
Federated Learning Framework for Real-Time Activity and Context Monitoring Using Edge Devices


Abstract
1. Introduction
- Multi-Sensor Data Integration: The system combines activity recognition, location tracking, and altitude detection using smartphone IMU sensors for real-time elderly monitoring.
- Federated Learning for Activity Recognition: Federated learning with FedAvg enhances activity recognition accuracy without centralizing raw data.
- Real-Time Elderly Tracking: The system provides the real-time monitoring of location, altitude, and context, enabling rapid emergency response.
- Scalable and Non-Intrusive Solution: The use of smartphones as edge devices offers a scalable, non-intrusive monitoring system for elderly care.
2. Related Work
2.1. Activity Recognition Using Smartphone Sensors
2.2. Federated Learning in Elderly Monitoring
2.3. Location Tracking for Elderly Care
2.4. Altitude Detection for Multi-Level Tracking
2.5. Existing Integrated Systems and Limitations
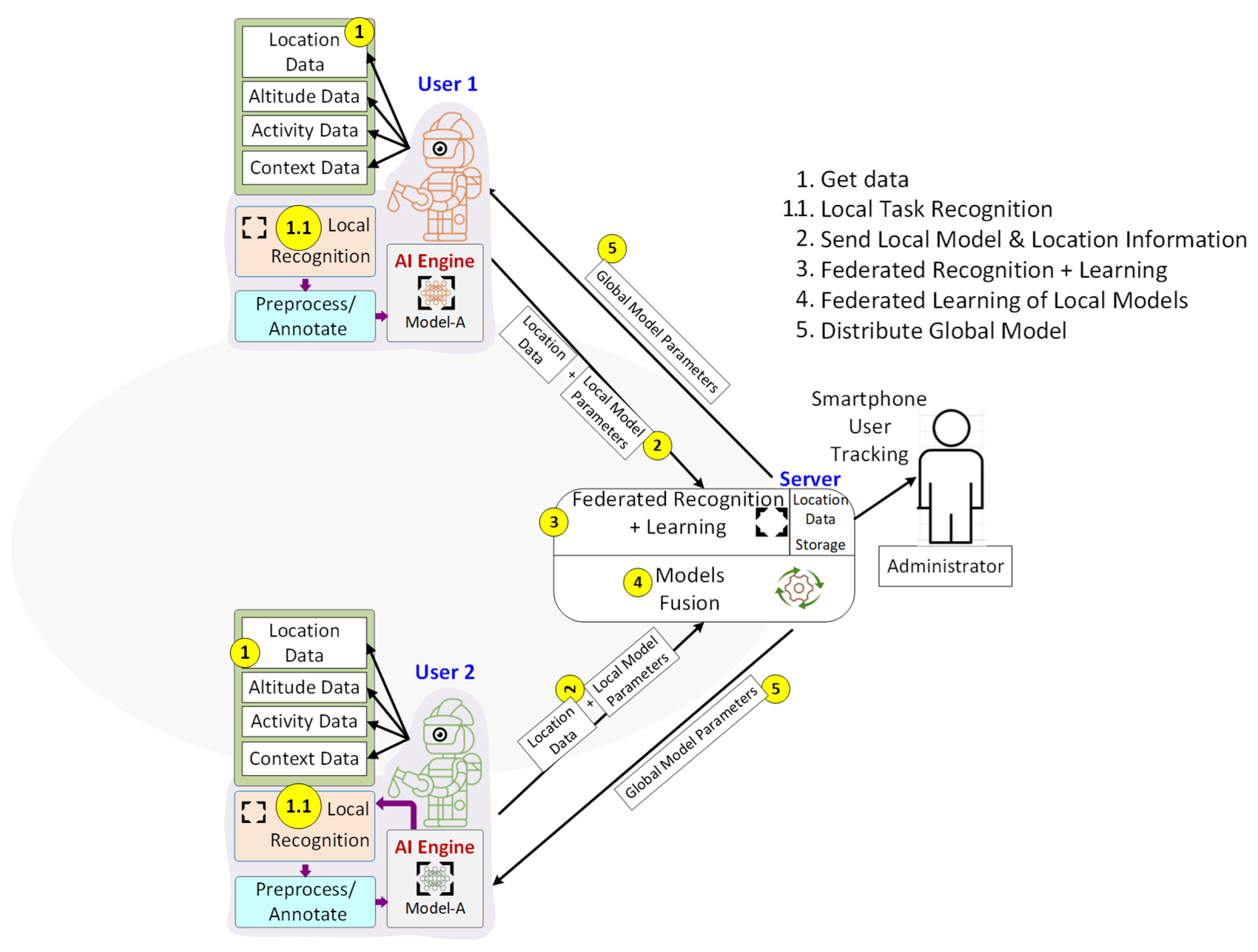
3. Federated Learning-Based Elderly Monitoring System Using Smartphone Sensors
3.1. Edge Device Data Collection
3.2. Activity Recognition
3.3. Location Tracking
- is the previous position;
- is velocity estimated from accelerometer readings;
- is the time interval;
- is the corrected orientation angle.
3.4. Altitude Detection
- h is the altitude (m);
- is the standard temperature at sea level (K);
- L is the temperature lapse rate (K/m);
- P is the measured atmospheric pressure (Pa);
- is the sea-level standard atmospheric pressure (101,325 Pa);
- R is the specific gas constant for dry air (287.05 J/(kg·K));
- g is the gravitational acceleration (9.80665 m/s2).
3.5. Contextual Information
- Variance ()—identifies movement intensity:
- Root mean square (RMS)—measures the movement magnitude:
- Skewness—detects asymmetric movement patterns:
- Correlation—measures directional consistency:
- Magnetic Field Magnitude—captures environmental changes:
3.5.1. Local Model Training
3.5.2. Preprocessing
- Mean: represents the average activity level within the window.
- Standard deviation: measures the variability in movement.
- Skewness: indicates the asymmetry in the distribution of values.
- Entropy: quantifies the complexity of movement patterns.
3.5.3. Local Model Training
| Algorithm 1 Federated learning system: edge device to server communication |
| Input: Sensor data from accelerometer, gyroscope, magnetometer, and barometer on each edge device. Output: Updated model parameters, user location, altitude, and contextual information sent to the federated server.
|
3.6. Federated Learning Process
3.7. Global Model Fusion and Distribution
3.8. Continuous Monitoring and Adaptation
3.8.1. Real-Time Activity Recognition
3.8.2. Emergency Alerts and Location Tracking
3.8.3. Adaptive Model Updates
| Algorithm 2 Federated learning system for continuous monitoring and activity recognition |
| Input: Data on each edge device , learning rate , number of local epochs E, number of global rounds T, compression factor , communication threshold Output: Global model
|
4. Experimental Results and Discussion
4.1. Development Environment
4.1.1. Hardware Environment
4.1.2. Software Environment
4.2. Implementation
4.3. Model Compression and Communication Efficiency
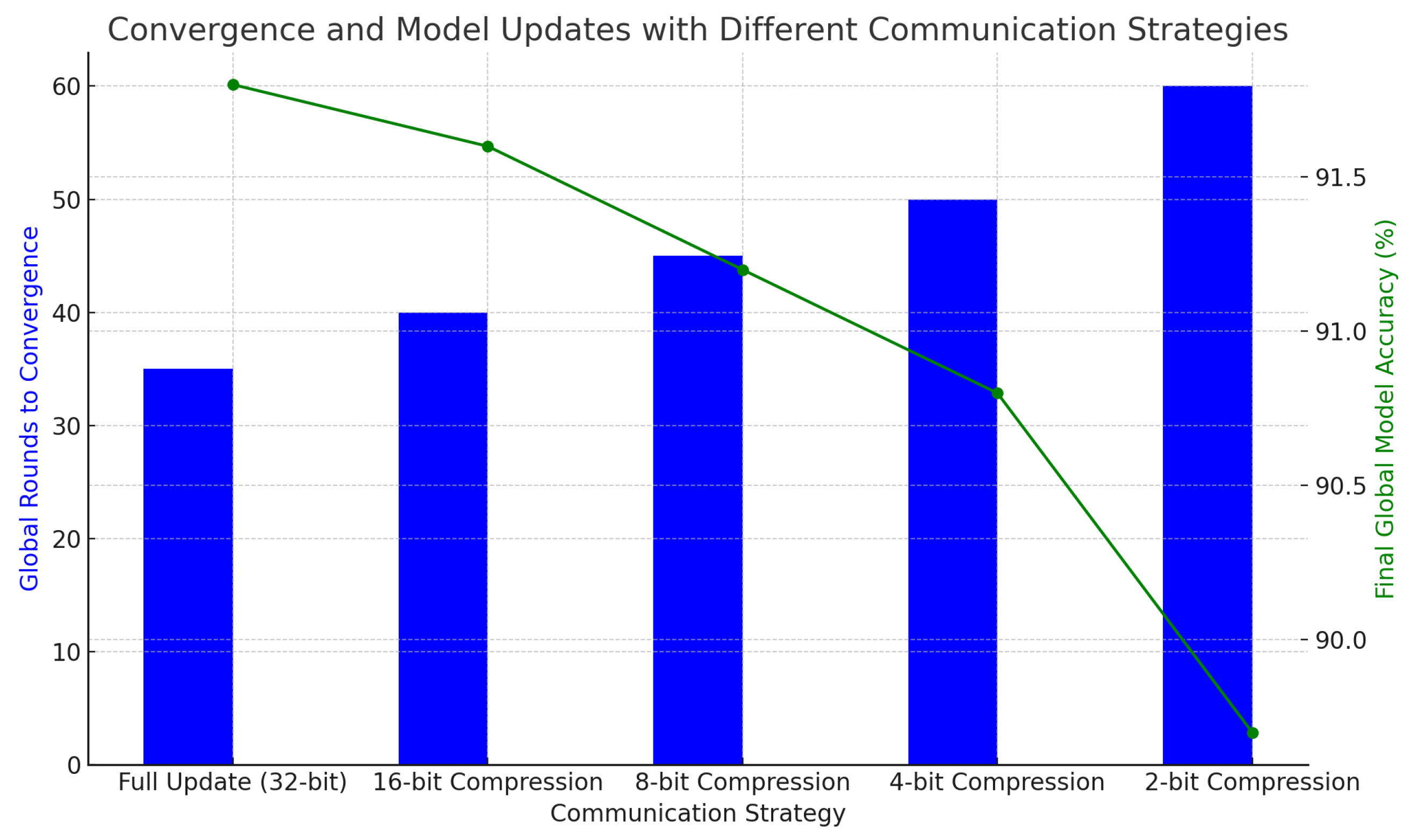
4.4. Convergence and Communication Strategies
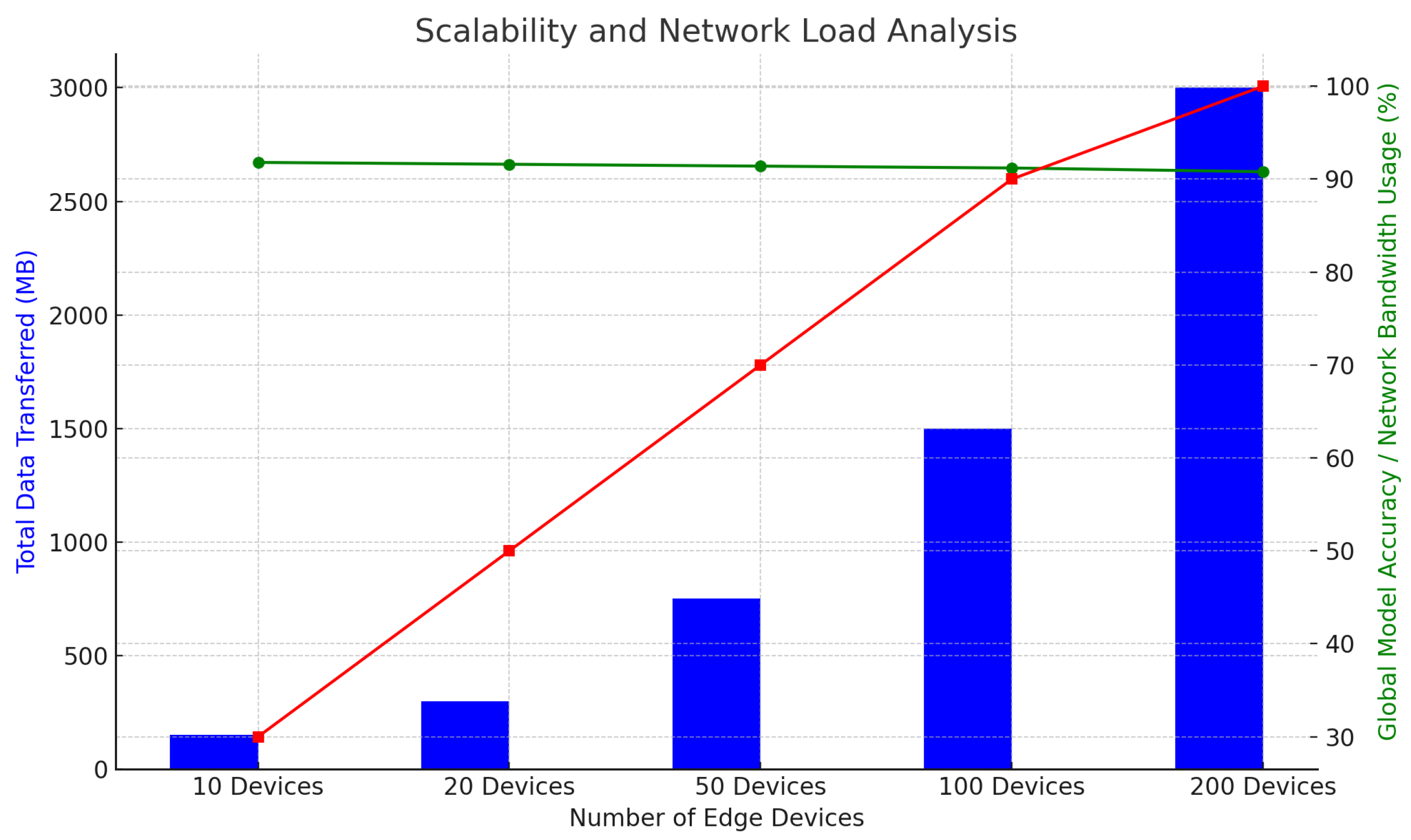
4.5. Scalability and Network Load Analysis
5. Conclusions and Future Direction
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ometov, A.; Shubina, V.; Klus, L.; Skibińska, J.; Saafi, S.; Pascacio, P.; Flueratoru, L.; Gaibor, D.Q.; Chukhno, N.; Chukhno, O.; et al. A Survey on Wearable Technology: History, State-of-the-Art and Current Challenges. Comput. Netw. 2021, 193, 108074. [Google Scholar] [CrossRef]
- Subedi, S.; Pyun, J.Y. A Survey of Smartphone-Based Indoor Positioning System Using RF-Based Wireless Technologies. Sensors 2020, 20, 7230. [Google Scholar] [CrossRef] [PubMed]
- Yang, D.; Zhu, T.; Wang, S.; Wang, S.; Xiong, Z. LFRSNet: A Robust Light Field Semantic Segmentation Network Combining Contextual and Geometric Features. Front. Environ. Sci. 2022, 10, 1443. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. Global Positioning System: Theory and Practice; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Sun, G.; Liao, D.; Zhao, D.; Xu, Z.; Yu, H. Live Migration for Multiple Correlated Virtual Machines in Cloud-Based Data Centers. IEEE Trans. Serv. Comput. 2018, 11, 279–291. [Google Scholar] [CrossRef]
- Catania, P.; Comparetti, A.; Febo, P.; Morello, G.; Orlando, S.; Roma, E.; Vallone, M. Positioning Accuracy Comparison of GNSS Receivers Used for Mapping and Guidance of Agricultural Machines. Agronomy 2020, 10, 924. [Google Scholar] [CrossRef]
- Roberts, C.M. Radio frequency identification (RFID). Comput. Secur. 2006, 25, 18–26. [Google Scholar] [CrossRef]
- Rong, Y.; Xu, Z.; Liu, J.; Liu, H.; Ding, J.; Liu, X.; Gao, J. Du-Bus: A Realtime Bus Waiting Time Estimation System Based On Multi-Source Data. IEEE Trans. Intell. Transp. Syst. 2022, 23, 24524–24539. [Google Scholar] [CrossRef]
- Zhao, H.; Yan, Y.; Shi, X. A dynamic localization network for regional navigation under global navigation satellite system denial environments. Int. J. Distrib. Sens. Netw. 2019, 15, 155014771983442. [Google Scholar] [CrossRef]
- Ijaz, F.; Yang, H.K.; Ahmad, A.W.; Lee, C. Indoor positioning: A review of indoor ultrasonic positioning systems. In Proceedings of the 2013 15th International Conference on Advanced Communications Technology (ICACT), Pyeongchang, Republic of Korea, 27–30 January 2013; pp. 1146–1150. [Google Scholar]
- Fard, H.K.; Chen, Y.; Son, K.K. Indoor positioning of mobile devices with agile iBeacon deployment. In Proceedings of the 2015 IEEE 28th Canadian Conference on Electrical and Computer Engineering (CCECE), Halifax, NS, Canada, 3–6 May 2015; pp. 275–279. [Google Scholar] [CrossRef]
- Zuo, C.; Zhang, X.; Yan, L.; Zhang, Z. GUGEN: Global User Graph Enhanced Network for Next POI Recommendation. IEEE Trans. Mob. Comput. 2024, 23, 14975–14986. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Wang, P.; Song, W.; Qi, H.; Zhou, C.; Li, F.; Wang, Y.; Zhang, Q. Server-Initiated Federated Unlearning to Eliminate Impacts of Low-Quality Data. IEEE Trans. Serv. Comput. 2024, 17, 1196–1211. [Google Scholar] [CrossRef]
- Xu, G.; Kong, D.; Zhang, K.; Xu, S.; Cao, Y.; Mao, Y.; Chen, X. A Model Value Transfer Incentive Mechanism for Federated Learning With Smart Contracts in AIoT. IEEE Internet Things J. 2024, 12, 2530–2544. [Google Scholar] [CrossRef]
- Li, H.; Xia, C.; Wang, T.; Wang, Z.; Cui, P.; Li, X. GRASS: Learning Spatial-Temporal Properties From Chainlike Cascade Data for Microscopic Diffusion Prediction. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 16313–16327. [Google Scholar] [CrossRef]
- Lin, L.; Liu, J.; Huang, N.; Li, S.; Zhang, Y. Multiscale Spatio-Temporal Feature Fusion Based Non-Intrusive Appliance Load Monitoring for Multiple Industrial Industries. Appl. Soft Comput. 2024, 167, 112445. [Google Scholar] [CrossRef]
- Lin, L.; Ma, X.; Chen, C.; Xu, J.; Huang, N. Imbalanced Industrial Load Identification Based on Optimized CatBoost with Entropy Features. J. Electr. Eng. Technol. 2024, 19, 4817–4832. [Google Scholar] [CrossRef]
- Jian Yin, L. A New Distance Vector-Hop Localization Algorithm Based on Half-Measure Weighted Centroid. Mob. Inf. Syst. 2019, 2019, e9892512. [Google Scholar] [CrossRef]
- Shi, Y.; Shi, W.; Liu, X.; Xiao, X. An RSSI Classification and Tracing Algorithm to Improve Trilateration-Based Positioning. Sensors 2020, 20, 4244. [Google Scholar] [CrossRef]
- Qiu, S.; Wang, Z.; Zhao, H.; Qin, K.; Li, Z.; Hu, H. Inertial/magnetic sensors based pedestrian dead reckoning by means of multi-sensor fusion. Inf. Fusion 2018, 39, 108–119. [Google Scholar] [CrossRef]
- Townsend, K.; Cufí, C.; Akiba; Davidson, R. Getting Started with Bluetooth Low Energy: Tools and Techniques for Low-Power Networking; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2014. [Google Scholar]
- Zuhdiyanto, D.R.O.; Asriningtias, Y. Real-Time Location Monitoring and Routine Reminders Based on Internet of Things Integrated with Mobile for Dementia Disorder. J. RESTI (Rekayasa Sist. Teknol. Inf.) 2025, 9, 77–84. [Google Scholar]
- Gkiolnta, E.; Roy, D.; Fragulis, G.F. Challenges and Ethical Considerations in Implementing Assistive Technologies in Healthcare. Technologies 2025, 13, 48. [Google Scholar] [CrossRef]
- Song, W.; Wang, X.; Zheng, S.; Li, S.; Hao, A.; Hou, X. TalkingStyle: Personalized Speech-Driven 3D Facial Animation with Style Preservation. IEEE Trans. Vis. Comput. Graph. 2024; early access. [Google Scholar] [CrossRef]
- Li, T.; Hui, S.; Zhang, S.; Wang, H.; Zhang, Y.; Hui, P.; Li, Y. Mobile User Traffic Generation Via Multi-Scale Hierarchical GAN. ACM Trans. Knowl. Discov. Data 2024, 18, 1–19. [Google Scholar] [CrossRef]
- Zhang, M.; Wei, E.; Berry, R.; Huang, J. Age-Dependent Differential Privacy. IEEE Trans. Inf. Theory 2024, 70, 1300–1319. [Google Scholar] [CrossRef]
- Wang, J.; Bai, L.; Fang, Z.; Han, R.; Wang, J.; Choi, J. Age of Information Based URLLC Transmission for UAVs on Pylon Turn. IEEE Trans. Veh. Technol. 2024, 73, 8797–8809. [Google Scholar] [CrossRef]
- Bai, L.; Han, P.; Wang, J.; Wang, J. Throughput Maximization for Multipath Secure Transmission in Wireless Ad-Hoc Networks. IEEE Trans. Commun. 2024, 72, 6810–6821. [Google Scholar] [CrossRef]
- Zhang, X.; Hou, D.; Xiong, Z.; Liu, Y.; Wang, S.; Li, Y. EALLR: Energy-Aware Low-Latency Routing Data Driven Model in Mobile Edge Computing. IEEE Trans. Consum. Electron. 2024; early access. [Google Scholar] [CrossRef]
- Song, W.; Wang, X.; Jiang, Y.; Li, S.; Hao, A.; Hou, X.; Qin, H. Expressive 3D Facial Animation Generation Based on Local-to-Global Latent Diffusion. IEEE Trans. Vis. Comput. Graph. 2024, 30, 7397–7407. [Google Scholar] [CrossRef]
- Zhu, C. Research on Emotion Recognition-Based Smart Assistant System: Emotional Intelligence and Personalized Services. J. Syst. Manag. Sci. 2023, 13, 227–242. [Google Scholar] [CrossRef]
- Liu, C.; Xie, K.; Wu, T.; Ma, C.; Ma, T. Distributed Neural Tensor Completion for Network Monitoring Data Recovery. Inf. Sci. 2024, 662, 120259. [Google Scholar] [CrossRef]
- Marques, J.P.P.; Cunha, D.C.; Harada, L.M.; Silva, L.N.; Silva, I.D. A cost-effective trilateration-based radio localization algorithm using machine learning and sequential least-square programming optimization. Comput. Commun. 2021, 177, 1–9. [Google Scholar] [CrossRef]
- Deng, X.; Zhang, Y.; Zhang, Y.; Qi, H. Toward Smart Multizone HVAC Control by Combining Context-Aware System and Deep Reinforcement Learning. IEEE Internet Things J. 2022, 9, 21010–21024. [Google Scholar] [CrossRef]
- Cheng, Q.; Chen, W.; Sun, R.; Wang, J.; Weng, D. RANSAC-based Instantaneous Real-Time Kinematic Positioning with GNSS Triple-Frequency Signals in Urban Areas. J. Geod. 2024, 98, 24. [Google Scholar] [CrossRef]
- Li, T.; Long, Q.; Chai, H.; Zhang, S.; Jiang, F.; Liu, H.; Li, Y. Generative AI Empowered Network Digital Twins: Architecture, Technologies, and Applications. ACM Comput. Surv. 2025, accepted. [Google Scholar] [CrossRef]
- Gu, X.; Chen, X.; Lu, P.; Lan, X.; Li, X.; Du, Y. SiMaLSTM-SNP: Novel Semantic Relatedness Learning Model Preserving Both Siamese Networks and Membrane Computing. J. Supercomput. 2024, 80, 3382–3411. [Google Scholar] [CrossRef]
- Ding, J.; Chen, X.; Lu, P.; Yang, Z.; Li, X.; Du, Y. DialogueINAB: An Interaction Neural Network Based on Attitudes and Behaviors of Interlocutors for Dialogue Emotion Recognition. J. Supercomput. 2023, 79, 20481–20514. [Google Scholar] [CrossRef]
- Jamil, F.; Kim, D. Enhanced Kalman filter algorithm using fuzzy inference for improving position estimation in indoor navigation. J. Intell. Fuzzy Syst. 2021, 40, 8991–9005. [Google Scholar] [CrossRef]
- Lan, K.C.; Shih, W.Y. On Calibrating the Sensor Errors of a PDR-Based Indoor Localization System. Sensors 2013, 13, 4781–4810. [Google Scholar] [CrossRef]
- Bao, H.; Wong, W.C. A Novel Map-Based Dead-Reckoning Algorithm for Indoor Localization. J. Sens. Actuator Netw. 2014, 3, 44–63. [Google Scholar] [CrossRef]
- Mikov, A.; Moschevikin, A.; Fedorov, A.; Sikora, A. A localization system using inertial measurement units from wireless commercial hand-held devices. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard, France, 28–31 October 2013; pp. 1–7. [Google Scholar] [CrossRef]
- Tian, Q.; Salcic, Z.; Wang, K.I.K.; Pan, Y. An enhanced pedestrian dead reckoning approach for pedestrian tracking using smartphones. In Proceedings of the 2015 IEEE Tenth International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP), Singapore, 7–9 April 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, R.; Xia, W.; Jia, Z.; Shen, L. The indoor localization method based on the integration of RSSI and inertial sensor. In Proceedings of the 2014 IEEE 3rd Global Conference on Consumer Electronics (GCCE), Tokyo, Japan, 7–10 October 2014; pp. 332–336. [Google Scholar] [CrossRef]
- Jimenez Ruiz, A.R.; Seco Granja, F.; Prieto Honorato, J.C.; Guevara Rosas, J.I. Accurate Pedestrian Indoor Navigation by Tightly Coupling Foot-Mounted IMU and RFID Measurements. IEEE Trans. Instrum. Meas. 2012, 61, 178–189. [Google Scholar] [CrossRef]
- Chirakkal, V.V.; Park, M.; Han, D.S. Exploring Smartphone-Based Indoor Navigation: A QR Code Assistance-Based Approach. IEIE Trans. Smart Process. Comput. 2015, 4, 173–182. [Google Scholar] [CrossRef]
- Meliones, A.; Sampson, D. Blind MuseumTourer: A System for Self-Guided Tours in Museums and Blind Indoor Navigation. Technologies 2018, 6, 4. [Google Scholar] [CrossRef]
- Zhou, Y.; Zheng, X.; Chen, R.; Xiong, H.; Guo, S. Image-Based Localization Aided Indoor Pedestrian Trajectory Estimation Using Smartphones. Sensors 2018, 18, 258. [Google Scholar] [CrossRef]
- Al-Madani, B.; Orujov, F.; Maskeliunas, R.; Damasevicius, R.; Venčkauskas, A. Fuzzy Logic Type-2 Based Wireless Indoor Localization System for Navigation of Visually Impaired People in Buildings. Sensors 2019, 19, 2114. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Ahmad, N.S. A Comprehensive Review on Sensor Fusion Techniques for Localization of a Dynamic Target in GPS-Denied Environments. IEEE Access 2024, 13, 2252–2285. [Google Scholar] [CrossRef]
- Skog, I.; Handel, P.; Nilsson, J.O.; Rantakokko, J. Zero-Velocity Detection—An Algorithm Evaluation. IEEE Trans. Biomed. Eng. 2010, 57, 2657–2666. [Google Scholar] [CrossRef]
- Nascimento, L.M.S.d.; Bonfati, L.V.; Freitas, M.L.B.; Mendes Junior, J.J.A.; Siqueira, H.V.; Stevan, S.L., Jr. Sensors and systems for physical rehabilitation and health monitoring—A review. Sensors 2020, 20, 4063. [Google Scholar] [CrossRef]
- Trabelsi, D.; Mohammed, S.; Chamroukhi, F.; Oukhellou, L.; Amirat, Y. An Unsupervised Approach for Automatic Activity Recognition Based on Hidden Markov Model Regression. IEEE Trans. Autom. Sci. Eng. 2013, 10, 829–835. [Google Scholar] [CrossRef]
- Seitz, J.; Vaupel, T.; Meyer, S.; Boronat, J.G.; Thielecke, J. A Hidden Markov Model for pedestrian navigation. In Proceedings of the Navigation and Communication 2010 7th Workshop on Positioning, Dresden, Germany, 11–12 March 2010; pp. 120–127. [Google Scholar] [CrossRef]
- Ryu, S.J.; Kim, J.H. Classification of long-term motions using a two-layered hidden Markov model in a wearable sensor system. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Phuket, Thailand, 7–11 December 2011; pp. 2975–2980. [Google Scholar] [CrossRef]
- Ahmad, N.; Han, L.; Iqbal, K.; Ahmad, R.; Abid, M.A.; Iqbal, N. SARM: Salah activities recognition model based on smartphone. Electronics 2019, 8, 881. [Google Scholar] [CrossRef]
- Ahmed, S.; Irfan, S.; Kiran, N.; Masood, N.; Anjum, N.; Ramzan, N. Remote health monitoring systems for elderly people: A survey. Sensors 2023, 23, 7095. [Google Scholar] [CrossRef]
- Aouedi, O.; Sacco, A.; Khan, L.U.; Nguyen, D.C.; Guizani, M. Federated Learning for Human Activity Recognition: Overview, Advances, and Challenges. IEEE Open J. Commun. Soc. 2024, 5, 7341–7367. [Google Scholar] [CrossRef]
- Horta-Velázquez, A.; Ramos-Ortiz, G.; Morales-Narváez, E. The optimal color space enables advantageous smartphone-based colorimetric sensing. Biosens. Bioelectron. 2025, 273, 117089. [Google Scholar] [CrossRef]
- Ngoupayou Limbepe, Z.; Gai, K.; Yu, J. Blockchain-Based Privacy-Enhancing Federated Learning in Smart Healthcare: A Survey. Blockchains 2025, 3, 1. [Google Scholar] [CrossRef]
- Jamil, F.; Kim, D.H. Improving Accuracy of the Alpha–Beta Filter Algorithm Using an ANN-Based Learning Mechanism in Indoor Navigation System. Sensors 2019, 19, 3946. [Google Scholar] [CrossRef] [PubMed]
- Jamil, F.; Iqbal, N.; Ahmad, S.; Kim, D.H. Toward Accurate Position Estimation Using Learning to Prediction Algorithm in Indoor Navigation. Sensors 2020, 20, 4410. [Google Scholar] [CrossRef] [PubMed]
- Jamil, H.; Qayyum, F.; Jamil, F.; Kim, D.H. Enhanced pdr-ble compensation mechanism based on hmm and awcla for improving indoor localization. Sensors 2021, 21, 6972. [Google Scholar] [CrossRef]
- Jamil, H.; Qayyum, F.; Iqbal, N.; Jamil, F.; Kim, D.H. Optimal ensemble scheme for human activity recognition and floor detection based on AutoML and weighted soft voting using smartphone sensors. IEEE Sens. J. 2022, 23, 2878–2890. [Google Scholar] [CrossRef]
- Jamil, H.; Kim, D.H. Optimal fusion-based localization method for tracking of smartphone user in tall complex buildings. CAAI Trans. Intell. Technol. 2023, 8, 1104–1123. [Google Scholar] [CrossRef]
- Jamil, H.; Jian, Y. An Evolutionary Enhance Particle Filter Based Fusion Localization Scheme For Fast Tracking Of Smartphone Users In Tall Complex Buildings For Hazardous Situations. IEEE Sens. J. 2024, 24, 6799–6812. [Google Scholar] [CrossRef]
- Jamil, H.; Khan, M.A.; Jamil, F. A novel hybrid strategy based on Swarm and Heterogeneous Federated Learning using model credibility awareness for activity recognition in cross-silo multistorey building. Eng. Appl. Artif. Intell. 2024, 138, 109126. [Google Scholar] [CrossRef]
- Jamil, H.; Jian, Y.; Jamil, F.; Ahmad, S. Swarm Learning Empowered Federated Deep Learning for Seamless Smartphone-Based Activity Recognition. IEEE Trans. Consum. Electron. 2024, 70, 6919–6935. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Technique | Environment | Max Distance | Error (m) | Achieved Accuracy |
|---|---|---|---|---|---|
| Gyro, Acc [41] | Zero velocity update, map matching | Sensor on waist | 40 m | 0.683 m | 98.26% |
| Mag, Acc [42] | PDR, map matching | Sensor in pocket | 104 m | (0.55–0.93) m | Ave LE (0.55–0.93 m) |
| Acc, Gyro [43] | Quaternion complementary filter | Smartphone in trousers/jacket/hand | 270 m | 0.529 m | Above 98% |
| IMU [62] | Learning-based prediction | NGIMU sensor on body | ∼50 m | 0.102 m | Above 98.7% |
| IMU [63] | ANN and KF prediction | Noisy sensor measurements | ∼50 m | 0.009 m | Above 99% |
| Acc, Gyro [44] | Model classification | Smartphone in hand/pocket while walking | 168.55 m | 0.31 m | Ave LE, 1.35 m |
| Acc, Gyro, Wi-Fi [45] | Zigbee RSSI fusion with EKF and PDR | Zigbee and IMU sensor on waist | 25 m | N/A | Max LE, 4 m |
| Acc, Gyro, Mag, RFI [46] | RFID RSSI fusion with EKF and PDR | IMU on foot, RFID tags in rooms | 1000 m | 0.721 m | Ave LE, 98.73% |
| Acc, Gyro [47] | Assistive QR code with PDR | QR codes along path, smartphone in hand | 35 m | N/A | Above 99% |
| IMU, BLE beacon [48] | BLE beacon, inertial dead reckoning | Indoor environment | 40 m | N/A | Above 97.47% |
| IMU, Camera [49] | PDR, camera-based tracking | Meeting room | 15 m | 0.56 m | N/A |
| BLE beacon [50] | Fuzzy logic, BLE fingerprinting | Indoor environment | 25 m | 0.43 m | N/A |
| Proposed Model | Federated Learning with IMU sensors | Smartphone-based monitoring | Dynamic | <0.1 m | Above 99% |
| Edge Device | Local Model Accuracy (%) | Global Model Accuracy After FedAvg (%) |
|---|---|---|
| Device 1 | 85.2 | 92.1 |
| Device 2 | 83.7 | 91.5 |
| Device 3 | 82.4 | 90.8 |
| Device 4 | 84.1 | 91.9 |
| Device 5 | 83.9 | 92.0 |
| Average | 83.9 | 91.7 |
| Global Round | Global Model Accuracy (%) |
|---|---|
| 1 | 70.4 |
| 5 | 78.9 |
| 10 | 83.5 |
| 15 | 85.7 |
| 20 | 87.6 |
| 25 | 89.0 |
| 30 | 90.2 |
| 35 | 91.1 |
| 40 | 91.5 |
| 45 | 91.6 |
| 50 | 91.7 |
| Activity Class | Precision (%) | Recall (%) | F1-Score (%) |
|---|---|---|---|
| Walking | 94.2 | 93.5 | 93.8 |
| Sitting | 90.1 | 91.0 | 90.5 |
| Running | 92.3 | 92.7 | 92.5 |
| Standing | 89.8 | 90.3 | 90.0 |
| Walking Upstairs | 91.5 | 92.0 | 91.7 |
| Walking Downstairs | 90.7 | 91.3 | 91.0 |
| Average | 91.4 | 91.8 | 91.6 |
| Scenario | Accuracy (%) | Response Time (s) | False Positive Rate (%) |
|---|---|---|---|
| Sudden Altitude Drop | 95.8 | 1.2 | 3.1 |
| Prolonged Inactivity | 94.3 | 1.5 | 2.8 |
| Combined Altitude Drop & Inactivity | 96.7 | 1.3 | 2.5 |
| Average | 95.6 | 1.3 | 2.8 |
| Compression Type | Total Data Transferred (MB) | Global Model Accuracy (%) | Reduction in Data Transferred (%) |
|---|---|---|---|
| No Compression (32-bit) | 1200 | 91.8 | 0 |
| 16-bit Compression | 600 | 91.6 | 50 |
| 8-bit Compression | 300 | 91.2 | 75 |
| 4-bit Compression | 150 | 90.8 | 87.5 |
| 2-bit Compression | 100 | 89.7 | 91.7 |
| Communication Strategy | Global Rounds to Convergence | Final Global Model Accuracy (%) |
|---|---|---|
| Full Update (32-bit) | 35 | 91.8 |
| 16-bit Compression | 40 | 91.6 |
| 8-bit Compression | 45 | 91.2 |
| 4-bit Compression | 50 | 90.8 |
| 2-bit Compression | 60 | 89.7 |
| Number of Edge Devices | Total Data Transferred (MB) | Global Model Accuracy (%) | Network Bandwidth Usage (%) |
|---|---|---|---|
| 10 Devices | 150 | 91.8 | 30 |
| 20 Devices | 300 | 91.6 | 50 |
| 50 Devices | 750 | 91.4 | 70 |
| 100 Devices | 1500 | 91.2 | 90 |
| 200 Devices | 3000 | 90.8 | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alharbey, R.A.; Jamil, F. Federated Learning Framework for Real-Time Activity and Context Monitoring Using Edge Devices. Sensors 2025, 25, 1266. https://doi.org/10.3390/s25041266
Alharbey RA, Jamil F. Federated Learning Framework for Real-Time Activity and Context Monitoring Using Edge Devices. Sensors. 2025; 25(4):1266. https://doi.org/10.3390/s25041266
Chicago/Turabian StyleAlharbey, Rania A., and Faisal Jamil. 2025. "Federated Learning Framework for Real-Time Activity and Context Monitoring Using Edge Devices" Sensors 25, no. 4: 1266. https://doi.org/10.3390/s25041266
APA StyleAlharbey, R. A., & Jamil, F. (2025). Federated Learning Framework for Real-Time Activity and Context Monitoring Using Edge Devices. Sensors, 25(4), 1266. https://doi.org/10.3390/s25041266