
Methodology to Validate the Radiated Immunity of Sophisticated Automotive Autonomous Systems †


Abstract
1. Introduction
2. Immunity Validation of ADASs, Complex, and Autonomous Systems (Traditional Methodology)
3. On-Vehicle Component Validation Methodology for Immunity of Complex Automotive Systems
3.1. Methodology Principle
3.2. Procedure to Validate the New Methodology
4. Representative Electronic/Electric (EE) Architecture Development
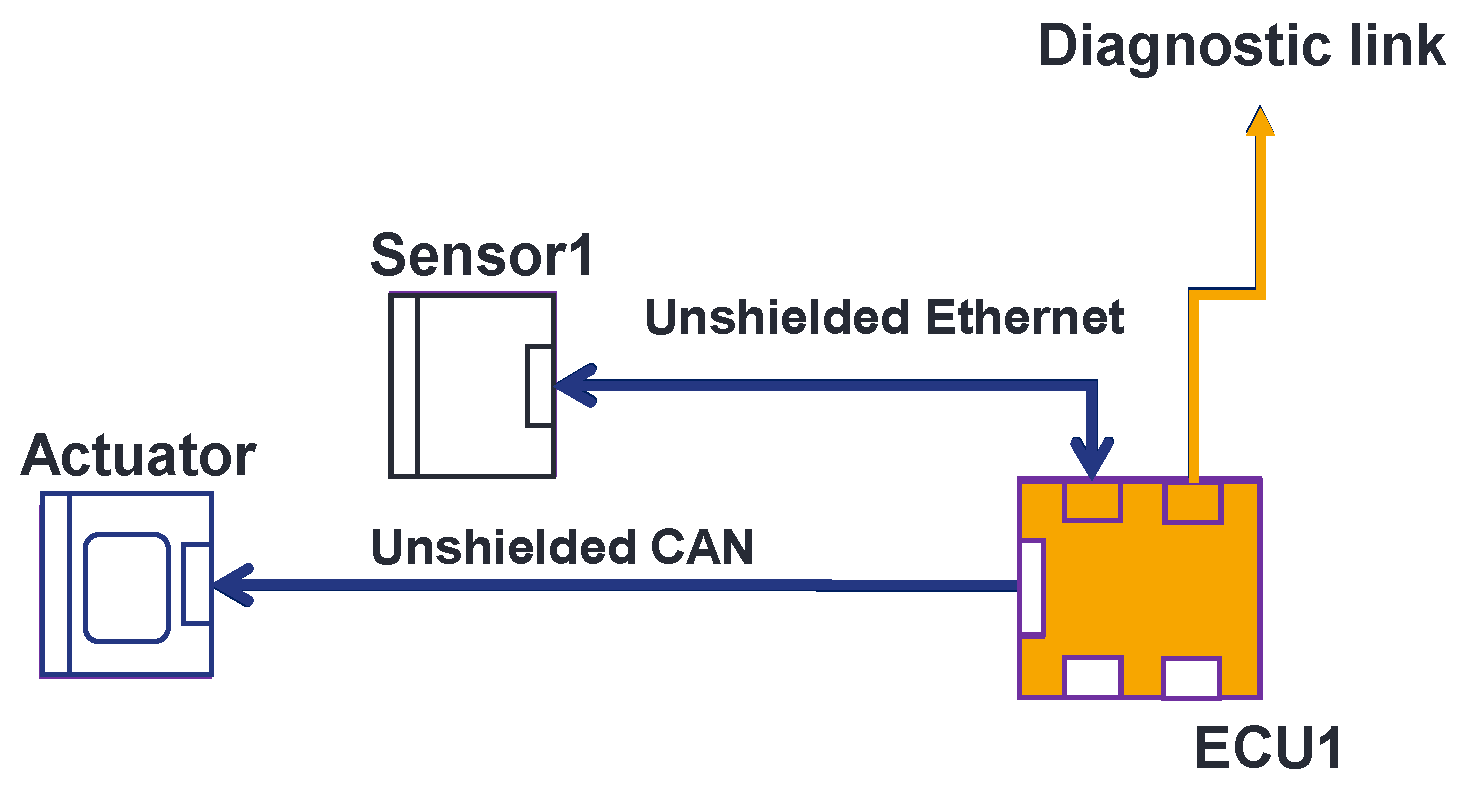
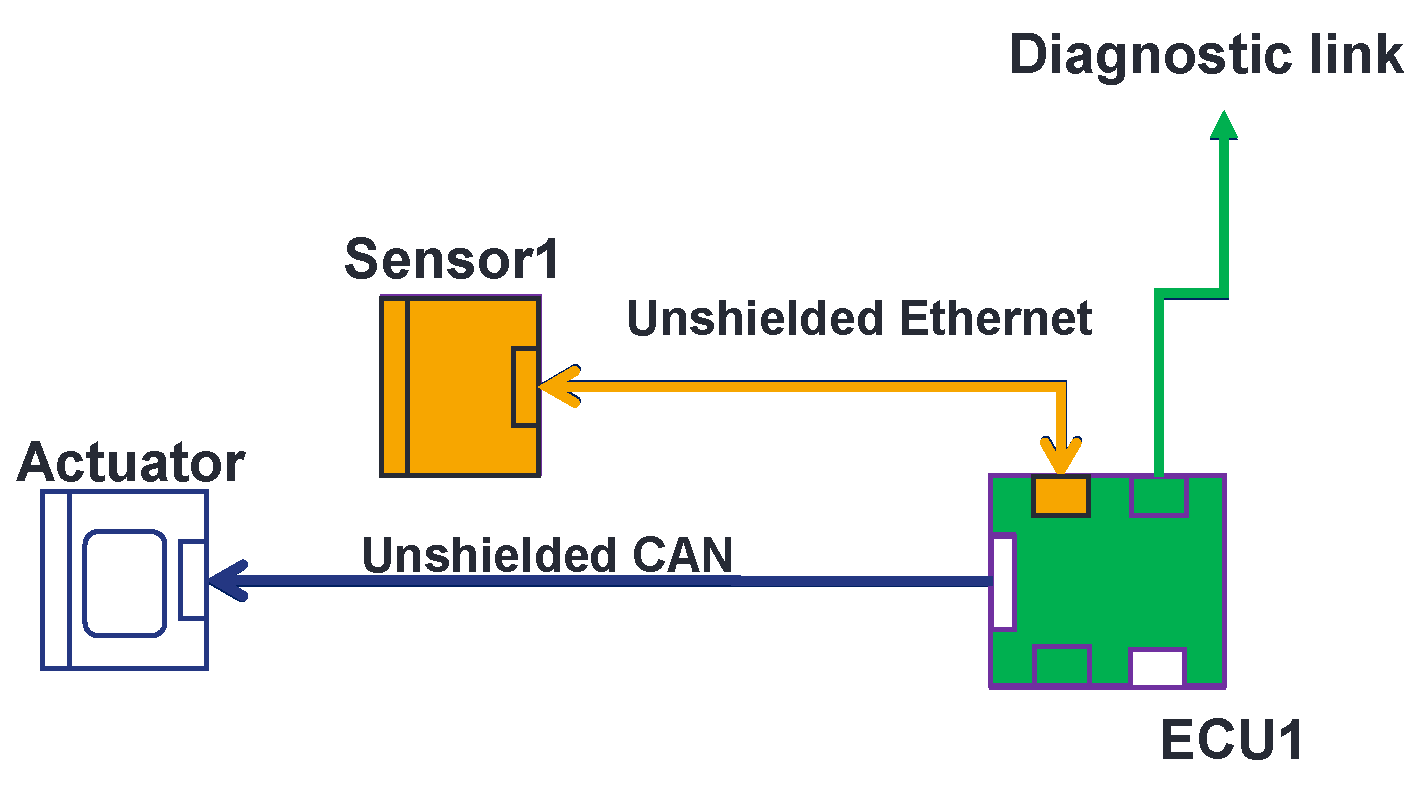
4.1. Electrical and Electronic (EE) Architecture Development
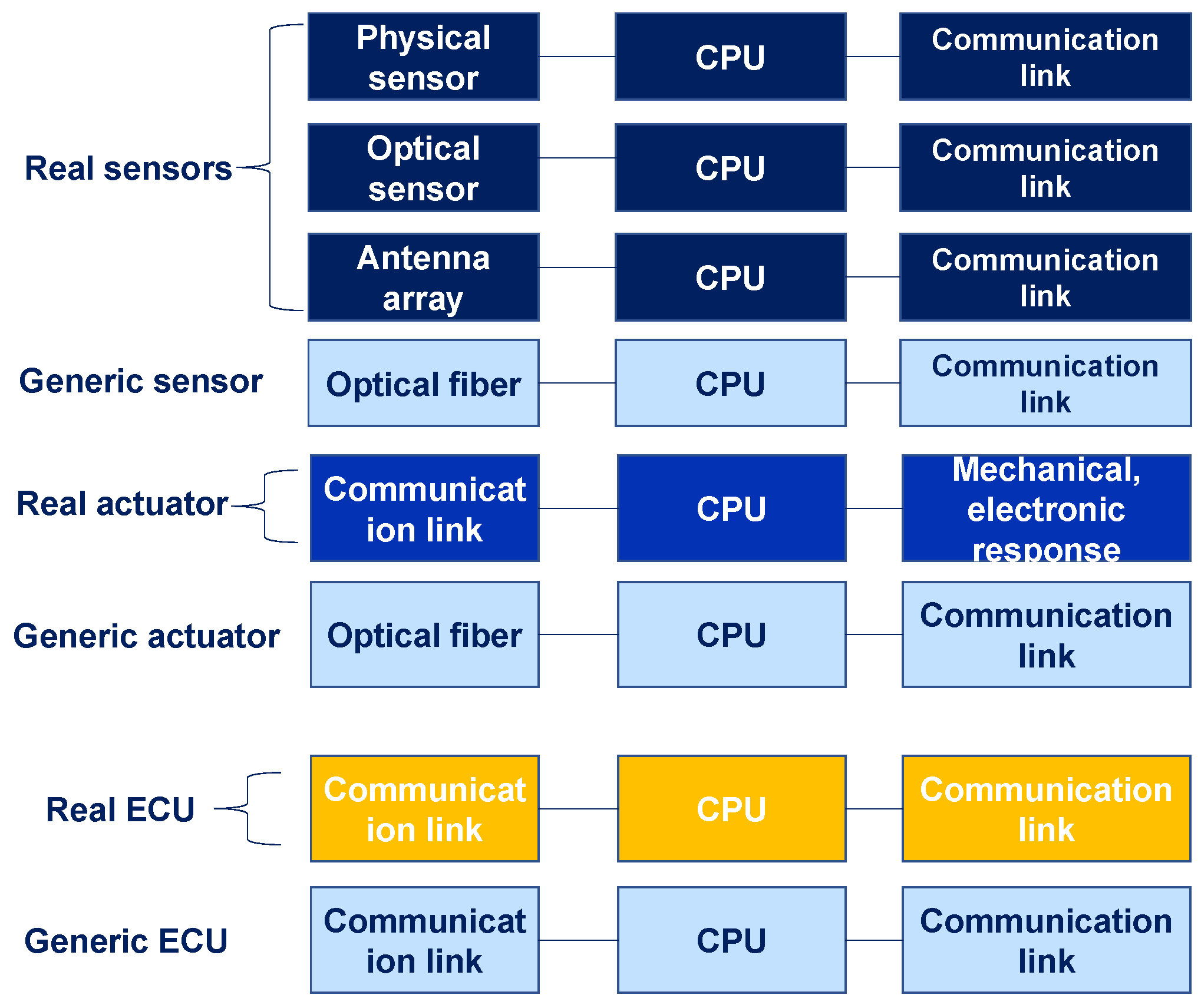
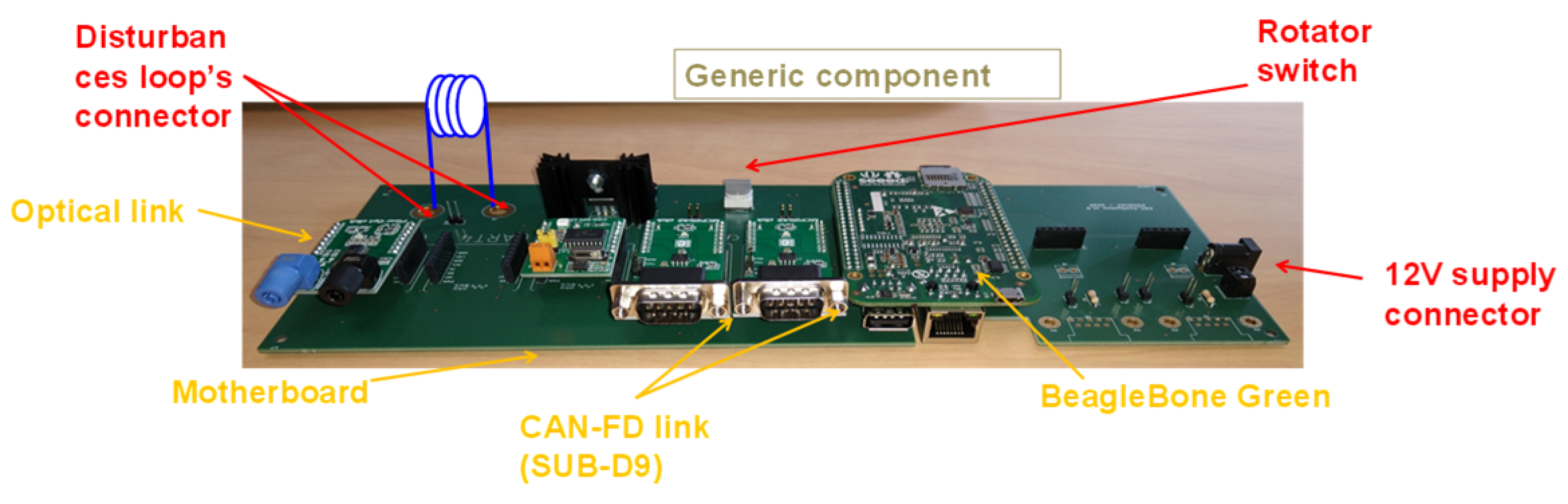
4.2. Electronic Architecture of Generic Components
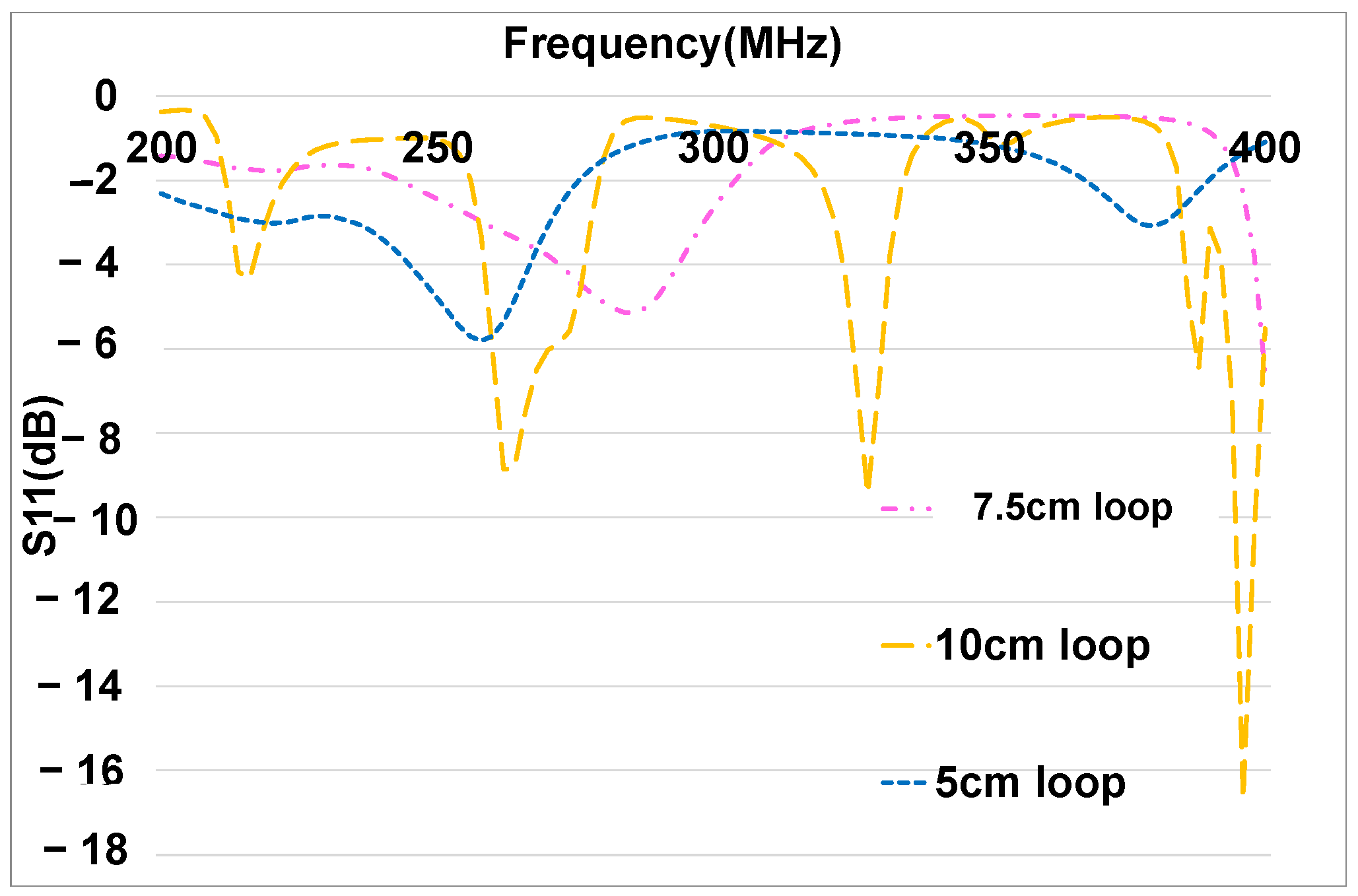
4.3. Optimization of Disturbance Loops (Disturbance Loop Modeling)
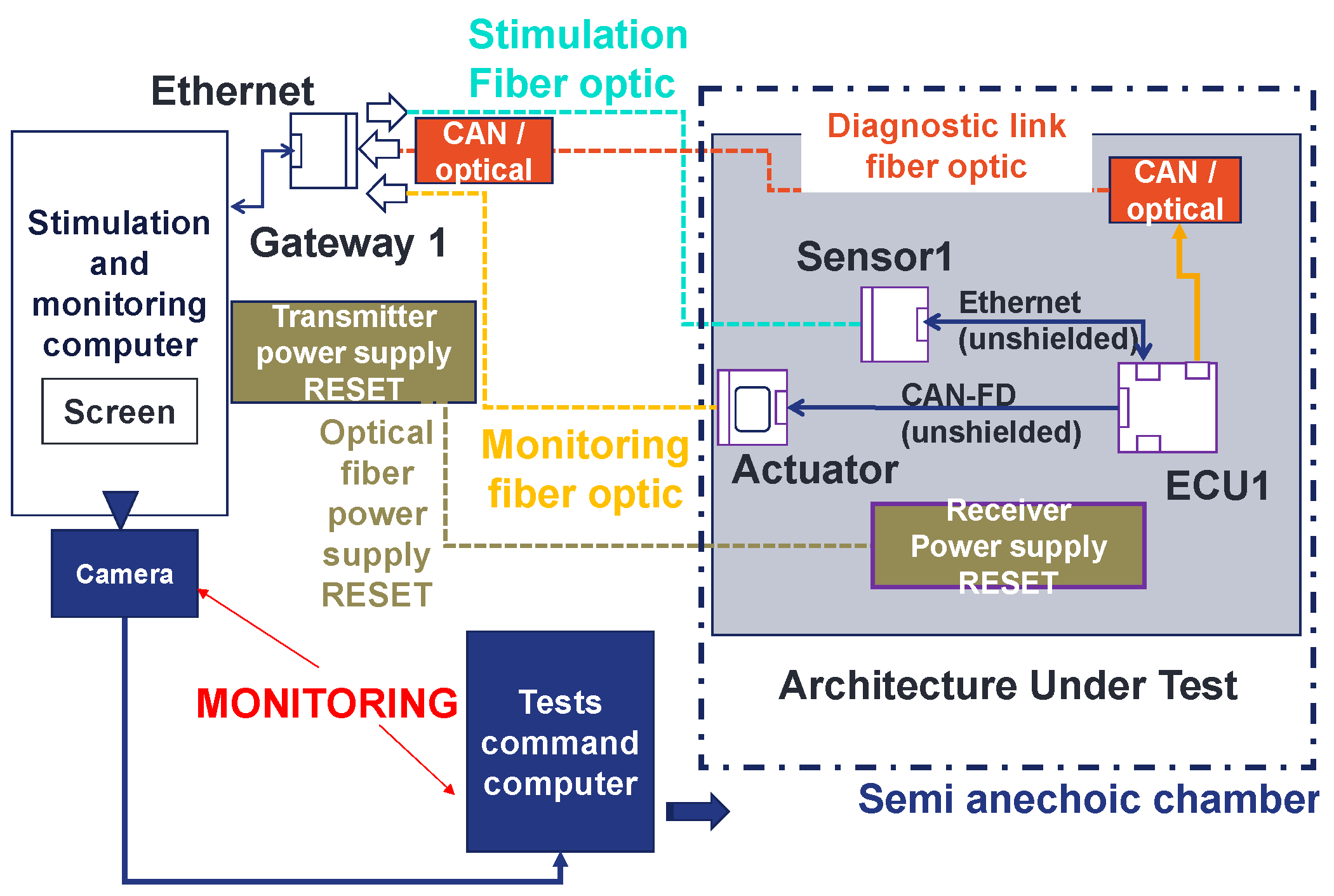
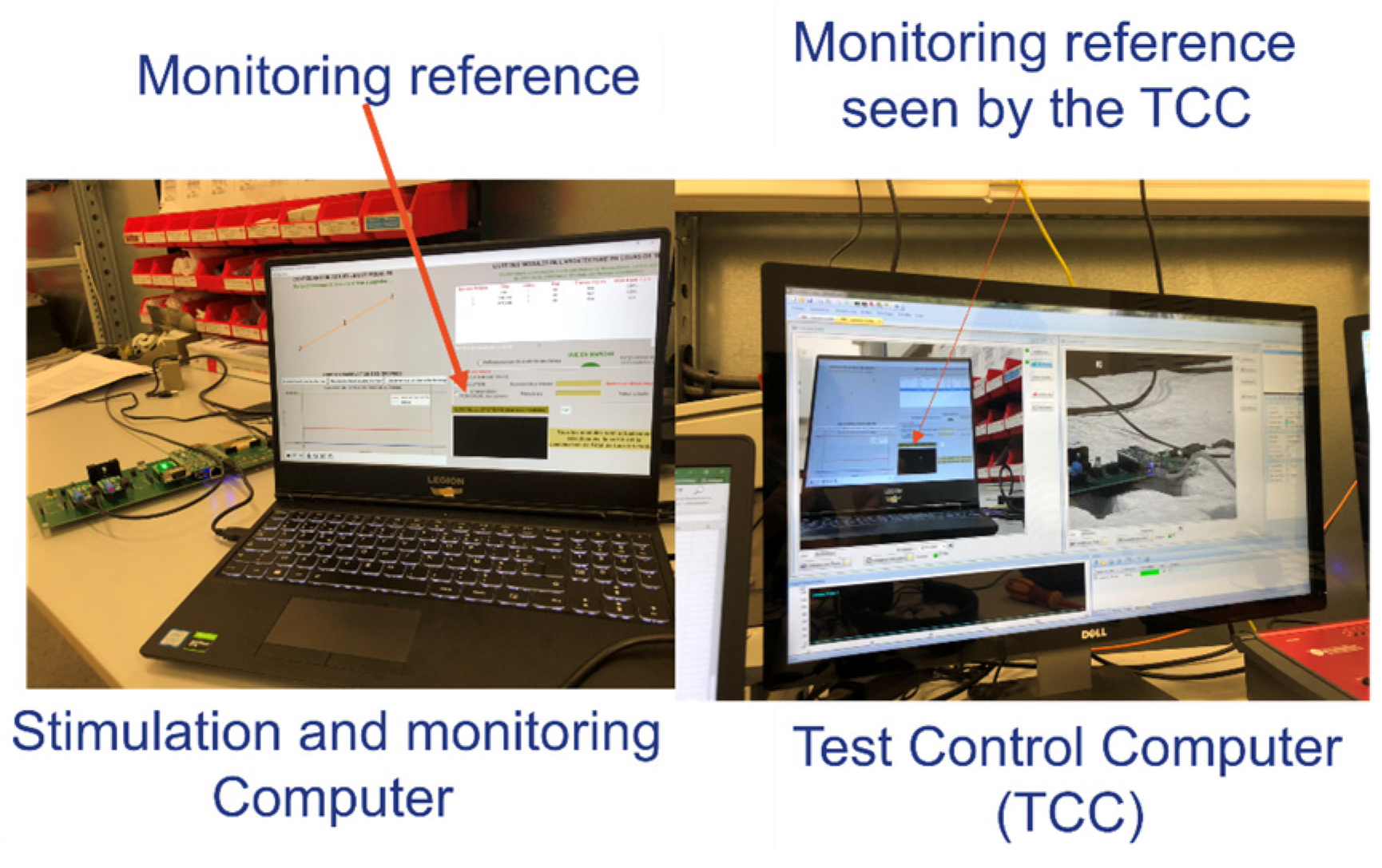
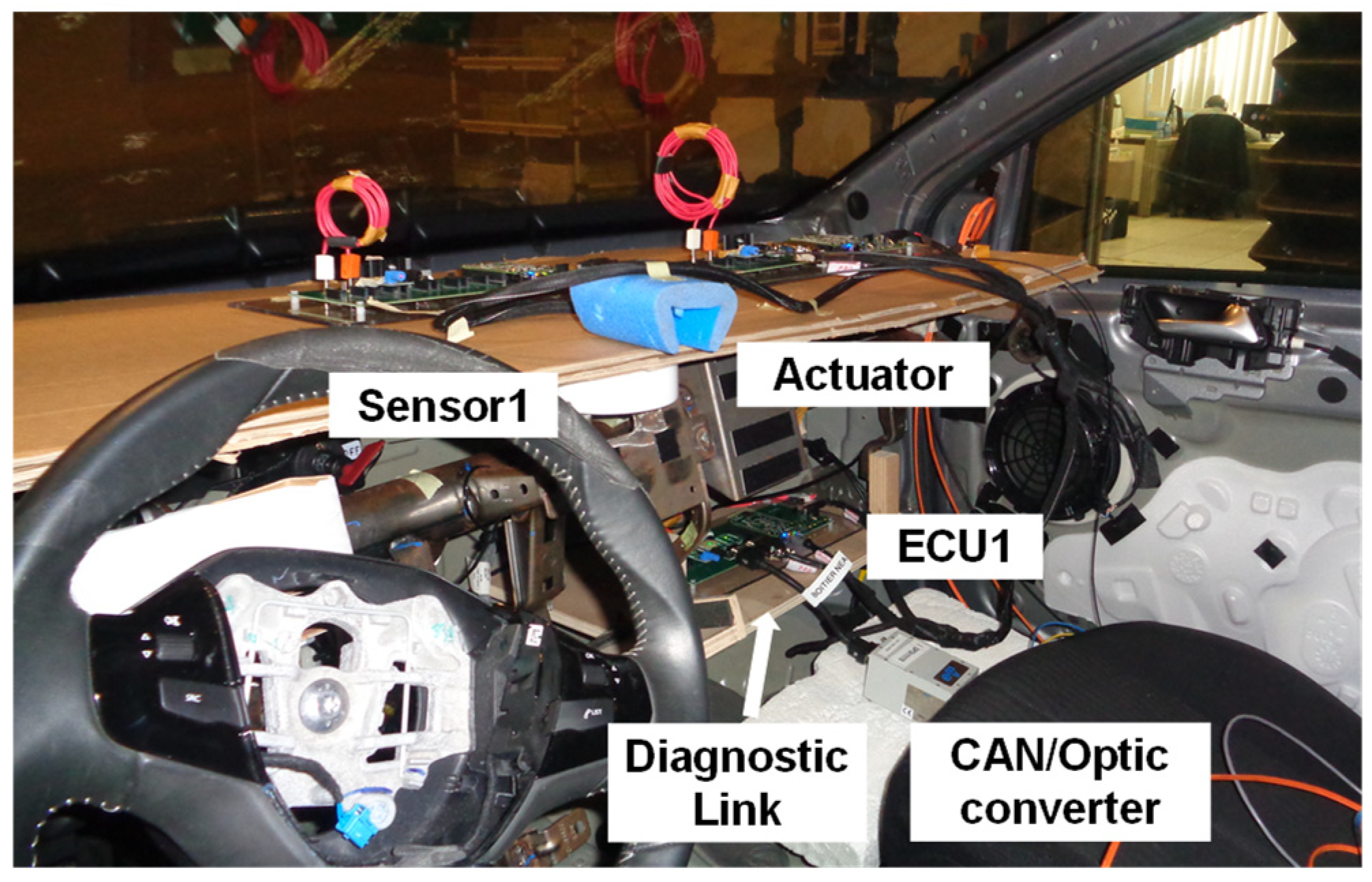
4.4. Stimulation and Monitoring of the EE Architecture
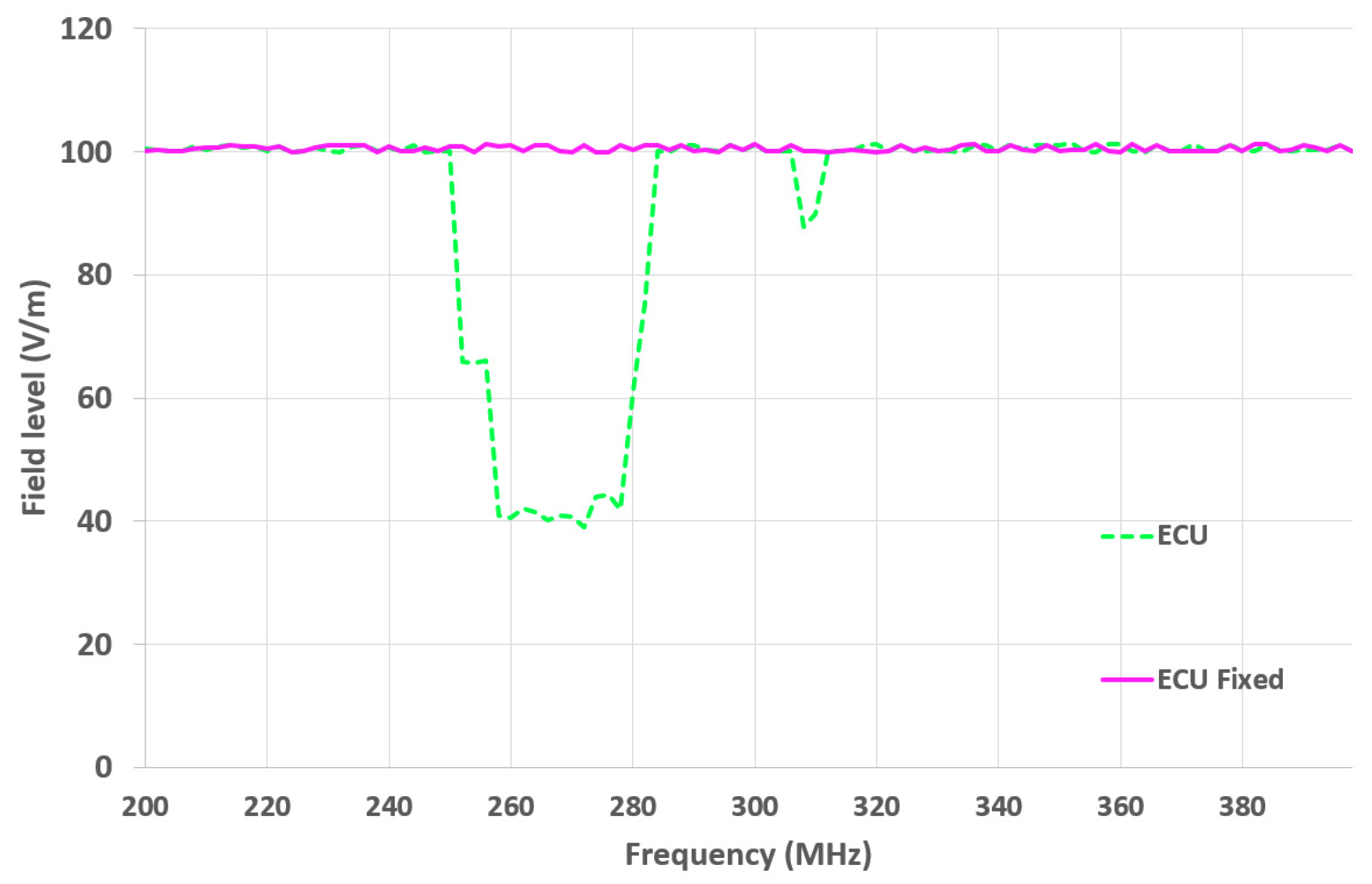
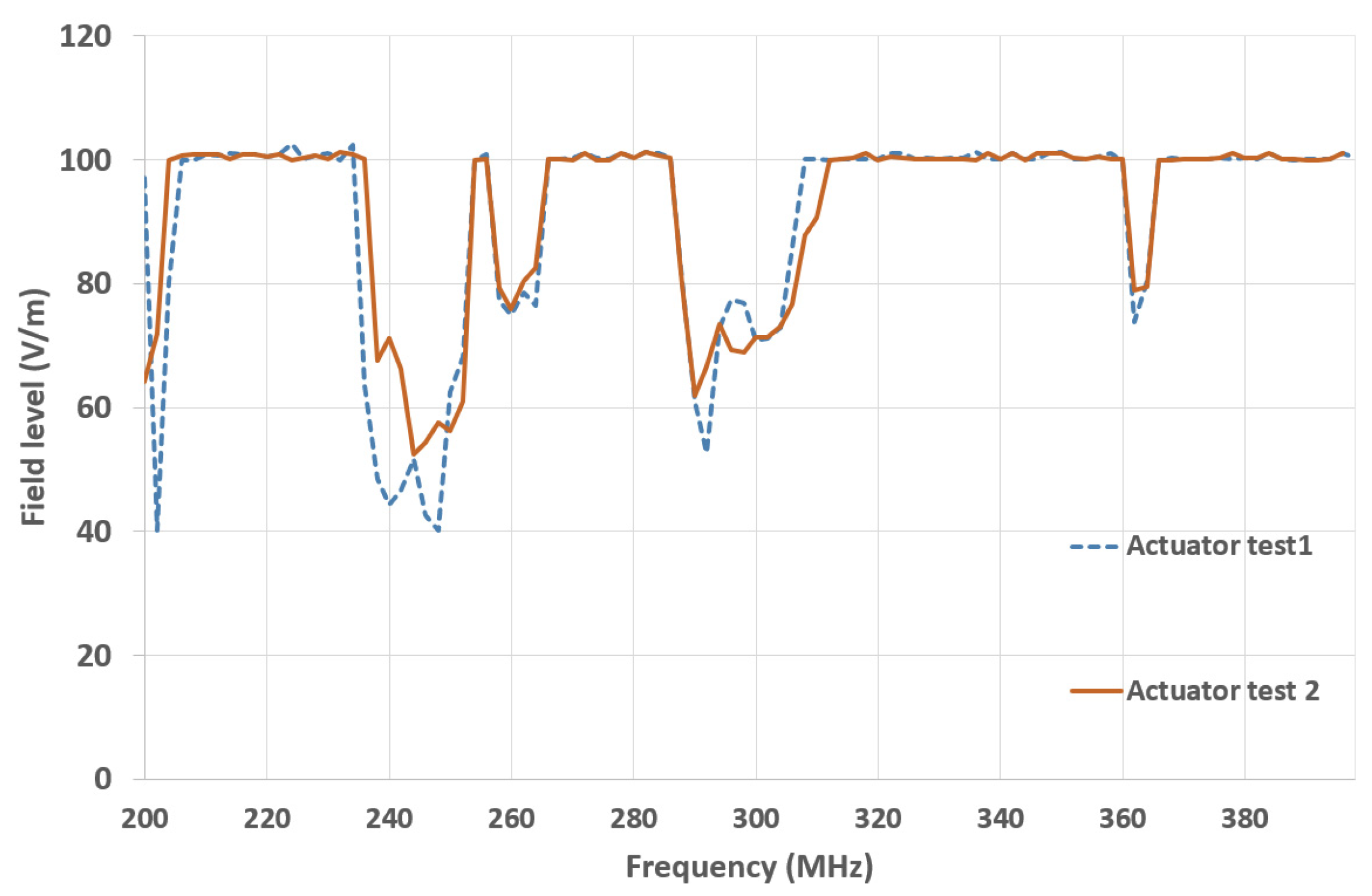
5. Analysis of Immunity Test Results
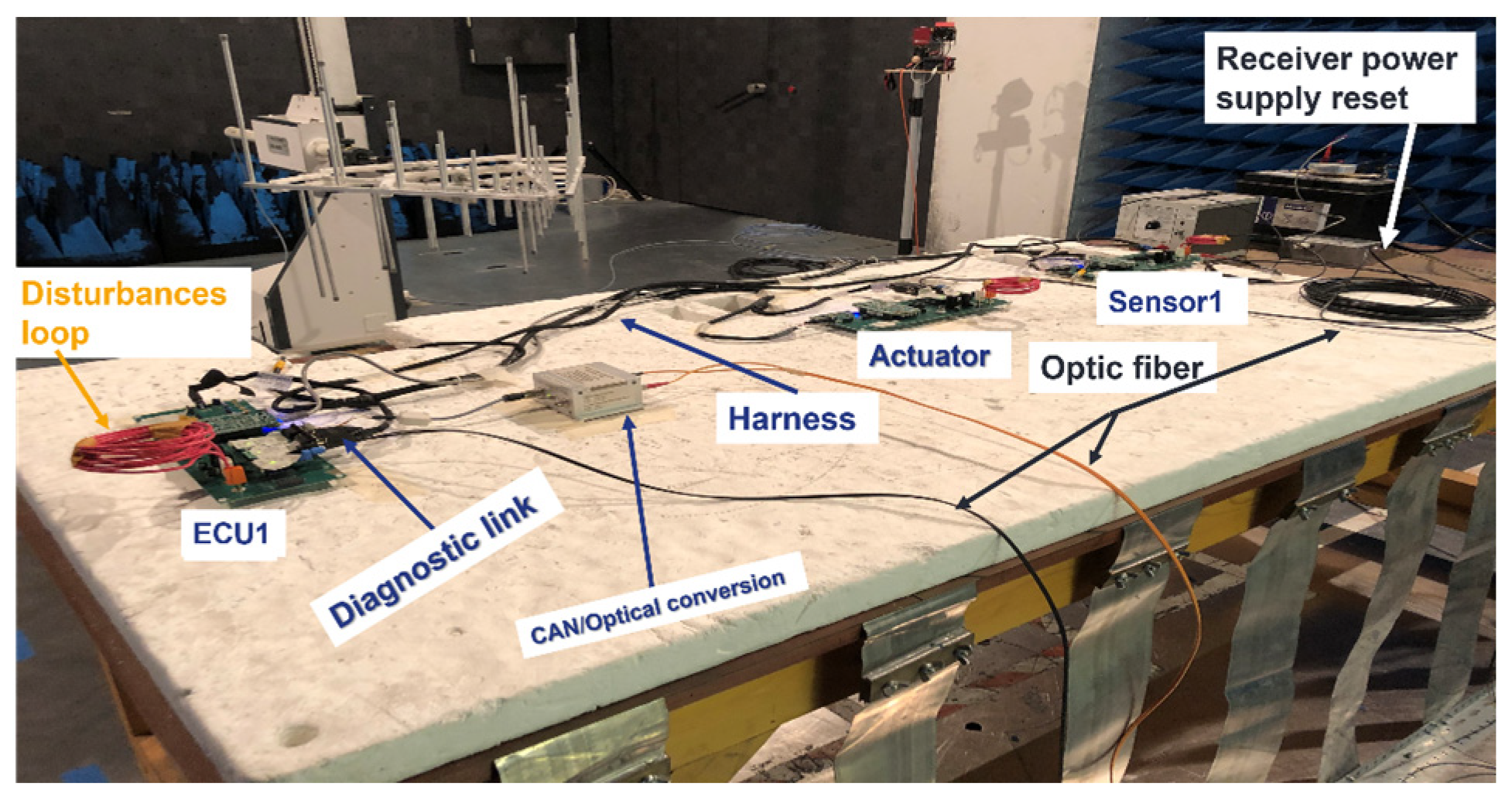
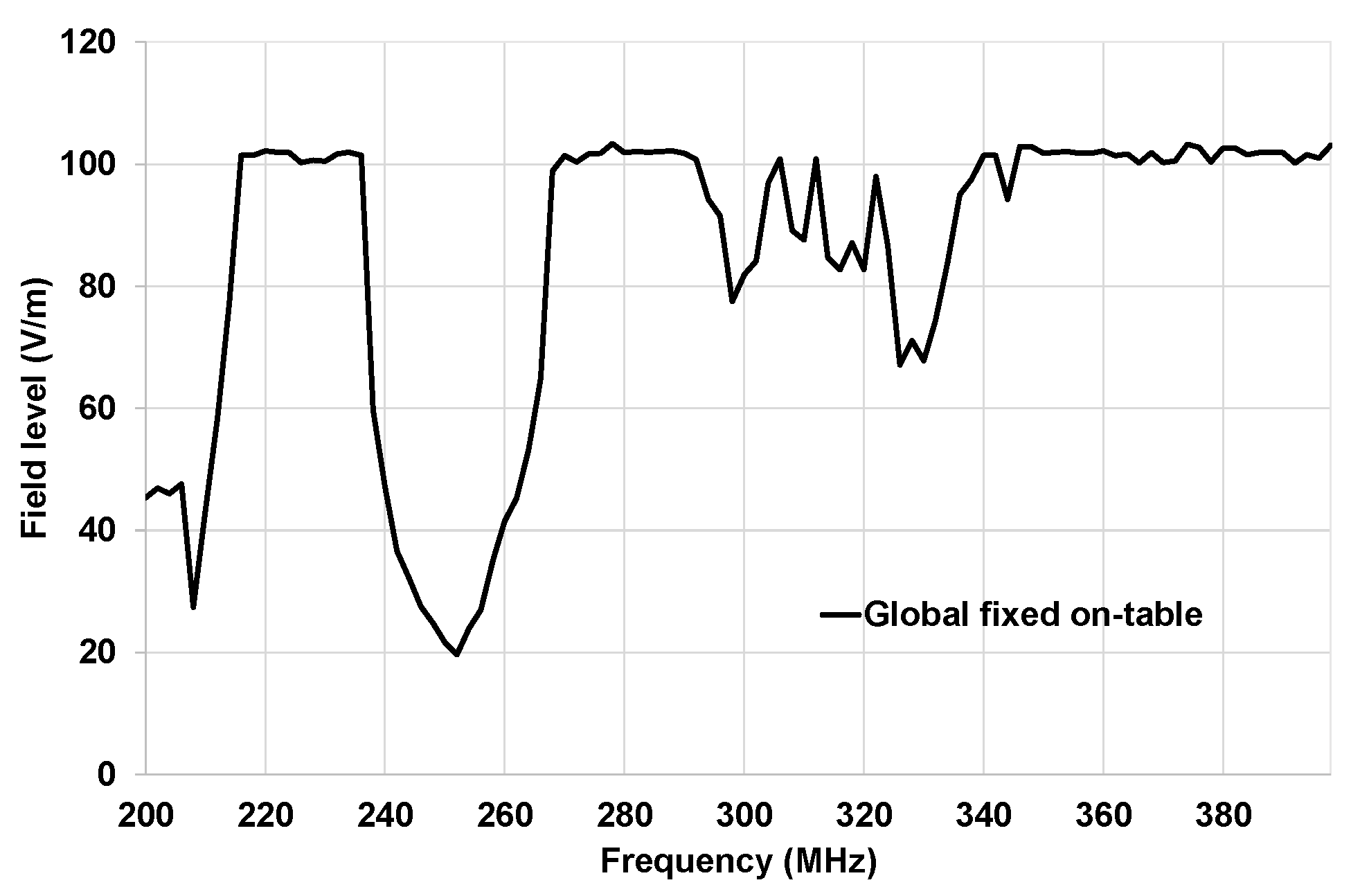
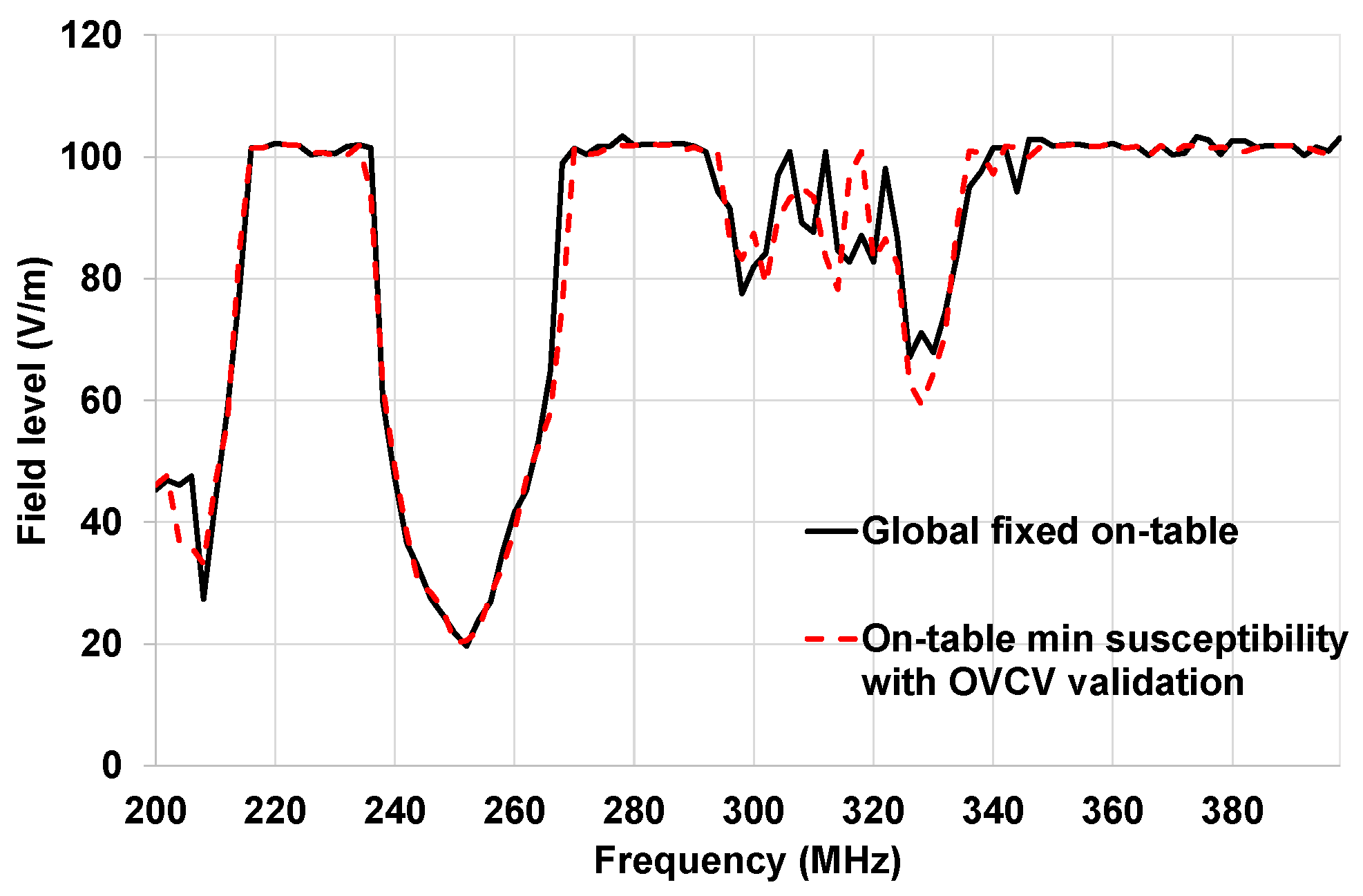
5.1. On-Table Tests (Bench Tests)
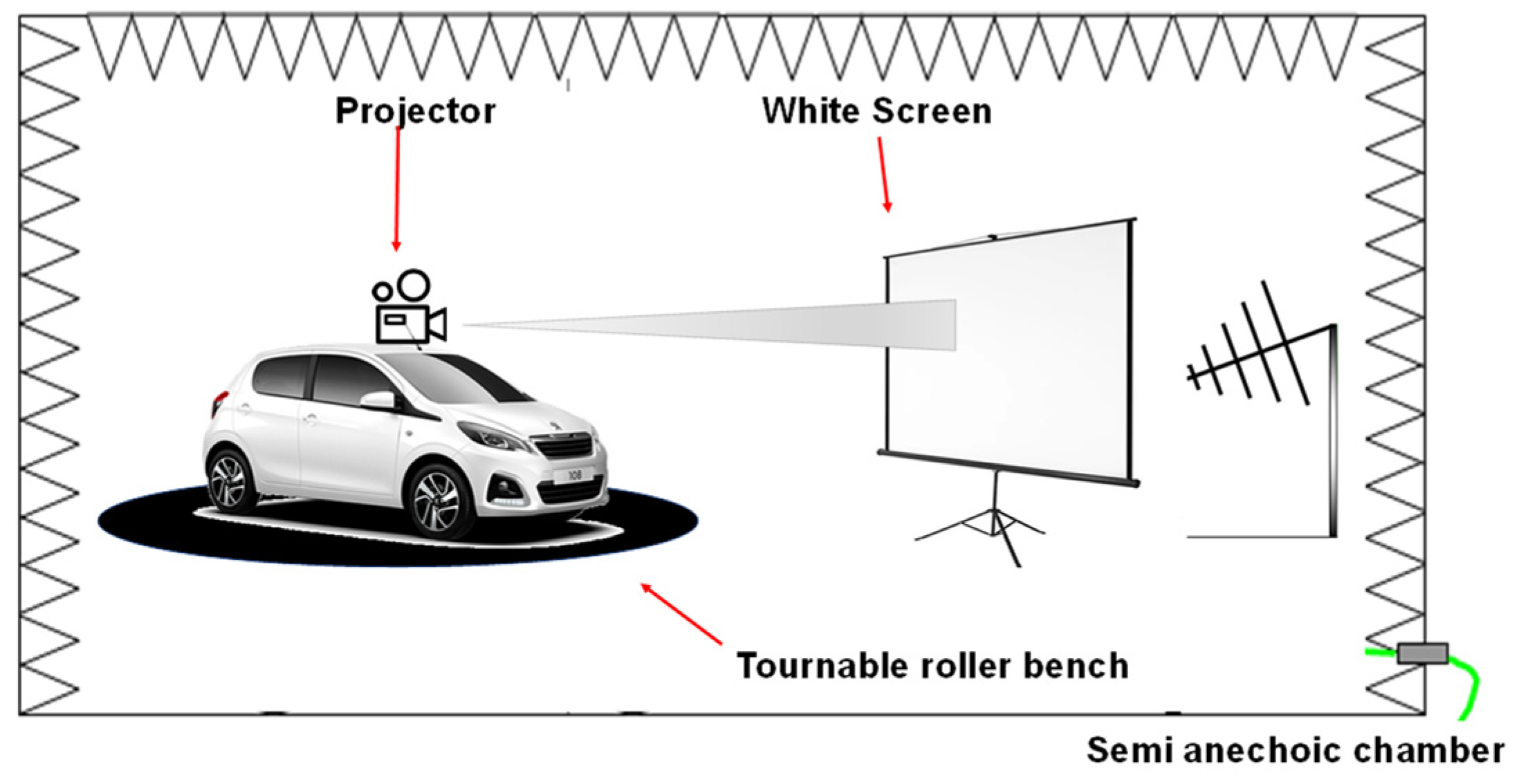
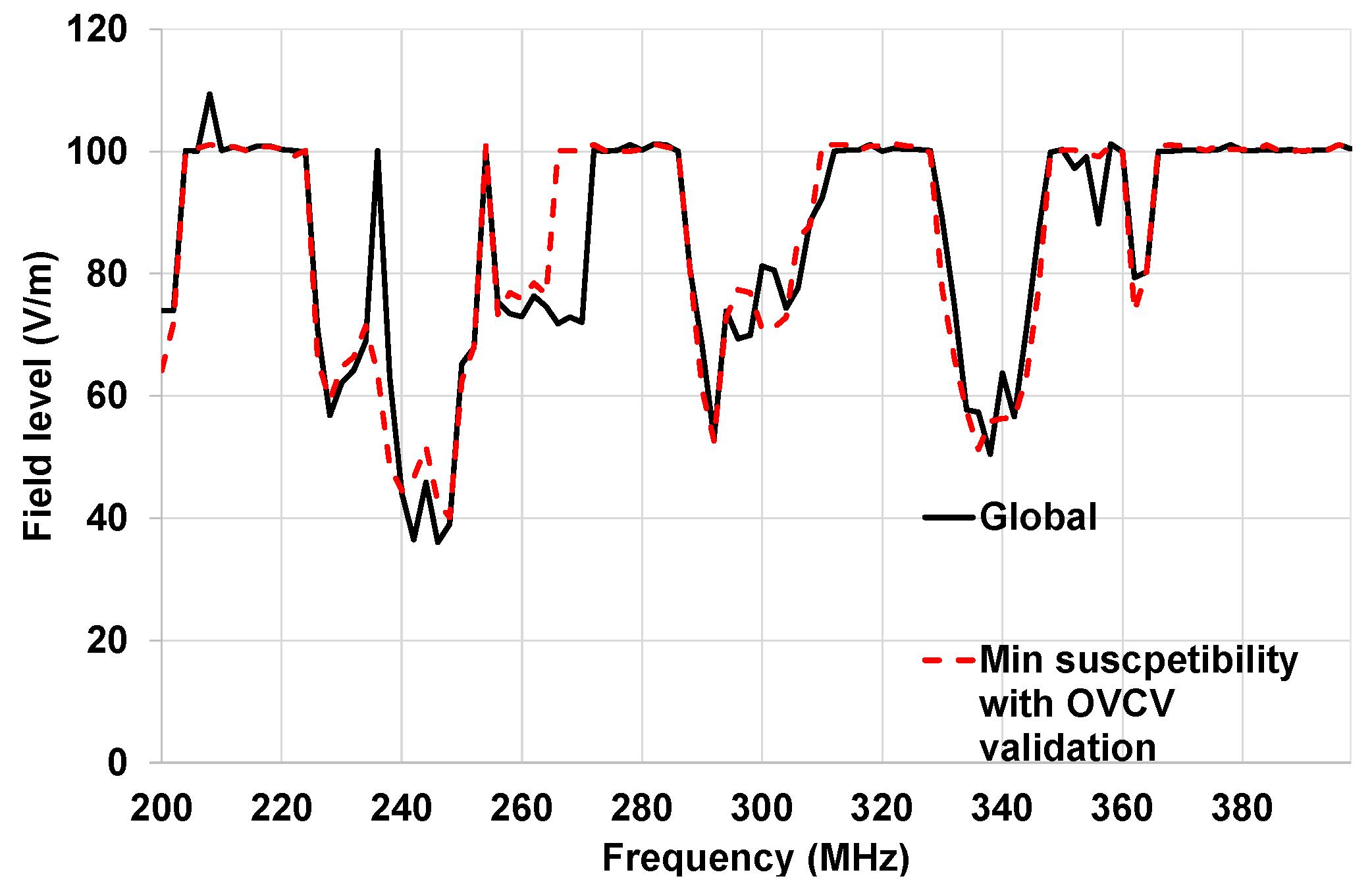
5.2. On-Vehicle Test Results
- Step 1: all central ECUs of the vehicle;
- Step 2: all sensors;
- Step 3: all actuators.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
Appendix C
References
- Liang, Z.; Wang, Z.; Zhao, J.; Wong, P.K.; Yang, Z.; Ding, Z. Fixed-Time Prescribed Performance Path-Following Control for Autonomous Vehicle with Complete Unknown Parameters. IEEE Trans. Ind. Electron. 2023, 70, 8. [Google Scholar] [CrossRef]
- Gao, H.; Qin, Y.; Hu, C.; Liu, Y.; Li, K. An Interacting Multiple Model for Trajectory Prediction of Intelligent Vehicles in Typical Road Traffic Scenario. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 6468–6479. [Google Scholar] [CrossRef] [PubMed]
- Waszecki, P.; Mundhenk, P.; Steinhorst, S.; Lukasiewycz, M.; Karri, R.; Chakraborty, S. Automotive Electrical and Electronic Architecture Security via Distributed In-Vehicle Traffic Monitoring. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2017, 36, 11. [Google Scholar] [CrossRef]
- Buechel, M.; Frtunikj, J.; Becker, K.; Sommer, S.; Buckl, C.; Armbruster, M.; Marek, A.; Zirkler, A.; Klein, C.; Knoll, A. An Automated Electric Vehicle Prototype Showing New Trends in Automotive Architectures. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 1274–1279. [Google Scholar] [CrossRef]
- Lin, S.C.; Zhang, Y.; Hsu, C.H.; Skach, M.; Haque, M.E.; Tang, L.; Mars, J. The Architectural Implications of Autonomous Driving: Constraints and Acceleration. In Proceedings of the Twenty-Third International Conference on Architectural Support for Programming Languages and Operating Systems, Williamsburg, VA, USA, 24–28 March 2018; pp. 751–766. [Google Scholar] [CrossRef]
- Ayachi, R.; Afif, M.; Said, Y.; Ben, A. Abdelali, Traffic Sign Recognition Based On Scaled Convolutional Neural Network For Advanced Driver Assistance System. In Proceedings of the 2020 IEEE 4th International Conference on Image Processing, Applications and Systems (IPAS), Genova, Italy, 9–11 December 2020; pp. 149–154. [Google Scholar] [CrossRef]
- Traub, M.; Maier, A.; Barbehön, K.L. Future Automotive Architecture and the Impact of IT Trends. IEEE Softw. 2017, 34, 3. [Google Scholar] [CrossRef]
- ISO 11451; Road Vehicles—Vehicle Test Methods for Electrical Disturbances from Narrowband Radiated Electromagnetic Energy—Part 2: Off-Vehicle Radiation Sources. International Organization for Standardization: Geneva, Switzerland, 2015.
- United Nations Economic Commission for Europe. ECE R.10 Rev.6/UNR10 Regulation (Uniform Provisions Concerning the Approval of Vehicles with Regard to Electromagnetic Compatibility); United Nations Economic Commission for Europe: Geneva, Switzerland, 2019. [Google Scholar]
- Han, Q.; Lei, J.; Zeng, L.; Tang, Y.; Liu, J.; Chen, L. EMC Test for Connected Vehicles and Communication Terminals. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018. [Google Scholar]
- Matsushima, S.; Matsushima, T.; Hisakado, T.; Wada, O. Trends of EMC standards for automotive network devices and communication quality of ethernet in relation to parameters of pulse disturbances. IEEE Electromagn. Compat. Mag. 2018, 7, 1. [Google Scholar] [CrossRef]
- Chen, W.; Mu, X.; Wang, T.; Zhang, J.; Liu, Y. Analysis on the Change of the Electromagnetic Compatibility Test Method of Automobile and Parts based on the of the Changes in ECE R10. In Proceedings of the 2022 International Conference on Wireless Communications, Electrical Engineering and Automation (WCEEA), Indianapolis, IN, USA, 15–16 October 2022; pp. 141–146. [Google Scholar] [CrossRef]
- ISO 11452-1; Road Vehicles—Component Test Methods for Electrical Disturbances from Narrowband Radiated Electromagnetic Energy. International Organization for Standardization: Geneva, Switzerland, 2015.
- Hofer, A.; Cecil, S. Numerical Simulation of Field Distribution Regarding Automotive Component EMC-testing According to ISO 11452-2. In Proceedings of the 2022 International Symposium on Electromagnetic Compatibility—EMC Europe, Gothenburg, Sweden, 5–8 September 2022; pp. 399–404. [Google Scholar] [CrossRef]
- SAE International. SAE Surface Vehicle Electromagnetic Compatibility (EMC) Standards Manual, 2017th ed.; SAE International: Warrendale, PA, USA, 2017. [Google Scholar]
- Rodriguez, V. Automotive component EMC testing: CISPR 25, ISO 11452-2 and equivalent standards. IEEE Electromagn. Compat. Mag. 2012, 1, 83–90. [Google Scholar] [CrossRef]
- Kuvedu-Libla, J.-R.K. Radiated immunity tests of automotive EMC challenge vehicle active antenna designs. In Proceedings of the 2008 IEEE International Symposium on Electromagnetic Compatibility, Detroit, MI, USA, 18–22 August 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Bergqvist, B.; Carlsson, J.; Toss, H.; Persson, T.; Westlund, A. Automotive EMC Testing: CISPR 25, ISO 11452-2 and Equivalent Standards—EMC Standards and Chamber Testing for Automotive Components. In Compliance Magazine—Electronic Design, Testing and Standards, 29 January 2016. Available online: https://incompliancemag.com/automotive-emc-testing-cispr-25-iso-11452-2-and-equivalent-standards/ (accessed on 7 January 2025).
- Yang, D.; Jiao, X.; Jiang, K.; Cao, Z. Driving Space for Autonomous Vehicles. Automot. Innov. 2019, 2, 4. [Google Scholar] [CrossRef]
- Behere, S.; Törngren, M. A Functional Architecture for Autonomous Driving. In Proceedings of the First International Workshop on Automotive Software Architecture, Montréal, QC, Canada, 4 May 2015; pp. 3–10. [Google Scholar] [CrossRef]
- Lei, J.; Han, Q.; Xu, Y.; Li, F.; Chen, R.; Chen, L. Semi-virtual Test for ICVs in Automotive EMC Laboratary. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 43–48. [Google Scholar] [CrossRef]
- Chen, W.; Wang, W.; Wang, K.; Li, Z.; Li, H.; Liu, S. Lane departure warning systems and lane line detection methods based on image processing and semantic segmentation: A review. J. Traffic Transp. Eng. Engl. Ed. 2020, 7, 6. [Google Scholar] [CrossRef]
- Toss, H.; Bergqvist, B.; Persson, T.; Westlund, A.; Carlsson, J. EMC Validation of Multiple Sensor Systems—eVAMS; Public Report, Project within FFI—Electronics, Software and Communication; FFI: Kjeller, Norway, 2017. [Google Scholar]
- Toss, H.; Bergqvist, B.; Persson, T.; Westlund, A.; Carlsson, J. How to perform EMC Testing of Autonomous Vehicles. Electron. Environ. 2017, 3, 32–34. [Google Scholar]
- Bedjiah, N.F.; Klingler, M.; Kadi, M.; Rossi, R. Methodology to Validate the Radiate Immunity of Very Complex Systems by a Succession of Simple Component Radiated Immunity Tests at System Leve. In Proceedings of the 2022 IEEE International Symposium on Electromagnetic Compatibility, Signal and Power Integrity, Spokane, WA, USA, 1–5 August 2022. [Google Scholar] [CrossRef]
- B21 7110; Environment Specifications for Electrical and Electronic Equipments Electrical Characteristics—Normative Technical Specification. PSA: Vélizy-Villacoublay, France, 2019.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ECU1 | ECU2 | ECU3 | ECU4 | ECU5 | ECU6 | |
|---|---|---|---|---|---|---|
| System 1 | x | x | x | |||
| System 2 | x | x | ||||
| System 3 | x | x | ||||
| System 4 | x | x | x | |||
| System 5 | x | x | ||||
| System 6 | x | x | x | x | x | x |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bedjiah, N.F.; Kadi, M.; Klingler, M.; Rossi, R. Methodology to Validate the Radiated Immunity of Sophisticated Automotive Autonomous Systems. Sensors 2025, 25, 1244. https://doi.org/10.3390/s25041244
Bedjiah NF, Kadi M, Klingler M, Rossi R. Methodology to Validate the Radiated Immunity of Sophisticated Automotive Autonomous Systems. Sensors. 2025; 25(4):1244. https://doi.org/10.3390/s25041244
Chicago/Turabian StyleBedjiah, Nadir Fouad, Moncef Kadi, Marco Klingler, and Romain Rossi. 2025. "Methodology to Validate the Radiated Immunity of Sophisticated Automotive Autonomous Systems" Sensors 25, no. 4: 1244. https://doi.org/10.3390/s25041244
APA StyleBedjiah, N. F., Kadi, M., Klingler, M., & Rossi, R. (2025). Methodology to Validate the Radiated Immunity of Sophisticated Automotive Autonomous Systems. Sensors, 25(4), 1244. https://doi.org/10.3390/s25041244