
Center of Mass Estimation During Single-Leg Standing Using a Force Platform and Inertial Sensors


Abstract
1. Introduction
2. Estimation Methods
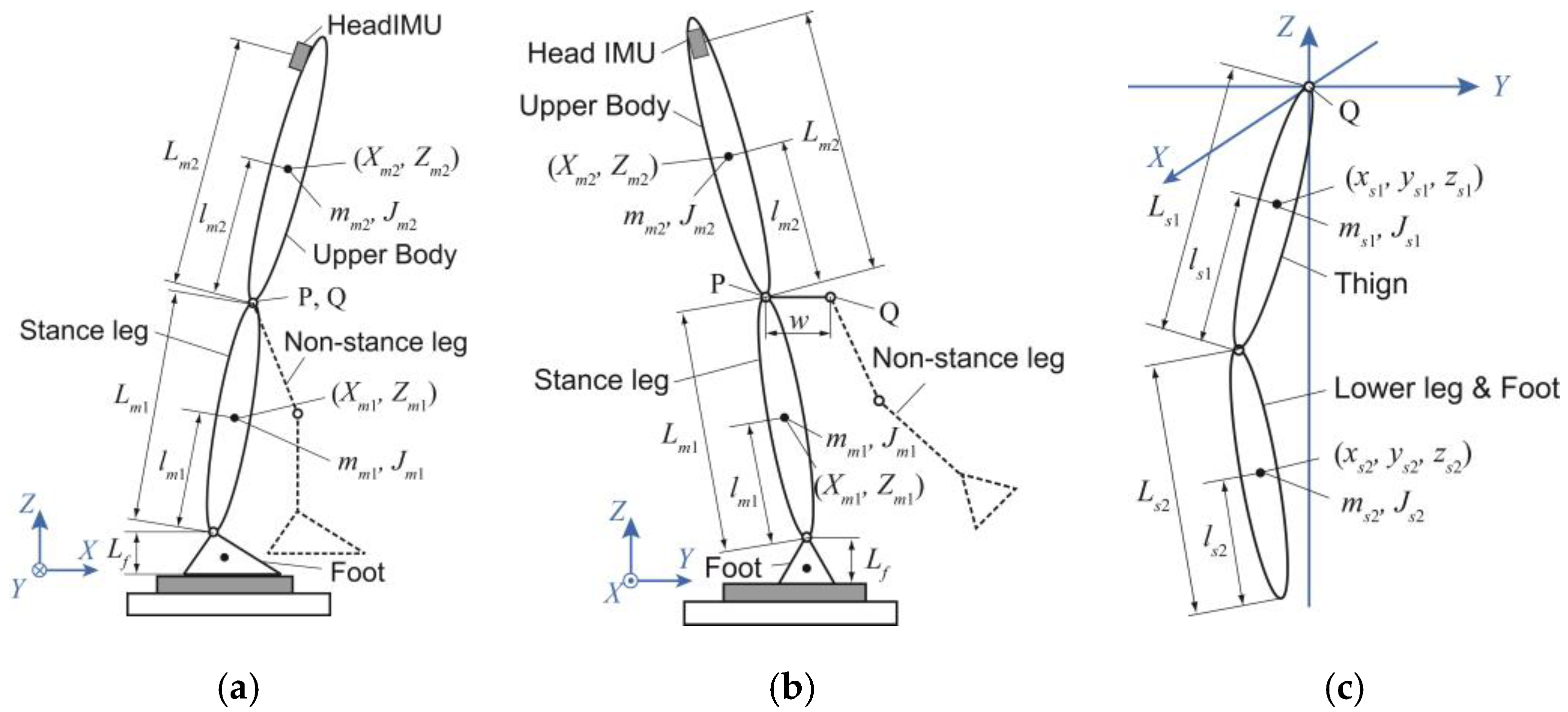
2.1. Mechanical Models
2.2. Force and COM Estimation from Subsystem
2.3. COM Estimation
3. Experiments
3.1. Experimental Protocol
3.2. Experimental Equipment
3.3. Post-Processing
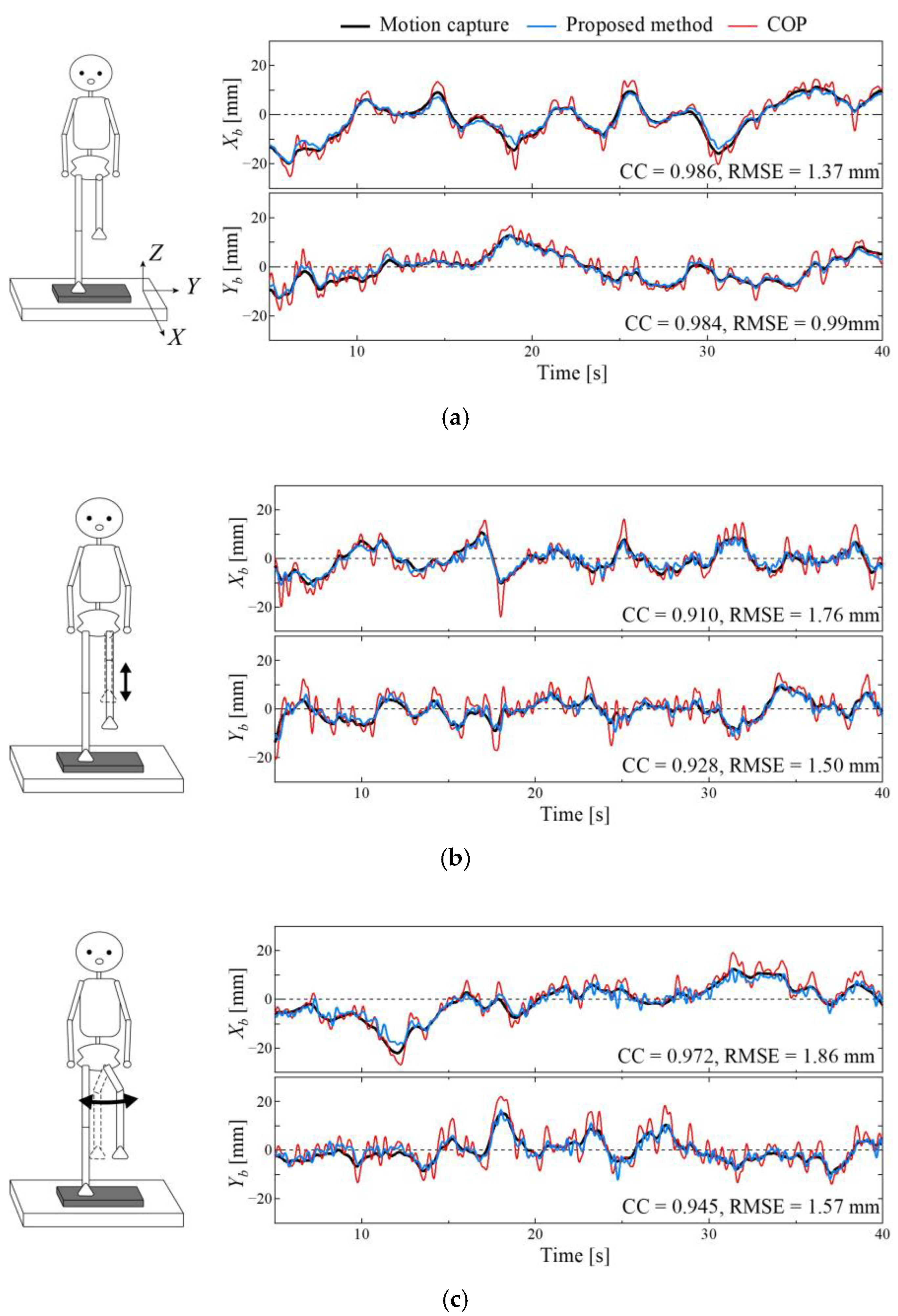
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kelly, L.A.; Kuitunen, S.; Racinais, S.; Cresswell, A.G. Recruitment of the plantar intrinsic foot muscles with increasing postural demand. Clin. Biomech. 2012, 27, 46–51. [Google Scholar] [CrossRef] [PubMed]
- Law, N.Y.; Li, J.X. Effects of a 12-week online Tai Chi intervention on gait and postural stability in individuals with Parkinson’s disease. Sports Med. Health Sci. 2023, 5, 239–244. [Google Scholar] [CrossRef] [PubMed]
- Bonora, G.; Mancini, M.; Carpinella, I.; Chiari, L.; Ferrarin, M.; Nutt, J.G.; Horak, F.B. Investigation of anticipatory postural adjustments during one-leg stance using inertial sensors: Evidence from subjects with parkinsonism. Front. Neurol. 2017, 8, 361. [Google Scholar] [CrossRef]
- Novaes, M.; Carvalho, A.; Sauer, J.F.; Brech, G.C.; Helito, C.P.; João, S.M.A. Postural control during single leg stance in individuals with clinical indication for combined reconstruction of the anterior cruciate and the anterolateral ligaments of the knee: A cross-sectional study. BMC Musculoskelet. Disord. 2022, 23, 383. [Google Scholar] [CrossRef]
- Nordling, Y.; Sund, R.; Sirola, J.; Kröger, H.; Isanejad, M.; Rikkonen, T. Body composition, balance, functional capacity and falls in older women. Aging Clin. Exp. Res. 2024, 36, 76. [Google Scholar] [CrossRef]
- Kozinc, Ž.; Trajković, N.; Šarabon, N. Transient characteristics of body sway during single-leg stance in athletes with a history of ankle sprain. Gait Posture 2021, 86, 205–210. [Google Scholar] [CrossRef]
- Promsri, A.; Haid, T.; Federolf, P. How does lower limb dominance influence postural control movements during single leg stance? Hum. Mov. Sci. 2018, 58, 165–174. [Google Scholar] [CrossRef]
- Kozinc, Ž.; Šarabon, N. The effects of leg preference on transient characteristics of body sway during single-leg stance: A cross-sectional study. Front. Hum. Neurosci. 2021, 14, 617222. [Google Scholar] [CrossRef]
- Vieira, O.; Coelho, D.B.; Teixeira, L.A. Asymmetric balance control between legs for quiet but not for perturbed stance. Exp. Brain Res. 2014, 232, 3269–3276. [Google Scholar] [CrossRef]
- Oshita, K.; Yano, S. Relationship between force fluctuation in the plantar flexor and sustainable time for single-leg standing. J. Physiol. Anthropol. 2010, 29, 89–93. [Google Scholar] [CrossRef]
- Winter, D.A.; Patla, A.E.; Prince, F.; Ishac, M.; Gielo-Perczak, K. Stiffness control of balance in quiet standing. J. Neurophysiol. 1998, 80, 1211–1221. [Google Scholar] [CrossRef] [PubMed]
- Yu, E.; Abe, M.; Masani, K.; Kawashima, N.; Eto, F.; Haga, N.; Nakazawa, K. Evaluation of postural control in quiet standing using center of mass acceleration: Comparison among the young, the elderly, and people with stroke. Arch. Phys. Med. Rehabil. 2008, 89, 1133–1139. [Google Scholar] [CrossRef] [PubMed]
- Richmond, S.B.; Fling, B.W.; Lee, H.; Peterson, D.S. The assessment of center of mass and center of pressure during quiet stance: Current applications and future directions. J. Biomech. 2021, 123, 110485. [Google Scholar] [CrossRef] [PubMed]
- Germanotta, M.; Mileti, I.; Conforti, I.; Del Prete, Z.; Aprile, I.; Palermo, E. Estimation of human center of mass position through the inertial sensors-based methods in postural tasks: An accuracy evaluation. Sensors 2021, 21, 601. [Google Scholar] [CrossRef] [PubMed]
- Zatsiorsky, V.M.; King, D.L. An algorithm for determining gravity line location from posturographic recordings. J. Biomech. 1998, 31, 161–164. [Google Scholar] [CrossRef]
- Sonobe, M.; Inoue, Y. Center of mass estimation using a force platform and inertial sensors for balance evaluation in quiet standing. Sensors 2023, 23, 4933. [Google Scholar] [CrossRef]
- Ae, M.; Tang, H.; Yokoi, T. Estimation of inertia properties of the body segments in Japanese athletes. Biomechanisms 1992, 11, 23–33. [Google Scholar] [CrossRef]
- Contini, R. Body segment parameters, Part II. Artif. Limbs 1972, 16, 1–19. [Google Scholar]
- Nakanishi, R.; Sonobe, M.; Hirose, K. Stride estimation based on horizontal acceleration integration using an inertial sensor. Trans. JSME 2023, 89, 23–00194. [Google Scholar] [CrossRef]
- Seel, T.; Raisch, J.; Schauer, T. IMU-based joint angle measurement for gait analysis. Sensors 2014, 14, 6891. [Google Scholar] [CrossRef]
- Hirono, T.; Ikezoe, T.; Taniguchi, M.; Yamagata, M.; Miyakoshi, K.; Umehara, J.; Ichihashi, N. Relationship between ankle plantar flexor force steadiness and postural stability on stable and unstable platforms. Eur. J. Appl. Physiol. 2020, 120, 1075–1082. [Google Scholar] [CrossRef]
- Munoz-Martel, V.; Santuz, A.; Ekizos, A.; Arampatzis, A. Neuromuscular organisation and robustness of postural control in the presence of perturbations. Sci. Rep. 2019, 9, 12273. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
| Segment | Symbol | Value | Segment | Symbol | Value |
|---|---|---|---|---|---|
| Upper body | mm2 | 0.656 M | Thigh | ms1 | 0.110 M |
| Jm2, x | 1.30 × 10−2 MH2 | Js1, x | 4.81 × 10−4 MH2 | ||
| Jm2, y | 1.10 × 10−2 MH2 | Js1, y | 5.10 × 10−4 MH2 | ||
| lm2 | 0.169 H | Js1, z | 1.53 × 10−4 MH2 | ||
| Lm2 | 0.406 H | ls1 | 0.129 H | ||
| Stance leg | mm1 | 0.161 M | Ls1 | 0.245 H | |
| Jm1, x | 2.53 × 10−3 MH2 | Lower leg & Foot (Non-stance) | ms2 | 0.062 M | |
| Jm1, y | 2.56 × 10−3 MH2 | Js2, x | 4.86 × 10−4 MH2 | ||
| lm1 | 0.302 H | Js2, y | 4.92 × 10−4 MH2 | ||
| Lm1 | 0.491 H | Js2, z | 2.89 × 10−4 MH2 | ||
| Foot (Stance) | mf | 0.011 M | ls2 | 0.155 H | |
| Lf | 0.039 H | Ls2 | 0.285 H | ||
| Whole body | lm | 0.589 H | M: Body mass [kg], H: Height [m] | ||
| w | 0.100 H | ||||
| (A) | (B) | (C) | |
|---|---|---|---|
| Sagittal plane | 0.985 ± 0.008 | 0.930 ± 0.051 | 0.920 ± 0.044 |
| Frontal plane | 0.951 ± 0.060 | 0.904 ± 0.081 | 0.877 ± 0.048 |
| (A) | (B) | (C) | ||
|---|---|---|---|---|
| Sagittal plane | RMS | 6.14 ± 1.43 | 6.28 ± 1.54 | 5.36 ± 1.16 |
| [mm] | RMSE | 1.18 ± 0.30 | 2.14 ± 0.64 | 2.06 ± 0.67 |
| Frontal plane | RMS | 4.21 ± 0.59 | 4.64 ± 0.71 | 4.56 ± 0.89 |
| [mm] | RMSE | 1.26 ± 0.69 | 1.99 ± 0.73 | 2.30 ± 0.62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Takahashi, R.; Sonobe, M. Center of Mass Estimation During Single-Leg Standing Using a Force Platform and Inertial Sensors. Sensors 2025, 25, 871. https://doi.org/10.3390/s25030871
Takahashi R, Sonobe M. Center of Mass Estimation During Single-Leg Standing Using a Force Platform and Inertial Sensors. Sensors. 2025; 25(3):871. https://doi.org/10.3390/s25030871
Chicago/Turabian StyleTakahashi, Ryosuke, and Motomichi Sonobe. 2025. "Center of Mass Estimation During Single-Leg Standing Using a Force Platform and Inertial Sensors" Sensors 25, no. 3: 871. https://doi.org/10.3390/s25030871
APA StyleTakahashi, R., & Sonobe, M. (2025). Center of Mass Estimation During Single-Leg Standing Using a Force Platform and Inertial Sensors. Sensors, 25(3), 871. https://doi.org/10.3390/s25030871