3.1. Optical Liquid Detection System
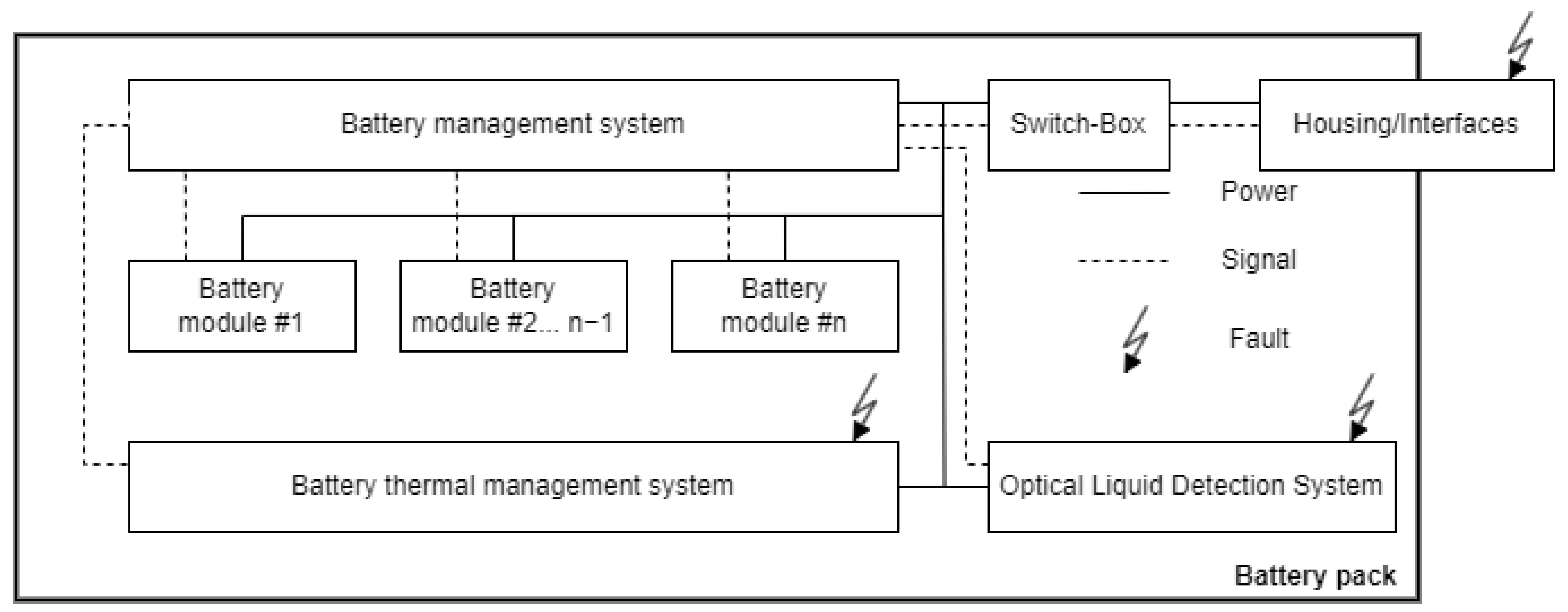
A block diagram of the EV’s battery pack, incorporating the OLDS, is shown in
Figure 1. Although every component in the diagram is susceptible to various faults, the OLDS specifically targets the detection of two particular faults: liquid intrusion and liquid leakage. These faults are highlighted in red in the diagram.
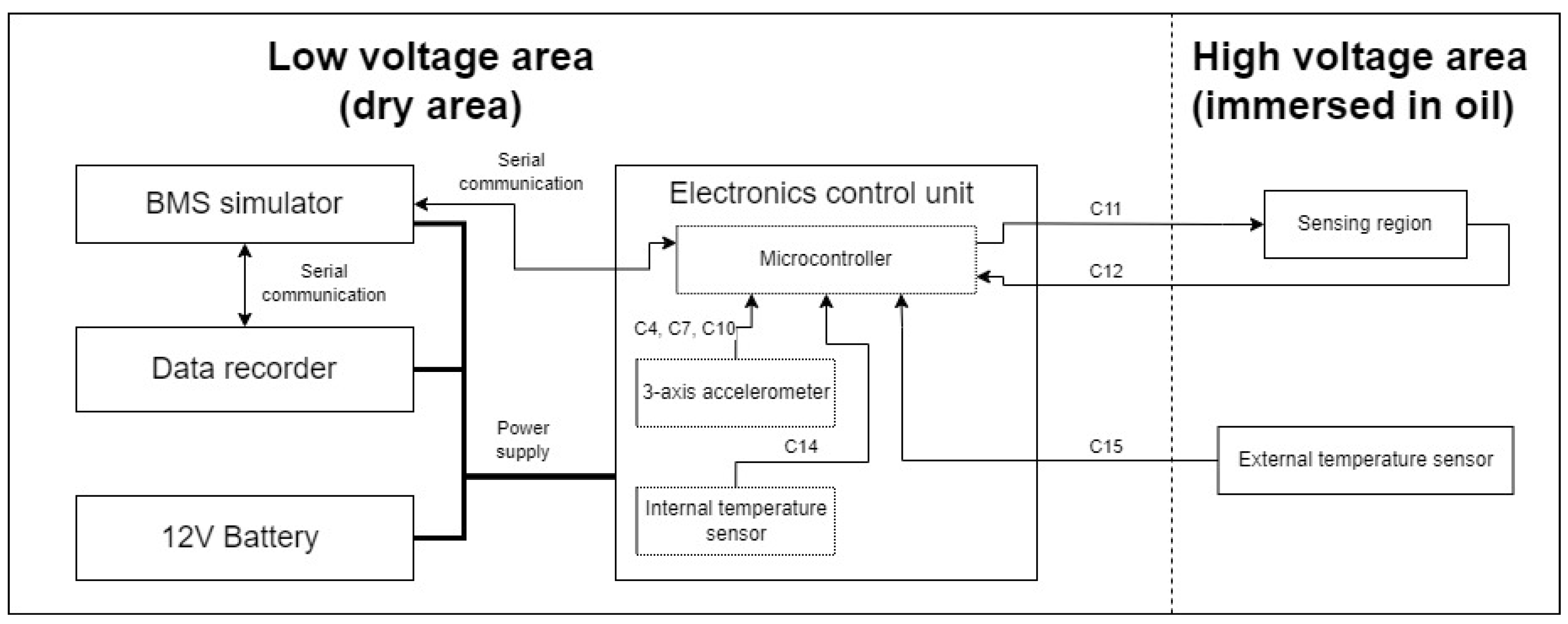
Due to the considerable size, weight, and cost of electric vehicle battery packs, the battery pack used for this research was intentionally simplified. During the tests, a housing of a single battery module, equipped with the developed OLDS, was used. For the housing, a real housing of a series-production electric vehicle was used. The setup, as shown in
Figure 2, includes the battery unit in the low-voltage area along with a data recorder and an electronic control unit (ECU). The developed ECU can have up to four POF sensors connected and one external temperature sensor. The POF cables are guided from the low-voltage area to the high-voltage area, where sensing regions are immersed in the coolant (oil) to monitor the liquid’s condition. The external temperature sensor (thermistor) is situated in the high-voltage area to provide additional data about the oil temperature. These data, however, were not meant to be used by the fault detection algorithms developed in this study. They were purely for representative and debugging purposes. During the tests, only 1 POF sensor with one sensing area was used. The high- and low-voltage areas are named in a such way only for representative purposes—due to safety reasons, during the development and tests no high voltage was used and the system was powered by a 12 V car battery.
The primary objective of the optical liquid detection system was to identify faults, specifically oil leakage or water intrusion. Those technical states are listed in
Table 1.
The table lists three distinct technical states of the battery pack system, categorized as faultless (F0) and two fault states (F1 and F2), within the framework of this simplified battery pack system.
Faultless state (F0): This state reflects the battery pack system operating within its specified functionality and meeting all requirements, with no deviations from expected performance.
Oil leakage state (F1): This state is characterized by unauthorized deviations in coolant levels, potentially due to damage to the battery pack’s structure or sealings. Initially, such a fault could lead to irregularities in the performance of the battery’s thermal management system.
Water intrusion state (F2): In this state, water has entered the system, possibly through a compromised heat exchanger or as a result of condensation. Initially, this could lead to corrosion, create short-circuits, or damage other components through the formation of ice particles in low operating temperatures.
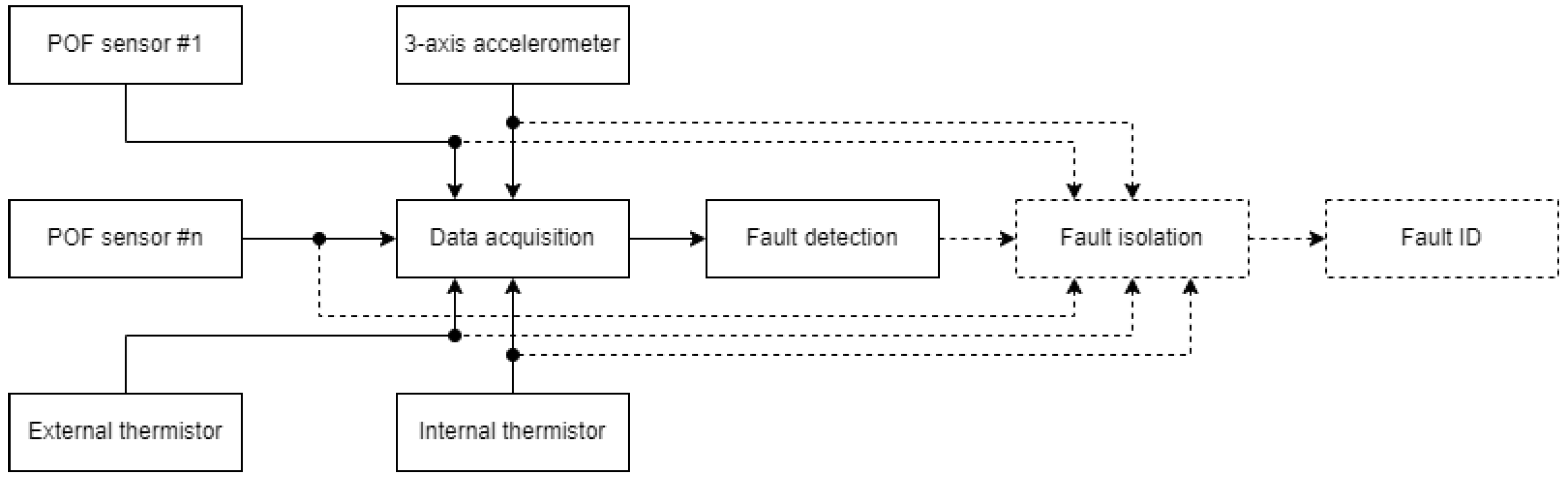
The data processing strategy for detecting relevant faults is outlined in
Figure 3. This strategy involves collecting data from various sensors, including a POF sensor, a 3-axis accelerometer, and both internal and external thermistors.
The system evaluates the gathered data to monitor for any unauthorized deviations from normal operations. If such deviations are detected, the system identifies the presence of a fault and determines the time period during which it occurred. The figure further illustrates, through blocks outlined with dashed lines, that the system is designed to potentially determine the type, location, and time of detection of a fault, as well as assign a fault ID. However, these functionalities are not covered within the scope of this research. Furthermore, while not every sensor mentioned is essential for executing a robust fault detection algorithm, the inclusion of their data aids in the understanding of the system’s behavior and its responses to various fault conditions.
The OLDS developed for this study was designed with a set of specific functional and non-functional requirements tailored to enhance detecting liquid-related faults within automotive battery packs.
3.4. Data Description
For typical BEVs, their battery packs are usually heavy, sizable, and expensive devices. Because of that, significant simplifications were introduced to the mechatronic platform that was used throughout the development and validation phases of this research (
Figure 4). The platform utilized a real housing of a single battery module. Usually, such a battery module is a low-voltage device, and the high-voltage area is generated at the battery pack level (thanks to multiple modules connected in series). For the sake of this research, the areas within the single battery module were designated as low-voltage and high-voltage areas. However, it is important to note that, for safety reasons, no high voltage was applied during the development or testing phases. Instead, the system was powered by a 12 V battery. Operating at high voltages with a large number of cells introduces significant risks, particularly when conducting tests that involve water intrusion into the battery pack module. The presence of water raises the potential for corrosion and short circuits, which could lead to hazardous situations, including thermal runaway and thermal propagation events. Moreover, for the objectives of this initial field testing, the application of high voltage was not necessary. The primary aim of the tests was to assess the performance of the OLDS, particularly its ability to detect oil leakage and water intrusion using a polymer optical fiber refractive index sensor. This type of sensor operates based on optical signals, which are immune to electrical noise and interference, thus eliminating the need for high voltage in the evaluation of sensor performance.
The optical liquid detection system was assembled in the lower section of a real battery pack housing, as presented in
Figure 5. This was conducted in strict accordance with the proposed system architecture, illustrated in
Figure 4. Two key elements of the system, namely, the data recording device (1) and the electronic control unit (2), were placed within a dry, low-voltage area (3) of the system. The high-voltage region (4) was designed for complete immersion in oil, serving as the designated zone for fault injection experiments. This zone was occupied with a fabricated polymer optical fiber sensor (5) and an external thermistor (7), responsible for monitoring the temperature within the immersed environment.
The routing of the POF cable and external thermistor from the high- to low-voltage areas was carefully managed to maintain the integrity of the system. Given the original battery pack housing was not equipped with the necessary provisions for liquid-sensing devices, additional mounting components were necessary. These were designed, 3D-printed using PET-G material, and subsequently incorporated into the system. These components play a critical role in preventing undesired movements of the POF cables that could potentially affect the sensor’s performance. The housings incorporate small openings, strategically engineered to expose the polymer optical fiber cable and its sensing area (6) to the external medium, in this case, oil. As for the system’s power requirements, a 12 V automotive battery was utilized. Given the spatial constraints within the battery pack housing, the power supply unit was located externally. In future work, a BMS simulator will be used to execute fault diagnostic methods based on data provided by the ECU and to transmit this information to the data recorder. During the research phase, however, the BMS simulator was not in operation, and serial communication was directly linked between the ECU and the data recorder. To accelerate the research, the fault detection methods themselves were implemented and evaluated offline, using registered datasets.
To maintain stability and minimize the risk of skewed data due to unintended movements, the system was carefully installed in the trunk of a vehicle for the duration of the tests (
Figure 6). This setup was essential to ensure the integrity of the data collected under various real-world conditions. To maintain the stability of the OLDS, flexible ropes were employed to secure it. This setup ensured that the system stayed firmly in position during the operation of the vehicle, preventing any displacement caused by the vehicle’s movement. The vehicle was used in a typical daily routine throughout the testing phase, which included commuting to and from an office, along with travel on both highways and local roads. This strategy was chosen to replicate the everyday experiences of a standard vehicle, without implementing any specific or unusual driving patterns. The testing was conducted in the Silesian region of Poland, an area characterized by a variety of road types. This geographical consistency in testing was beneficial in enriching the dataset. The real-world scenarios encountered during on-road testing were diverse, involving challenges such as a wide range of operating temperatures and vibrations, typical of standard vehicle operation.
Additionally, the extended duration of the tests, spanning several months, introduced additional complexity to the research. Factors like component aging and a broad range of environmental temperatures had a significant impact on the measurements. These effects made data interpretation and processing more challenging, as they added layers of variability that had to be accurately accounted for in the fault detection system. The practical implications of these real-world testing conditions were crucial in validating the robustness and effectiveness of the proposed diagnostic methodology. Because of different thermal inertia for low- and high-voltage areas, the mechatronic platform incorporated both internal and external thermistors, offering thorough temperature monitoring capabilities. The internal thermistor was placed inside the ECU, to consistently record its temperature. In contrast, the external thermistor was immersed in the oil, near the polymer optical fiber’s sensing area. The POF sensor itself was excited using an LED transmitter, driven with constant current, and was configured to feed its measurement data back to the ECU. Considering that the heat capacity is intrinsically linked to the total volume of the liquid used, this configuration provided a comprehensive insight into the operational conditions surrounding the POF sensor.
To gather extensive and representative data, the collection periods for each dataset varied, ranging from several hours to as long as sixty hours. This approach was strategic, intended to capture the potential variations in daily temperature and assess how these thermal fluctuations might impact the sensor measurements. Additionally, to accurately record the vibrations that the OLDS was subjected to during these tests, a 3-axis accelerometer was employed, providing detailed acceleration measurements along the x, y, and z-axes. This comprehensive approach, combining temperature and vibration data, was important to understand and analyze the behavior of the system and to develop a fault detection system capable of performing reliably under real-world vehicular conditions.
From a process diagnostic point of view, there were several process variables (channels) to handle internal and external devices:
C04(k), C07(k), C10(k)—accelerations measured along the x, y, and z-axes, respectively (using a MEMS accelerometer with ±8 g range, sensitivity scale factor of , and temperature sensitivity of ±);
C11(k)—POF sensor’s input signal;
C12(k)—POF sensor’s output signal;
C14(k)—internal thermistor’s resistance;
C15(k)—external thermistor’s resistance.
The testing methodology employed for the mechatronic platform was designed to mimic real-world conditions as closely as possible. While the vehicle remained primarily stationary throughout the day, it experienced intermittent periods of motion. These movements typically lasted for several dozen minutes and were essential in providing a realistic testing environment. Such periods of vehicle movement ensured that the OLDS was also tested under dynamic conditions. This strategy of data collection allowed the system to be exposed to a spectrum of conditions, including both stationary and moving conditions, offering a comprehensive understanding of the system’s performance under three different technical states:
Faultless state (F0)—with the high-voltage area filled with 16500 mL of dielectric liquid (mineral oil).
Oil leakage fault (F1)—after finishing the F0 experiment, this fault was simulated by leaking oil of a volume .
Water intrusion fault (F2)—after the completion of the F1 experiment, the water intrusion fault was injected (with variable fault magnitudes). Once intruded, the intruded water remained during further experiment scenarios and accumulated with each consecutive water intrusion occurrence.
The research encompassed 21 experiments in total that were categorized based on the technical state of the mechatronic platform. Under faultless conditions (F0), 7 experiments were conducted. Under simulated faults, 5 experiments were carried out that involved an oil leakage fault (F1), and 9 experiments were carried out that involved a water intrusion fault (F2). A parametric summary of the registered data is presented in
Table 2. In this setup, the
parameter was used to quantify the magnitude of the simulated faults, measured in milliliters. For the oil leakage fault experiments, the magnitude of the fault (i.e., the amount of leaked oil) was constant. For the water intrusion fault experiments, however, the
value varied, simulating different degrees of intrusion severity. The duration of each experiment, denoted as
, is recorded in minutes, providing insight into the length of each test scenario. Additionally, the
value represents the total duration for which the vehicle was in motion during each experiment. This motion duration was determined through post-processing of the data, based on an analysis of the logged accelerometer readings. One notable aspect is that one particular experiment under faultless conditions (F0, experiment no. 6) was conducted with the vehicle remaining entirely stationary. This lack of movement provided a unique overview, allowing for the evaluation of the system’s performance in an environment subjected mostly to temperature variations.
For the F1 experiments, the volume of leaked oil was set at 15,000 mL. This volume was chosen to replicate a scenario where the sensor, under normal, non-moving conditions, remains fully submerged in oil. However, the dynamics change once the vehicle begins to move. Particularly during turns, the oil’s distribution inside the container is altered due to centrifugal forces, potentially exposing the sensing region to air. The substantial volume of oil was necessary because only one POF sensor was used by the mechatronic platform, and it was placed at the very bottom of the battery housing. With a single-sensor setup, a choice had to be made between prioritizing early-stage water intrusion detection or optimizing oil leakage detection. Given the experimental nature of this study, it was decided to focus on understanding the system’s fundamental capabilities with the simplest setup before expanding to multi-sensor configurations in future research. This placement results in a trade-off for oil leakage detection. A relatively large amount of oil must be leaked before the system can identify the fault, as the sensor remains submerged until the oil level drops significantly. Regarding the F2 experiments, varying fault magnitudes were introduced to assess the system’s reaction to different levels of severity. The initial fault magnitude was set at a minimal volume of 50 mL, equating to an approximate weight-to-weight concentration of 0.3%. Subsequent increases in the water intrusion magnitude were introduced in a step-wise fashion. The first increase brought the fault magnitude to 150 mL, followed by another increase, reaching the final fault magnitude of 300 mL. This gradual escalation in the fault magnitude enabled a systematic exploration of the system’s detection capabilities and its responsiveness to progressively severe conditions of water intrusion.
The comprehensive data acquisition process resulted in a substantial amount of data, amounting to a total of approximately 140,532,540 data entries. Such an amount of data entries corresponds to approximately 390 h of total experiment duration, offering a rich source of information for analysis and model training. To effectively utilize this extensive dataset, it was categorized into three distinct sets: training data (exp. IDs 5 and 6), testing data (exp.ID no. 6), and verification data (remaining experiments).
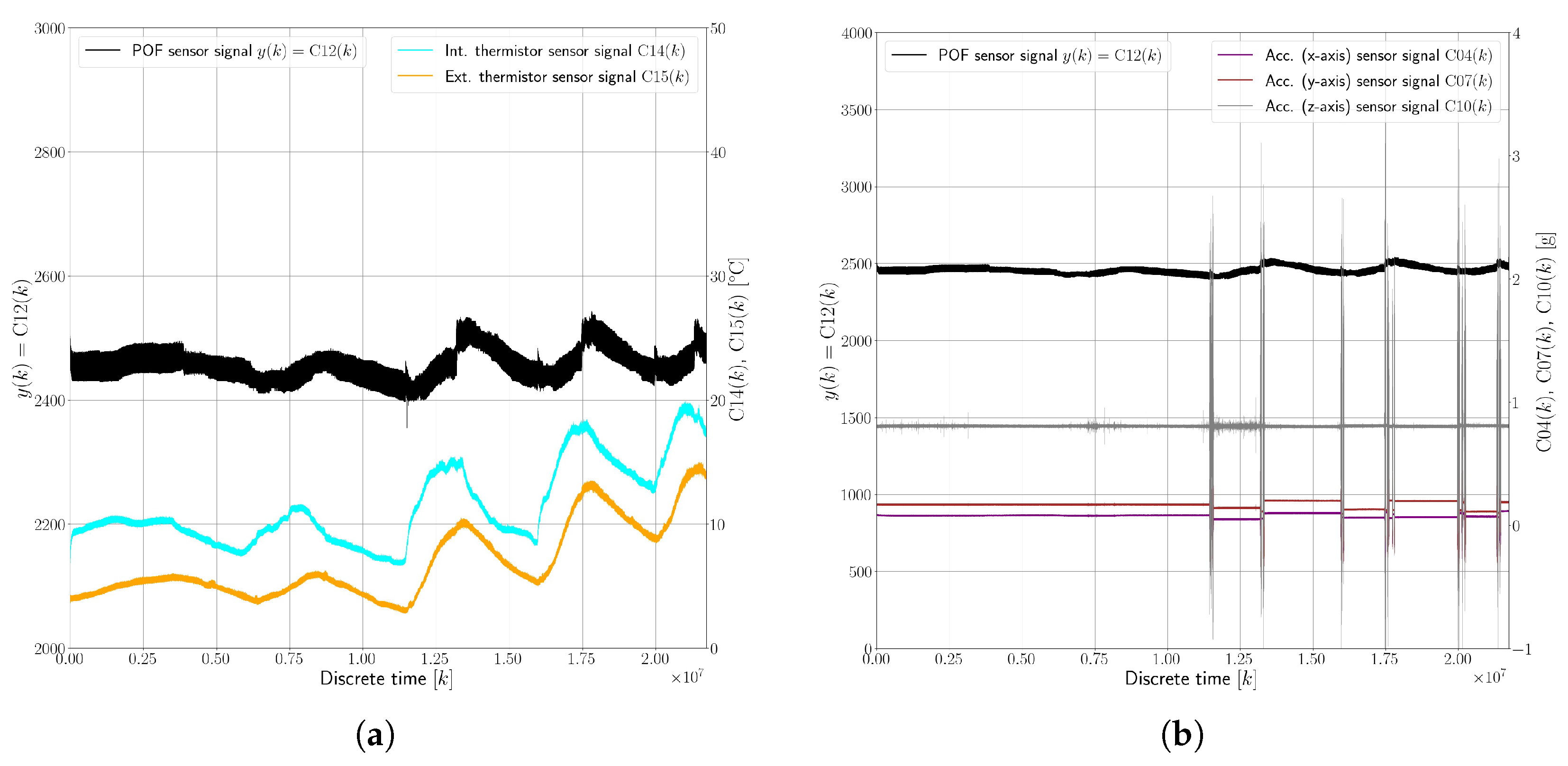
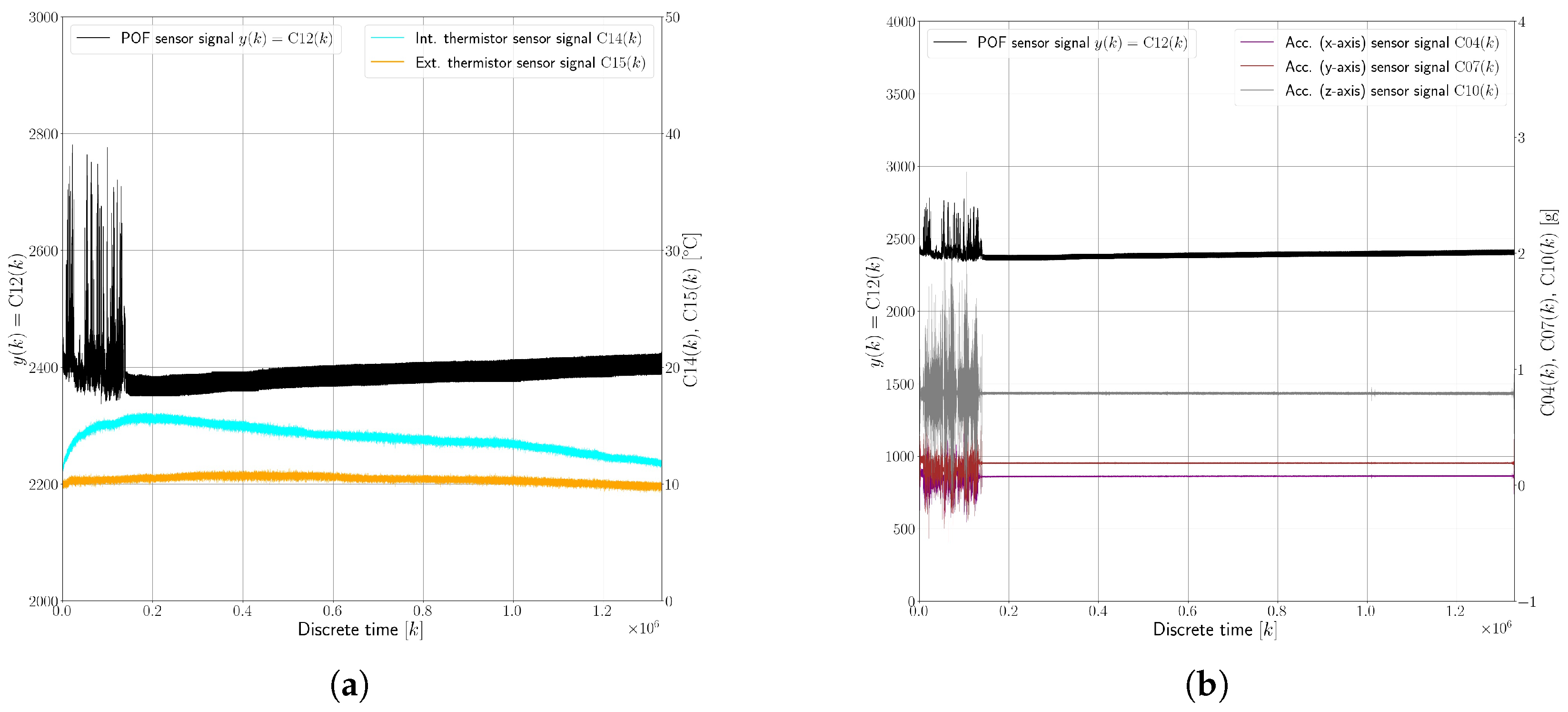
Figure 7 presents an example dataset, visualizing the behavior of the evanescent-wave absorption polymer optical fiber sensor and its interactions with various environmental factors under faultless conditions (F0).
This dataset, spanning 3623 min (approximately 60 h), offers insights into the sensor’s response to both ambient temperature changes and vehicle movement.
Figure 7a illustrates the relationship between the sensor’s response, denoted as
, and the oil temperature, indicated by
. The chart shows how the sensor’s performance can vary with changes in the temperature of the surrounding medium (in this case, oil).
Figure 7b displays the sensor’s response versus accelerations experienced by the vehicle, represented by
,
, and
. These measurements are important for understanding how vehicular movements and vibrations influence the sensor’s readings. Key observations taken from the aforementioned figures include the following:
The internal thermistor in the ECU recorded temperatures ranging from a minimum of 5 °C to a maximum of 20 °C.
The external thermistor , immersed in oil, registered temperatures between 3 °C and 15 °C.
A temperature fluctuation in the 10–15 °C range led to a variation in the POF sensor’s response by about .
Additional temperature increases were noted when the vehicle was in motion, likely due to the activation of other car systems like the heating system, which influenced the temperature inside the vehicle.
Despite observing impacts of around 2–3 g, no significant signal variation in the POF sensor’s response was noted. This implies that the optical coupling between the polymer optical fiber sensors and their LED transmitter and photodiode receiver was stable and unaffected by vibrations of this magnitude.
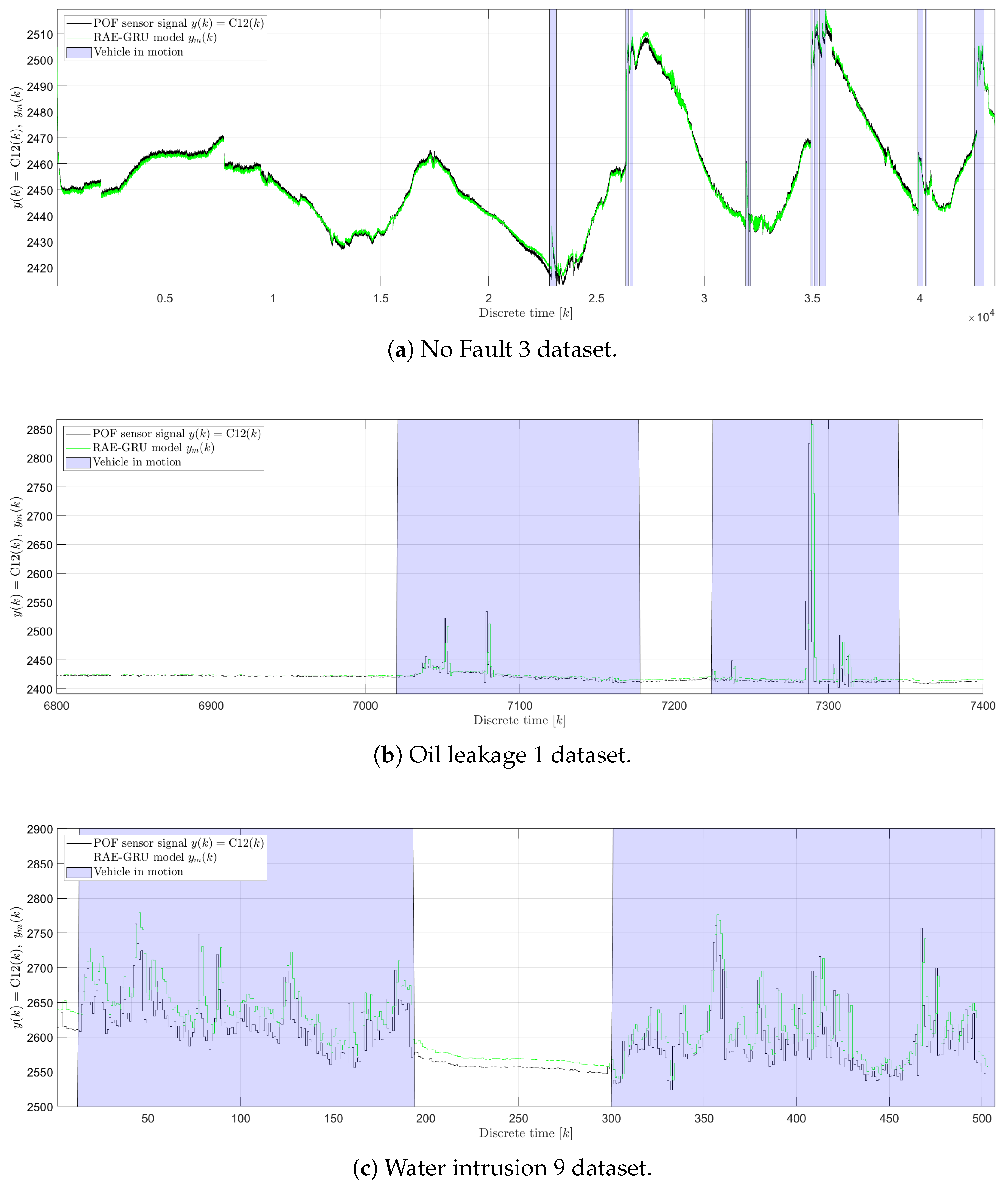
The dataset illustrating the oil leakage fault (F1), shown in
Figure 8, spans a period of 1692 min (approximately 28 h) and provides insights into the sensor’s behavior in a scenario where 90% of the oil had already leaked out before the start of the experiment. This dataset, divided into two key visual representations, shows the correlation between the sensor’s response and the temperature (
Figure 8a), and presents the sensor’s response versus measured accelerations (
Figure 8b). Here, the following observations were drawn:
There was a significant signal variation in the sensor’s response under the F1 condition, with changes of up to 50%. This is a stark contrast to the F0 state, where the sensor’s response primarily fluctuated with temperature changes.
The most notable variations in the sensor’s response occurred during vehicle turns. This suggests that the sensor’s performance is heavily influenced by the movement and distribution of the remaining oil in the container.
When the vehicle was inactive or in a static state, the sensor readings appeared to revert to what would be expected in the faultless state (F0). This indicates that the sensor’s performance is dependent on the oil coverage over the sensing region.
During the vehicle’s turns, the altered distribution of the limited remaining oil caused the POF sensor to be intermittently exposed to air, as it was no longer fully submerged. This exposure led to the observed signal variations.
The sensor’s readings returned to baseline levels when the vehicle was stationary, implying that the oil resettled over the sensor, reestablishing conditions akin to the faultless state.
The dataset demonstrating the water intrusion fault (F2) is illustrated in
Figure 9, focusing on the response of the sensor in relation to measured temperature (
Figure 9a) and accelerations (
Figure 9b). This particular dataset spans a relatively short time horizon of only 42 min, a duration chosen to provide a higher-resolution view of the sensor’s response in the presence of an oil–water emulsion, a condition resulting from the water intrusion fault, especially during the varying accelerations caused by the vehicle’s movements. Key observations from this example F2 dataset include the following:
A noticeable signal variation of up to 20% was observed, which is less pronounced compared to the signal variation seen in the oil leakage fault scenario (F1). This difference is attributed to the distinct refractive indices the sensor encountered due to the presence of water droplets in the oil.
The sensor registered exposure to water droplets consistently during the vehicle’s movements, irrespective of specific maneuvers like turns. This suggests that the movement of the vehicle was crucial in dispersing and revealing the presence of water droplets within the system, leading to detectable variations in the sensor’s response.
The lack of forced circulation in the system (due to the absence of a pump, for instance) meant that the vehicle’s movement was essential for demonstrating the presence of water droplets, especially with the low fault magnitudes used in the test.
After the vehicle came to a stop, the signal variation caused by the water droplets remained evident for a certain duration until the water settled. Once settled, the system appeared to revert to a faultless state, misleadingly indicating the absence of a fault.
The volume of the water intrusion in these tests was not enough to continually cover the sensing area, highlighting a significant challenge in early-stage water intrusion detection. If the vehicle remains stationary and the intruded water volume is minimal, the fault might not be detected, as the water fails to consistently engage the sensor.
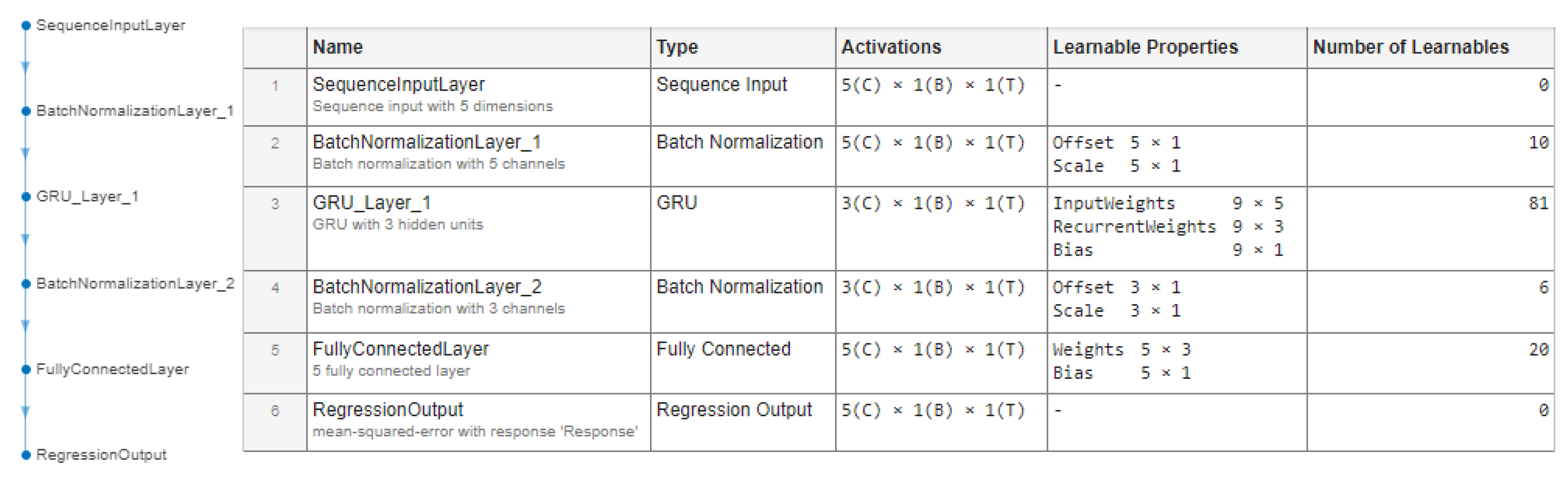
3.5. RAE-GRU Fault Detection Method
The proposed fault detection method utilizes a recurrent autoencoder–gated recurrent unit (RAE-GRU) neural network (
Figure 10).
The key advantages of the RAE-GRU method include reduced complexity and retention of modeling capabilities. GRU layers, as employed in the RAE-GRU network, are less complex than LSTM layers. This reduced complexity directly translates to lower computational and memory demands, making the RAE-GRU approach more feasible for implementing embedded systems with constrained resources. Despite its reduced complexity, the RAE-GRU method retains the ability to model long-term dependencies in time-series data. This is a critical feature for accurately tracking and detecting anomalies or faults over extended periods.
The proposed method begins with the processing of the output vector signal, denoted as
. This signal serves as the input for the RAE-GRU model:
where
l denotes the number of samples prior to the most recent sample.
Upon processing the input signal sequence, the autoencoder within the RAE-GRU model generates a reconstructed output signal sequence. This is denoted as
. The objective here is for the autoencoder to learn an efficient representation (encoding) of the input data, and then use this representation to reconstruct the output as closely as possible to the original input.
After reconstructing the output signal, the method proceeds by calculating the residuals,
. These are obtained by determining the difference between the reconstructed output signal,
, and the original input signal,
. They are then compared against predetermined upper and lower thresholds, denoted as
and
, respectively. These thresholds are established based on a statistical analysis of the residuals, incorporating the mean value of the residuals,
, the standard deviation of the residuals,
, and a selected significance level,
, which sets the sensitivity of the fault detection process:
where
and
are derived from the data collected under the faultless state.
To generate the threshold-crossing indicator,
, specific conditions are applied to the residuals. The conditions for generating
can be described as follows:
To generate the final diagnostic signal,
, the method utilizes the sum of the threshold-crossing indicators,
, over a predefined time window, denoted as
. This step determines whether the observed deviations, as indicated by the threshold crossings, are sustained and significant enough to be considered a fault (by exceeding
). The process can be outlined as follows:
The diagnostic signal is the final output of the fault detection process, indicating the presence of a potential fault in the system. Although out of the scope of this research paper, the signal could be used to initiate further diagnostic procedures or take corrective actions as part of the system’s overall maintenance and safety protocols.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}