

Research on Comprehensive Vehicle Information Detection Technology Based on Single-Point Laser Ranging


Abstract
1. Introduction
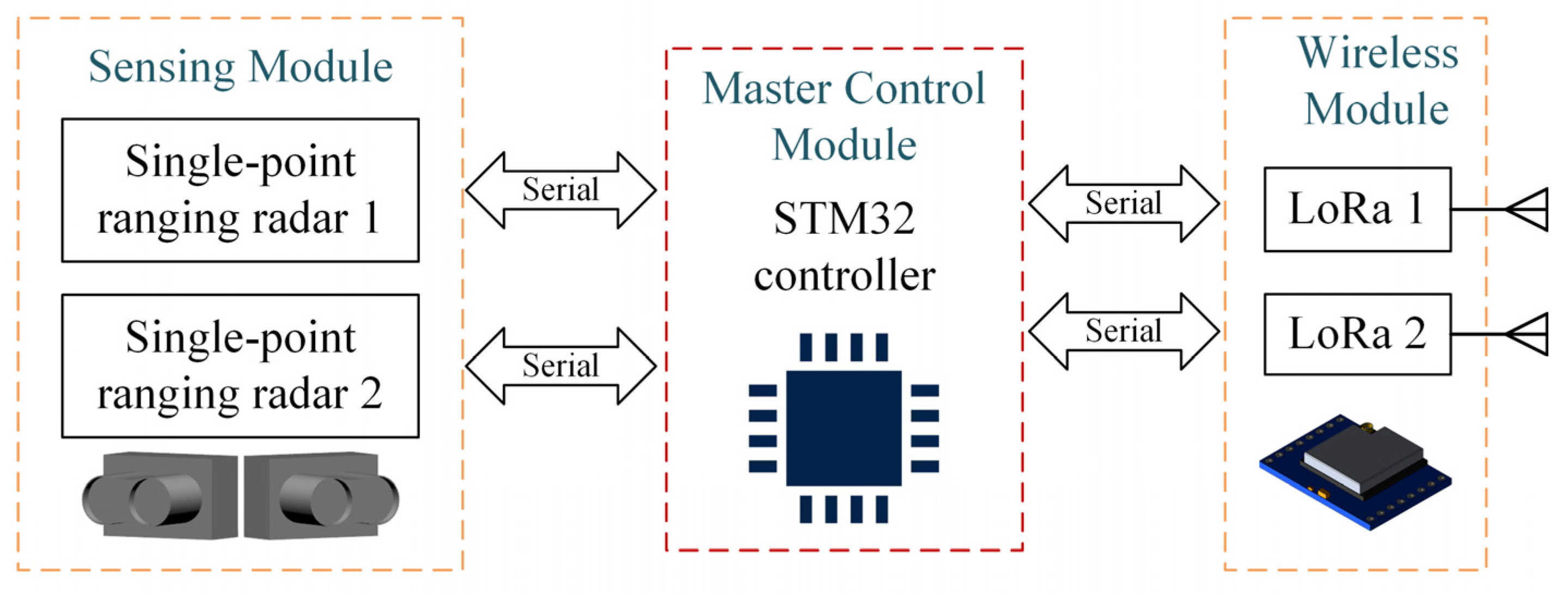
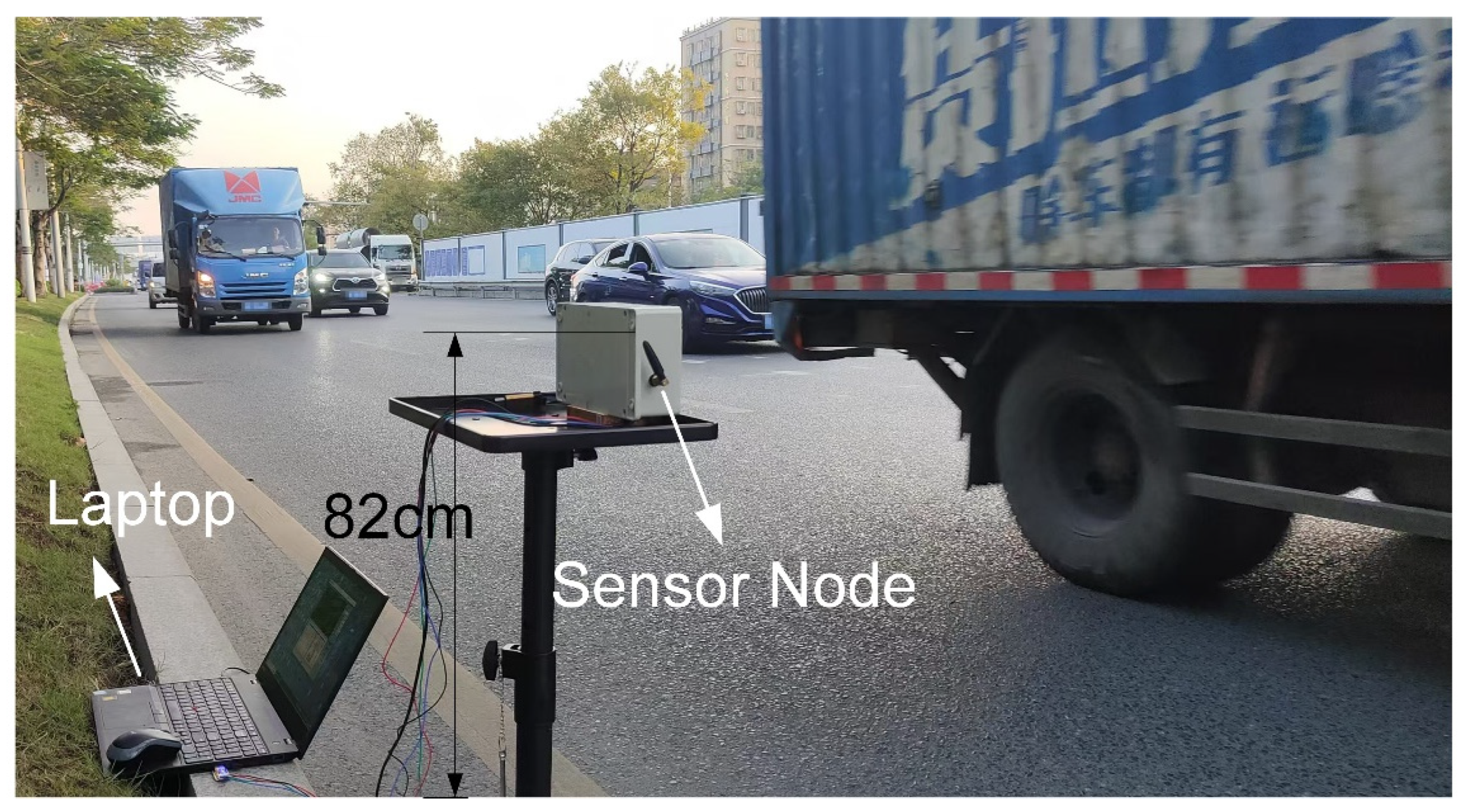
2. System Description
3. Vehicle Detection
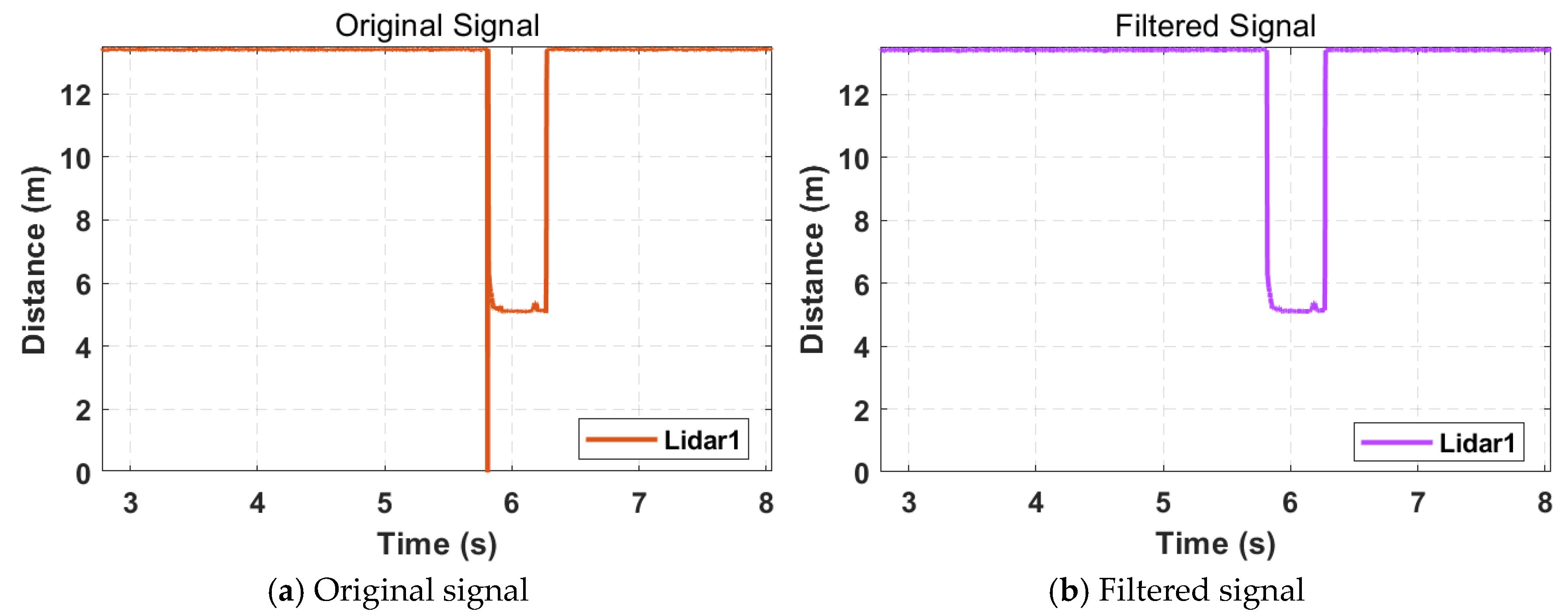
3.1. Signal Acquisition and Preprocessing
3.2. Vehicle Detection Algorithm
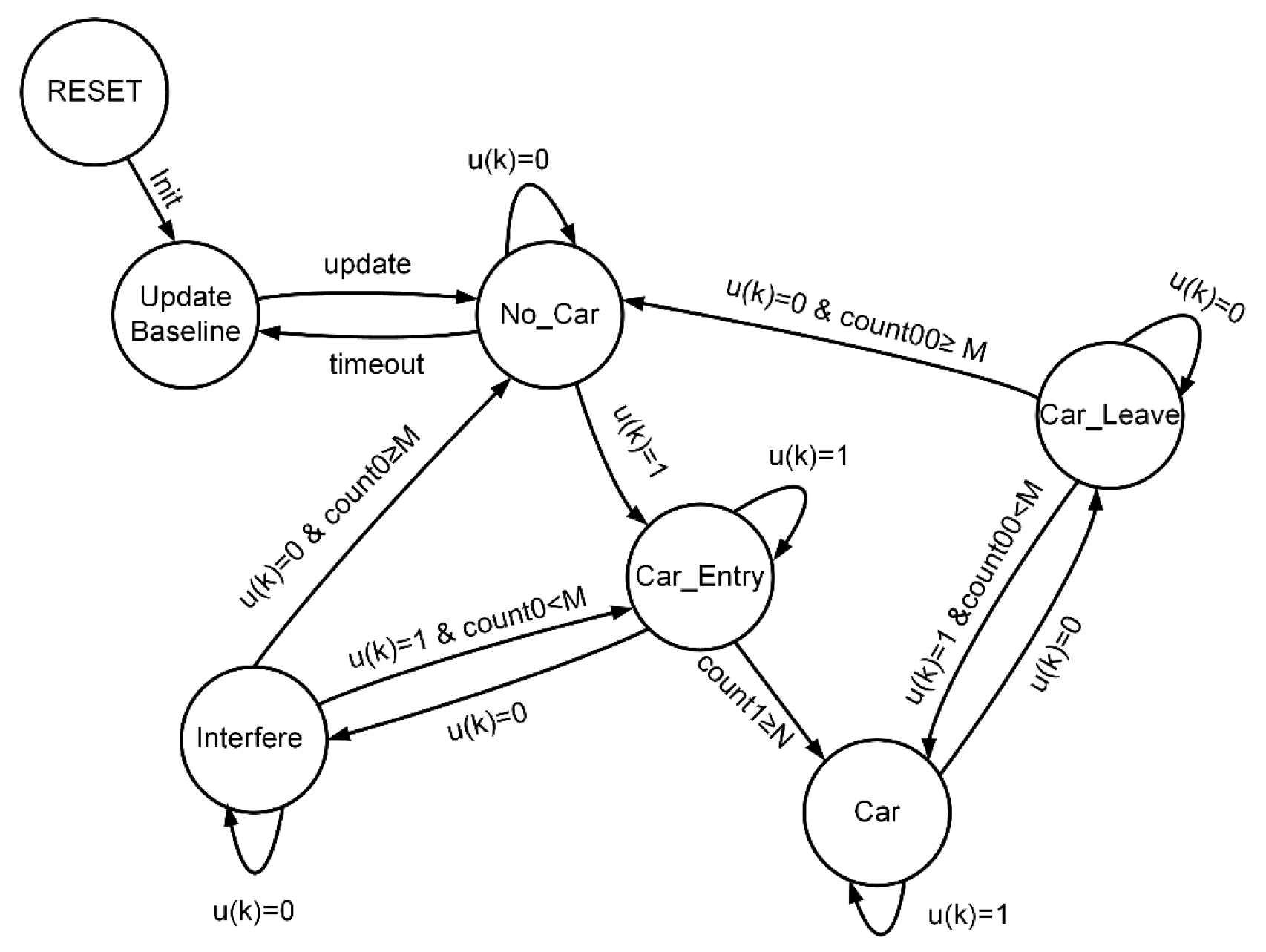
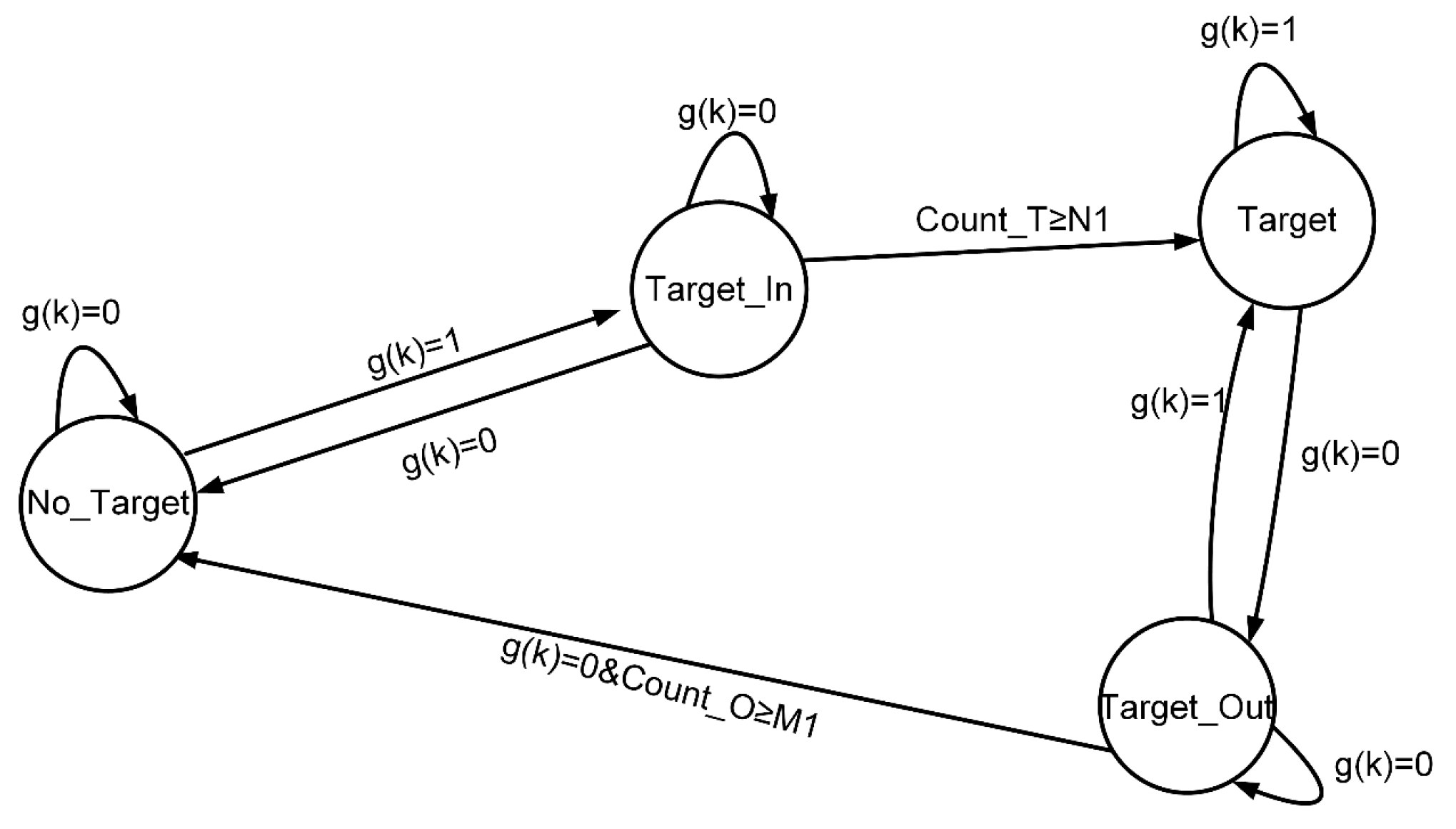
3.2.1. Adaptive Threshold State Machine
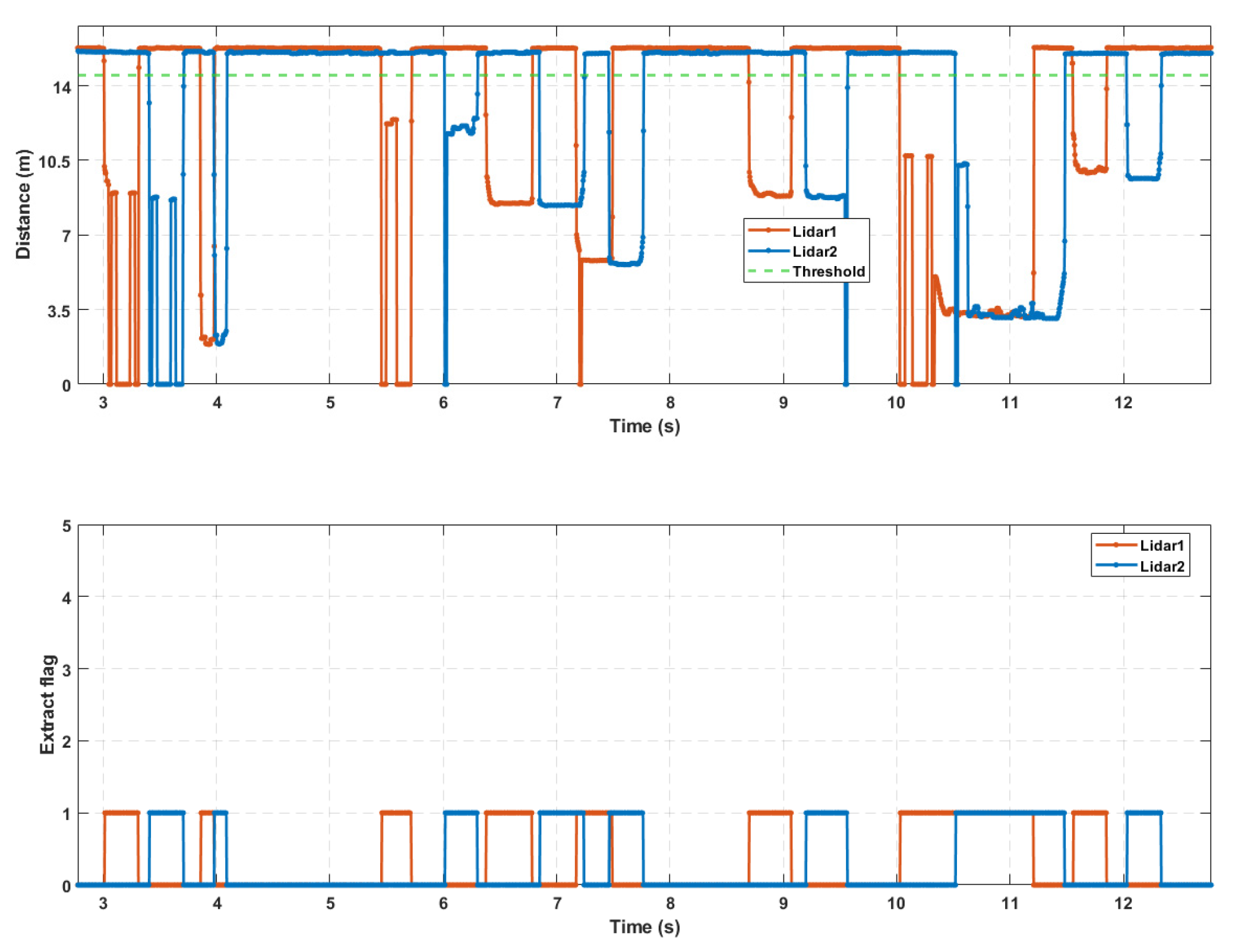
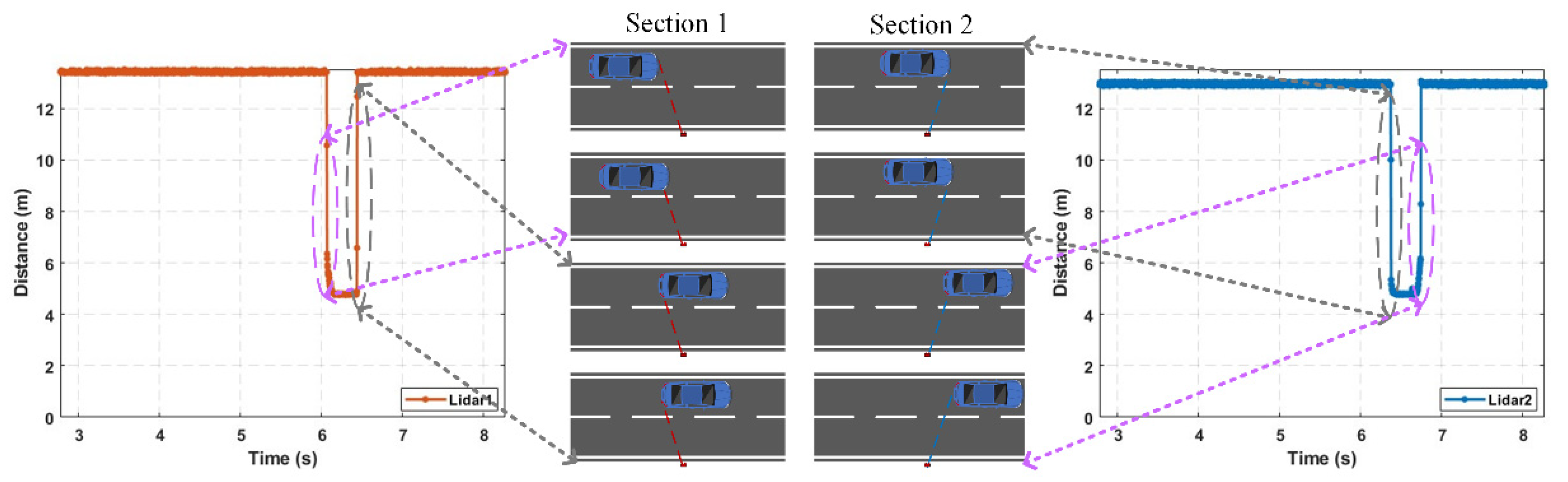
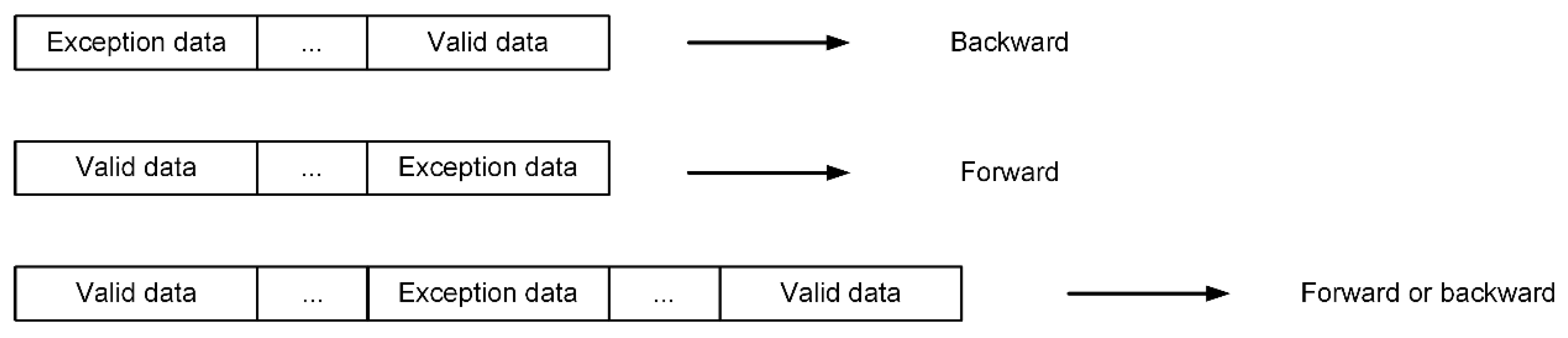
3.2.2. Segmentation and Fusion Processing
| Algorithm 1. Valid data segment fusion and partitioning algorithm |
| Input: valid_data_segments, start_indexs, end_indexs Output: cars_list, front_edges, back_edges, occ_type_list 1. for each data segment i: 2. if cars_list is empty: 3. create a new car segment 4. else: 5. let j be the last car segment, and l be the second-to-last segment (if it exists) 6. if the minimum difference between segment i and segment l < and time difference < : 7. fuse with segment l 8. else if the minimum difference between segment i and segment j < and time difference < : 9. fuse with segment j 10. else if the time difference < : 11. mark as occlusion 12. else: 13. create a new car segment End |
3.2.3. Vehicle Motion Parameter Estimation
4. Experiments and Result Analysis
4.1. Subsection
4.2. High-Traffic Road Section
5. Discussion
6. Conclusions
6.1. Achievements and Limitations
6.2. Future Research Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Karpiriski, M.; Senart, A.; Cahill, V. Sensor networks for smart roads. In Proceedings of the Fourth Annual IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOMW’06), Pisa, Italy, 13–17 March 2006; IEEE: New York, NY, USA, 2006; Volume 5, p. 310. [Google Scholar]
- Cheung, S.-Y.; Varaiya, P.P. Traffic Surveillance by Wireless Sensor Networks: Final Report; University of California: Berkeley, CA, USA, 2007. [Google Scholar]
- Padmavathi, G.; Shanmugapriya, D.; Kalaivani, M. A study on vehicle detection and tracking using wireless sensor networks. Wirel. Sens. Netw. 2010, 2, 173. [Google Scholar] [CrossRef]
- Azimjonov, J.; Özmen, A. A real-time vehicle detection and a novel vehicle tracking systems for estimating and monitoring traffic flow on highways. Adv. Eng. Inform. 2021, 50, 101393. [Google Scholar] [CrossRef]
- Lei, M.; Yang, D.; Weng, X. Integrated sensor fusion based on 4D MIMO radar and camera: A solution for connected vehicle applications. IEEE Veh. Technol. Mag. 2022, 17, 38–46. [Google Scholar] [CrossRef]
- Li, S.; Yoon, H.S. Sensor fusion-based vehicle detection and tracking using a single camera and radar at a traffic intersection. Sensors 2023, 23, 4888. [Google Scholar] [CrossRef]
- Oladimeji, D.; Gupta, K.; Kose, N.A.; Gundogan, K.; Ge, L.; Liang, F. Smart transportation: An overview of technologies and applications. Sensors 2023, 23, 3880. [Google Scholar] [CrossRef]
- Guerrero-Ibáñez, J.; Zeadally, S.; Contreras-Castillo, J. Sensor technologies for intelligent transportation systems. Sensors 2018, 18, 1212. [Google Scholar] [CrossRef] [PubMed]
- Tasgaonkar, P.P.; Garg, R.D.; Garg, P.K. Vehicle detection and traffic estimation with sensors technologies for intelligent transportation systems. Sens. Imaging 2020, 21, 29. [Google Scholar] [CrossRef]
- Chi, Y.D.; Yuan, D.; Yang, X.T. Introduction to intelligent transportation vehicle detector. Appl. Mech. Mater. 2014, 496, 1369–1372. [Google Scholar] [CrossRef]
- Sun, C.; Ritchie, S.G. Individual vehicle speed estimation using single loop inductive waveforms. J. Transp. Eng. 1999, 125, 531–538. [Google Scholar] [CrossRef]
- Ki, Y.K.; Baik, D.-K. Vehicle-classification algorithm for single-loop detectors using neural networks. IEEE Trans. Veh. Technol. 2006, 55, 1704–1711. [Google Scholar] [CrossRef]
- Gajda, J.; Stencel, M. A highly selective vehicle classification utilizing dual-loop inductive detector. Metrol. Meas. Syst. 2014, 21, 473–484. [Google Scholar] [CrossRef]
- Cheung, S.Y.; Coleri, S.; Dundar, B.; Ganesh, S.; Tan, C.-W.; Varaiya, P. Traffic measurement and vehicle classification with single magnetic sensor. Transp. Res. Rec. J. Transp. Res. Board 2005, 1917, 173–181. [Google Scholar] [CrossRef]
- Keawkamnerd, S.; Chinrungrueng, J.; Jaruchart, C. Vehicle classification with low computation magnetic sensor. In Proceedings of the 2008 8th International Conference on ITS Telecommunications, Phuket, Thailand, 24 October 2008; pp. 164–169. [Google Scholar]
- Wang, Q.; Zheng, J.; Xu, H.; Xu, B.; Chen, R. Roadside magnetic sensor system for vehicle detection in urban environments. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1365–1374. [Google Scholar] [CrossRef]
- Feng, Y.; Mao, G.; Cheng, B.; Li, C.; Hui, Y.; Xu, Z.; Chen, J. MagMonitor: Vehicle speed estimation and vehicle classification through a magnetic sensor. IEEE Trans. Intell. Transp. Syst. 2020, 23, 1311–1322. [Google Scholar] [CrossRef]
- Yang, B.; Lei, Y. Vehicle detection and classification for low-speed congested traffic with anisotropic magnetoresistive sensor. IEEE Sensors J. 2015, 15, 1132–1138. [Google Scholar] [CrossRef]
- Jo, Y.; Jung, I. Analysis of vehicle detection with WSN-based ultrasonic sensors. Sensors 2014, 14, 14050–14069. [Google Scholar] [CrossRef]
- Stiawan, R.; Kusumadjati, A.; Aminah, N.S.; Djamal, M.; Viridi, S. An ultrasonic sensor system for vehicle detection application. J. Phys. Conf. Ser. 2019, 1204, 012017. [Google Scholar] [CrossRef]
- Odat, E.; Shamma, J.S.; Claudel, C. Vehicle classification and speed estimation using combined passive infrared/ultrasonic sensors. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1593–1606. [Google Scholar] [CrossRef]
- Teoh, S.S.; Bräunl, T. Symmetry-based monocular vehicle detection system. Mach. Vis. Appl. 2012, 23, 831–842. [Google Scholar] [CrossRef]
- Luvizon, D.C.; Nassu, B.T.; Minetto, R. A video-based system for vehicle speed measurement in urban roadways. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1393–1404. [Google Scholar] [CrossRef]
- Sang, J.; Wu, Z.; Guo, P.; Hu, H.; Xiang, H.; Zhang, Q.; Cai, B. An improved YOLOv2 for vehicle detection. Sensors 2018, 18, 4272. [Google Scholar] [CrossRef] [PubMed]
- Dai, Z.; Song, H.; Wang, X.; Fang, Y.; Yun, X.; Zhang, Z.; Li, H. Video-based vehicle counting framework. IEEE Access 2019, 7, 64460–64470. [Google Scholar] [CrossRef]
- Song, H.; Liang, H.; Li, H.; Dai, Z.; Yun, X. Vision-based vehicle detection and counting system using deep learning in highway scenes. Eur. Transp. Res. Rev. 2019, 11, 1–16. [Google Scholar] [CrossRef]
- Zhao, J.; Xu, H.; Liu, H.; Wu, J.; Zheng, Y.; Wu, D. Detection and tracking of pedestrians and vehicles using roadside LiDAR sensors. Transp. Res. Part C Emerg. Technol. 2019, 100, 68–87. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, J.; Xu, H.; Wang, X. Vehicle detection and tracking in complex traffic circumstances with roadside LiDAR. Transp. Res. Rec. 2019, 2673, 62–71. [Google Scholar] [CrossRef]
- Zhang, J.; Xiao, W.; Coifman, B.; Mills, J.P. Vehicle tracking and speed estimation from roadside lidar. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5597–5608. [Google Scholar] [CrossRef]
- Cui, Y.; Xu, H.; Wu, J.; Sun, Y.; Zhao, J. Automatic vehicle tracking with roadside LiDAR data for the connected-vehicles system. IEEE Intell. Syst. 2019, 34, 44–51. [Google Scholar] [CrossRef]
- Qian, K.; Zhu, S.; Zhang, X.; Li, L.E. Robust multimodal vehicle detection in foggy weather using complementary lidar and radar signals. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 444–453. [Google Scholar]
- Fitch, J.P.; Coyle, E.; Gallagher, N. Median filtering by threshold decomposition. IEEE Trans. Acoust. Speech Signal Process. 1984, 32, 1183–1188. [Google Scholar] [CrossRef]
- Xiao, B.; Xia, J.; Li, X.; Gao, Q. An Improved Vehicle Detection Algorithm Based on Multi-Intermediate State Machine. Math. Probl. Eng. 2021, 2021, 5540837. [Google Scholar] [CrossRef]
- Krajewski, R.; Bock, J.; Kloeker, L.; Eckstein, L. The highd dataset: A drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems. In Proceedings of the 2018 21st international conference on intelligent transportation systems (ITSC), Maui, HI, USA, 4–7 November 2018; IEEE: New York, NY, USA, 2018; pp. 2118–2125. [Google Scholar]
- Zhang, H.; Wen, X.; Chen, H.-Y.; Huang, S.-C. Vehicle trajectory holographic perception method based on laser range sensors. J. Jilin Univ. Eng. Technol. Ed. 2024, 54, 2378–2384. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detection Technology Types | Detection Indicators and Performance | Detection Range | Deployment Cost | Installation Method | |
|---|---|---|---|---|---|
| Coverage | Lane Count | ||||
| Inductive loop detection |
| ▲ | 1 | Low | Buried installation |
| Geomagnetic detection |
| ▲ | 1 | Low | Buried installation |
| Ultrasonic detection |
| 8–20 m | 1 | Medium | Pavement installation |
| Video detection |
| * | * | High | Pavement installation or roadside installation |
| LiDAR detection |
| ≤180 m | ≤8 | High | Pavement installation or roadside installation |
| Dual single-point laser radar detection (this study) |
| ▲ | ≥1 | Low | Roadside installation |
| Occlusion-Type Assemble | |
|---|---|
| {0, 0}/{0, 1}/{1, 1} | |
| {0, 2}/{2, 2} | |
| {1, 2} | Unable to be calculated |
| {3, -} | Unable to be calculated |
| Parameter | Symbol | Value |
|---|---|---|
| The angle between two laser ranging radars | ||
| Sensor node installation distance | - | |
| Baseline update threshold | ||
| Vehicle detection threshold | ||
| Vehicle entry counter critical value | ||
| Vehicle leave counter critical value | ||
| Valid data segment fusion threshold | ||
| Time gap critical value | ||
| Time gap critical value |
| Low-Traffic Road | |||
|---|---|---|---|
| Observation Results | Detection Results | Correct % | |
| Vehicle count | 91 | 92 | 98.9 |
| Vehicles with speed | 91 | 100 | |
| Vehicles with length | 91 | 100 | |
| Lane identification | 92 | 98.9 | |
| Max Error % | Min Error % | Average Error % | |
| Speed error | 0.102 | 0.001 | 0.040 |
| Parameter | Symbol | Value |
|---|---|---|
| The angle between two laser ranging radars | ||
| Sensor node installation distance | - | |
| Baseline update threshold | ||
| Vehicle detection threshold | ||
| Vehicle entry counter critical value | ||
| Vehicle leave counter critical value | ||
| Valid data segment fusion threshold | ||
| Time gap critical value | ||
| Time gap critical value |
| High-Traffic Road (Actual Measurement) | |||
|---|---|---|---|
| Observation Results | Detection Results | Correct % | |
| Vehicle count | 337 | 329 | 97.6 |
| Vehicles with speed | 319 | 94.7 | |
| Vehicles with length | 307 | 91.1 | |
| Lane identification | 325 | 98.7 | |
| High-Traffic Road (Simulation Measurement) | |||
|---|---|---|---|
| Observation Results | Detection Results | Correct % | |
| Vehicle count | 306 | 295 | 96.4 |
| Vehicles with speed | 288 | 94.1 | |
| Vehicles with length | 280 | 91.5 | |
| Lane identification | 295 | 96.4 | |
| Max Error % | Min Error % | Average Error % | |
| Speed error | 0.055 | 0.001 | 0.011 |
| Length error | 0.154 | 0.001 | 0.036 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Wen, X.; Liu, Y.; Zhang, H. Research on Comprehensive Vehicle Information Detection Technology Based on Single-Point Laser Ranging. Sensors 2025, 25, 1303. https://doi.org/10.3390/s25051303
Chen H, Wen X, Liu Y, Zhang H. Research on Comprehensive Vehicle Information Detection Technology Based on Single-Point Laser Ranging. Sensors. 2025; 25(5):1303. https://doi.org/10.3390/s25051303
Chicago/Turabian StyleChen, Haiyu, Xin Wen, Yunbo Liu, and Hui Zhang. 2025. "Research on Comprehensive Vehicle Information Detection Technology Based on Single-Point Laser Ranging" Sensors 25, no. 5: 1303. https://doi.org/10.3390/s25051303
APA StyleChen, H., Wen, X., Liu, Y., & Zhang, H. (2025). Research on Comprehensive Vehicle Information Detection Technology Based on Single-Point Laser Ranging. Sensors, 25(5), 1303. https://doi.org/10.3390/s25051303