
Experimental Study on Monitoring Equipment for the Scouring and Sedimentation of Wharf Bank Slopes Based on Heat Transfer Principles

Abstract
1. Introduction
2. Theoretical Foundations and Research Methods
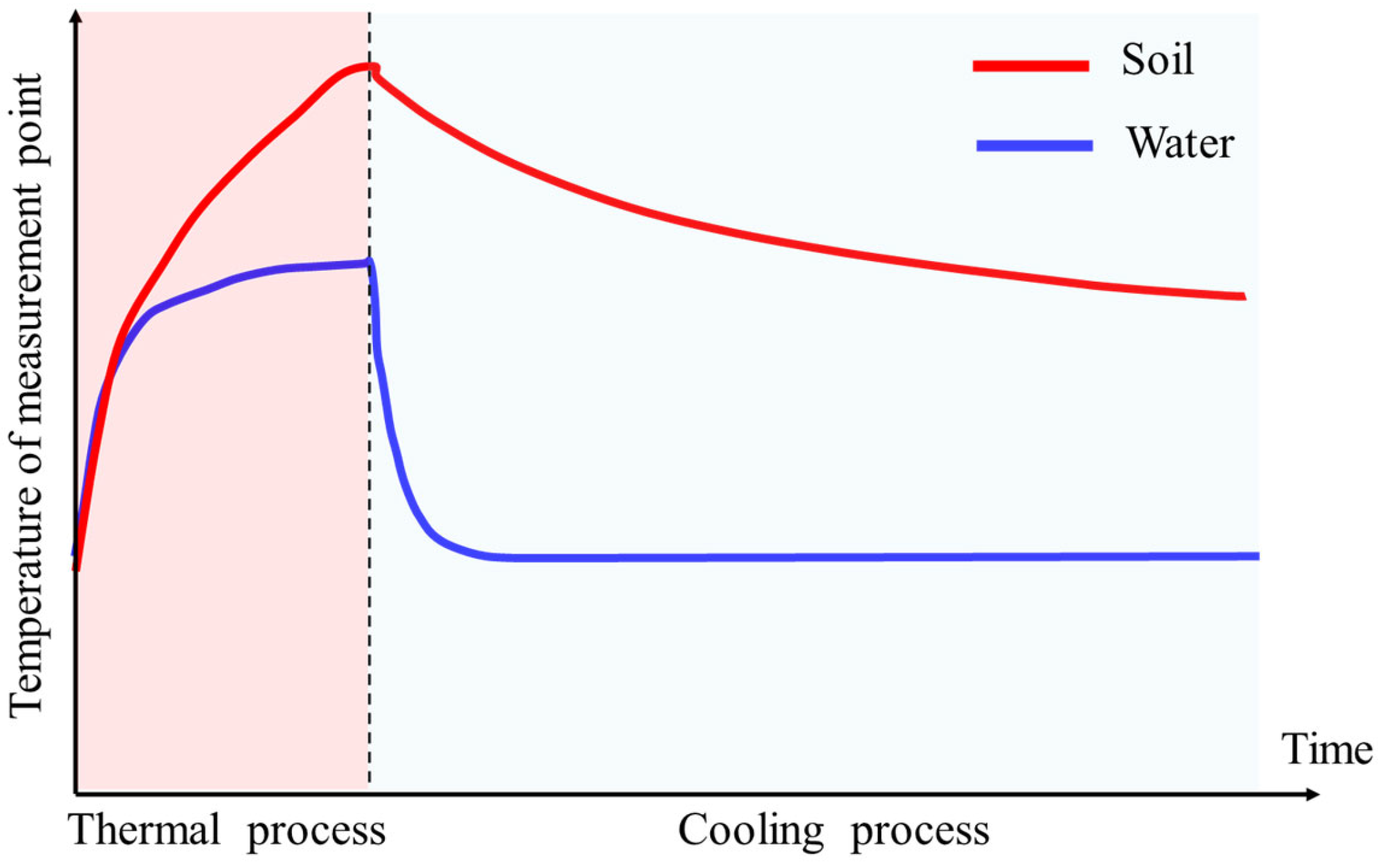
2.1. Heat Transfer Theory of Water–Soil Interface Identification
2.2. Unsteady-State Heat Transfer Model Based on a Linear Heat Source
3. Monitoring Equipment Design and Development
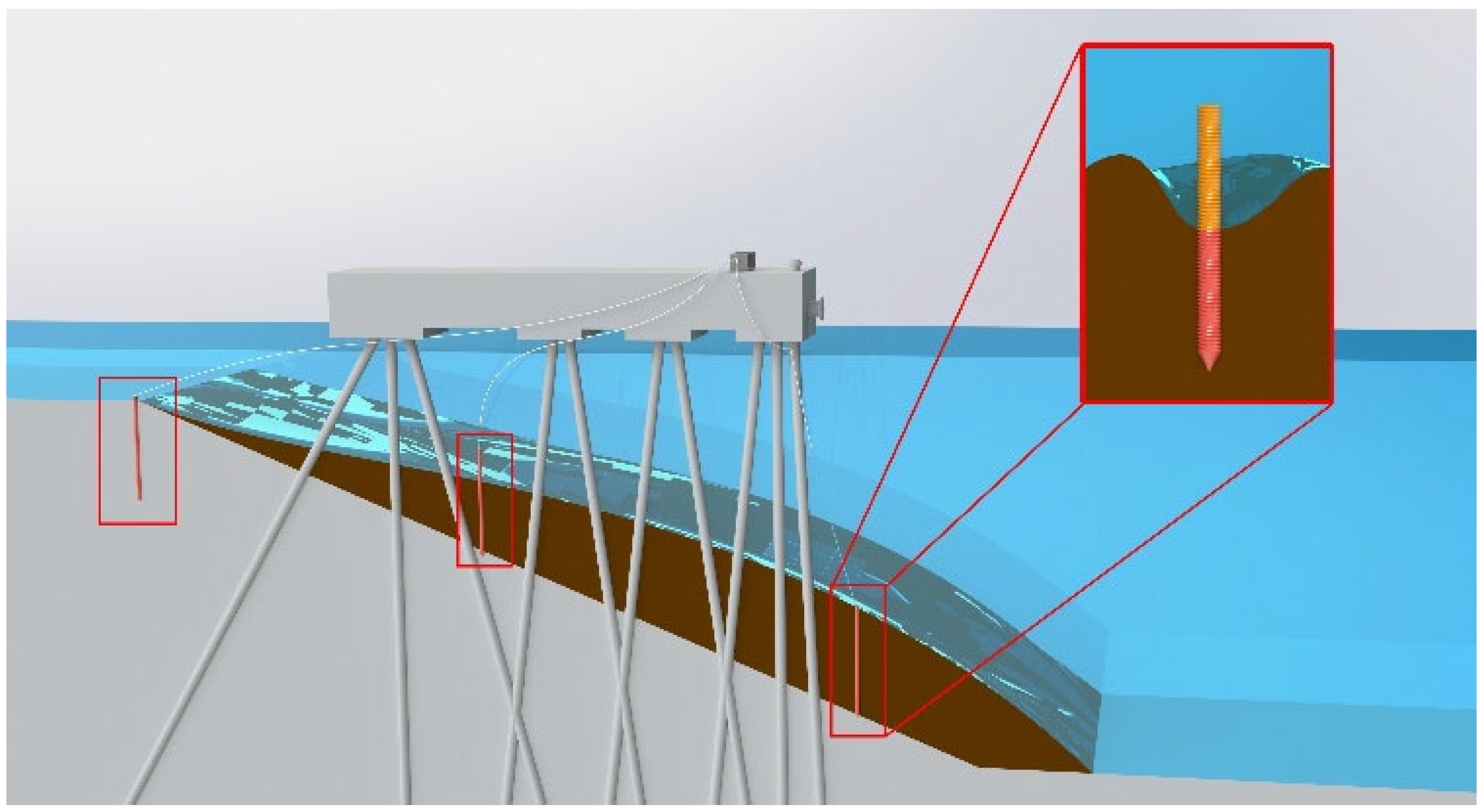
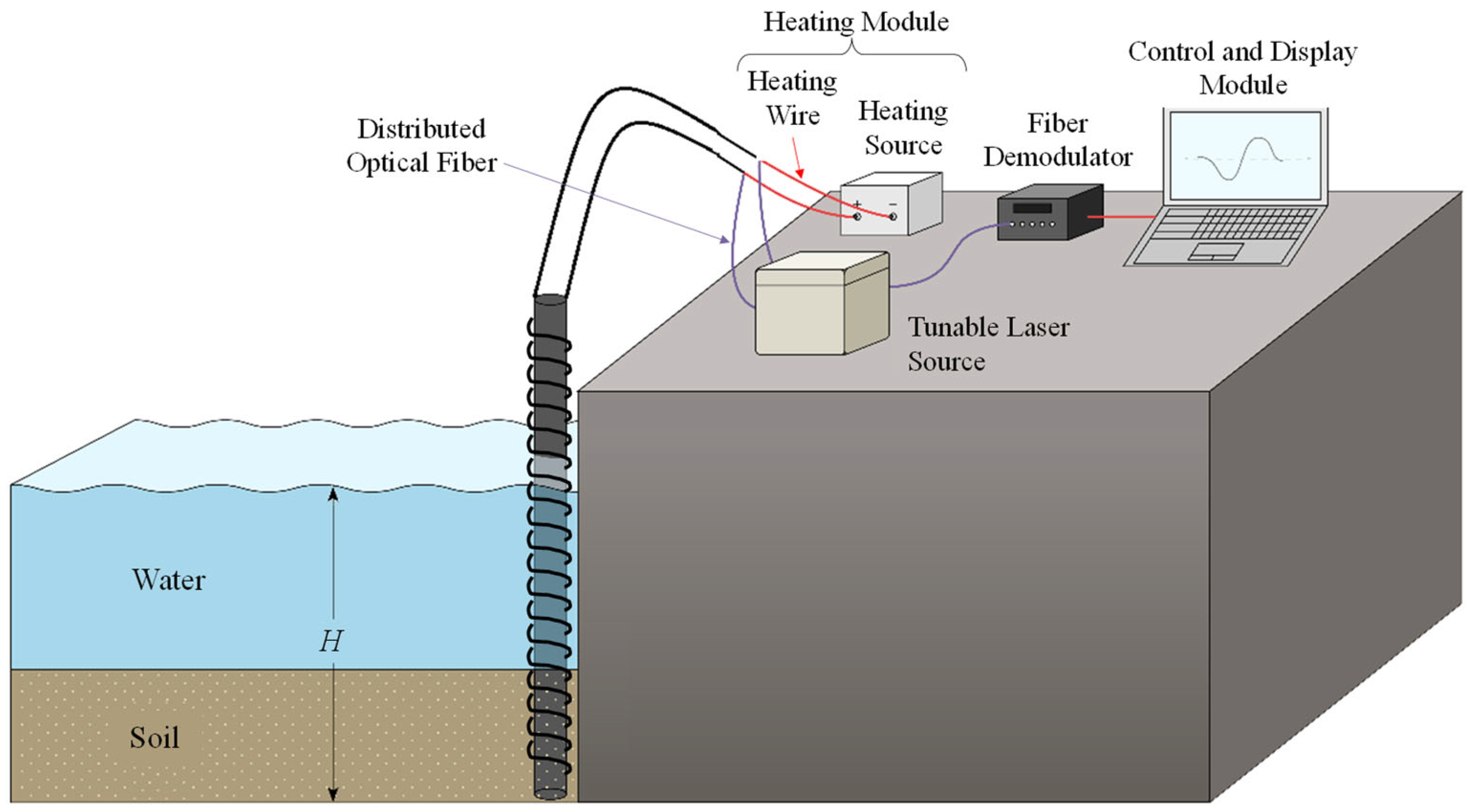
3.1. Principles of Overall Equipment Design
3.2. Modular Design of the Equipment
4. Experimental Verification and Result Analysis
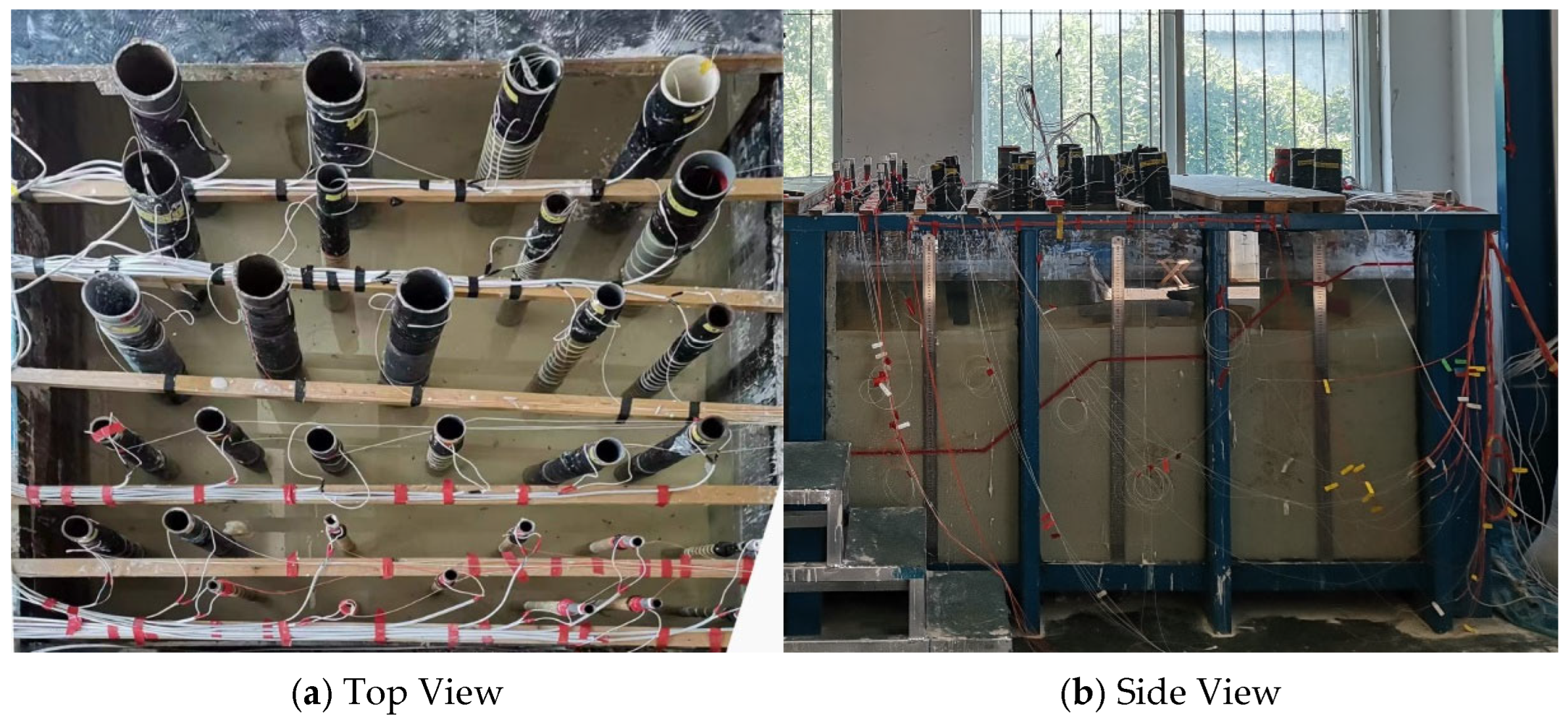
4.1. Experimental Setup
4.2. Equipment and Materials
4.3. Procedure and Operations
4.4. Results Analysis and Evaluation
4.4.1. Analysis and Evaluation Methods
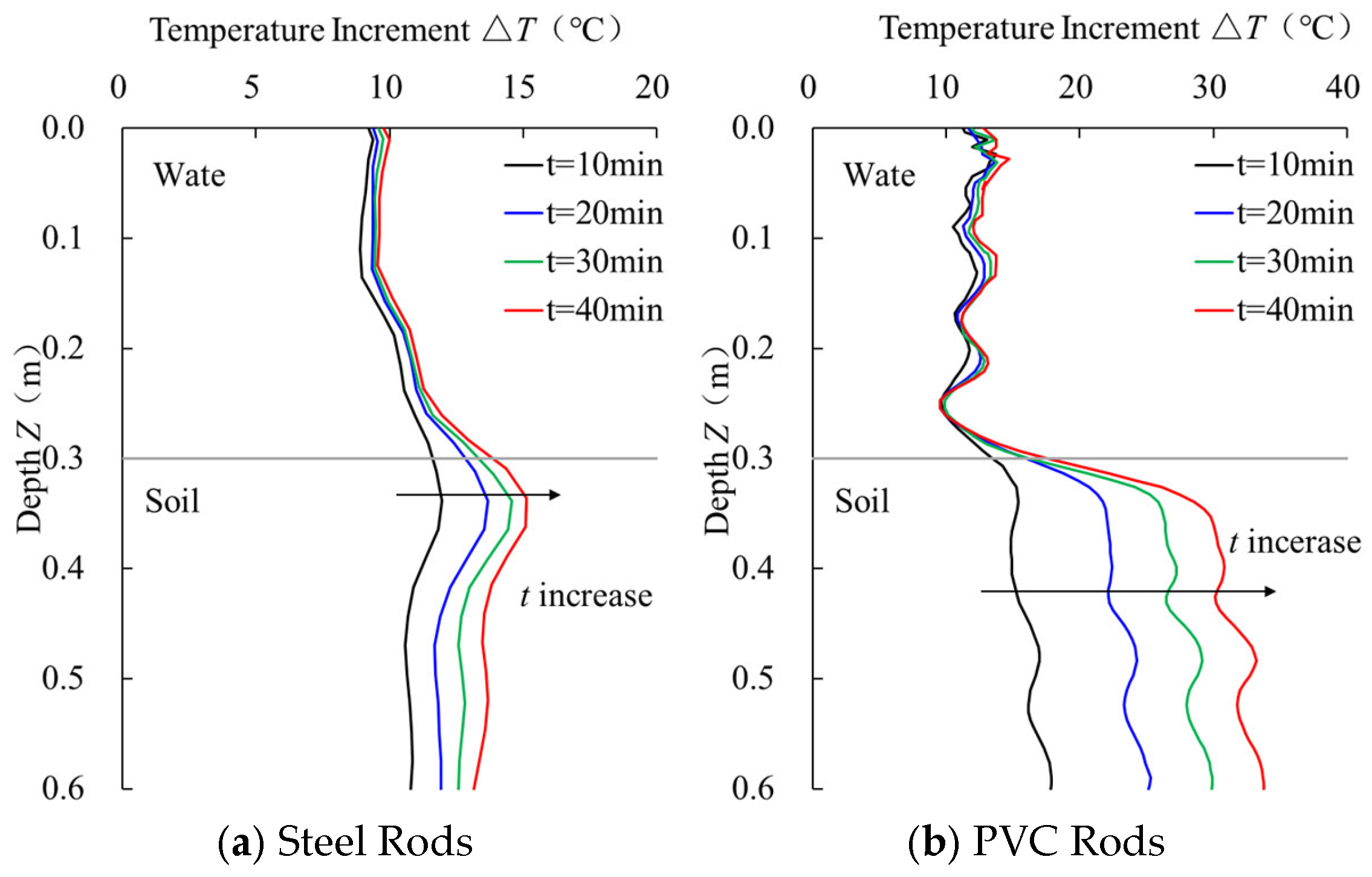
4.4.2. Sensor Performance Analysis by Material
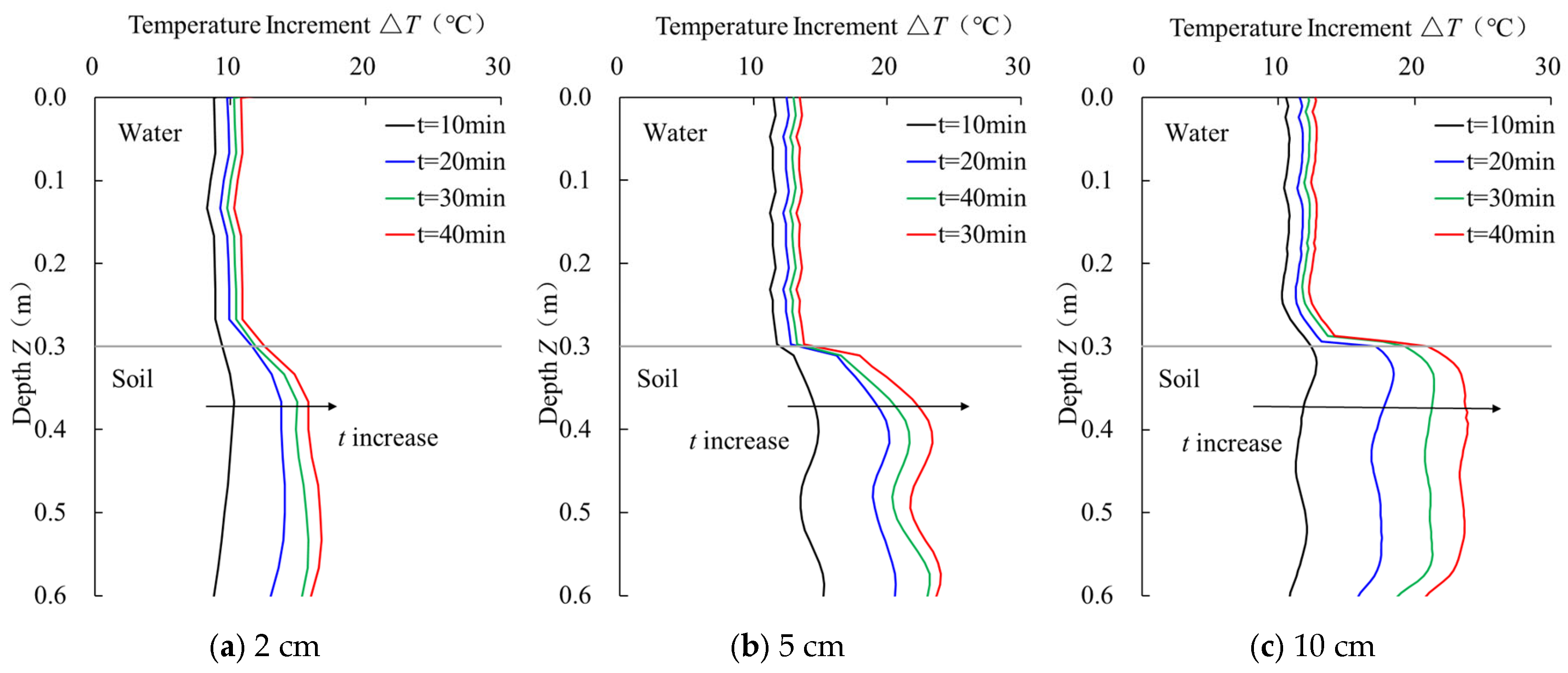
4.4.3. Sensor Performance Analysis by Pipe Diameters
4.4.4. Sensor Performance Analysis by Wrapping Pitches
5. Conclusions
- (1)
- The device uses a linear heat source as the temperature disturbance source, combined with a distributed optical fiber sensor, achieving real-time monitoring of the temperature gradient at the water–soil interface. Its modular design significantly improves the device’s adaptability and ease of operation in complex experimental environments. Experimental results prove that the device can accurately capture dynamic changes at the water–soil interface, meeting the needs for monitoring shore scouring and sedimentation.
- (2)
- Experimental results indicate that a 20-min heating duration is the optimal operating point for the device’s performance, as it strikes a balance between temperature response sensitivity and monitoring data stability. PVC sensors perform excellently in responding to the temperature gradient at the water–soil interface, making them particularly suitable for monitoring scenarios that require high sensitivity. On the other hand, steel sensors demonstrate higher temperature distribution uniformity and stability under the same conditions, making them suitable for engineering environments requiring long-term monitoring.
- (3)
- Pipe diameter has a significant impact on the device’s sensitivity and stability: sensors with smaller diameters are more sensitive to temperature changes but show slightly reduced stability when the heating time is short. Sensors with larger diameters exhibit more stable temperature distribution during long-term heating. The fiber optic winding pitch has little effect on the temperature difference in the water section, but it makes a significant contribution to the temperature difference increment and temperature gradient in the soil section. By adjusting the pitch, the device’s response in different media can be further optimized.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Olorunju Mogbojuri, A.; Akinlo, A.; Oloyede, O.J. Goal programming approach for waterway transportation system. In Proceedings of the International Conference on Industrial Engineering and Operations Management, Detroit, MI, USA, 10–12 October 2023. [Google Scholar]
- Xu, X.; Di, X.; Zheng, Y.; Liu, A.; Hou, C.; Lan, X. Dynamic response characteristics and pile damage identification of high-piled wharves under dynamic loading. Appl. Sci. 2024, 14, 9250. [Google Scholar] [CrossRef]
- Jo, A.; Eberli, G.P.; Grasmueck, M. Margin collapse and slope failure along southwestern Great Bahama Bank. Sediment. Geol. 2015, 317, 43–52. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, P. Seasonal dynamics of seabed evolution and its implications for sediment transport. Estuar. Coast. Shelf Sci. 2020, 239, 106751. [Google Scholar] [CrossRef]
- Li, X.; Chen, Q. Influence of seasonal flooding on sedimentation patterns in estuarine environments. Mar. Geol. 2018, 398, 111–123. [Google Scholar] [CrossRef]
- Hasholt, B.; Bobrovitskaya, N.; Bogen, J.; McNamara, J.; Mernild, S.H.; Milburn, D.; Walling, D.E. Sediment transport to the Arctic Ocean and adjoining cold oceans. Hydrol. Res. 2006, 37, 413–432. [Google Scholar] [CrossRef]
- Hohensinner, S.; Grupe, S.; Klasz, G.; Payer, T. Long-term deposition of fine sediments in Vienna’s Danube floodplain before and after channelization. Geomorphology 2022, 398, 108038. [Google Scholar] [CrossRef]
- Chen, M.; Feng, A.; Wei, W.; Jiang, Q. Statistical analysis of long-term deformations and determination of warning thresholds for near-dam reservoir bank slopes. Bull. Eng. Geol. Environ. 2024, 83, 437. [Google Scholar] [CrossRef]
- Ali, A.; Abdullah, M.R.; Safuan CD, M.; Afiq-Firdaus, A.M.; Bachok, Z.; Akhir MF, M.; Latif, R.; Muhamad, A.; Seng, T.H.; Roslee, A.; et al. Side-scan sonar coupled with scuba diving observation for enhanced monitoring of benthic artificial reefs along the coast of Terengganu, Peninsular Malaysia. J. Mar. Sci. Eng. 2022, 10, 1309. [Google Scholar] [CrossRef]
- Siwabessy, P.J.W.; Tran, M.; Picard, K.; Brooke, B.P.; Huang, Z.; Smit, N.; Williams, D.K.; Nicholas, W.A.; Nichol, S.L.; Atkinson, I. Modelling the distribution of hard seabed using calibrated multibeam acoustic backscatter data in a tropical, macrotidal embayment: Darwin Harbour, Australia. Mar. Geophys. Res. 2018, 39, 249–269. [Google Scholar] [CrossRef]
- Bian, J.-W.; Huang, C.-J. Real-time and long-term monitoring of coastal water turbidity using an ocean buoy equipped with an ADCP. Sensors 2024, 24, 6979. [Google Scholar] [CrossRef]
- Zhang, M.; Fang, S.; Nie, J.; Fei, P.; Aliev, A.E.; Baughman, R.H.; Xu, M. Self-powered, electrochemical carbon nanotube pressure sensors for wave monitoring. Adv. Funct. Mater. 2020, 30, 2004564. [Google Scholar] [CrossRef]
- Zheng, Y.; Wang, X.; Zhu, Z.-W. A simple macro-bending loss optical fiber crack sensor for the use over a large displacement range. Opt. Fiber Technol. 2020, 58, 102280. [Google Scholar] [CrossRef]
- Ogarko, V.; Luding, S. A fast multilevel algorithm for contact detection of arbitrarily polydisperse objects. Comput. Phys. Commun. 2012, 183, 931–936. [Google Scholar] [CrossRef]
- Tian, M.; Yang, S.; Zhang, P.; Guo, Q. Development of the gravel pressure and voice synchronous observation system and application in bedload transport measurement. Appl. Sci. 2023, 13, 9429. [Google Scholar] [CrossRef]
- Matos, T.; Rocha, J.L.; Faria, C.L.; Martins, M.S.; Henriques, R.; Goncalves, L.M. Development of an automated sensor for in-situ continuous monitoring of streambed sediment height of a waterway. Sci. Total Environ. 2022, 808, 152164. [Google Scholar] [CrossRef] [PubMed]
- Bogue, R.L.; Brough, M. Applications of sonar technology in sediment transport monitoring: Limitations and advancements. Ocean Eng. 2019, 183, 171–179. [Google Scholar] [CrossRef]
- Tian, F.; Zhang, Y. Satellite remote sensing for marine environment monitoring: Advantages and limitations. Mar. Pollut. Bull. 2020, 157, 111332. [Google Scholar] [CrossRef]
- Schenato, L. A Review of Distributed Fibre Optic Sensors for Geo-Hydrological Applications. Appl. Sci. 2017, 7, 896. [Google Scholar] [CrossRef]
- Susanto, K.; Malet, J.P.; Gance, J.; Marc, V. Fiber Optics Distributed Temperature Sensing (FO-DTS) for Long-term Monitoring of Soil Water Changes in the Subsoil. In EAGE/DGG Workshop 2017; European Association of Geoscientists & Engineers: Utrecht, The Netherlands, 2017; p. 508. [Google Scholar] [CrossRef]
- Yin, J.; Zhang, H.; Liu, M.; Li, Y. Research on Seabed Erosion Monitoring Technology of Offshore Structures Based on the Principle of Heat Transfer. Appl. Sci. 2024, 14, 4686. [Google Scholar] [CrossRef]
- Yin, J.; Zhang, H.; Liu, M.; Yang, X.; Zhu, P.; Wang, Y. Numerical Simulation Analysis of Dock Bank Slopes’Soil–Water Interface Recognition and Monitoring Device Models Based on Heat Transfer Principles. Appl. Sci. 2024, 14, 8444. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Prototype Serial Number | Material | Pipe Diameter/cm | Winding Pitch/cm |
|---|---|---|---|
| 1 | Steel | 10 | 4 |
| 2 | Steel | 5 | 4 |
| 3 | Steel | 2 | 4 |
| 4 | Steel | 10 | 2 |
| 5 | Steel | 5 | 2 |
| 6 | Steel | 2 | 2 |
| 7 | Steel | 10 | 1 |
| 8 | Steel | 5 | 1 |
| 9 | Steel | 2 | 1 |
| 10 | PVC | 9 | 1 |
| 11 | PVC | 9 | 4 |
| 12 | PVC | 9 | 2 |
| 13 | PVC | 5 | 4 |
| 14 | PVC | 5 | 2 |
| 15 | PVC | 5 | 1 |
| 16 | PVC | 2 | 4 |
| 17 | PVC | 2 | 2 |
| 18 | PVC | 2 | 1 |
| Material | Heating Duration (min) | Average Temperature Difference Increment in Soil (°C) | Average Temperature Difference Increment in Water (°C) | Temperature Gradient (°C) |
|---|---|---|---|---|
| Steel | 10 | 11.01 | 9.55 | 1.47 |
| 20 | 12.29 | 9.86 | 2.44 | |
| 30 | 13.13 | 10.00 | 3.13 | |
| 40 | 13.90 | 10.17 | 3.73 | |
| PVC | 10 | 16.18 | 11.42 | 4.76 |
| 20 | 23.34 | 11.97 | 11.37 | |
| 30 | 28.04 | 12.22 | 15.81 | |
| 40 | 31.66 | 12.46 | 19.19 |
| Material | Heating Duration (min) | Standard Deviation of Temperature Difference in Soil | Uniformity of Temperature Difference in Soil | Standard Deviation of Temperature Difference in Water | Uniformity of Temperature Difference in Water |
|---|---|---|---|---|---|
| Steel | 10 | 0.471 | 0.043 | 0.744 | 0.078 |
| 20 | 0.739 | 0.060 | 0.811 | 0.082 | |
| 30 | 0.755 | 0.057 | 0.774 | 0.077 | |
| 40 | 0.675 | 0.049 | 0.812 | 0.080 | |
| PVC | 10 | 0.995 | 0.062 | 0.899 | 0.079 |
| 20 | 1.082 | 0.046 | 1.063 | 0.089 | |
| 30 | 1.232 | 0.044 | 1.075 | 0.088 | |
| 40 | 1.390 | 0.044 | 1.301 | 0.104 |
| Pipe Diameter | Heating Duration (min) | Average Temperature Difference Increment in Soil (°C) | Average Temperature Difference Increment in Water (°C) | Temperature Gradient (°C) |
|---|---|---|---|---|
| 10 | 10 | 11.74 | 10.63 | 1.11 |
| 20 | 17.40 | 12.42 | 4.98 | |
| 30 | 21.00 | 12.79 | 8.21 | |
| 40 | 23.30 | 13.01 | 10.30 | |
| 5 | 10 | 14.39 | 11.88 | 2.51 |
| 20 | 19.81 | 13.85 | 5.96 | |
| 30 | 22.93 | 14.38 | 8.55 | |
| 40 | 21.63 | 13.60 | 8.03 | |
| 2 | 10 | 9.66 | 10.44 | −0.78 |
| 20 | 13.65 | 11.71 | 1.94 | |
| 30 | 15.18 | 11.90 | 3.28 | |
| 40 | 16.07 | 11.91 | 4.16 |
| Pipe Diameter | Heating Duration (min) | Standard Deviation of Temperature Difference in Soil | Uniformity of Temperature Difference in Soil | Standard Deviation of Temperature Difference in Water | Uniformity of Temperature Difference in Water |
|---|---|---|---|---|---|
| 10 | 10 | 0.421 | 0.036 | 0.488 | 0.046 |
| 20 | 0.525 | 0.030 | 0.938 | 0.076 | |
| 30 | 0.459 | 0.022 | 1.036 | 0.081 | |
| 40 | 0.697 | 0.030 | 1.246 | 0.096 | |
| 5 | 10 | 0.632 | 0.044 | 0.964 | 0.081 |
| 20 | 0.575 | 0.029 | 1.427 | 0.103 | |
| 30 | 0.773 | 0.034 | 1.578 | 0.110 | |
| 40 | 0.958 | 0.044 | 1.279 | 0.094 | |
| 2 | 10 | 0.500 | 0.052 | 1.227 | 0.118 |
| 20 | 0.394 | 0.029 | 1.364 | 0.117 | |
| 30 | 0.562 | 0.037 | 1.431 | 0.120 | |
| 40 | 0.619 | 0.038 | 1.224 | 0.103 |
| Pitch (cm) | Heating Duration (min) | Average Temperature Difference Increment in Soil (°C) | Average Temperature Difference Increment in Water (°C) | Temperature Gradient (°C) |
|---|---|---|---|---|
| 1 | 10 | 4.61 | 3.35 | 1.26 |
| 20 | 5.91 | 3.66 | 2.25 | |
| 30 | 6.78 | 3.83 | 2.96 | |
| 40 | 7.43 | 3.71 | 3.72 | |
| 2 | 10 | 5.33 | 4.29 | 1.04 |
| 20 | 6.54 | 4.41 | 2.13 | |
| 30 | 7.12 | 4.48 | 2.64 | |
| 40 | 7.93 | 4.28 | 3.65 | |
| 4 | 10 | 6.33 | 4.99 | 1.34 |
| 20 | 7.29 | 4.92 | 2.37 | |
| 30 | 7.63 | 4.95 | 2.68 | |
| 40 | 7.98 | 5.04 | 2.94 |
| Pitch (cm) | Heating Duration (min) | Standard Deviation of Temperature Difference in Soil | Uniformity of Temperature Difference in Soil | Standard Deviation of Temperature Difference in Water | Uniformity of Temperature Difference in Water |
|---|---|---|---|---|---|
| 1 | 10 | 0.332 | 0.072 | 0.401 | 0.120 |
| 20 | 0.215 | 0.036 | 0.455 | 0.124 | |
| 30 | 0.344 | 0.051 | 0.466 | 0.122 | |
| 40 | 0.343 | 0.046 | 0.473 | 0.127 | |
| 2 | 10 | 0.103 | 0.019 | 0.523 | 0.122 |
| 20 | 0.164 | 0.025 | 0.496 | 0.112 | |
| 30 | 0.246 | 0.035 | 0.566 | 0.126 | |
| 40 | 0.270 | 0.034 | 0.549 | 0.128 | |
| 4 | 10 | 0.486 | 0.077 | 0.795 | 0.159 |
| 20 | 0.520 | 0.071 | 0.992 | 0.202 | |
| 30 | 0.475 | 0.062 | 0.987 | 0.199 | |
| 40 | 0.523 | 0.066 | 1.048 | 0.208 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, J.; Zhang, H.; Liu, M.; Ma, Q. Experimental Study on Monitoring Equipment for the Scouring and Sedimentation of Wharf Bank Slopes Based on Heat Transfer Principles. Sensors 2025, 25, 1430. https://doi.org/10.3390/s25051430
Yin J, Zhang H, Liu M, Ma Q. Experimental Study on Monitoring Equipment for the Scouring and Sedimentation of Wharf Bank Slopes Based on Heat Transfer Principles. Sensors. 2025; 25(5):1430. https://doi.org/10.3390/s25051430
Chicago/Turabian StyleYin, Jilong, Huaqing Zhang, Mengmeng Liu, and Qian Ma. 2025. "Experimental Study on Monitoring Equipment for the Scouring and Sedimentation of Wharf Bank Slopes Based on Heat Transfer Principles" Sensors 25, no. 5: 1430. https://doi.org/10.3390/s25051430
APA StyleYin, J., Zhang, H., Liu, M., & Ma, Q. (2025). Experimental Study on Monitoring Equipment for the Scouring and Sedimentation of Wharf Bank Slopes Based on Heat Transfer Principles. Sensors, 25(5), 1430. https://doi.org/10.3390/s25051430