Abstract
By leveraging the high correlation between multi-ping echo data, low-rank and sparse decomposition methods are applied for reverberation suppression. Previous methods typically perform decomposition on the vectorized multi-ping echograph, which is obtained by stacking beamforming outputs from all directions in the same column. However, when the multi-ping correlation of beamforming outputs from different directions varies significantly due to the time-varying nature of the underwater acoustic channel, it becomes challenging to precisely capture the variations of the reverberation background. As a result, the performance of reverberation suppression is degraded. To alleviate this issue, we attempt to decompose the matrix formed by multi-ping beamforming outputs in different directions individually. The accelerated alternating projections method is used to estimate the steady reverberation for moving target detection. By exploiting the differences in spatio-temporal dimensions between moving targets and reverberation fluctuations, a weighted spatio-temporal density method with adaptive thresholding is used to further extract the target echoes. Field data were utilized to validate the effectiveness of the proposed method, and the experimental results demonstrated its superior robustness in an unstable reverberation-limited environment, maintaining an accurate estimation of steady reverberation.
1. Introduction
Active sonar plays a crucial role in protecting vital maritime facilities from underwater threats, such as divers and unmanned underwater vehicles [1,2]. One of the primary factors affecting the detection performance of active sonar is reverberation; it is the sum of scattered waves generated by numerous irregular scatters in the ocean at a certain time [3]. Reverberation in shallow water exhibits similar characteristics to target echoes in both frequency and time domains, making it challenging to distinguish targets and resulting in a high false alarm probability for active sonar systems [4]. Therefore, this paper focuses on improving the detection performance of active sonar in a reverberant environment.
Some research models reverberations from the perspective of their statistical characteristics. When the effective number of scatters within the resolution cell of a sonar is large enough, the reverberation statistics are expected to exhibit a Rayleigh probability distribution function (PDF) [5]. However, the matched-filter envelope in shallow water has shown a non-Rayleigh nature [6]. To fit the observed amplitude distributions, various statistics models have been proposed, such as log-normal [7], Weibull [8], and generalized Pareto [9] distributions. More accurate mixture models, including K–K distribution [10] and Poisson–Rayleigh distribution [11], are investigated. Nevertheless, due to the difficulty in parameter estimation and limited generality, a certain statistical model based on specific physical assumptions cannot be applied to all scenarios [12]. By utilizing the Doppler shift characteristics of moving targets, reverberation can be reduced in the Doppler domain [13,14]. However, such Doppler-based methods may be invalid for targets with lower speeds or in cases of high-level background fluctuations [15]. Based on the focusing characteristics of linear frequency-modulated (LFM) signals in the fractional Fourier domain, several approaches have been applied to detect moving targets in reverberant environments [16,17]. However, the effectiveness of these methods might be degraded in scenarios with a low signal-to-reverberation ratio (SRR) [15].
In the context of underwater surveillance of maritime areas, active sonar is typically deployed in a fixed position, resulting in highly correlated echo signals over consecutive pulse cycles [4]. These returns are generally displayed as echographs, showing echo intensity across various ranges and bearings [14]. By stacking multiple vectorized echographs into an observation matrix (as shown in Figure 1a), methods based on low-rank and sparsity matrix decomposition can decompose it into dynamic and steady component [18]. The dynamic component, consisting of echoes from moving targets and oceanic fluctuations (e.g., surface waves) [15], is treated as a sparse matrix, while the steady component that arises from the stationary state of the ocean, like the seabed [19], is treated as a low-rank matrix. Rooted in this idea, fruitful methods have been proposed for reverberation suppression, including the accelerated proximal gradient (APG) method [20], the dynamic mode decomposition method [21], and the alternate direction multiplier method (ADMM) [15,22].
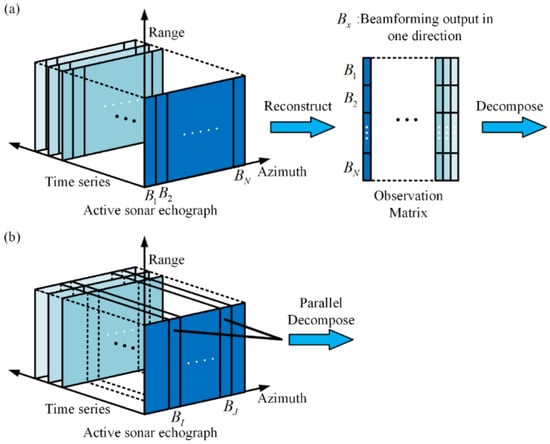
Figure 1.
(a) Flowchart of previous reverberation suppression method. (b) Flowchart of the proposed reverberation suppression method.
The aforementioned methods perform well when the underwater environment is relatively stable, as this ensures that the correlation of multi-ping beamforming outputs across different directions remains highly consistent. However, due to the time-varying characteristics of the underwater acoustic channel, these correlations can vary greatly. The fluctuation in sound propagation in different directions makes it challenging to accurately estimate the low-rank background, leading to the obscuration of weak target signal; thus, the above-mentioned method may lead to reverberation suppression performance degradation.
To address this issue, we propose a more robust method for detecting small moving targets in a reverberation-limited environment. Specifically, we try to perform low-rank and sparsity decomposition on the matrix formed by multi-ping beamforming outputs in particular directions separately (as shown in Figure 1b). By utilizing parallel computing, it is possible to process beamforming outputs from multiple directions simultaneously, thereby avoiding any substantial increase in computational time.
In this paper, we achieve reverberation suppression in two steps. The first step is to suppress the steady component of reverberation. For the actual water environment, estimating the steady component in nonlinear space may be more appropriate, as some research has indicated. Xiang et al. [23] employed a robust autoencoder method to project the echo data into a low-dimensional space, achieving a nonlinear estimation of the steady component of reverberation. Zhu et al. [24] utilized the algorithm of the Grassmann manifold to obtain a low-rank matrix, thereby reducing computational time while maintaining the performance of reverberation suppression. We try to estimate the steady reverberation in the Riemann manifold using the accelerated alternating projections method [25], and the dynamic component is obtained via a hard thresholding operator. It is worth emphasizing that we process the multi-ping beamforming output in each direction in parallel and aggregate the results to obtain the complete dynamic components. After eliminating the steady component of reverberation, the target echo signals can be detected in the dynamic component by setting a hard threshold in most cases. However, the fluctuation characteristic of the underwater acoustic environment causes the reverberation fluctuations and target echoes to exhibit comparable magnitudes in the dynamic component of some pings [15]. Thus, the second step is to further extract target echoes from dynamic components. Noting that the target signal and reverberation fluctuations show differences in weighted spatio-temporal density (WSTD) [26] features, a WSTD threshold can be set to distinguish the reverberation fluctuations and the target echoes. However, the determination of the WSTD threshold poses challenges. In this paper, we select the threshold based on the WSTD distribution characteristics of reverberation fluctuations in each ping, enabling a more effective extraction of the target echoes.
The remainder of this paper is organized as follows. In Section 2, we analyze the correlation of beamforming outputs in different directions using correlation coefficients. Section 3 introduces a method for steady reverberation suppression based on accelerated alternating projections, followed by the suppression of reverberation fluctuations using the WSTD method. We also introduce two evaluation metrics for reverberation reduction performance: bias of the Integral SideLobe Ratio and the sparse coefficient. In Section 4, we analyze the performance of the proposed method using field data and compare it with other methods. Section 5 summarizes the conclusions of this study.
2. Correlation Analysis of Multi-Ping Beamforming Output
In the case where the active sonar is positioned in a fixed location, it periodically emits pulse signals and receives the echoes. One ping of these echoes can be represented using a bearing-range spatial spectrum matrix , where and are the dimensions in the range and bearing, respectively. We then define as the beamforming and match-filtered output of a direction within . We then reorganize the matrix as a column vector , which is
pings of form an observation matrix as follows:
Previous methods typically perform matrix low-rank and sparse decomposition on such observation matrices to achieve steady reverberation suppression. When the moving targets enter the monitoring area of the active sonar, can be treated as a sum of a low-rank matrix and sparse matrix as follows:
To quantitatively describe the column correlations of and , the correlation coefficient is employed as the evaluation criterion. This coefficient measures the strength of the relationship between two vectors and is defined as follows:
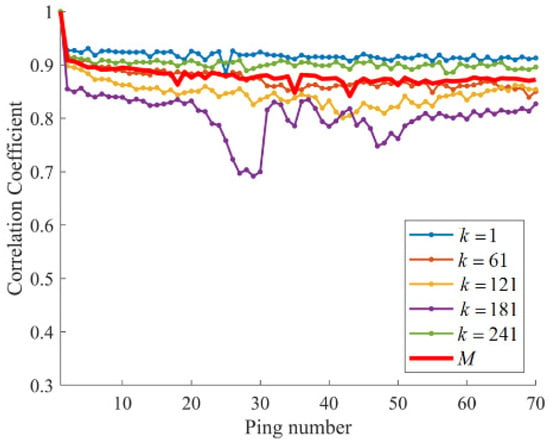
Figure 2.
The correlation coefficient analysis of the received data.
3. Methodology of Reverberation Suppression
3.1. Problem Formulation
Suppose we have multi-ping data ; the matrix formed by multi-ping beamforming output in a particular direction is a slice of along time dimensions . According to the analysis in Section 2, can be modeled as the sum of the steady component and dynamic component as follows:
3.2. Reducing Steady Reverberation Using AccAltProj
Reverberation suppression aims to enhance the detection of target echo signals in a reverberation-limited environment. Given that the target echoes are present within the dynamic component, it is essential to extract the sparse matrix .
In this paper, we try to achieve the decomposition of Equation (3) by a non-convex algorithm. The objective function of Equation (3) can be formulated as
Let denote the current estimations. At the -th iteration, the left and right singular vectors define an -dimensional subspace [25,27].
Then, this intermediate matrix can be projected onto the rank- matrix manifold by truncated SVD, which is
Utilizing QR decomposition offers a more efficient and accurate approach to estimate [25]. Let and be the QR decompositions of and , respectively. Then, the projections of onto the tangent space of could be calculated as follows [25]:
Based on the aforementioned methods for estimating and , we then introduce the reverberation suppression method proposed in this paper. Given the original data , the -th slice of along the third dimension is . The decomposition of is described in Algorithm 1.
| Algorithm 1: Steady reverberation reduction based on AccAltProj |
| Input: Echographs Tensor |
| Initilize: |
| Parameter: : target rank; : target precision level; : thresholding parameter; : target converge rate; |
| 1: parfor do //parallel computing |
| 2: Initialize and using initialization proposed in [25]. |
| 3: |
| 4: while do |
| 5: Estimate the steady component of reverberation using Equation (7) |
| 6: Updata the hard thresholding value using Equation (12) |
| 7: Estimate the dynamic component using Equation (10) |
| 8: |
| 9: end while |
| 10: |
| 11: end parfor |
| Output: |
3.3. Reducing Reverberation Fluctuations Using WSTD Method with Adaptive Thresholding
The steady reverberation interference has been eliminated by Algorithm 1, and the dynamic component is obtained. However, it contains not only moving target echoes but also reverberation fluctuations. These randomly occurring interference signals are spatially discrete and of short duration. In contrast, moving target echoes tend to be spatially concentrated and exhibit strong temporal continuity. Furthermore, the signal intensity of moving targets is typically stronger than that of reverberation fluctuations. Building upon these characteristics, the WSTD method [26] is proposed to further suppress the reverberation fluctuations. The WSTD of moving targets is different from that of clutter. By setting an appropriate WSTD threshold, the interference caused by reverberation fluctuations can be filtered out.
For the -th ping input data , the dynamic component is estimated as . By applying a hard threshold to the entries in , the locations of potential moving targets were estimated as follows:
The non-zero entries in matrix signify the location of potential moving targets in -th ping; otherwise, there are no moving targets. To better detect the target echoes from , the threshold is determined under a false alarm probability () of 0.5 × 10−3. Then, we calculate the WSTD feature of . For each non-zero entry in , the spatio-temporal window is centered around it with size , where is the window length in range dimension, is the window length in bearing direction dimension, and is the length in time dimension. The spatio-temporal density is the number of elements within its the spatio-temporal window, denoted by . The weights are obtained by normalizing the signal intensity values in into a range between 0 and 1 as follows:
Then, the weighted spatio-temporal density feature map of can be obtained as follows:
The target echo component, with the majority of reverberation fluctuations suppressed, can be obtained as follows:
3.4. Evaluation Metric
To quantitatively analyze the reverberation suppression performance of the proposed method, two evaluation metrics are introduced: bias of the Integral SideLobe Ratio and the sparse coefficient.
3.4.1. Bias of the Integral SideLobe Ratio
The Integral SideLobe Ratio (ISLR) represents the ratio of energy between the main lobe and the side lobes. A higher ISLR value indicates superior detection performance [28]. The ISLR is defined as follows:
serves as an index to evaluate the reverberation suppression performance. A greater value of signifies that a larger portion of the reverberation has been suppressed.
3.4.2. Sparse Coefficient
In the context of reverberation suppression, the dynamic component is the portion of interest as it contains the target echo signal. Therefore, the mathematical properties of the dynamic component largely determine the degree of suppression to reverberation, which could be evaluated with the sparse coefficient () [15]. The dynamic component is expected to have high sparsity. A greater implies a larger number of zero entries or entries with minor values in . In this paper, we evaluate the of matrix , which is defined as follows:
4. Experiments
4.1. Field Data Collection and Preprocessing
To validate the effectiveness of the proposed method for reverberation reduction, a field experiment was conducted in a certain maritime area in Sanya, Hainan Province, China. The water depth is approximately 8.7 m, and the sound speed is about 1531 m/s. A high-frequency active sonar is deployed in a fixed position, periodically emitting pulse signals into the water and receiving echoes, with the signal waveform being LFM. The sonar detection range is 500 m, with a field of view of 360°. The underwater small target moves at a depth of approximately 5 m. A GPS device was placed directly above the underwater small target to record its trajectory. Figure 3 depicts the experimental schematic. A total of 70 pings of bearing-range spatial spectrum data were extracted to validate the performance of the proposed method. The experiment was carried out in shallow water where reverberation dominated over ambient noise; hence, the impact of ambient noise was not taken into consideration.
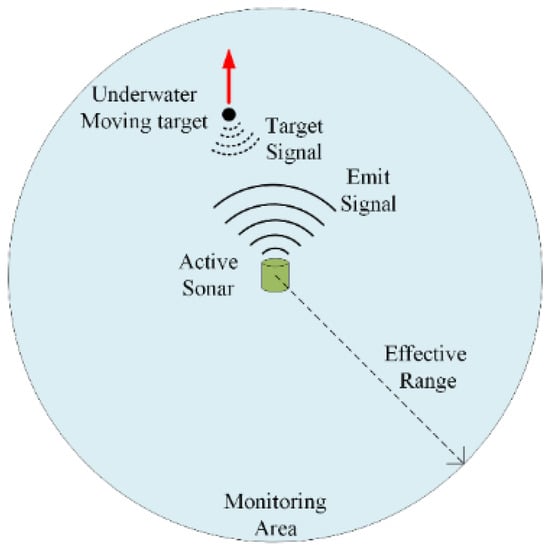
Figure 3.
Schematic of the experiment. The red arrow indicates the approximate direction of movement of the target.
4.2. Experimental Results and Discussion
In this section, the performance of the proposed method for reverberation suppression is analyzed using field data. Section 4.2.1 illustrates the method’s effectiveness in suppressing the steady component of reverberation and compares it with the other method. Section 4.2.2 demonstrates the performance improvements achieved after suppressing reverberation fluctuations.
4.2.1. Steady Reverberation Suppression
To validate the effectiveness of the proposed method, we compare it with the low-rank matrix approximation (LRMA) [29] method, which performs decomposition on the observation matrix shown in Figure 1a, and the final results are obtained by inverse operation. In this experiment, the target rank is set to 2 and the target precision level is set to 10−6. The moving target signal typically occupies only a small portion of the original echograph, meaning the estimated steady reverberation should have a high correlation with the original data. To quantitatively assess the accuracy of the estimated steady reverberation background, the correlation coefficient between the steady reverberation and the original data is calculated. These coefficients, determined using Equation (2), are shown in Figure 4. As illustrated in Figure 4, in pings where the reverberation background fluctuates significantly, such as pings 18, 35, and 43, the proposed method’s estimated steady reverberation maintains a high correlation with the original data. In contrast, the correlation of the reverberation background estimated by the LRMA method decreases in these pings. To further illustrate the impact of accurate reverberation background estimation on the extraction of moving target signals, pings 35 and 43 were subsequently analyzed.
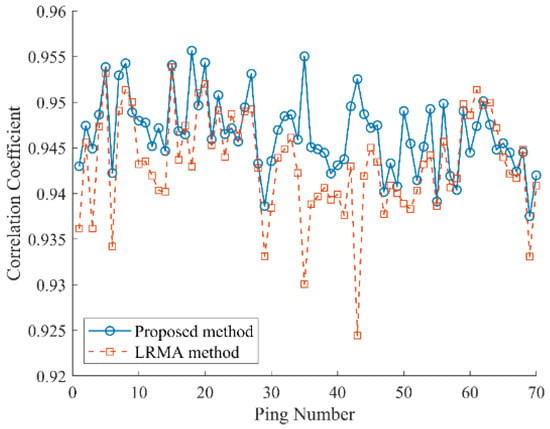
Figure 4.
Correlation coefficient between the original data and the steady component.
The original data for pings and are presented in Figure 5a,b. In these figures, the underwater small target is marked with a red rectangular box, while the ships are indicated by white rectangular boxes. The target echo intensities in both pings are notably weak and are obscured by strong surrounding reverberation, making the targets nearly invisible. The dynamic components extracted using the LRMA method are shown in Figure 5c,d, where the target intensities are 4.11 dB and 5.86 dB, respectively. Although most of the steady reverberation has been eliminated, reverberation fluctuations still dominate, making the targets indistinguishable. In contrast, the dynamic components estimated by the proposed method, displayed in Figure 5e,f, have target intensities of 11.44 dB and 15.8 dB, respectively. Compared to the LRMA method, the proposed method extracts stronger target signals with fewer reverberation fluctuations. This demonstrates that accurate estimation of steady reverberation not only enhances target signal strength within the dynamic components but also reduces reverberation fluctuations, thereby making it easier to identify the targets’ locations.
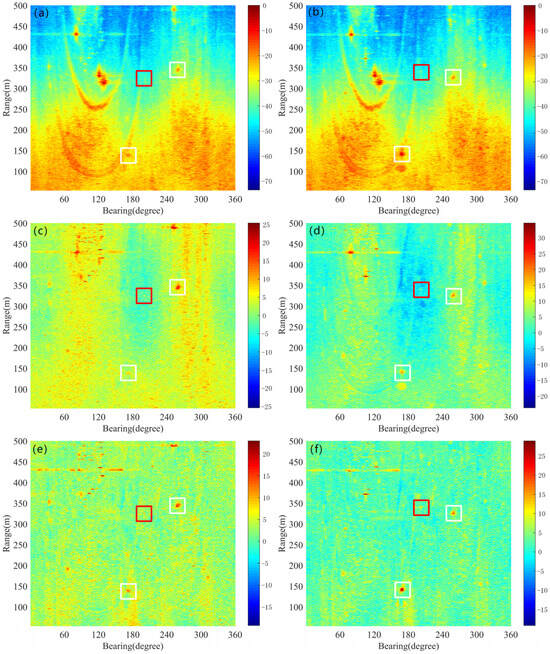
Figure 5.
Reverberation suppression for pings 35 and 43 by the proposed method and the LRMA method; the target is shown in the red rectangle and the ships are shown in white rectangles. (a) Original data of ping 35. (b) Original data of ping 43. (c) Dynamic component of ping 35 by the LRMA method. (d) Dynamic component of ping 43 by the LRMA method. (e) Dynamic component of ping 35 by the proposed method. (f) Dynamic component of ping 43 by the proposed method.
To quantitatively evaluate the performance of the proposed method on the field data, we calculate the of the LRMA method and the proposed method. If the is greater than zero, it signifies effective reverberation suppression; conversely, if it is less than zero, the suppression effect is inadequate. As presented in Figure 6a, the values of the proposed method are mostly higher than those of the LRMA method. For ping 35, ping 43, and ping 44, the values of the LRMA method are less than zero, and they are −1.44, −2.43, and −0.22, respectively, while the values for the proposed method are 1.81, 4.06, and 1.33. In these pings, the correlation coefficient with the reference vector rapidly decreases due to significant variations in the reverberation background. However, the LRMA method struggles to capture these changes, resulting in a lower . In contrast, the proposed method demonstrates robust performance under these conditions. The average of the proposed method is 6.92, compared to 6.05 for the LRMA method, demonstrating the superiority of the proposed method. Let in Equation (13) be set to 2; the values across 70 pings obtained by the proposed method and the LRMA method are presented in Figure 6b. It can be observed that the values for nearly all pings using the proposed method surpass those achieved by the LRMA method, particularly at pings 18, 35, and 43. The mean for the proposed method is 0.76, while that for the LRMA method is 0.73. Compared to the LRMA method, the values of the proposed method increased by a factor of 1.04. This suggests that the dynamic components obtained by the proposed method exhibit a superior reduction in reverberation fluctuations.
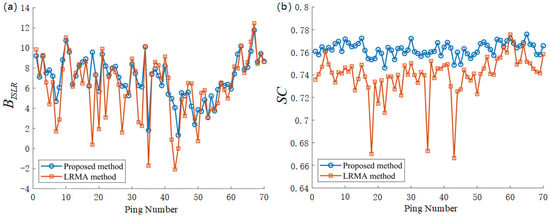
Figure 6.
(a) of all pings of the dynamic component by the LRMA method and the proposed method. (b) of all pings of the dynamic component by the LRMA method and the proposed method.
4.2.2. Reverberation Fluctuation Suppression
To better detect the target echo signal in a specific ping of dynamic component, the detecting threshold is determined under a of 5 × 10−3. For this probability of a false alarm, the and are 10.87 dB and 11.28 for the LRMA method and 9.1 dB and 9.59 for the proposed method, respectively. As illustrated in Figure 7a, the LRMA method fails to detect target echoes, including those from underwater small targets and ships. Similarly, target echoes are invisible in Figure 7b. The detection results of the proposed method for the 35th and 43rd pings are shown in Figure 7c,d. One can observe that the echo of small targets becomes visible (as indicated by the red rectangular boxes), as well as ship targets (as indicated by the white rectangular boxes). However, there is significant interference raised from reverberation fluctuations in these two pings (as indicated by the white ellipse), which affects the identification of target echoes.
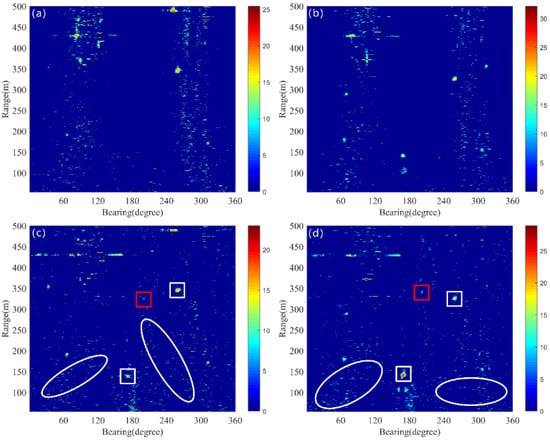
Figure 7.
The red rectangle represents the underwater target, the white rectangle denotes the ship, and the white ellipse signifies the fluctuation of reverberation. (a) Thresholding result of ping 35 by the LRMA method. (b) Thresholding result of ping 43 by the LRMA method. (c) Thresholding result of ping 35 by the proposed method. (d) Thresholding result of ping 43 by the proposed method.
To further reduce the reverberation fluctuations, we calculate the WSTD feature of . The distribution of WSTD for pings 35 and 43 is shown in Figure 5a,b. It can be seen that the WSTD of the reverberation fluctuations is concentrated between 0 and 100, while the WSTD of the target is usually greater than 100. Therefore, it is feasible to determine the threshold based on the distribution characteristics of the WSTD. We take the upper limit of the bins with the highest counts as the threshold, and the target echoes are further extracted through the WSTD method. The WSTD thresholds calculated for pings 35 and 43 are 81 and 95, respectively. As shown in Figure 8c,d, it is evident that the clutter interference caused by reverberation fluctuations has been effectively suppressed without reducing the intensity of the target echoes, allowing clear visibility of the target.
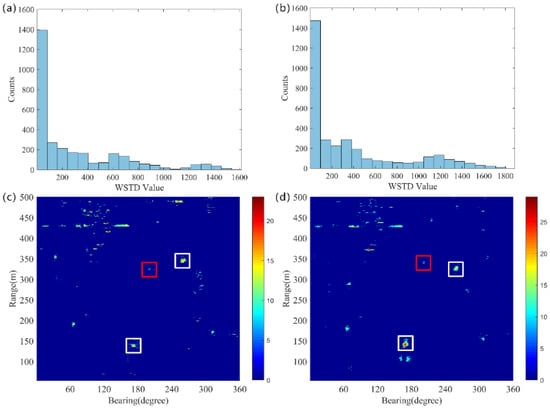
Figure 8.
The red rectangle represents the underwater target, the white rectangle denotes the ship. (a) The histogram of the WSTD distribution for 35 ping. (b) The histogram of the WSTD distribution for 43 ping. (c) The target echoes extracted by the WSTD method for ping 35. (d) The target echoes extracted by the WSTD method for ping 43.
Overlaying the detection results from each ping produces a trajectory map that shows the trajectory of the moving target. The trajectories of underwater small targets are highlighted with red rectangles, while the trajectories of ships are marked with white rectangles. As shown in Figure 9a, the target echo signals are submerged in background interference, making it impossible to identify the target trajectory in the presence of severe reverberation. In Figure 9b, the result of the LRMA method is displayed; although the target trajectory becomes discernible, it shows discontinuities, indicating that the target is undetectable in certain pings. The reverberation is reduced to some extent, but considerable reverberation fluctuations still persist. Figure 9c shows the results obtained by the proposed method, where both steady reverberation and reverberation fluctuations are effectively suppressed, allowing a clear visibility of the target trajectory.
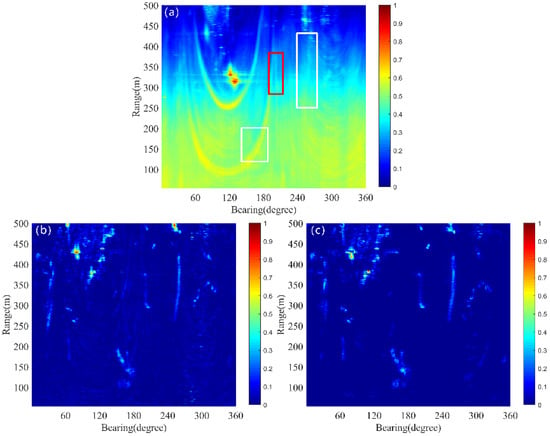
Figure 9.
The reverberation reduction to field data of all pings by the LRMA method and the proposed method; the target trajectory is shown in a red rectangle and the ship trajectories are shown in white rectangles. (a) The original data. (b) The LRMA method. (c) The proposed method.
5. Discussion
In this experiment, the computer used for calculations was equipped with a Core i7-11800 h CPU and 32 GB of RAM. To evaluate the computational performance of the proposed method, multiple experiments were conducted, and the average value was taken as the final result. The LRMA method took 12.24 s to decompose 70 pings of original data. The proposed method took 0.53 s to compute the multi-ping beamforming output for a single direction and 17.85 s for all directions using parallel computation. Although the proposed method requires slightly more processing time, it achieves superior reverberation suppression performance.
The field data were collected in actual ocean environments with considerable interference, and only the precise location of one underwater target was recorded. Another two trajectories from ship targets are also detected, suggesting that the proposed method is applicable for multi-target detection, and the dynamic components extracted by the method are irrelevant to the number of targets.
If there are no targets entering the sonar monitoring area, the dynamic component contains reverberation fluctuations or other non-target interferences, such as marine creatures. These non-target signals may lead to false positives in some pings. Nonetheless, false positives seldom show evolutionary continuity in the spatial-time space. Thus, the existence of a target is jointly determined by its appearance across multiple pings. The WSTD method separates targets and interferences by exploiting their differences across multiple pings, regardless of the number of targets.
Previous methods have achieved reverberation reduction based on the observation matrix shown in Figure 1a. However, this approach fails to accurately capture variations in reverberation backgrounds across different directions, leading to imprecise estimation of the steady component of reverberation. In contrast, the proposed method performs low-rank and sparse matrix decomposition on the multi-ping beamforming output for each direction individually, effectively capturing background variations and accurately extracting target echoes, even under low SRR conditions. When the underwater acoustic environment remains relatively stable, the performance of the proposed method is comparable to that of previous methods. The primary advantage of the proposed method lies in its enhanced robustness in scenarios where reverberation background variations are pronounced. Furthermore, in practical monitoring tasks, it may not be necessary to monitor all directions. Therefore, the proposed method can be used to detect the presence of targets in specific directions.
6. Conclusions
In this paper, we analyzed the correlation of multi-ping beamforming outputs from different directions using the correlation coefficient. We found that these correlations can vary significantly due to the time-varying characteristics of the underwater acoustic channel, leading to a decrease in the reverberation suppression performance of the previous method. To address this issue, we proposed a method based on AccAltPro that decomposes the beamforming outputs from different directions into steady and dynamic components separately using parallel computation. An improved WSTD method with adaptive threshold selection is then employed to further extract target echoes from the dynamic component. Field experiment data collected in Sanya, China, demonstrate the effectiveness of the proposed method. Compared with the LRMA method, the ISLR of the proposed method increases by an average of 0.87 dB, and it is increased by a factor of 1.04.
The proposed method enhances the robustness of low-rank sparse decomposition algorithms in scenarios with significant variations in reverberation background, enabling the detection of target echoes even in low signal-to-reverberation ratios (SRRs). Future research will focus on the generalization performance of the algorithm, testing its reverberation suppression capabilities in different maritime environments.
Author Contributions
Conceptualization, X.X.; methodology, X.X.; software, X.X.; validation, X.X., J.Y. and F.X.; formal analysis, X.X. and J.Y.; data curation, X.X. and J.Y.; writing—original draft preparation, X.X.; writing—review and editing, X.X.; supervision, J.Y. and F.X. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Foundation project of Chinese Academy of Sciences, grant number 8091A120105.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Dataset available on request from the authors.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Kessel, R.T.; Hollett, R.D. Underwater Intruder Detection Sonar for Harbour Protection: State of the Art Review and Implications; Technical Report No. NURC-PR-2006-027; NATO Undersea Research Centre: La Spezia, Italy, 2006. [Google Scholar]
- Patterson, M.R.; Patterson, S.J. Unmanned systems: An emerging threat to waterside security: Bad robots are coming. In Proceedings of the 2010 International WaterSide Security Conference, Carrara, Italy, 3–5 November 2010; pp. 1–7. [Google Scholar]
- Urick, R.J. Principles of Underwater Sound, 3rd ed.; McGraw-Hill Book Company: New York, NY, USA, 2007; pp. 237–287. [Google Scholar]
- Zhu, Y.; Duan, R.; Yang, K. Robust shallow water reverberation reduction methods based on low-rank and sparsity decomposition. J. Acoust. Soc. Am. 2022, 151, 2826–2842. [Google Scholar] [CrossRef] [PubMed]
- Lyons, A.P.; Abraham, D.A. Statistical characterization of high-frequency shallow-water seafloor backscatter. J. Acoust. Soc. Am. 1999, 106, 1307–1315. [Google Scholar] [CrossRef]
- Stanic, S.; Kennedy, E. Fluctuations of high-frequency shallow-water seafloor reverberation. J. Acoust. Soc. Am. 1992, 91, 1967–1973. [Google Scholar] [CrossRef]
- Chotiros, N.P.; Boehme, H.; Goldsberry, T.G.; Pitt, S.P.; Lamb, R.A.; Garcia, A.L.; Altenburg, R.A. Acoustic backscattering at low grazing angles from the ocean bottom. Part II. Statistical characteristics of bottom backscatter at a shallow water site. J. Acoust. Soc. Am. 1985, 77, 975–982. [Google Scholar] [CrossRef]
- Gensane, M. A statistical study of acoustic signals backscattered from the sea bottom. IEEE J. Ocean. Eng. 1989, 14, 84–93. [Google Scholar] [CrossRef]
- La Cour, B.R. Statistical characterization of active sonar reverberation using extreme value theory. IEEE J. Ocean. Eng. 2004, 29, 310–316. [Google Scholar] [CrossRef]
- Chotiros, N.P. Non-Rayleigh distributions in underwater acoustic reverberation in a patchy environment. IEEE J. Ocean. Eng. 2010, 35, 236–241. [Google Scholar] [CrossRef]
- Fialkowski, J.M.; Gauss, R.C.; Drumheller, D.M. Measurements and modeling of low-frequency near-surface scattering statistics. IEEE J. Ocean. Eng. 2004, 29, 197–214. [Google Scholar] [CrossRef]
- Zhao, S.; Han, Y.; Wei, Z.; Liu, Q.; Song, J.; Huang, H. Fast online high-order time lacunarity for characterizing active sonar echographs of harbor environment. J. Acoust. Soc. Am. 2020, 148, EL401–EL407. [Google Scholar] [CrossRef]
- Yang, T.C. Acoustic Dopplergram for Intruder Defense. In Proceedings of the IEEE OCEANS, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–5. [Google Scholar]
- Yang, T.C.; Schindall, J.; Huang, C.; Liu, J. Clutter reduction using doppler sonar in a harbor environment. J. Acoust. Soc Am. 2012, 132, 3053–3067. [Google Scholar] [CrossRef]
- Zhu, Y.; Duan, R.; Yang, K.; Xue, R.; Wang, N. Reverberation reduction based on multi-ping association in a moving target scenario. J. Acoust. Soc. Am. 2020, 148, 2195–2208. [Google Scholar] [CrossRef] [PubMed]
- Yu, G.; Piao, S.; Han, X. Fractional Fourier transform-based detection and delay time estimation of moving target in strong reverberation environment. IET Radar Sonar Navig. 2017, 11, 1367–1372. [Google Scholar] [CrossRef]
- Zhu, Y.; Yang, K.; Duan, R.; Wu, F. Sparse spatial spectral estimation with heavy sea bottom reverberation in the fractional Fourier domain. Appl. Acoust. 2017, 160, 107132. [Google Scholar] [CrossRef]
- Li, W.; Subrahmanya, N.; Xu, F. Online Subspace and Sparse Filtering for Target Tracking in Reverberant Environment. In Proceedings of the 2012 IEEE 7th Sensor Array and Multichannel Signal Processing Workshop (SAM), Hoboken, NJ, USA, 17–20 June 2012; pp. 329–332. [Google Scholar]
- Duan, R.; De Yang, K.; Chapman, N.R.; Ma, Y.L. Observing the fluctuations of arrival time and amplitude with short-range experimental data. Appl. Acoust. 2013, 74, 1297–1307. [Google Scholar] [CrossRef]
- Ge, F.; Chen, Y.; Li, W. Target Detecton and Tracking via Structured Convex Optimization. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 426–430. [Google Scholar]
- Yin, J.; Liu, B.; Zhu, G.; Xie, Z. Moving target detection using dynamic mode decomposition. Sensors 2018, 18, 3461. [Google Scholar] [CrossRef]
- Liu, B.; Yin, J.; Zhu, G. An active detection method for an underwater intruder using the alternating direction method of multipliers. J. Acoust. Soc. Am. 2019, 146, 4324–4332. [Google Scholar] [CrossRef]
- Xiang, W.; Song, Z.; Yang, W. Reverberation suppression for detecting underwater moving target based on robust autoencoder. Appl. Acoust. 2023, 206, 109301. [Google Scholar] [CrossRef]
- Zhu, Y.; Duan, R.; Yang, K. Reverberation suppression with the Grassmann manifold for a single ping scenario in deep sea. Acta Acust. 2023, 1, 58–66. (In Chinese) [Google Scholar]
- Cai, H.; Cai, J.; Wei, K. Accelerated alternating projections for robust principal component analysis. J. Mach. Learn. Res. 2019, 20, 1–33. [Google Scholar]
- Xiao, X.; Feng, X.; Yang, J. Reverberation suppression based on frequency-filtered tensor robust principal component analysis. Acta Acust. 2024, 4, 743–752. (In Chinese) [Google Scholar]
- Vandereycken, B. Low-rank matrix completion by Riemannian optimization. SIAM J. Optim. 2013, 23, 1214–1236. [Google Scholar] [CrossRef]
- Nie, R.; Liu, X.; Sun, C.; Zhou, Y. Multi-Ping Reverberation Suppression Combined with Spatial Continuity of Target Motion. In Proceedings of the 2021 OES China Ocean Acoustics (COA), Harbin, China, 14–17 July 2021; pp. 689–693. [Google Scholar]
- Liu, B. Study on Methods of Moving Target Detection in Reverberation Environment of Ice-Covered Sea. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2020; pp. 50–54. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).