis, I.; Santin, E.; Tlustos, L. Study of low power front-ends for hybrid pixel detectors with sub-ns time tagging. J. Instrum. 2019, 14, C01024. [Google Scholar] [CrossRef]
- Sandberg, H.; Bertsche, W.; Bodart, D.; Dehning, B.; Gibson, S.; Levasseur, S.; Satou, K.; Schneider, G.; Storey, J.W.; Veness, R. First use of Timepix3 hybrid pixel detectors in ultra-high vacuum for beam profile measurements. J. Instrum. 2019, 14, C01013. [Google Scholar] [CrossRef]
- Cabrera, G.; Jensen, S.; Joul, J.; McLean, M.; Sandberg, H.; Storey, J. Rad-hard readout system for Timepix3 Hybrid Pixel Detectors. J. Instrum. 2025, 20, C02009. [Google Scholar] [CrossRef]
- IEAP Software Repository. Available online: https://software.utef.cvut.cz (accessed on 10 November 2024).
- Web of Medipix Collaboration at CERN. Available online: https://medipix.web.cern.ch/ (accessed on 10 November 2024).
- Ballabriga, R.; Campbell, M.; Llopart, X. ASIC developments for radiation imaging applications: The medipix and timepix family. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2018, 878, 10–23. [Google Scholar] [CrossRef]
- Turecek, D.; Jakubek, J.; Soukup, P. USB 3.0 readout and time-walk correction method for Timepix3 detector. J. Instrum. 2016, 11, C12065. [Google Scholar] [CrossRef]
- Pitters, F.M.; Nurnberg, A.M.; Munker, M.; Dannheim, D.; Fiergolski, A.; Hynds, D.; Klempt, W.; Llopart Cudie, X.; Munker, M.; Nurnberg, A.M.; et al. Time and Energy Calibration of Timepix3 Assemblies with Thin Silicon Sensors; No. CLICdp-Note-2018-008; Research Report; CERN: Genève, Switzerland, 2018. [Google Scholar]
- Smolyanskiy, P.; Bacak, M.; Bergmann, B.; Broulím, P.; Burian, P.; Čelko, T.; Garvey, D.; Gunthoti, K.; Infantes, F.G.; Mánek, P. A two-layer Timepix3 stack for improved charged particle tracking and radiation field decomposition. J. Instrum. 2024, 19, C02016. [Google Scholar] [CrossRef]
- 3A Positive Low Drop Voltage Regulator. Available online: https://lhcb-elec.web.cern.ch/upgrade_docs/lhc4913.pdf (accessed on 10 November 2024).
- Sopczak, A. Luminosity monitoring in ATLAS with MPX detectors. J. Instrum. 2014, 9, C01027. [Google Scholar] [CrossRef]
- Wang, J.J.; Rezzak, N.; Hawley, F.; Bakker, G.; McCollum, J.; Hamdy, E. Radiation Characteristics of Field Programmable Gate Array Using Complementary-Sonos Configuration Cell. Available online: https://www.microsemi.com/document-portal/doc_view/1244474-rt-polarfire-radiation-test-report (accessed on 10 November 2024).
- Michelis, S.; Van Der Blij, N.H.; Ripamonti, G.; Antoszczuk, P.D. bPOL48V a rad-hard 48V DC/DC Converter for Space and HEP Applications. In Proceedings of the 2023 13th European Space Power Conference (ESPC), Elche, Spain, 2–6 October 2023; pp. 1–4. [Google Scholar]
- bPOL48V_V2.1 Datasheet CERN. Available online: https://power-distribution.web.cern.ch/modules/ (accessed on 10 November 2024).
- Soós, C.; Détraz, S.; Olanterä, L.; Sigaud, C.; Troska, J.; Vasey, F.; Zeiler, M. Versatile Link PLUS transceiver development. J. Instrum. 2017, 12, C03068. [Google Scholar] [CrossRef]
- HAN Pilot Platform. Terasic Website. Available online: https://www.terasic.com.tw/cgi-bin/page/archive.pl?Language=English&CategoryNo=216&No=1133#contents (accessed on 10 November 2024).
- Pitters, F.; Tehrani, N.A.; Dannheim, D.; Fiergolski, A.; Hynds, D.; Klempt, W.; Llopart, X.; Munker, M.; Nürnberg, A.; Spannagel, S. Time resolution studies of Timepix3 assemblies with thin silicon pixel sensors. J. Instrum. 2020, 14, P05022. [Google Scholar] [CrossRef]
- Heijhoff, K.; Akiba, K.; van Beuzekom, M.; Bosch, P.; Buytaert, J.; Campbell, M.; Colijn, A.P.; Collins, P.; Dall’Occo, E.; Evans, T.; et al. Timing performance of the LHCb VELO Timepix3 telescope. J. Instrum. 2020, 15, P09035. [Google Scholar] [CrossRef]
- Geertsema, R. Dialing Back Time on Timepix3—A Study on the Timing Performance of Timepix3. Master’s Thesis, Univresity of Amsterdam, Amsterdam, The Netherlands, 2019. [Google Scholar]
- Růžička, O.; Kulhánek, T.; Burian, P.; Farkaš, M.; Urban, O. Power Management of Timepix3 Measurement Chain. In Proceedings of the 2024 International Conference on Applied Electronics (AE), Pilsen, Czech Republic, 4 September 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 1–4. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detectors | Det0 => De1 | Det0 => De2 | Det0 => De3 | Det0 => De4 | Det0 => De5 |
|---|---|---|---|---|---|
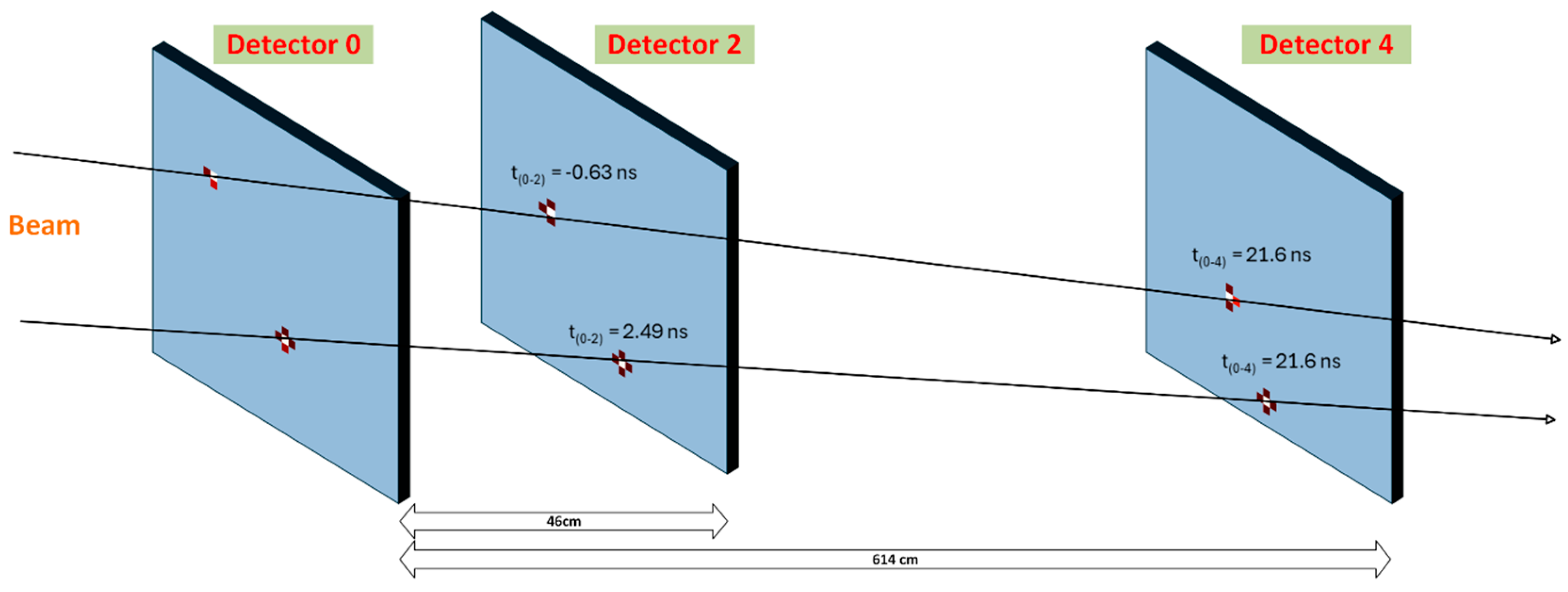
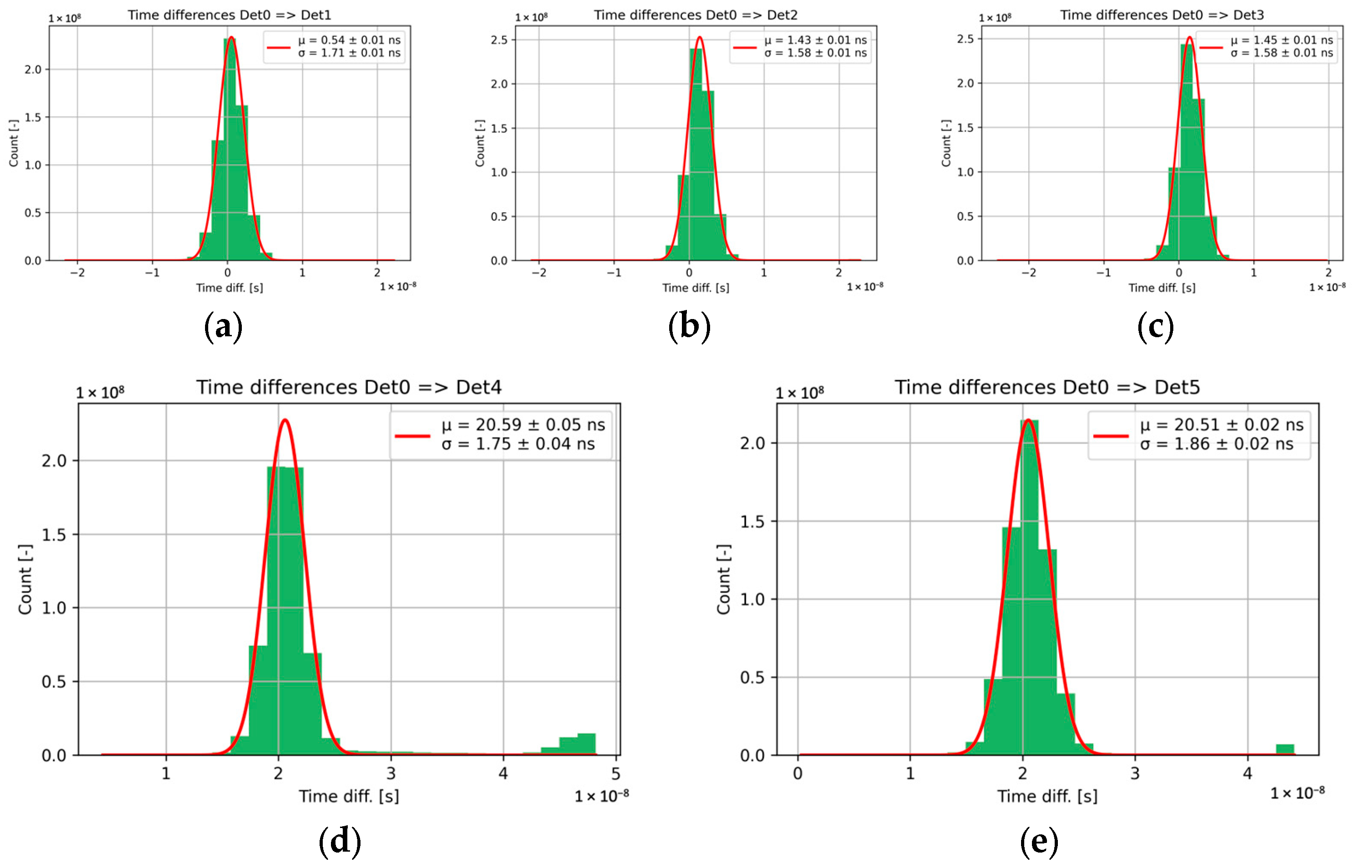
| Distance [cm] | 0 | 46 | 46 | 614 | 614 |
| Time difference/Meas. ToF: mean [ns] | 0.54 | 1.43 | 1.45 | 20.59 | 20.51 |
| Time difference/Meas. ToF: sigma [ns] | 1.71 | 1.58 | 1.58 | 1.75 | 1.86 |
| Calculated Time of Flight [ns] | 0.00 | 1.52 | 1.52 | 20.26 | 20.26 |
| Error of measured ToF (Measured-Calculated) [ns] | 0.54 | −0.09 | −0.07 | 0.33 | 0.25 |
| Detector | D0 | D1 | D2 | D3 | D4 | D5 |
|---|---|---|---|---|---|---|
| D0 | --- | 0.54 | −0.09 | −0.07 | 0.33 | 0.25 |
| D1 | --- | --- | −0.69 | −0.44 | 0.02 | −0.48 |
| D2 | --- | --- | --- | −0.04 | 0.22 | 0.5 |
| D3 | --- | --- | --- | --- | 0.73 | −0.13 |
| D4 | --- | --- | --- | --- | --- | 0.18 |
| D5 | --- | --- | --- | --- | --- | --- |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Burian, P.; Bergmann, B.; Broulím, P.; Farkaš, M.; Kulhánek, T.; Mánek, P.; Růžička, O.; Smolyanskiy, P.; Urban, O.; Zich, J. Enhanced Readout System for Timepix3-Based Detectors in Large-Scale Scientific Facilities. Sensors 2025, 25, 1860. https://doi.org/10.3390/s25061860
Burian P, Bergmann B, Broulím P, Farkaš M, Kulhánek T, Mánek P, Růžička O, Smolyanskiy P, Urban O, Zich J. Enhanced Readout System for Timepix3-Based Detectors in Large-Scale Scientific Facilities. Sensors. 2025; 25(6):1860. https://doi.org/10.3390/s25061860
Chicago/Turabian StyleBurian, Petr, Benedikt Bergmann, Pavel Broulím, Martin Farkaš, Tomáš Kulhánek, Petr Mánek, Ondřej Růžička, Petr Smolyanskiy, Ondřej Urban, and Jan Zich. 2025. "Enhanced Readout System for Timepix3-Based Detectors in Large-Scale Scientific Facilities" Sensors 25, no. 6: 1860. https://doi.org/10.3390/s25061860
APA StyleBurian, P., Bergmann, B., Broulím, P., Farkaš, M., Kulhánek, T., Mánek, P., Růžička, O., Smolyanskiy, P., Urban, O., & Zich, J. (2025). Enhanced Readout System for Timepix3-Based Detectors in Large-Scale Scientific Facilities. Sensors, 25(6), 1860. https://doi.org/10.3390/s25061860