1. Introduction
Autonomous underwater vehicles (AUVs) integrating acoustic communication, intelligent control, energy storage, and multi-sensor technologies, are precocious unmanned underwater platforms possessing strong autonomy, superior concealment, and extensive operational ranges [
1]. Their navigation systems typically rely on filtering algorithms for precise positioning. In view of the rapid attenuation of electromagnetic waves in water renders, conventional satellite navigation is unusable, which poses significant challenges to underwater navigation research [
2].
Strapdown inertial navigation systems (SINSs) are generally employed for AUV autonomous navigation, offering advantages such as excellent stealth, high data rates, and comprehensive navigation parameters [
3]. Nevertheless, SINS navigation errors accumulate over time. To alleviate error, auxiliary correction methods are typically adopted, mainly in two ways: first, periodic surfacing to receive satellite signals or other radio signals for position correction; second, utilization of underwater acoustic positioning technology to provide position information [
4]. The Doppler Velocity Log (DVL)/SINS integrated navigation system is currently the most prevalent underwater AUV navigation system. The key factor in the integrated navigation approach is the fusion filtering algorithm. Numerous filtering methods have been proposed by researchers worldwide, with the Kalman filter receiving significant attention owing to its distinct advantages [
5].
The Kalman filter has the characteristic of dealing with objects that are high-dimensional, nonstationary, and time-varying. As a recursive algorithm, it is particularly suitable for computer implementation. Therefore, since the Kalman filter was proposed, it has been widely used in the engineering field [
6]. Kalman filtering is applicable to linear system models. In practical engineering applications, an integrated navigation system usually contains certain nonlinear characteristics. If Kalman filtering is directly used for filtering calculations, model approximation errors may be introduced [
7]. Therefore, improved methods are constantly being evolved, among which the Extended Kalman Filter (EKF) and the Unscented Kalman Filter (UKF) are widely used. The EKF algorithm performs first-order linearization truncation on the Taylor expansion of the nonlinear state function and the measurement function and transforms the nonlinear filtering into a linear filtering problem. This algorithm is simple to calculate and has a fast convergence rate [
8]. However, EKF has some shortcomings, such as the error caused by linearization truncation and the need to calculate the Jacobian matrix of the nonlinear function (the calculation load of the matrix in the computer increases significantly with the increase in the navigation filtering data dimension), which may lead to the inability of an unmanned vehicle to make timely control decisions when completing a task and even cause delays, resulting in task failure [
9]. The UKF algorithm uses UT (Unscented Transformation) to approximate the posterior probability density of the nonlinear system and selects several points in the original state distribution according to certain rules so that the average covariance of each point is equal to the average covariance of the original state, so as to achieve the purpose of being fast and efficient [
10]. This method does not require linearization of the function, nor does it need to ignore the high-order terms of the function. Therefore, the function obtained by this method has higher mean and covariance estimation accuracy [
11].
Compared with the EKF, the UKF is simpler in terms of calculation and has high filtering accuracy. It has been widely used in the filtering solution of nonlinear equations. However, there are still problems of low filtering accuracy and even divergence [
12]. Reference [
13] proposed an asynchronous adaptive direct Kalman filter (AADKF) algorithm for an underwater integrated navigation system. The algorithm improves navigation accuracy by adaptively adjusting the measurement noise variance matrix and solves the problem of unknown measurement covariance matrices and their variation over time. Luo et al. [
14] proposed a robust Kalman filter to eliminate process uncertainties and measurement anomalies caused by severe maneuvering, thereby improving navigation accuracy. Aiming at the large initial heading errors and horizontal attitude errors that may occur in AUVs, Lu Zhang et al. [
15] proposed a new nonlinear attitude error model based on the square-root information filter (SR-CIF), which significantly improved the convergence rate of the initial alignment of a strapdown inertial navigation system. At present, research on the Kalman filter algorithm is still in progress. He Shan et al. [
16] introduced an enhanced strong tracking quadrature Kalman filter algorithm. The incorporation of strong tracking filtering concepts into the nonlinear filtering framework resulted in improved filtering accuracy; however, issues of misjudgment and divergence persist. Ye Chen et al. [
17] presented a strong tracking UKF algorithm. Through the refinement of the strong tracking filter, an algorithm with heightened accuracy and enhanced noise resistance was developed and applied to AUVs, yet there remains scope for efficiency enhancement. Chen Xiaofeng [
18] proposed an integrated navigation method based on a strong tracking Unscented Kalman Filter algorithm. By combining the strong tracking algorithm with the Unscented Kalman Filter algorithm, the filtering accuracy error was reduced, but there is still a situation where the computational power is more complex. Chen Guangwu [
19] proposed an integrated navigation algorithm based on an adaptive interacting multiple Kalman filter model. By calculating the residuals, the observation likelihood of the model is adaptively adjusted to improve the performance of state estimation. However, there are still some errors when the algorithm is applied underwater. In reference [
20], a fault processing algorithm based on the Federated Kalman Filter (FKF), which combines the time update value of the fault sub-filter adaptively, was proposed. The FKF in the integrated navigation system was improved, reducing the pollution to other sub-filters caused by feedback and reducing abnormal positioning caused by faults. However, the noise processing ability is still weak, and the algorithm proposed in this paper has a better performance in noise processing, which can better increase the stability of submersibles and the accuracy of navigation. González et al. [
21], in their research, combined the EKF with sonar data; the improved Kalman filter method significantly improved the navigation accuracy of underwater AUVs in deep-sea areas. However, when the statistical characteristics of the equivalent measurement noise change, the measurement rate and navigation accuracy decrease. These methods have the problems of insufficient computing power and insufficient accuracy in complex environments [
22,
23,
24]. With the emergence of deep learning neural networks, the development of data-driven autonomous navigation control strategies has been overtaken. Methods of learning how to avoid collisions based on supervised deep learning path planning are becoming more and more popular. Wang et al. [
25,
26,
27,
28] designed the integral backstepping method to design a controller and realized the global trajectory tracking of mobile robots. The algorithm is simple and easy to transplant. Chen Ziyin et al. [
29] proposed a backstepping control method based on feedback gain. By combining neural network control methods, the problem of depth control of autonomous underwater vehicles was solved. Gao [
30] proposed an adaptive PD control algorithm, which has good stability and adaptability in following a preset trajectory. In particular, with the latest development of DL, the combination of deep continuous conditional random domains and deep convolutional neural networks is used to improve the accuracy of depth prediction [
31]. These navigation methods indeed improve the navigation accuracy of unmanned underwater vehicles and are easy to combine and adjust. However, these methods also have certain defects, such as cumbersome control processes, complex environmental perception, and imprecise and updated system models. The algorithm proposed in this paper can reduce the impact of noise and other environmental conditions on underwater vehicles to improve the stability of submersibles [
32,
33].
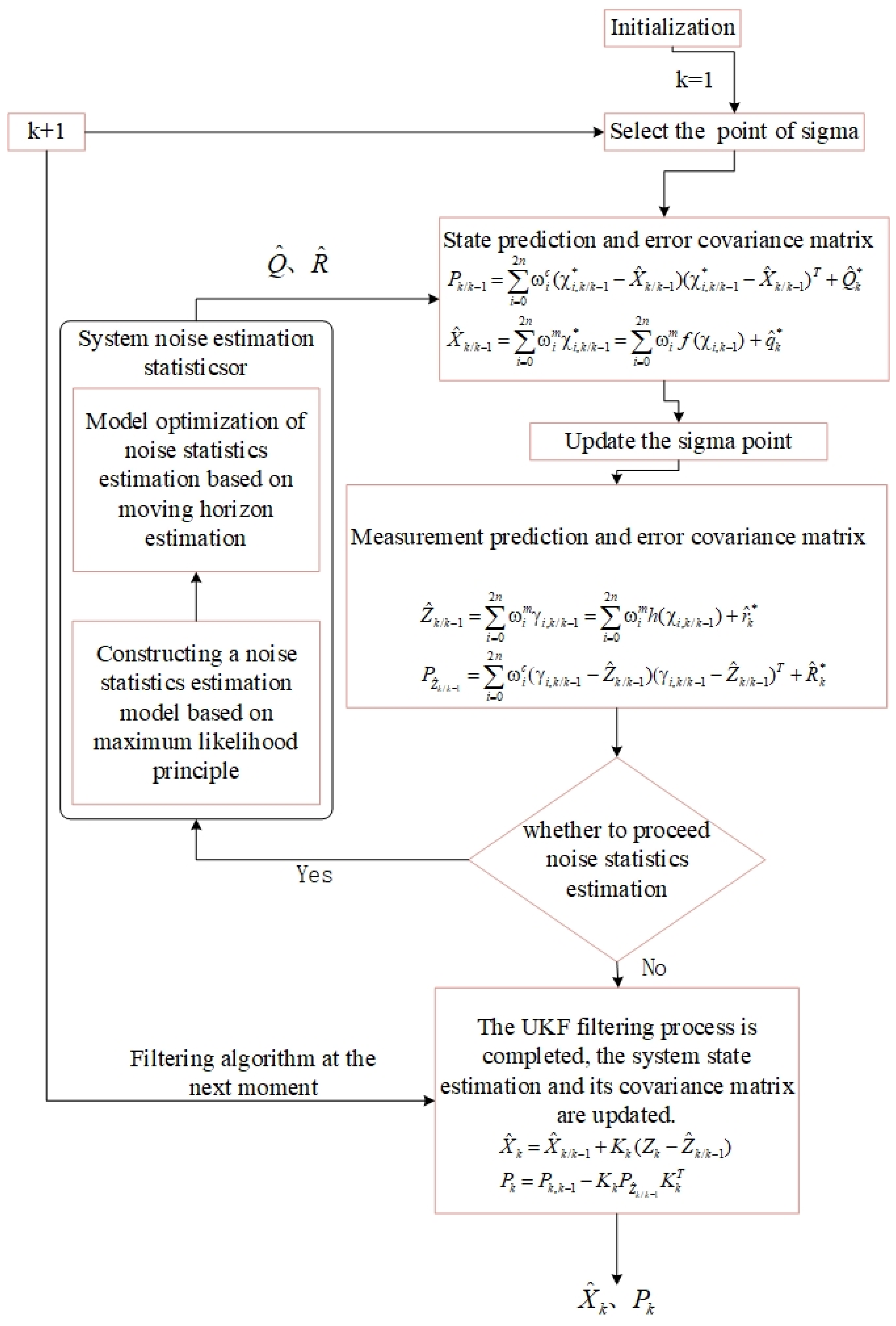
In this paper, the Unscented Kalman Filter algorithm is optimized by introducing rolling-time-domain estimation, and the Newton–Raphon algorithm is used to solve the maximum likelihood estimation of noise statistics, aiming to reduce noise interference for submersibles and ensure that underwater vehicles can complete tasks smoothly in complex environments.
In view of the problems existing in the above methods, this paper proposes an adaptive filtering algorithm (RHAUKF) based on the maximum likelihood criterion and rolling-time-domain estimation. The main research work was as follows: (1) The Unscented Kalman Filter (UKF) was analyzed and an adaptive filtering algorithm (RHAUKF) was proposed. (2) A filtering scheme and simulation model suitable for the SINS/DVL integrated navigation system were designed, and the RHAUKF algorithm, the ARUKF algorithm, and the UKF algorithm were analyzed and compared with the model. Through the above research and comparison, it is hoped that the algorithm will better meet the working requirements of submersibles.
The remainder of this paper is structured as follows:
Section 2 provides the basic form of the algorithm proposed in this paper. In
Section 3, an adaptive UKF algorithm based on the maximum likelihood criterion and moving-horizon estimation is proposed, and the derivation process and implementation steps of the algorithm are briefly introduced. In
Section 4, the correctness and feasibility of the three algorithms are verified, and through a comparison with the UKF algorithm and the ARUKF algorithm, the superiority of the proposed algorithm is highlighted.
Section 5 is a summary of this article and an overview of the conclusions.
Table 1 presents the abbreviations, symbols and their corresponding meanings used in this paper;
Table 2 summarizes the results of the literature review.
4. Simulation Experiments and Analysis
This section presents simulation results comparing the performance of the UKF, ARUKF, and RHAUKF algorithms under noisy conditions. The Lie-group-based strapdown inertial navigation error model was employed. The trajectory of an underwater vehicle was simulated using MATLAB 2022 software, based on typical vehicle motion profiles. The results were analyzed and compared using the root mean square error (RMSE) and bias (BIAS). The root mean square error (RMSE), calculated using Equation (40), served as the performance metric to evaluate the accuracy and stability of the prediction models. A lower RMSE indicates a smaller difference between predicted and actually observed values, signifying higher prediction accuracy. Conversely, a higher RMSE indicates greater deviation and lower accuracy. BIAS refers to the systematic difference between the estimated value and the real parameter value. Using Formula (41) for calculation and comparison, a higher BIAS value shows that the model is too simple to capture the complex distribution of data, resulting in underfitting, and vice versa.
where
is the estimated value of
in the nth simulation experiment, M is the time period of the simulation experiment,
denotes the sign of the expectation (i.e., the mean),
denotes the model’s prediction of a given input, and
denotes the real function value.
Figure 3 illustrates the simulated trajectories. Trajectories 1 and 6 represent constant horizontal velocities, trajectory 2 represents an ascent, trajectories 3 and 4 represent turns, and trajectory 5 represents a descent. These trajectories represent typical underwater vehicle maneuvers relevant to underwater navigation applications.
According to the trajectory profiles described above, the proposed RHAUKF algorithm was implemented within a Lie group-based strapdown inertial navigation error model. Its performance was compared with that of the standard UKF and the ARUKF algorithms previously discussed, all within the context of underwater navigation.
The initial position of the underwater vehicle (UUV) was set at a longitude (L) = 112.532° E, a latitude (λ) = 37.8° N, and a depth = 50 m, with a target final position error of 0. The Earth’s rotation rate is ; the variation of gravity (g) with latitude was neglected, and g was set to 9.78 m/s2. The initial UUV velocities were 5 m/s eastward, 0 m/s northward, and 0 m/s downward, with initial velocity errors of 0.1 m/s in all three directions. For the simulation, constant gyro drifts of 0.1°/h and random drifts of 0.01°/h were assumed along all three axes (east, north, and down). The accelerometer bias was set to g, with a random drift of .
The initial alignment error of the strapdown inertial navigation system was 0, and the initial attitude (heading angle, pitch angle, and roll angle) errors of the carrier were selected as (1°, 1°, 1°), (0.7°, 0.7°, 0.7°), and (0.5°, 0.5°, 0.5°); the initial position errors (longitude, latitude, and altitude) were set to (12 m, 12 m, 12 m). The Doppler Velocity Log (DVL) had a velocity measurement error of 0.3 m/s and a scale factor error of 0.1. The SINS sampling period was 0.01 s, the DVL sampling period was 0.2 s, the filter update cycle was 1 s, and the sliding-window length for the recursive estimation was 20 samples. With (1°, 1°, 1°) as the first case, (0.7°, 0.7°, 0.7°) as the second case, and (0.5°, 0.5°, 0.5°) as the third case, the other variables did not change.
The simulation time was selected as 5000 s to verify the performance of the algorithm. The time periods during which the process noise variance changed were as follows: , from 2000 s to 2500 s, and , from 3500 s to 4000 s. To better verify the filtering performance of the proposed algorithm when system noise statistics are unknown, it was assumed that during the covariance matrix of the process noise suddenly increased to four times the true value; during , the covariance matrix of the measurement noise suddenly increased to five times the true value.
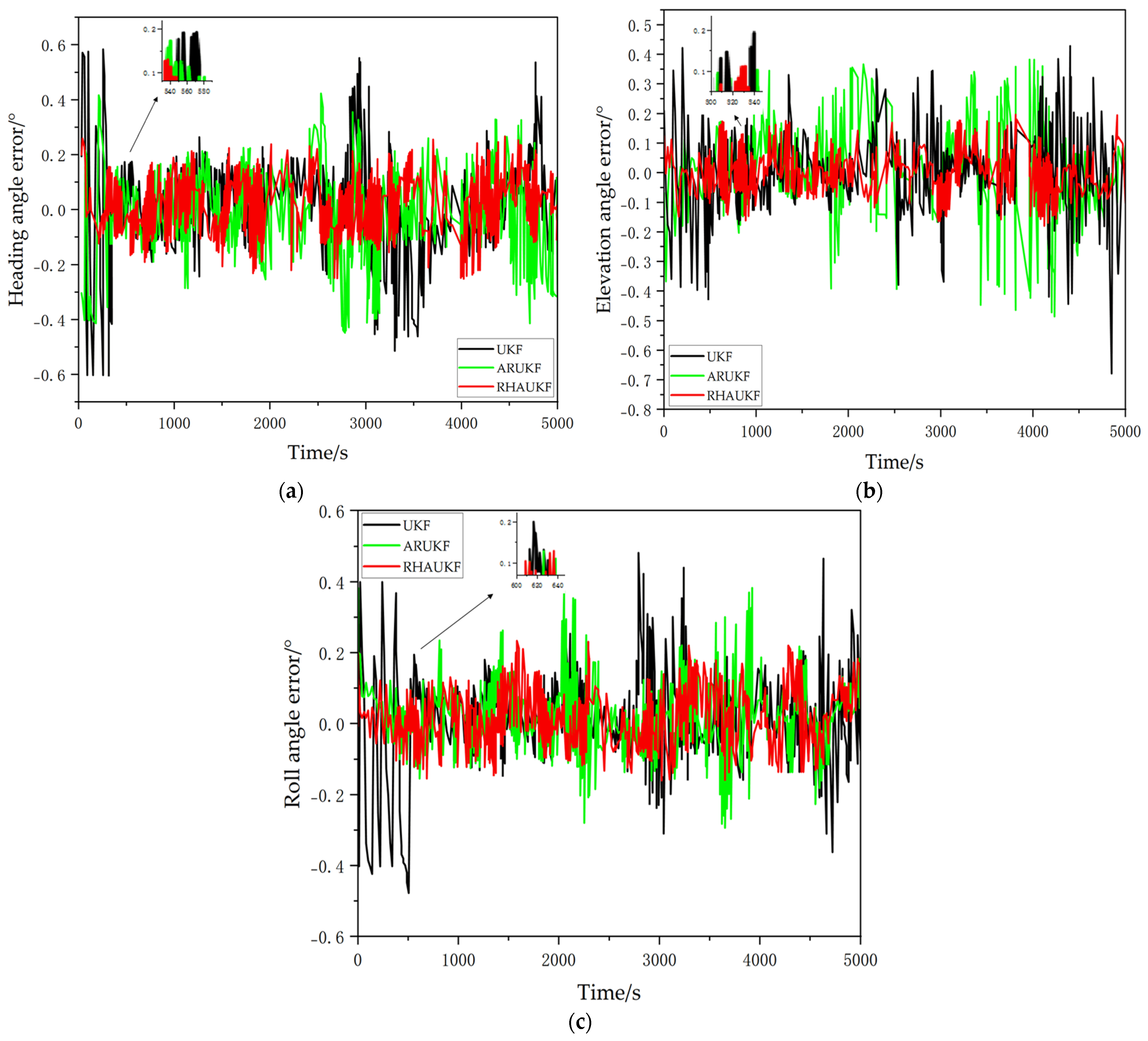
The simulation results are shown in
Figure 4.
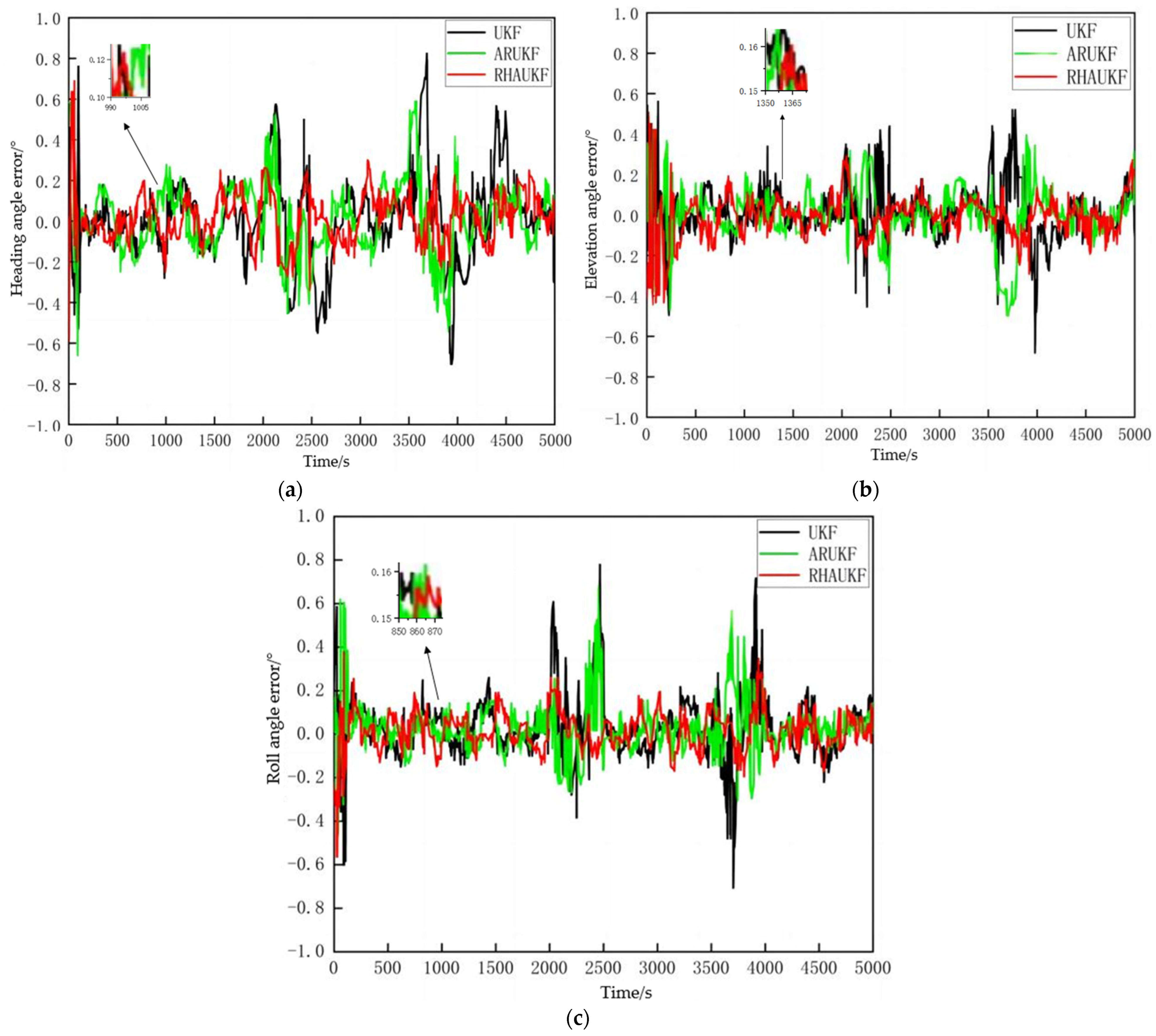
The heading, pitch, and roll error curves obtained using the three different filtering algorithms are shown in
Figure 4. When accurate noise statistics are available, the traditional UKF, the ARUKF, and the proposed RHAUKF exhibit comparable accuracy in estimating heading, pitch, and roll, with errors generally within the ranges of [−0.25°, 0.28°], [−0.20°, 0.20°], and [−0.18°, 0.20°], respectively, demonstrating their effectiveness in typical underwater navigation scenarios.
During periods and , the increased measurement noise covariance resulted in degraded heading, pitch, and roll estimation accuracy for the standard UKF. Specifically, the UKF exhibited heading, pitch, and roll errors within the ranges of [−0.55°, 0.58°], [−0.48°, 0.45°], and [−0.40°, 0.60°] during and within the ranges of [−0.68°, 0.80°], [−0.70°, 0.55°], and [−0.73°, 0.71°] during . While the ARUKF showed improved accuracy compared to the UKF, its errors remained relatively large under the increased noise conditions, specifically within the ranges of [−0.48°, 0.50°], [−0.38°, 0.33°], and [−0.30°, 0.50°] during and within the ranges of [−0.58°, 0.60°], [−0.51°, 0.43°], and [−0.32°, 0.58°] during . In contrast, the proposed RHAUKF algorithm maintained significantly higher accuracy, with errors remaining within the ranges of [−0.26°, 0.28°], [−0.22°, 0.30°], and [−0.18°, 0.28°] during and within the ranges of [−0.23°, 0.28°], [−0.25°, 0.23°], and [−0.25°, 0.30°] during , demonstrating a substantial improvement in filtering accuracy and robustness against uncertain process noise, which is a critical advantage for reliable underwater navigation.
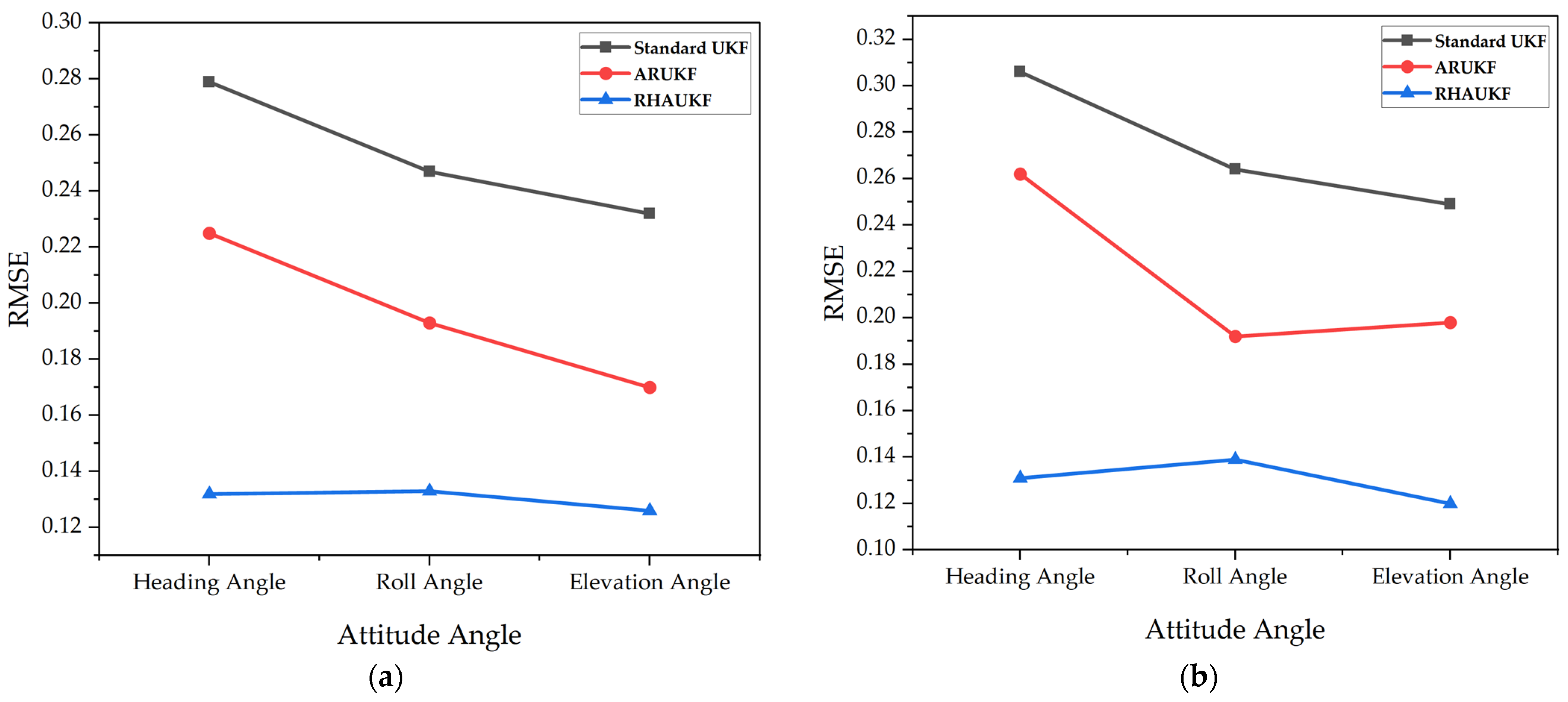
Figure 5 shows the root mean square error of the attitude angle parameters obtained by the three algorithms in one case under
and
.
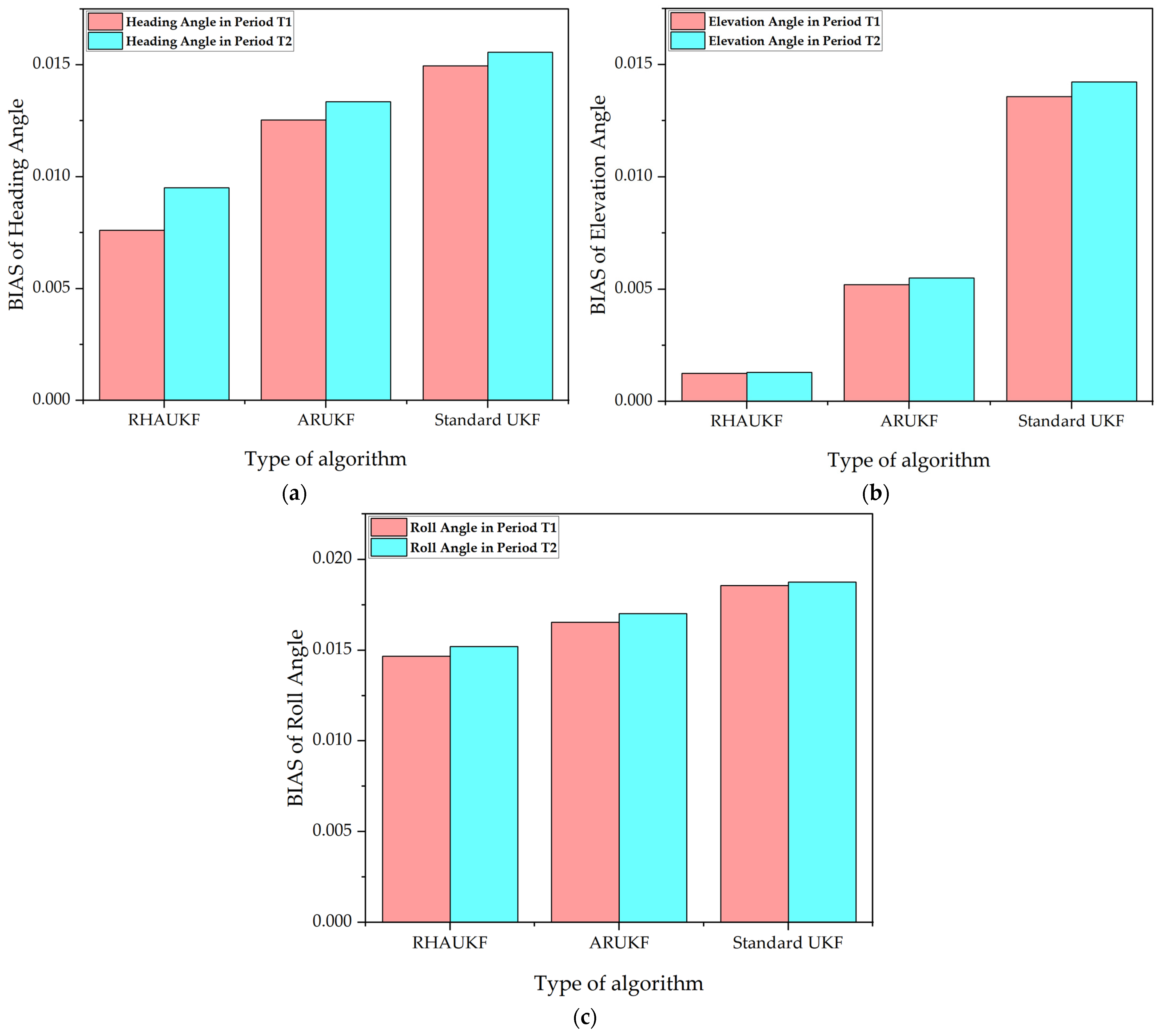
Figure 6 shows deviation diagrams of the attitude angle parameters obtained.
From
Figure 5, the root mean square error of the attitude angle of the RHAUKF was the smallest during the two time periods,
and
, and it was significantly smaller than that of the classical UKF and the ARUKF.
Figure 6 indicates that the deviation of the RHAUKF was the smallest during the two time periods,
and
, and it was significantly smaller than those of the classical UKF and the ARUKF.
Figure 7 reveals the error curves for the heading angle, pitch angle, and roll angle calculated by the three different filtering algorithms in the second case. When accurate noise statistical characteristics were obtained, the traditional UKF algorithm, the ARUKF algorithm, and the proposed RHAUKF algorithm achieved similar estimation accuracies for the heading angle, pitch angle, and roll angle, and the errors were approximately within the ranges of [−0.21°, 0.26°], [−0.19°, 0.18°], and [−0.15°, 0.17°], respectively.
At and , due to the covariance matrices of the measurement noise becoming larger, the estimation accuracy of the UKF for heading angle, pitch angle, and roll angle was reduced. The heading angle, pitch angle, and roll angle errors obtained by the UKF in the two time periods were [−0.49°, 0.54°], [−0.44°, 0.39°], and [−0.35°, 0.52°] and [−0.61°, 0.74°], [−0.67°, 0.51°], and [−0.68°, 0.66°], respectively. The heading angle, pitch angle, and roll angle errors obtained by the ARUKF in these two time periods were [−0.42°, 0.47°], [−0.34°, 0.28°], and [−0.26°, 0.43°] and [−0.54°, 0.52°], [−0.45°, 0.35°], and [−0.27°, 0.52°], respectively. Although the accuracy was improved compared with the UKF, the error under this algorithm was still large. The errors of the proposed RHAUKF algorithm in these two time periods were [−0.23°, 0.22°], [−0.18°, 0.23°], and [−0.15°, 0.23°] and [−0.17°, 0.24°], [−0.23°, 0.18°], and [−0.19°, 0.23°], respectively. Compared with the UKF and the ARUKF, the accuracies for heading angle, pitch angle, and roll angle were the highest, and the filtering accuracy was greatly improved, which effectively suppressed the interference of uncertain process noise.
As shown in
Figure 7, when the statistical characteristics of the noise were accurately known, the estimation accuracies of the three methods for the three-way velocity were equivalent, and the obtained east, north, and sky velocity errors were about [−0.11 m/s, 0.13 m/s], [−0.12 m/s, 0.10 m/s], and [−0.15 m/s, 0.17 m/s].
In the time period when the noise variance changed in the two processes of and , the east, north, and sky velocity errors obtained by the UKF were about [−0.25 m/s, 0.28 m/s], [−0.29 m/s, 0.31 m/s], and [−0.28 m/s, 0.33 m/s] and [−0.35 m/s, 0.35 m/s], [−0.36 m/s, 0.38 m/s], and [−0.37 m/s, 0.38 m/s], respectively. The three-way velocity errors obtained by the ARUKF in these two periods were [−0.23 m/s, 0.18 m/s ], [−0.19 m/s, 0.19 m/s], and [−0.26 m/s, 0.22 m/s] and [−0.18 m/s, 0.26 m/s], [−0.20 m/s, 0.19 m/s], and [−0.25 m/s, 0.30 m/s], respectively. The accuracy of the improved algorithm is limited. The proposed RHAUKF algorithm performs best in terms of three-way velocity error accuracy. In the two time periods, the velocity errors in the east, north, and sky directions were the most accurate when the noise statistical characteristics were known, and the filtering accuracy was significantly better than that of the UKF and the ARUKF algorithms.
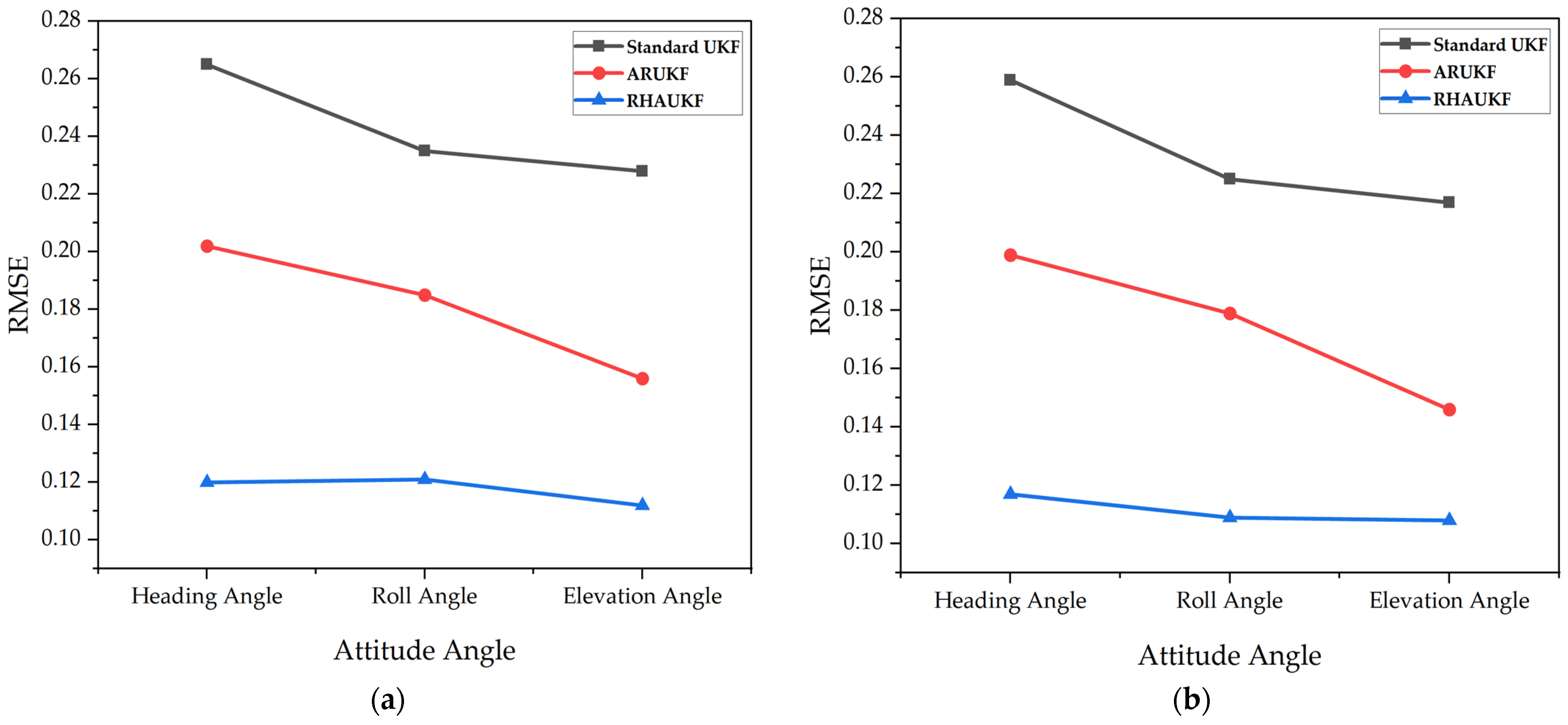
Figure 8 shows the root mean square errors of the attitude angle parameters obtained by the three algorithms in the second case, and
Figure 9 shows deviation diagrams of the attitude angle parameters.
Figure 10 depicts the error curves for the heading angles, pitch angles, and roll angles calculated by the three different filtering algorithms in the third case. When accurate noise statistics were available, the traditional UKF, the ARUKF, and the proposed RHAUKF exhibited comparable accuracies in estimating heading, pitch, and roll, with errors generally falling within the ranges of [−0.18°, 0.23°], [−0.14°, 0.16°], and [−0.11°, 0.15°], respectively, thereby demonstrating their effectiveness in typical underwater navigation scenarios.
During the periods and , the increased measurement noise covariance resulted in degraded heading, pitch, and roll estimation accuracy for the standard UKF. Specifically, the UKF exhibited heading, pitch, and roll errors within the ranges of [−0.44°, 0.49°], [−0.38°, 0.32°], and [−0.28°, 0.48°] during and within the ranges of [−0.56°, 0.68°], [−0.62°, 0.45°], and [−0.62°, 0.61°] during . While the ARUKF exhibited improved accuracy compared to the UKF, its errors remained relatively large under the increased noise conditions, specifically within the ranges of [−0.38°, 0.42°], [−0.28°, 0.22°], and [−0.21°, 0.38°] during and within the ranges of [−0.48°, 0.46°], [−0.38°, 0.28°], and [−0.21°, 0.46°] during . In contrast, the proposed RHAUKF algorithm maintained significantly higher accuracy, with errors remaining within the ranges of [−0.18°, 0.19°], [−0.12°, 0.19°], and [−0.12°, 0.18°] during and within the ranges of [−0.13°, 0.19°], [−0.18°, 0.13°], and [−0.13°, 0.16°] during , indicating a substantial improvement in filtering accuracy and robustness against uncertain process noise, a critical advantage for reliable underwater navigation.
Figure 11 shows the root mean square errors of the attitude angle parameters obtained by the three algorithms in one case, and
Figure 12 shows deviation diagrams of the attitude angle parameters.
The above experimental results display that the root mean square errors and deviations of the attitude angles of the RHAUKF were the smallest in the two time periods T1 and T2 and were significantly smaller than those of the classical UKF and the ARUKF. Compared with the UKF algorithm, the heading angle, pitch angle, and roll angle accuracies under the ARUKF algorithm increased by 19%, 14%, and 23% and by 14%, 20%, and 27%, respectively. The heading angle, pitch angle, and roll angle accuracies under the RHAUKF algorithm improved by 53%, 54%, and 53% and by 43%, 49%, and 53%, respectively. The RHAUKF is better than the ARUKF.
As shown in
Figure 13, when accurate noise statistics are known, the three algorithms exhibit comparable accuracy in estimating the three-dimensional velocity. The resulting errors in east, north, and down velocities were approximately within the ranges of [−0.11 m/s, 0.13 m/s], [−0.12 m/s, 0.10 m/s], and [−0.15 m/s, 0.17 m/s], respectively, demonstrating their effectiveness under ideal conditions typical for underwater vehicle navigation performance analysis.
During periods and , where process noise variance changed, the UKF exhibited east, north, and down velocity errors approximately within the ranges of [−0.25 m/s, 0.28 m/s], [−0.29 m/s, 0.31 m/s], and [−0.28 m/s, 0.33 m/s] during and within the ranges of [−0.35 m/s, 0.35 m/s], [−0.36 m/s, 0.38 m/s], and [−0.37 m/s, 0.38 m/s] during . The ARUKF, under the same conditions, yielded velocity errors within the ranges of [−0.23 m/s, 0.18 m/s], [−0.19 m/s, 0.19 m/s], and [−0.26 m/s, 0.22 m/s] during and within the ranges of [−0.18 m/s, 0.26 m/s], [−0.20 m/s, 0.19 m/s], and [−0.25 m/s, 0.30 m/s] during . These results highlight the impact of varying process noise on velocity estimation accuracy for both algorithms, underscoring the importance of robust filtering techniques in challenging underwater navigation environments.
For the two time periods,
and
, the root mean square errors and deviations of the three-way velocities of the three algorithms are exposed in
Figure 14 and
Figure 15, respectively.
Although the results show some improvements with the ARUKF algorithm, the accuracy of velocity estimation in the period was limited, and the error was kept in a relatively wide range. In contrast, the proposed RHAUKF algorithm exhibited superior performance in terms of three-dimensional velocity error. During both and , the RHAUKF achieved velocity errors (east, north, and down) comparable to the best results obtained under known noise statistics, significantly outperforming both the UKF and the ARUKF algorithms, thus showcasing its robustness and effectiveness for underwater navigation applications, where accurate velocity estimation is crucial.
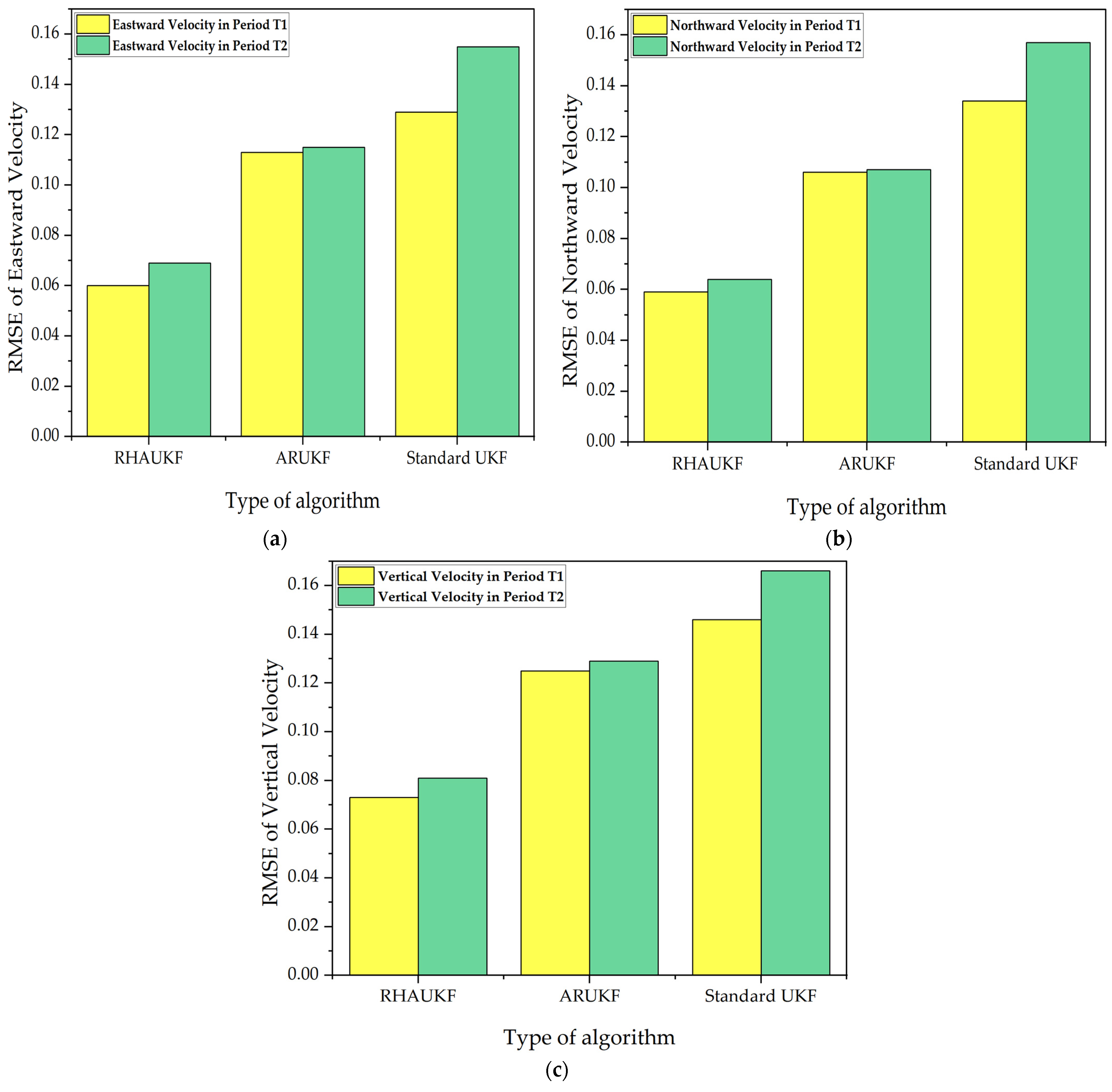
The RHAUKF algorithm consistently achieved the lowest three-dimensional velocity RMSEs during both
and
, significantly outperforming both the standard UKF and the ARUKF algorithms, as shown in
Figure 14 and
Figure 15. Compared to the standard UKF, the ARUKF exhibited improvements in east, north, and down velocity accuracy of 12%, 21%, and 14% during
and 26%, 31%, and 22% during
. The proposed RHAUKF algorithm achieved substantially greater accuracy improvements of 53%, 55%, and 50% during
and 55%, 59%, and 51% during
, surpassing even the ARUKF and highlighting its superior robustness for underwater navigation applications subject to dynamic noise conditions.
Figure 16 shows the three position error curves calculated by UKF, ARUKF and the proposed RHAUKF. When precise noise statistics were known, the traditional UKF, the ARUKF, and the proposed RHAUKF demonstrated comparable accuracy in estimating position, with resulting east, north, and down position errors approximately within the ranges of [−4.0 m, 4.5 m], [−3.5 m, 4.0 m], and [−5.5 m, 6.2 m], respectively. These results highlight the algorithms’ performance under ideal conditions, forming a benchmark for evaluating their robustness under more challenging scenarios typical of underwater navigation.
During the two time intervals of and , characterized by variations in process noise variance, the UKF yielded east, north, and down position errors approximately within the ranges of [−10.5 m, 12.5 m], [−10.8 m, 11.8 m], and [−11.7 m, 12.2 m] for T1 and within the ranges of [−12.5 m, 13 m], [−13.5 m, 13 m], and [−11.5 m, 12.2 m] for T2. The ARUKF revealed slightly improved accuracy compared to the UKF, with errors within the ranges of [−7.5 m, 10.5 m], [−7.0 m, 7.0 m], and [−9.8 m, 11.0 m] during and within the ranges of [−7.0 m, 9.5 m], [−12.0 m, 11.0 m], and [−12.0 m, 10.5 m] during . However, the proposed RHAUKF algorithm demonstrated the highest position estimation accuracy, achieving errors comparable to those obtained under known noise statistics during both periods. This represents a significant improvement in filtering accuracy compared to both the UKF and the ARUKF, highlighting its robustness for underwater navigation in the presence of dynamic noise.
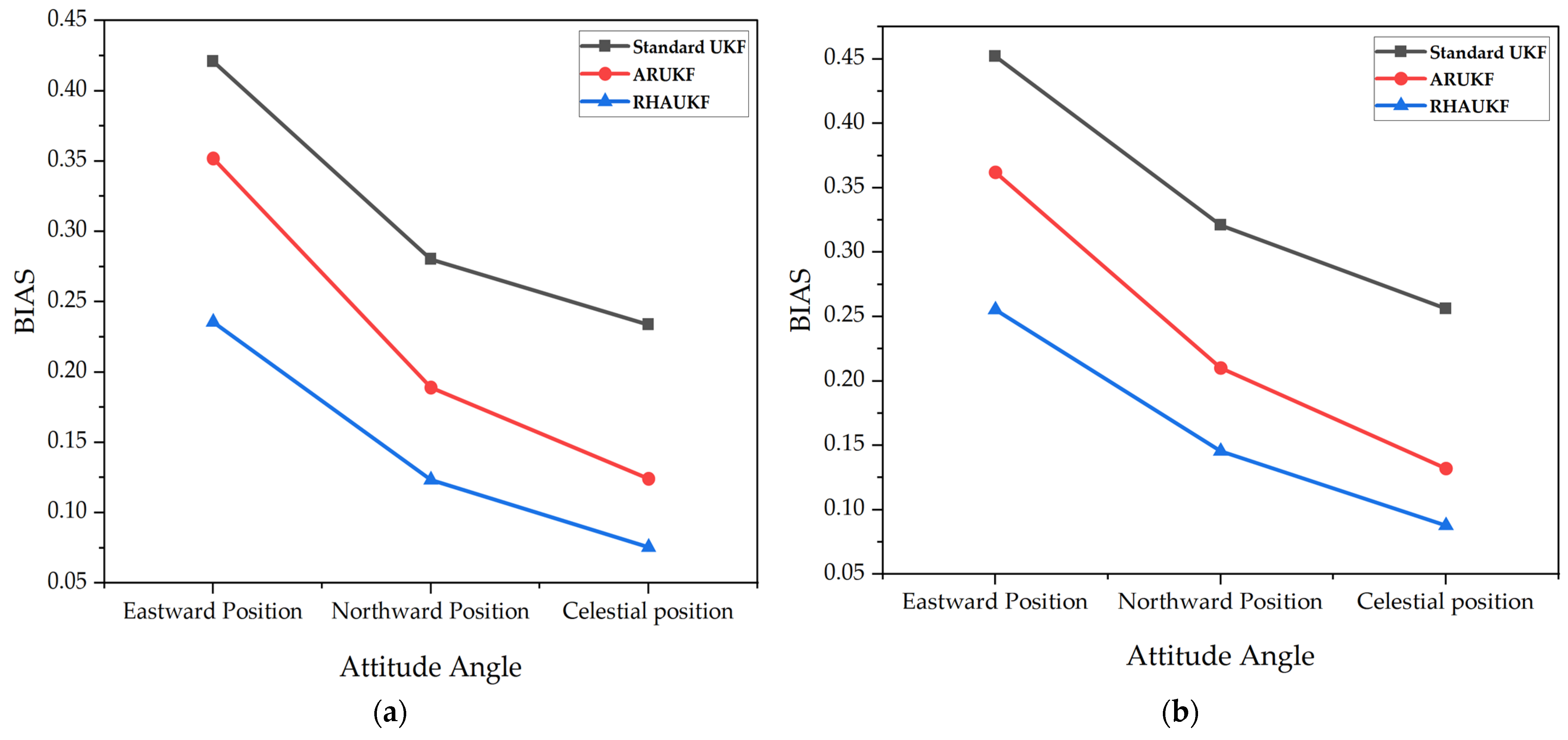
The root mean square errors and deviations of the three-way positions of the three algorithms in the two time periods,
and
, are shown in
Figure 17 and
Figure 18, below.
Figure 17 and
Figure 18 show that the RHAUKF algorithm consistently achieved the lowest three-dimensional position RMSEs during both periods,
and
, significantly outperforming both the standard UKF and the ARUKF. Specifically, during
, the ARUKF improved east, north, and down position accuracies by 25%, 25%, and 28%, respectively, compared to the UKF; and during
, these improvements were 28%, 16%, and 12%. The RHAUKF algorithm yielded even more substantial improvements, with accuracy gains of 62%, 65%, and 54% in
and 62%, 68%, and 50% in
, clearly surpassing the ARUKF and demonstrating its superior performance for robust underwater navigation.
The simulation results demonstrate that, under ideal conditions with precisely known system noise, the designed SINS/DVL integrated navigation system achieves high navigation accuracy, enabling precise positioning. In such cases, the traditional UKF, the ARUKF, and the proposed RHAUKF perform comparably. However, when prior noise statistics are unknown or inaccurate—a more realistic scenario for underwater navigation—the proposed adaptive UKF algorithm achieves significantly enhanced filtering performance compared to the UKF and the ARUKF. This adaptive algorithm effectively suppresses noise interference, resulting in system errors that closely approximate those achieved with precisely known noise characteristics, highlighting its robustness for real-world underwater applications.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}