
Compound Fault Diagnosis of Wind Turbine Gearbox via Modified Signal Quality Coefficient and Versatile Residual Shrinkage Network




Abstract
1. Introduction
- (1)
- The VRSN is proposed to diagnose compound faults in a wind turbine gearbox. Different from the probabilistic-based method, the proposed network is self-adaptive, and can identify single or simultaneous faults without manual intervention for empirical threshold setting;
- (2)
- The multithread network structure is constructed to optimize the computation resources’ configuration. Two parallel residual shrinkage networks can be implemented simultaneously to count the fault numbers and determine the fault probability distribution in responding to the real-time fault diagnosis task;
- (3)
- The denoised algorithm is designed to remove the noise components irrelevant to wind turbine operation status. The modified signal quality coefficient has the ability to balance the denoised effect and signal fidelity, and fault-sensitive features hidden in the originally collected signals can be captured precisely.
2. Theoretical Background
2.1. Deep Residual Shrinkage Network
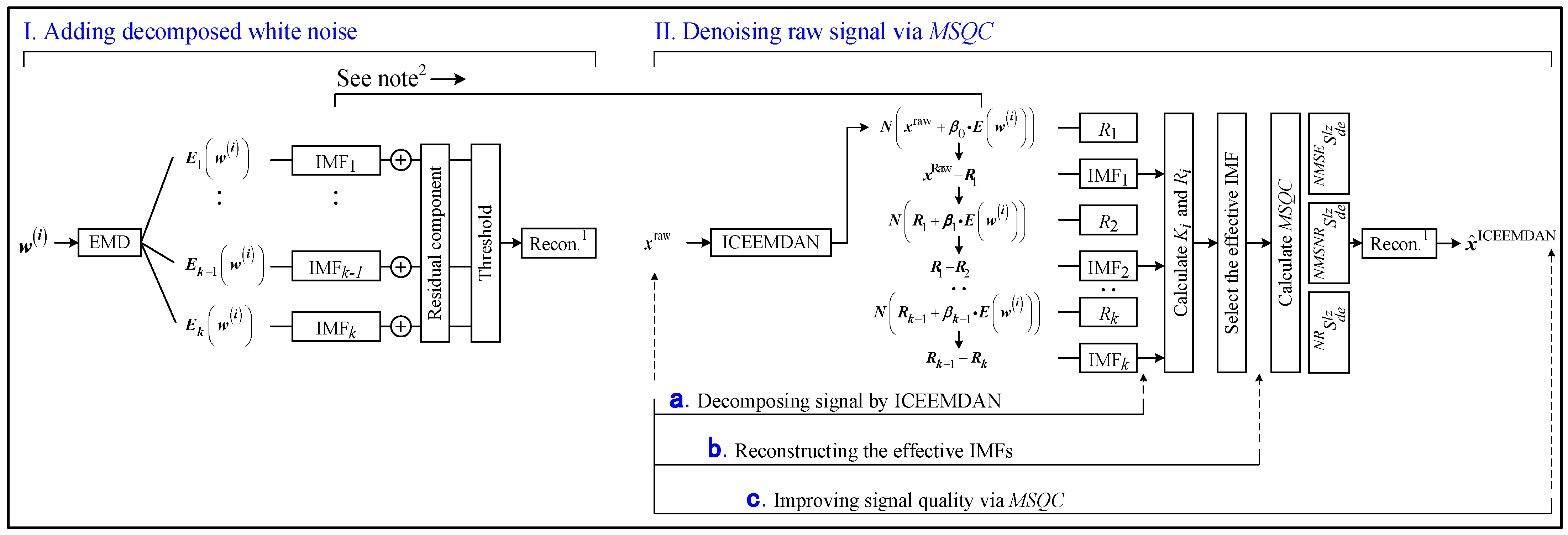
2.2. ICEEMDAN
3. Methodology
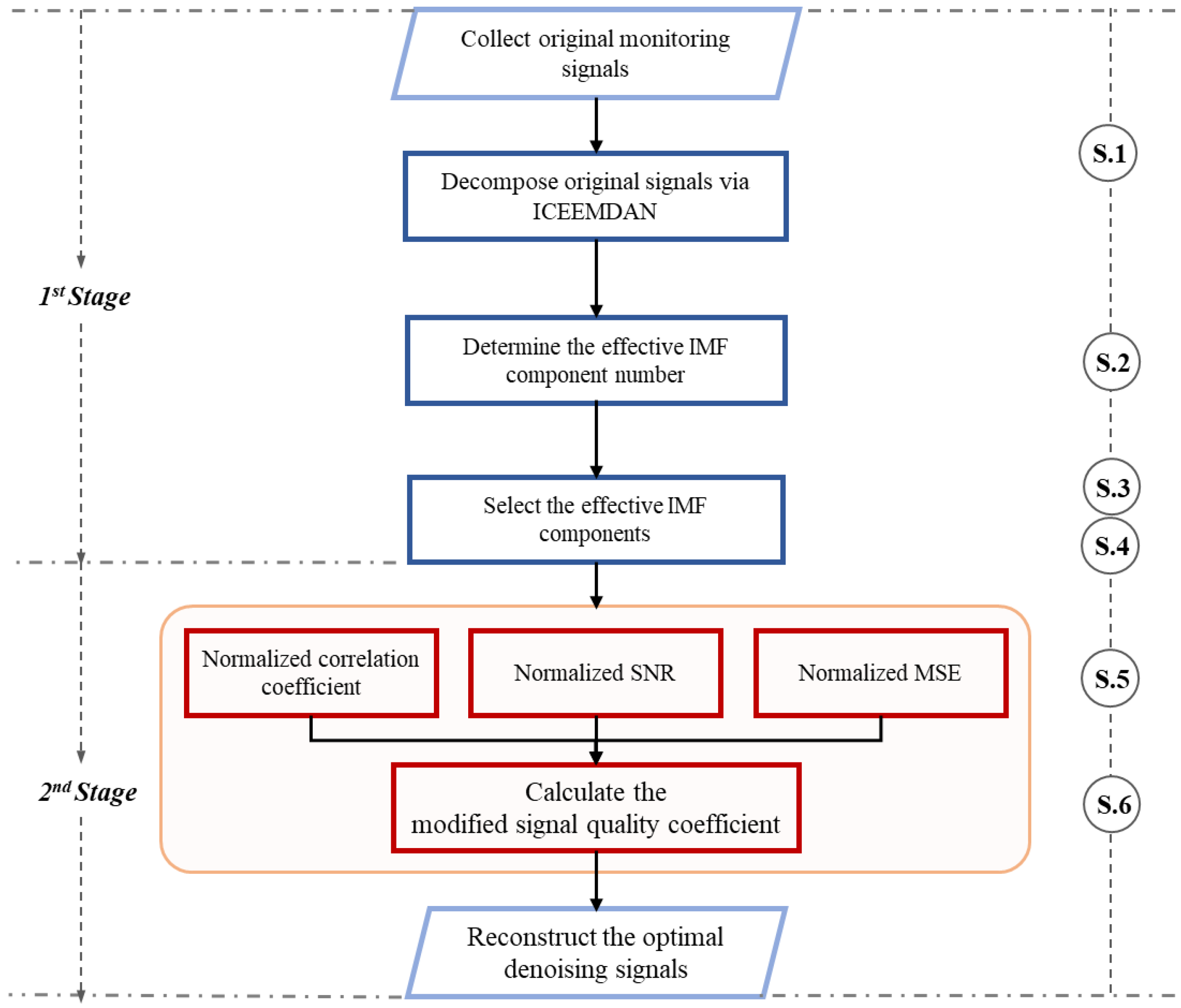
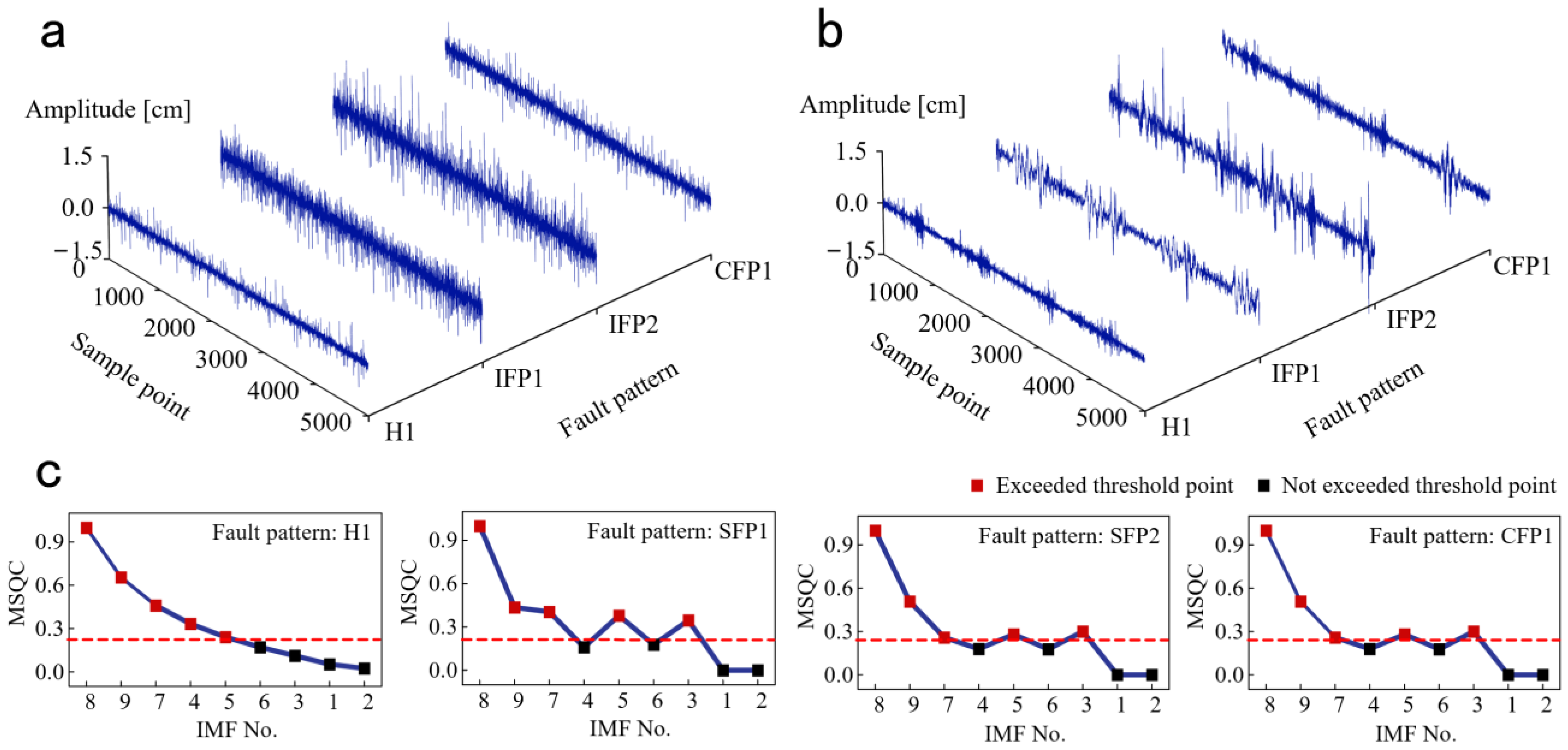
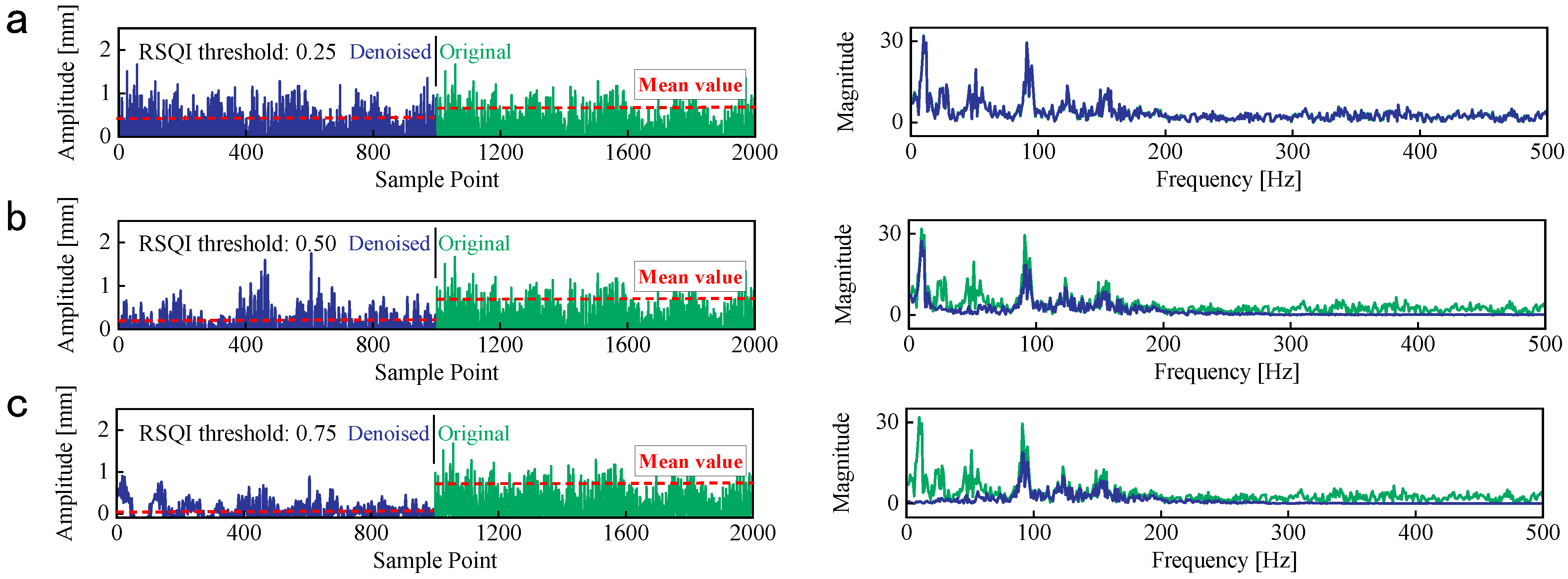
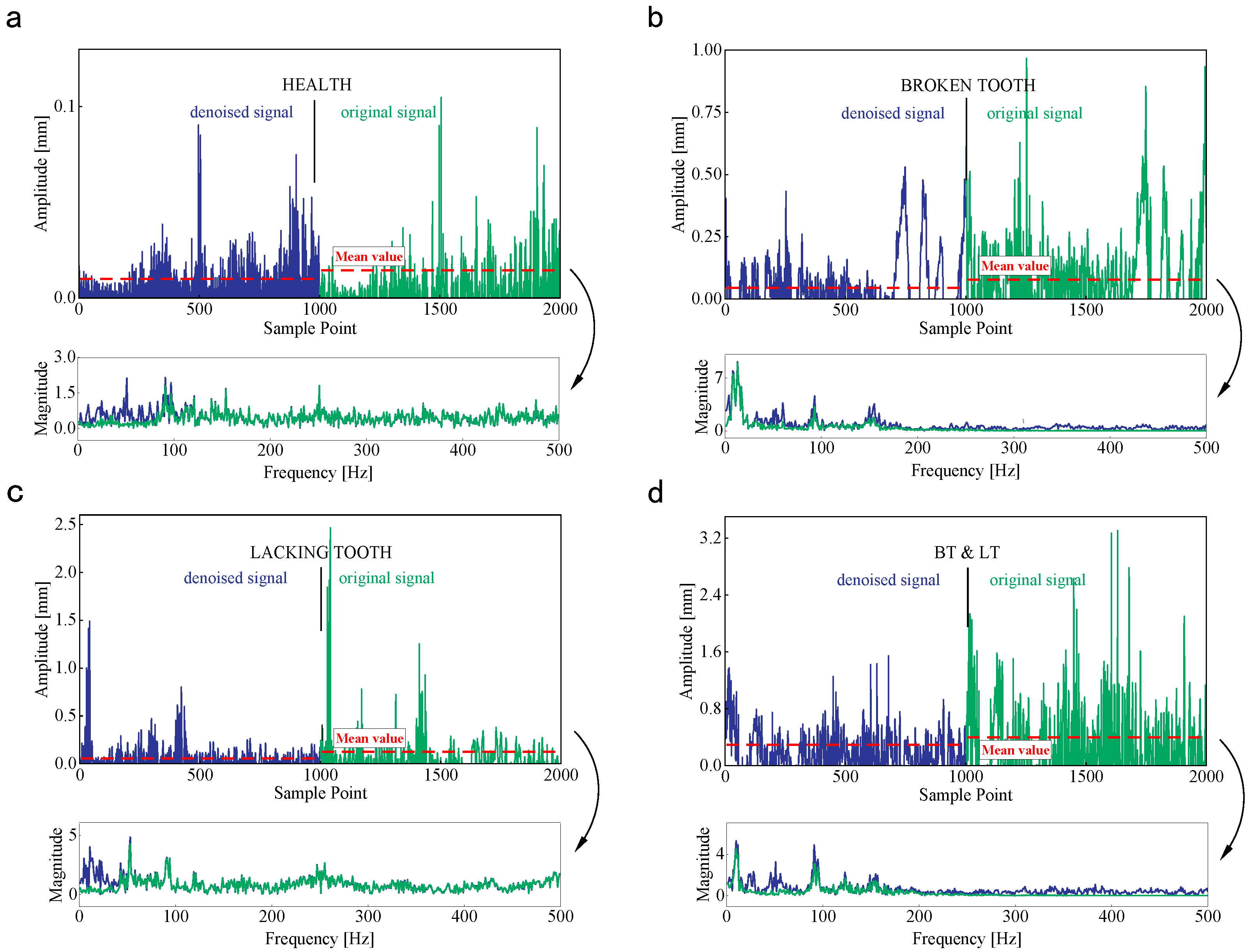
3.1. Modified Signal Quality Coefficient
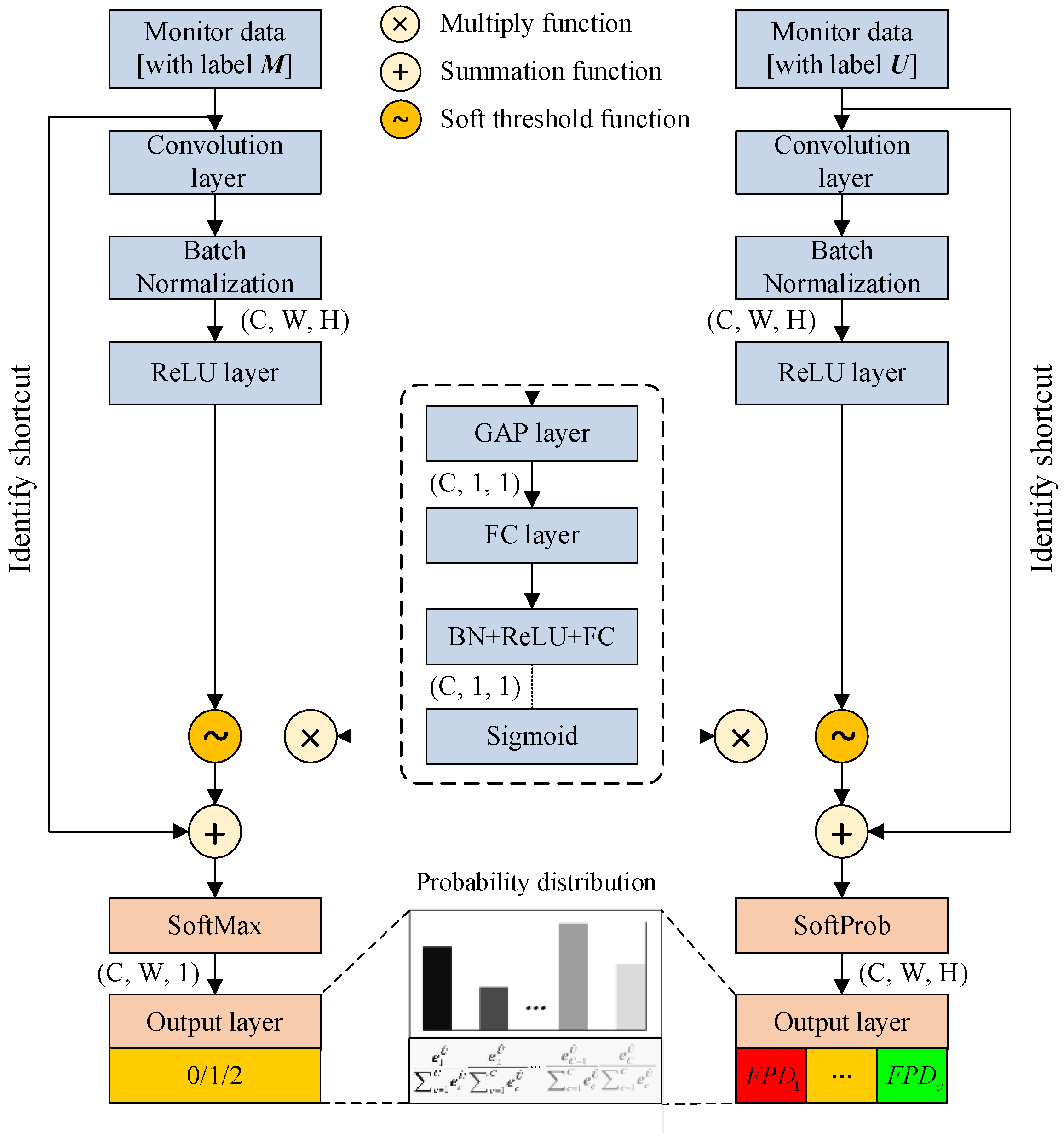
3.2. Versatile Residual Shrinkage Network
3.2.1. Counter-DRSN
3.2.2. Locator-DRSN
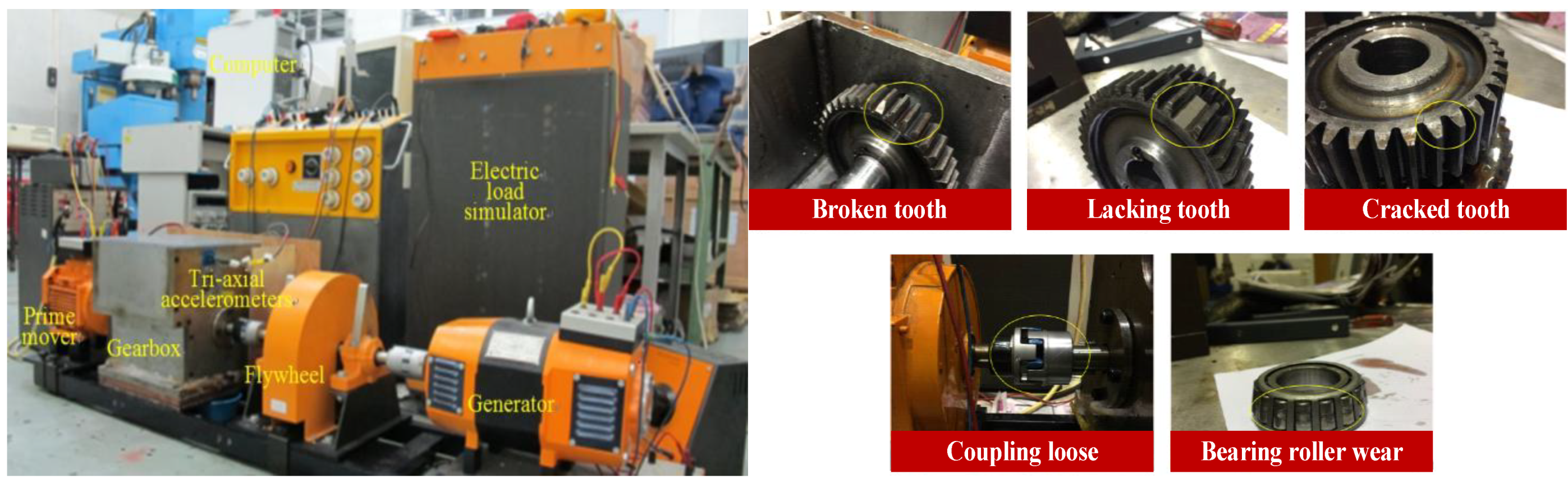
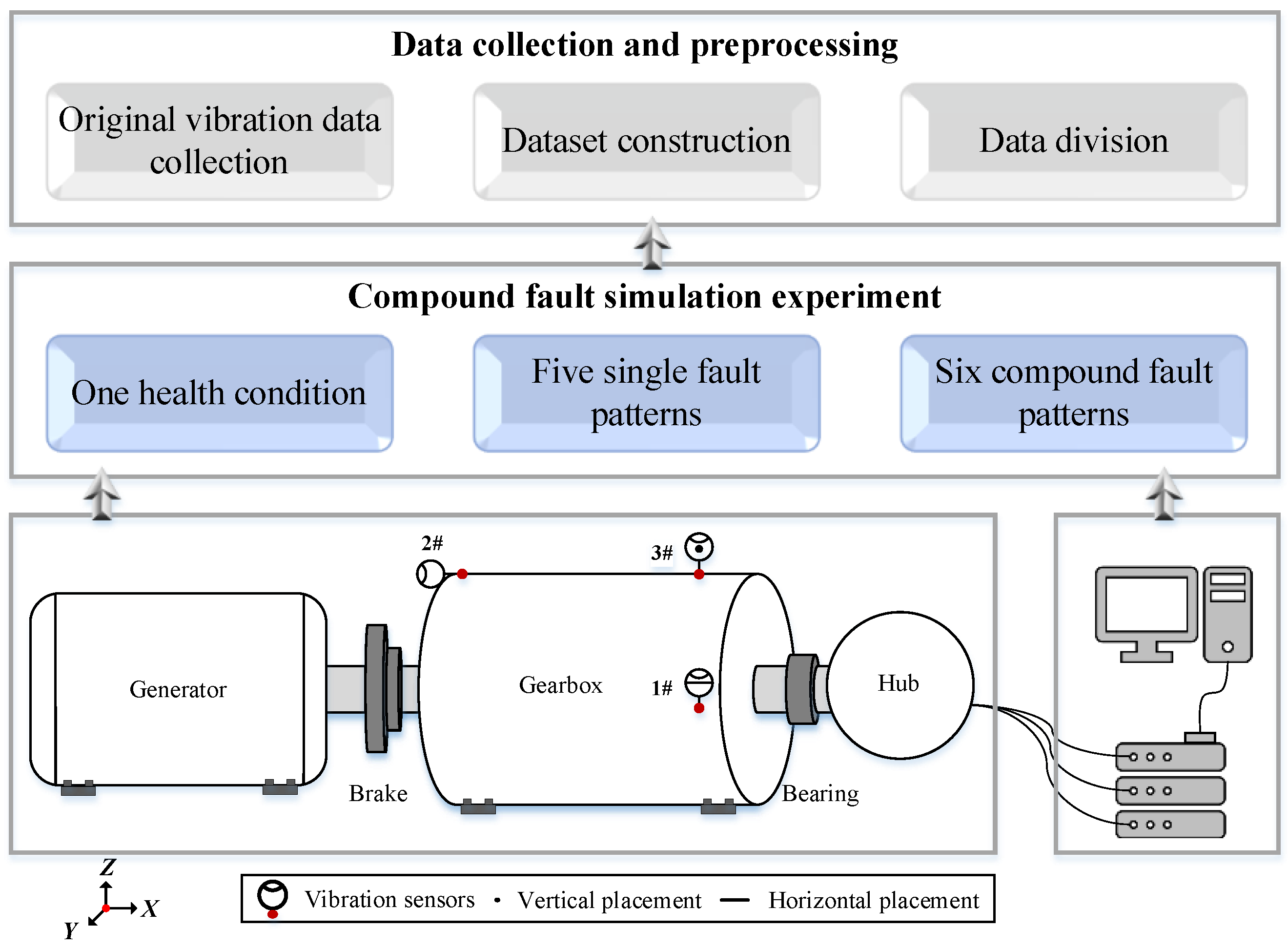
4. Experimental Study
5. Results and Discussion
5.1. Signal Denoised Performance
5.2. Diagnosis Result and Discussion
5.3. Comparison Analysis
6. Conclusions
- 1.
- The signal denoised algorithm is designed to remove the noise components irrelevant to wind turbine operation status. In this paper, the modified signal quality coefficient can balance the denoised effect and signal fidelity, and fault-sensitive features hidden in the original collected signals can be excavated precisely;
- 2.
- A versatile residual shrinkage network is constructed for the compound fault diagnosis. Unlike the probabilistic-based method, the proposed network is self-adaptive, and is used to identify single- or simultaneous-fault scenarios without the manual intervention required for setting the empirical threshold;
- 3.
- An effective multithread network structure is constructed to optimize the computation resource configuration. Two parallel residual shrinkage networks can be implemented simultaneously to count the number of faults and determine the fault probability distribution used for responding to a real-time fault diagnosis task.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, C.; Yang, J.; Jie, H.; Tian, B.; Zhao, Z.; Chang, Y. An uncertainty perception metric network for machinery fault diagnosis under limited noisy source domain and scarce noisy unknown domain. Adv. Eng. Inform. 2024, 62, 102682. [Google Scholar] [CrossRef]
- He, F.; Ye, Q. A bearing fault diagnosis method based on wavelet packet transform and convolutional neural network optimized by simulated annealing algorithm. Sensors 2022, 22, 1410. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Tian, B.; Yang, J.; Jie, H.; Chang, Y.; Zhao, Z. Neural-transformer: A brain-inspired lightweight mechanical fault diagnosis method under noise. Reliab. Eng. Syst. Safe. 2024, 251, 110409. [Google Scholar] [CrossRef]
- Mohammad, H.; Vlasic, F.; Zacek, J.; Maya, B.; Mazal, P. Using Acoustic Emission for Condition Monitoring of the Main Shaft Bearings in 4-Point Suspension Wind Turbine Drivetrains. Nondestruct. Test. Eval. 2023, 39, 2108–2131. [Google Scholar] [CrossRef]
- Tang, S.; Ma, J.; Yan, Z.; Zhu, Y.; Khoo, B.C. Deep transfer learning strategy in intelligent fault diagnosis of rotating machinery. Eng. Applartif. Intel. 2024, 134, 108678. [Google Scholar] [CrossRef]
- Yang, Z.X.; Wang, X.; Wong, P.K. Single and Simultaneous Fault Diagnosis with Application to a Multistage Gearbox: A Versatile Dual-ELM Network Approach. IEEE Trans. Ind. Inform. 2018, 14, 5245–5255. [Google Scholar] [CrossRef]
- Zhou, D.; Blaabjerg, F.; Franke, T.; Tønnes, M.; Lau, M. Comparison of Wind Power Converter Reliability with Low-Speed and Medium-Speed Permanent-Magnet Synchronous Generators. IEEE Trans. Ind. Electron. 2015, 62, 6575–6584. [Google Scholar] [CrossRef]
- Wong, P.K.; Zhong, J.; Yang, Z.; Vong, C.M. Sparse Bayesian Extreme Learning Committee Machine for Engine Simultaneous Fault Diagnosis. Neurocomputing 2016, 174, 331–343. [Google Scholar] [CrossRef]
- Clare, A.; King, R.D. Knowledge Discovery in Multi-Label Phenotype Data. In Principles of Data Mining and Knowledge Discovery; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2001; Volume 2168, pp. 42–53. [Google Scholar] [CrossRef]
- Zhang, M.L.; Zhou, Z.H. ML-KNN: A Lazy Learning Approach to Multi-Label Learning. Pattern Recognit. 2007, 40, 2038–2048. [Google Scholar] [CrossRef]
- Tahir, M.A.; Kittler, J.; Bouridane, A. Multi-Label Classification Using Stacked Spectral Kernel Discriminant Analysis. Neurocomputing 2016, 171, 127–137. [Google Scholar] [CrossRef]
- Liu, B.; Tsoumakas, G. Dealing with Class Imbalance in Classifier Chains via Random Undersampling. Knowl.-Based Syst. 2020, 192, 105292. [Google Scholar] [CrossRef]
- Wang, R.; Kwong, S.; Wang, X.; Jia, Y. Active k -Labelsets Ensemble for Multi-Label Classification. Pattern Recognit. 2021, 109, 107583. [Google Scholar] [CrossRef]
- Wang, L.; Chen, Z.; Zou, H.; Huang, D.; Pan, Y.; Cheang, C.F.; Li, J. A Deep Learning-Based High-Temperature Overtime Working Alert System for Smart Cities with Multi-Sensor Data. Nondestruct. Test. Eval. 2024, 39, 164–184. [Google Scholar] [CrossRef]
- Wang, L.; Cao, H.; Xu, H.; Liu, H. A Gated Graph Convolutional Network with Multi-Sensor Signals for Remaining Useful Life Prediction. Knowl.-Based Syst. 2022, 252, 109340. [Google Scholar] [CrossRef]
- Hassan, M.U.; Khan, T.; Zafar, T.; Yousuf, W.B.; Shah, A. Degradation Prognostics of Aerial Bundled Cables Based on Multi-Sensor Data Fusion. Nondestruct. Test. Eval. 2024, 40, 489–507. [Google Scholar] [CrossRef]
- Wang, Z.; He, X.; Yang, B.; Li, N. Subdomain Adaptation Transfer Learning Network for Fault Diagnosis of Roller Bearings. IEEE Trans. Ind. Electron. 2022, 69, 8430–8439. [Google Scholar] [CrossRef]
- Sahu, P.; Rai, R.; Patel, N. Deep learning-based fault classification of rolling bearings under noisy conditions using CEEMD-VMD-IMF with magnitude scalogram images. J. Mech. Sci. Technol. 2024, 10, 102409. [Google Scholar] [CrossRef]
- Lv, M.; Li, H. Nonlinear Dispersive Component Decomposition: Algorithm and Applications. IEEE Trans. Instrum. Meas. 2021, 70, 3515614. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, S.; Qiang, W.; Chen, Y.; Jing, L. Feature Extraction Framework Based on Contrastive Learning with Adaptive Positive and Negative Samples. Neural Netw. 2022, 156, 244–257. [Google Scholar] [CrossRef]
- Ding, K.; Chen, X.; Jiang, M.; Yang, H.; Chen, X.; Zhang, J.; Gao, R.; Cui, L. Feature extraction and fault diagnosis of photovoltaic array based on current–voltage conversion. Appl. Energy 2024, 353, 122135. [Google Scholar] [CrossRef]
- Hu, H.; Peng, G.; Wang, X.; Zhou, Z. Weld Defect Classification Using 1-D LBP Feature Extraction of Ultrasonic Signals. Nondestruct. Test. Eval. 2018, 33, 92–108. [Google Scholar] [CrossRef]
- Colominas, M.A.; Schlotthauer, G.; Torres, M.E. Improved Complete Ensemble EMD: A Suitable Tool for Biomedical Signal Processing. Biomed. Signal Process. Control 2014, 14, 19–29. [Google Scholar] [CrossRef]
- Miao, Y.; Zhang, B.; Li, C.; Lin, J.; Zhang, D. Feature Mode Decomposition: New Decomposition Theory for Rotating Machinery Fault Diagnosis. IEEE Trans. Ind. Electron. 2023, 70, 1949–1960. [Google Scholar] [CrossRef]
- Zhao, M.; Zhong, S.; Fu, X.; Tang, B.; Pecht, M. Deep Residual Shrinkage Networks for Fault Diagnosis. IEEE Trans. Ind. Inform. 2020, 16, 4681–4690. [Google Scholar] [CrossRef]
- Jiang, W.; Wu, J.; Zhu, H.; Li, X.; Gao, L. Paired Ensemble and Group Knowledge Measurement for Health Evaluation of Wind Turbine Gearbox under Compound Fault Scenarios. J. Manuf. Syst. 2023, 70, 382–394. [Google Scholar] [CrossRef]
- Liang, P.; Deng, C.; Wu, J.; Yang, Z.; Zhu, J.; Zhang, Z. Compound Fault Diagnosis of Gearboxes via Multi-Label Convolutional Neural Network and Wavelet Transform. Comput. Ind. 2019, 113, 103132. [Google Scholar] [CrossRef]
- Wang, S.; Shuai, H.; Hu, J.; Zhang, J.; Liu, S.; Yuan, X.; Liang, P. Few-shot fault diagnosis of axial piston pump based on prior knowledge-embedded meta learning vision transformer under variable operating conditions. Expert Syst. Appl. 2025, 269, 126452. [Google Scholar] [CrossRef]
- Yin, C.; Li, Y.; Wang, Y.; Dong, Y. Physics-guided degradation trajectory modeling for remaining useful life prediction of rolling bearings. Mech. Syst. Signal Pr. 2025, 224, 112192. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Pattern | Fault Description | Fault Label | Count Label | Training/Validation/Testing Number |
|---|---|---|---|---|
| H1 | Health (H1) | 0 | 0 | 1050/150/300 |
| SFP1 | Broken tooth (BT) | 1 | 1 | 1050/150/300 |
| SFP2 | Lacking tooth (LT) | 2 | 1 | 1050/150/300 |
| SFP3 | Cracked tooth (CT) | 3 | 1 | 1050/150/300 |
| SFP4 | Coupling loose (CL) | 4 | 1 | 1050/150/300 |
| SFP5 | Bearing roller wear (BRW) | 5 | 1 | 1050/150/300 |
| CFP1 | BT and LT | 1, 2 | 2 | 1050/150/300 |
| CFP2 | BT and CT | 1, 3 | 2 | 1050/150/300 |
| CFP3 | BT and CL | 1, 4 | 2 | 1050/150/300 |
| CFP4 | BT and BRW | 1, 5 | 2 | 1050/150/300 |
| CFP5 | LT and CL | 2, 4 | 2 | 1050/150/300 |
| CFP6 | LT and BRW | 2,5 | 2 | 1050/150/300 |
| Method No. | Diagnosis Strategies | Running Time (s) | Average Accuracy ± Standard deviation (%) | ||
|---|---|---|---|---|---|
| Training Set | Validation Set | Testing Set | |||
| Method 1 [8] | PPMLC | 57.95 | 86.98 ± 6.24 | 86.12 ± 6.78 | 86.03 ± 6.89 |
| Method 2 | PPMLC with MSQC | 75.34 | 89.87 ± 5.12 | 88.54 ± 5.64 | 88.32 ± 5.79 |
| Method 3 [13] | RAKEL | 81.34 | 82.34 ± 7.81 | 81.83 ± 8.12 | 81.54 ± 8.34 |
| Method 4 | RAKEL with MSQC | 102.54 | 86.73 ± 6.875 | 84.57 ± 7.51 | 84.53 ± 7.53 |
| Method 5 [6] | Dual-ELM | 21.75 | 83.64 ± 7.84 | 82.57 ± 7.96 | 82.53 ± 7.99 |
| Method 6 | Dual-ELM with MSQC | 39.57 | 87.51 ± 6.57 | 86.54 ± 6.89 | 85.98 ± 7.23 |
| Method 7 [27] | WT-MLCNN | 207.24 | 93.76 ± 3.251 | 92.87 ± 3.427 | 92.72 ± 3.457 |
| Method 8 | WT-MLCNN with MSQC | 231.25 | 98.37 ± 1.387 | 95.81 ± 2.101 | 95.83 ± 2.024 |
| Method 9 (Ours) | The proposed method | 52.34 | 98.54 ± 1.360 | 96.34 ± 1.785 | 96.26 ± 1.823 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, W.; Zhao, G.; Gao, Z.; Wang, Y.; Wu, J. Compound Fault Diagnosis of Wind Turbine Gearbox via Modified Signal Quality Coefficient and Versatile Residual Shrinkage Network. Sensors 2025, 25, 913. https://doi.org/10.3390/s25030913
Jiang W, Zhao G, Gao Z, Wang Y, Wu J. Compound Fault Diagnosis of Wind Turbine Gearbox via Modified Signal Quality Coefficient and Versatile Residual Shrinkage Network. Sensors. 2025; 25(3):913. https://doi.org/10.3390/s25030913
Chicago/Turabian StyleJiang, Weixiong, Guanhui Zhao, Zhan Gao, Yuanhang Wang, and Jun Wu. 2025. "Compound Fault Diagnosis of Wind Turbine Gearbox via Modified Signal Quality Coefficient and Versatile Residual Shrinkage Network" Sensors 25, no. 3: 913. https://doi.org/10.3390/s25030913
APA StyleJiang, W., Zhao, G., Gao, Z., Wang, Y., & Wu, J. (2025). Compound Fault Diagnosis of Wind Turbine Gearbox via Modified Signal Quality Coefficient and Versatile Residual Shrinkage Network. Sensors, 25(3), 913. https://doi.org/10.3390/s25030913