1. Introduction
The rapid advancements in beyond 5G and 6G technologies have dramatically improved key aspects of wireless communication, such as bandwidth, latency, and connection density, thereby creating new opportunities for the development of wireless sensor networks (WSNs) [
1,
2,
3]. However, these advancements also introduce new challenges, particularly in the efficient management of resources due to limited power, bandwidth constraints, and the complex interactions between critical system components, such as sensor grouping, power allocation, and state estimation. non-orthogonal multiple access (NOMA), a promising approach for resource sharing, leverages power-domain differentiation to improve system performance, particularly in the uplink. At the same time, remote state estimation, often optimized using the Kalman filter (KF), is crucial for accurately estimating a system’s state, especially under noisy conditions in wireless networks. Despite the potential of both technologies, integrating NOMA with KF-based remote state estimation presents unique challenges, including interference management, power control, transmission delay, and outage risks. This paper proposes a joint optimization framework that combines NOMA’s resource allocation capabilities with KF for remote state estimation, addressing these challenges simultaneously. By optimizing sensor grouping, power allocation, and transmission strategies, this approach minimizes outage risks while enhancing both the accuracy of remote state estimation and transmission efficiency, ensuring better system performance and sustainability in beyond 5G and 6G technologies.
During the transmission of sensor local states to the base station, limitations in bandwidth, power, and other resources, as well as factors such as delay, packet loss, and channel interference, make it a critical issue to consider how to assign sensors to channels and set appropriate power levels for each sensor to minimize the total outage risk across all sensors. To address this, we propose combining game theory with sensor grouping and power allocation strategies in NOMA as an effective approach [
4,
5,
6]. For instance, Liu et al. propose a greedy subchannel matching algorithm based on hypergame theory for sensor and subchannel pairing in downlink NOMA networks, highlighting the importance of sensor grouping in WSN [
7]. Additionally, a game theory-driven data security transmission method is proposed to mitigate potential interference in drone-assisted vehicular networks, with the significant impact of mutual interference on communication quality being demonstrated [
8]. Wang et al. explore the application of game theory in cooperative communication scenarios, proposing a two-stage game model based on power and spectrum trading, optimizing transmission rates by solving the game equilibrium, and emphasizing the key role of power in communication processes [
9,
10].
While some models in sensor wireless transmission are convex functions, many others are non-convex, which makes traditional game theory methods ineffective in solving such problems. As a result, researchers have proposed solutions to convert non-convex problems into convex optimization problems [
11,
12,
13]. For example, in reference [
14], a joint optimization algorithm that combines the Dinkelbach algorithm with a successive convex approximation (SCA) method successfully converts fractional optimization problems into equivalent linear problems, thus converting non-convex problems into convex ones. This method proves the existence of an optimal solution for the joint optimization of power and subcarrier allocation. The complex constrained optimization problems are simplified using Lagrangian dual decomposition in [
15,
16], where power allocation in uplink NOMA systems is optimized, leading to a significant reduction in computational complexity. Transmission delay is another critical factor. Transmission delay, energy consumption, and sensor grouping are jointly optimized in [
17,
18], where their impacts on data transmission are studied, emphasizing the indispensable role of transmission delay in the optimization process.
Although existing research provides valuable insights into addressing some problems in sensor wireless transmission, several challenges remain unsolved. First, effectively integrating transmission delay, energy consumption, channel interference, and outage risk due to remote state estimation in beyond 5G and 6G environments remains a complex problem. Second, while some methods have addressed parts of non-convex optimization problems, further research is needed to reduce system complexity while maintaining computational efficiency. Additionally, current game theory models primarily focus on single-objective optimization; thus, balancing multiple objectives in a multi-objective optimization framework requires further exploration.
Minimizing outage risks for sensors during transmission is critical for ensuring the stability and reliability of uplink NOMA systems [
19,
20,
21,
22]. Yadav et al. introduce the optimization of intelligent reflecting surface reflection coefficients, which effectively reduces the impact of channel fading and lowers outage probability [
23]. However, it does not fully address the effects of power allocation and non-ideal intelligent reflecting surfaces on the system. Power allocation and sensor grouping are optimized to reduce outage risks and increase system capacity, though the study lacks a detailed discussion of interference management and dynamic resource scheduling strategies. In [
24], outage probability in downlink NOMA systems is minimized through energy harvesting and cooperative communication optimization; however, the paper does not explore how to further improve performance via enhanced CSI estimation and optimized power allocation. The optimization of power allocation is used to enhance system rate and reduce outage probability, though the specifics of sensor grouping and interference management are not delved into in the study [
25]. Overall, while these methods effectively reduce outage probability, they do not fully explore refined resource scheduling strategies. Future research could investigate the impact of these factors on system performance.
When addressing the minimization of outage risk during the remote state estimation process for sensors, we must not only consider sensor state estimation issues (e.g., the state estimation error covariance) but also focus on the communication challenges in beyond 5G and 6G wireless transmission. Unlike conventional studies that rely purely on quality-of-service (QoS) metrics or signal-to-interference-plus-noise ratio (SINR) for sensor grouping and power allocation, this work focuses explicitly on integrating remote state estimation, network communication processes, and outage probabilities during transmission. Specifically, the complexity arises from the necessity to balance multiple performance criteria—remote state estimation accuracy, transmission latency, and outage probability—in a unified optimization framework, which underscores the importance of jointly utilizing uplink NOMA and KF techniques. The main contributions of this paper are summarized as follows
Problem Modeling: We propose a novel unified optimization framework, formulating the joint minimization of outage risk in remote state estimation and transmission delay as a mixed-integer nonlinear programming (MINLP) problem. This formulation explicitly incorporates both communication and estimation constraints, providing a theoretical foundation for subsequent algorithm designs.
Coalitional Game-Based Sensor Grouping: Motivated by the limitations of traditional heuristic approaches, we propose a coalitional game-based sensor grouping algorithm. In this framework, each sensor acts as a rational player seeking to maximize its individual utility, and sensors iteratively form cooperative groups based on local improvement rules. The game converges to a Nash-stable coalition structure, which ensures a locally optimal grouping strategy. This approach effectively mitigates inter-group interference in multi-sensor uplink scenarios while significantly enhancing grouping efficiency and resource utilization.
Power Allocation Optimization: To address the nonlinearity and fractional nature of the power allocation subproblem, we employ the Dinkelbach algorithm to transform the original fractional objective into a parameterized form. Then, we use successive convex approximation (SCA) to handle non-convex constraints and apply dual decomposition to solve the resulting convex subproblems. This layered solution framework guarantees convergence to a stationary point and achieves a suboptimal solution with provable performance. Simulation results confirm that this approach provides near-optimal performance with significantly reduced computational complexity.
By combining these strategies, our framework effectively mitigates outage risks during sensor transmissions and considerably enhances overall system reliability and estimation performance. Additionally, by transforming the original non-convex optimization into convex subproblems, the proposed solution methodology substantially reduces computational complexity. These contributions provide theoretical insights and practical guidelines for optimizing wireless transmission in uplink NOMA systems within future industrial wireless networks beyond 5G and 6G.
To further highlight the novelty of our approach, we provide a comparison in
Table 1 that contrasts the proposed framework with representative existing methods in terms of sensor grouping, power allocation, outage-awareness, and estimation integration.
The remainder of this paper is organized as follows:
Section 2 presents the mathematical formulation of the problem,
Section 3 investigates the coalition game-based sensor grouping problem and the joint optimization algorithm for solving the optimal power allocation, while numerical examples and conclusions are presented in
Section 4 and
Section 5, respectively.
Notations: denotes the set of real numbers. represents the set of complex numbers. The symbol denotes the transpose operation. The superscript indicates the matrix inverse. The symbol represents the vector or matrix transpose operator. The notation refers to probability. represents the trace operator of a matrix.
2. System Model
This paper investigates an uplink NOMA transmission model in a wireless sensor network with a single base station. As illustrated in
Figure 1, after performing local processing,
N sensors transmit their data to the base station, which subsequently conducts remote state estimation. Before transmission, each sensor independently evaluates and selects one of the
G channels for sensor grouping based on a comprehensive assessment of factors such as its distance to the base station, channel gain, maximum and minimum power constraints, and noise levels. Additionally, within each group, the decoding order and power allocation strategy are determined to optimize transmission performance and resource utilization efficiency. This process highlights the sensors’ adaptive capabilities in channel selection, grouping, and resource scheduling, which are critical components of the system design. The set of cellular sensors is denoted by
, with each sensor equipped with a single antenna. In an uplink NOMA system for beyond 5G and 6G networks, the same channel can be assigned to multiple sensors. It is assumed that all sensors in the base station share
channels, resulting in
NOMA clusters within the cell. The set of sensor indices in each cluster is defined as
, where
denotes the number of sensors assigned to the
g-th NOMA cluster. It should be noted that the set
may vary across different clusters depending on the grouping results.
2.1. Local State Estimate Model
To introduce the basic framework of the KF method, we describe how the measurement output of sensor
i in channel
g reflects the underlying process. The system’s state at the next time step evolves from the previous state at time
t according to the linear transition equation
where
,
, and
make up the state transition matrix. The state variable
and the process noise
are independent and follow complex Gaussian distributions. At the next time step, the observation is modeled by the linear measurement equation
where
and
make up the measurement matrix and
is the measurement noise, which also follows a complex Gaussian distribution [
26,
27]. The KF aims to use a sequence of observations to accurately estimate the state.
The prior and posterior state estimates,
and
, respectively, are updated using the Kalman gain
and the error covariances
and
. The KF equations are as follows [
26]:
where
is the identity matrix of size
.
The estimation error covariance, denoted
, quantifies the uncertainty of the state estimate and is defined as
As the local estimation error covariance converges exponentially to a steady-state value , the KF’s accuracy improves over time.
2.2. Uplink NOMA Communication Model
The impulse response of the channel between sensor i and the base station is represented by , where denotes the impulse response of the Rayleigh fading channel, with as the path loss exponent and as the distance between sensor i and the base station. This model captures both small-scale and large-scale effects, where the numerator models Rayleigh fading and the denominator models large-scale path loss. The square root form is used because path loss affects the signal power and, thus, the amplitude is scaled by the square root to ensure that the average received power decays as . This ensures consistency with standard wireless propagation models. The probability density function of is given by where is the variance of the normal distribution .
The received signal at the base station is given by
where
represents the transmit power allocated to sensor
i in channel
g and
denotes the transmitted message from sensor
i in channel
g. Additionally,
represents the Gaussian white noise in the process of signal transmission from the base station to sensor
i through channel
g.
The probability density function (PDF) of
[
19] is given by
At the receiver in a NOMA system, SIC detection is applied to separate the multi-sensor superimposed signals. The optimal decoding order follows an ascending sequence based on sensors’ channel gains, allowing for sequential detection and separation of each sensor’s signal. Finally, the achievable transmission rate for sensor
i in channel
g can be expressed according to Shannon’s theorem as follows: At the receiver in a NOMA system, SIC detection is applied to separate the multi-sensor superimposed signals. The optimal decoding order is determined by an ascending sequence of sensors’ channel gains, thereby facilitating sequential detection and the separation of each sensor’s signal. Finally, the achievable transmission rate for sensor
i in channel
g can be expressed according to Shannon’s theorem as follows:
where
B represents the bandwidth available to each sensor and
is defined as
.
The outage probability, as a critical metric for evaluating wireless system performance, represents the probability that the instantaneous link rate falls below the required sensor rate. We define
as the event in which the base station can successfully decode the signals from sensors 1 to
in channel
g but fails to correctly decode the signal from sensor
i in the same channel. When the sensor’s rate requirement is
, the minimum transmission rate is
and
; the outage probability of the event
can be expressed as follows: [
21]
where
. Correspondingly, this also represents its non-outage probability, which we define as
. Based on the above derivation, the outage probability for sensor
i in channel
g is formulated as follows:
where
2.3. Remote State Estimation Model
At each remote time
k, all sensors must send their local estimates to the remote estimator over a shared wireless channel. We denote the transmission of
by a binary random process
:
To explicitly reflect how packet dropouts influence the remote estimation process, we derive the expression of
based on the binary transmission indicator
defined in (14). Specifically, when
, the remote estimator directly adopts the received local estimate and sets the estimation error covariance to the local value
. Conversely, when
, the transmission fails, and the remote estimator performs a time prediction using the Kalman filter, resulting in the following recursive update:
Combining Equation (
14) with Equation (
13) from the previous section, we can draw the following conclusion:
2.4. Transmission Delay Model
2.4.1. Local Transmission Time
When sensor i in channel g performs its task locally, the task execution delay can be described by where denotes the computational capability of the sensor.
2.4.2. Base Station Offload and Processing Time
If the sensor offloads its task to the base station, the total delay consists of the transmission delay over the wireless link and the execution delay at the base station, expressed as where and denote the transmission delay and the execution delay, respectively. The transmission delay is formulated as and the execution delay at the base station is where denotes the computational capability of the base station. The total time expenditure for the sensor is
2.5. Problem Formulation
In this section, we formulate an optimization problem to minimize the remote outage risk, which incorporates the total time expenditure and the associated error covariance of remote state estimation in KF. The objective is to jointly optimize sensor grouping and power allocation for the sensors. This objective balances transmission delay and estimation accuracy. To capture this trade-off, we introduce a weighted cost that accounts for both communication efficiency and estimation quality. Specifically, we define the system’s objective value using the following equation:
where
and
(with
) make up a weight factor used to combine the objectives into a single function and
is a scaling factor to align the objectives to the same magnitude. The description of Problem 1 is as follows:
Constraint (
18b) specifies that the transmission power of sensor
i in channel
g must be less than the maximum transmission power limits. Constraint (18c) ensures that the overall transmission time experienced by sensor
i over channel
g does not exceed the prescribed maximum threshold. Constraints (
18d) and (
18e) indicate that each sensor can be assigned to only one channel.
4. Performance Evalution
In this section, we evaluate the performance of the resource allocation algorithm for minimizing outage risk under the joint optimization of remote state estimation and transmission delay. The experiments were conducted using MATLAB 2024b. The simulation setup positioned the base station at coordinates
, with sensors randomly distributed within a
area. This area size was chosen to represent a typical industrial Internet of Things (IIoT) scenario, where a large number of sensors operate in a compact space with short-range wireless communication and strict latency and reliability requirements. We simulated 1000 Rayleigh fading channel realizations and used the sampled values to calculate channel gains. Each sensor was assigned a bandwidth of
for data transmission. To reflect a dynamic and time-varying wireless environment, we further assumed that sensor positions were updated at each time slot, simulating node mobility or deployment variations commonly encountered in practical wireless sensor networks. Specific parameters are summarized in
Table 3. The system parameters
,
,
, and
were sampled from the range
to reflect moderate system dynamics and noise levels while ensuring numerical stability for Kalman filtering. The optimization-related parameters were set as
,
, and
, representing a balanced trade-off between communication delay and estimation accuracy, as well as a standard Rayleigh fading environment. These parameter settings were consistent with prior works and supported the generality and reliability of the simulation.
For the sensor grouping algorithm, we evaluated two alternative strategies and compared them with the proposed heuristic algorithm, which optimized sensor grouping under fixed power constraints to minimize the state estimation outage risk. The two strategies were random sensor grouping [
28] and a suboptimal grouping approach [
29]. The suboptimal strategy operated as follows: given
N sensors, they were first sorted in descending order based on their channel gains. The sorted sensors were then evenly divided into
M blocks. Sensors from the same position in each block formed a group (e.g., the first sensor in each block formed the first group, the second sensor formed the second group, etc.) until all groups were created. For the power allocation algorithm, we compared two approaches: random power allocation within the allowable range [
30] and assigning the maximum power value to all sensors [
15]. Comparing the algorithm with the four aforementioned algorithms helped evaluate the performance, computational complexity, and practical feasibility of different strategies in the uplink NOMA system, thereby optimizing resource allocation.
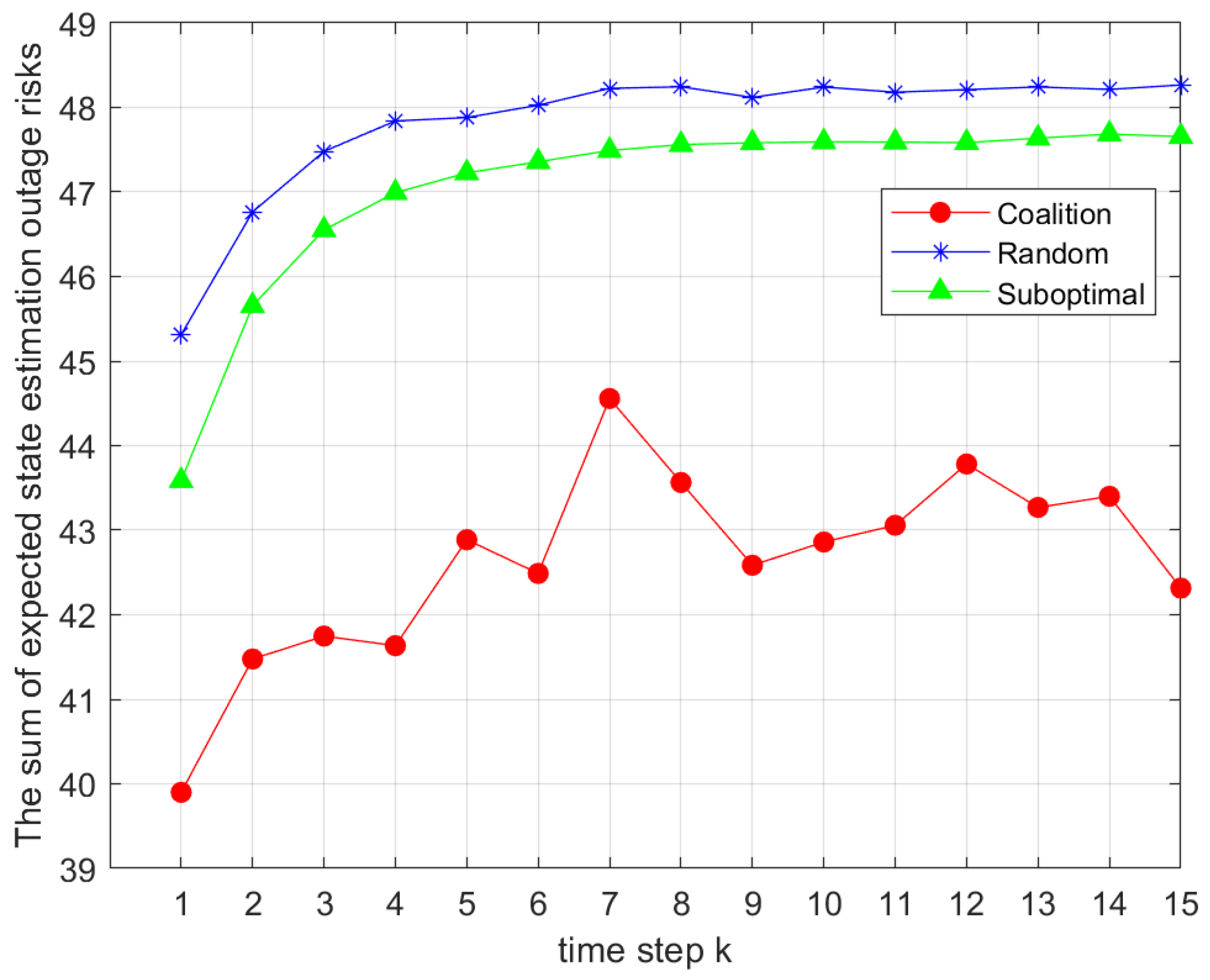
Figure 2 presents the sum of the expected function in Problem 4 with nine sensors and three channels. The simulation parameters were set as
,
,
, and
. We compared different sensor grouping strategies, including the proposed coalition game-based intelligent grouping algorithm, the random grouping algorithm, and the suboptimal grouping algorithm. As shown, across all time slots
k, the coalition game-based algorithm consistently outperformed the other two in solving the sum of expectations in Problem 1. Each point was obtained from 500 Monte Carlo simulations per algorithm per time slot.
Figure 3 compares different power allocation methods under the same coalition game-based grouping strategy. Simulation settings and Monte Carlo parameters were consistent with those in
Figure 2. The joint Dinkelbach algorithm, the SCA algorithm, and the KKT-based power allocation were evaluated against random and full power allocation. The proposed joint allocation methods clearly outperformed the baselines in solving the sum of expectations in Problem 1.
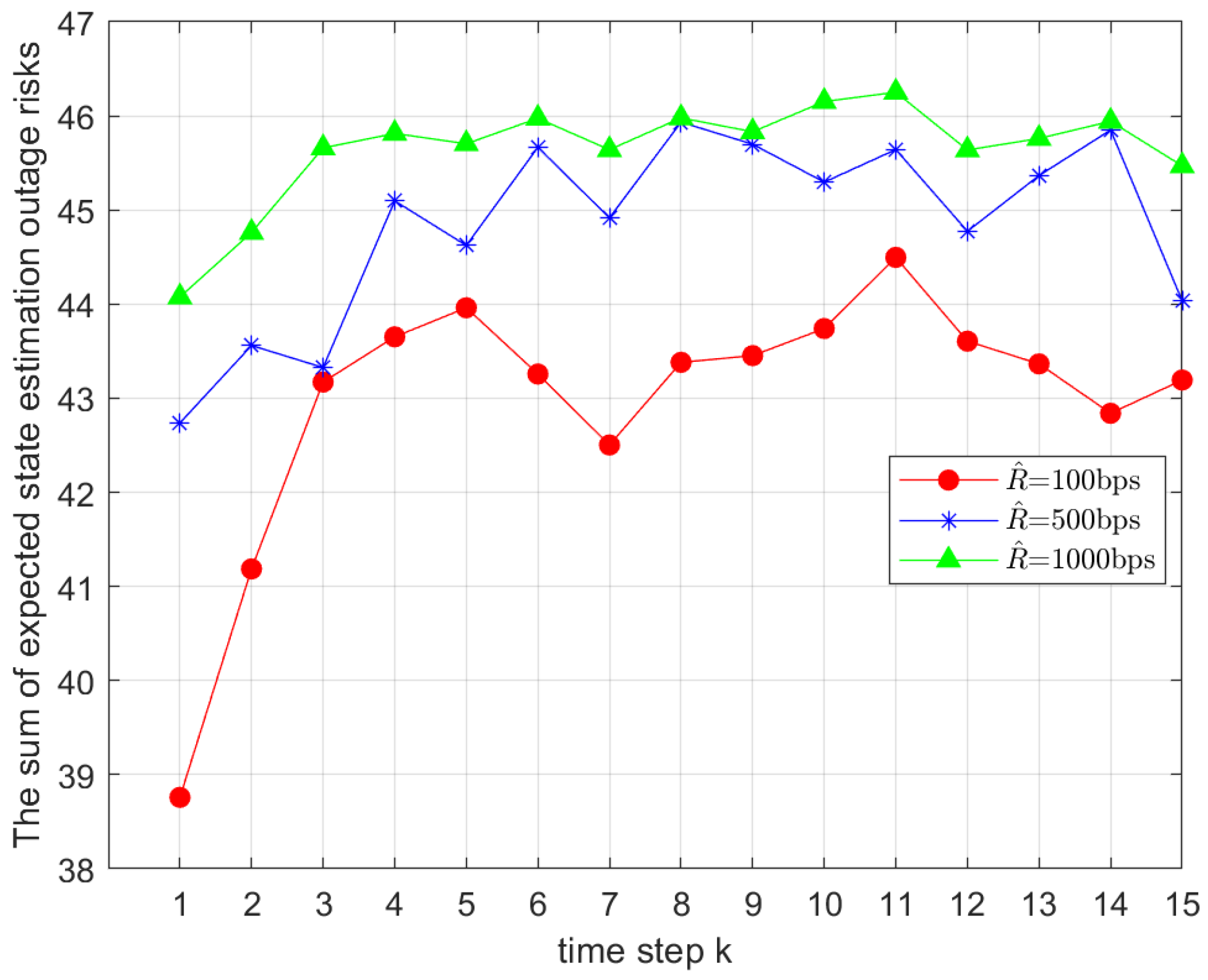
Figure 4 illustrates the impact of different minimum transmission rates on the total value of the objective function in Problem 1. The minimum rates were set to
,
, and
, while other parameters remained unchanged. It was observed that the total objective value increased significantly with
, which aligned with the theoretical expectations based on Equation (
20).
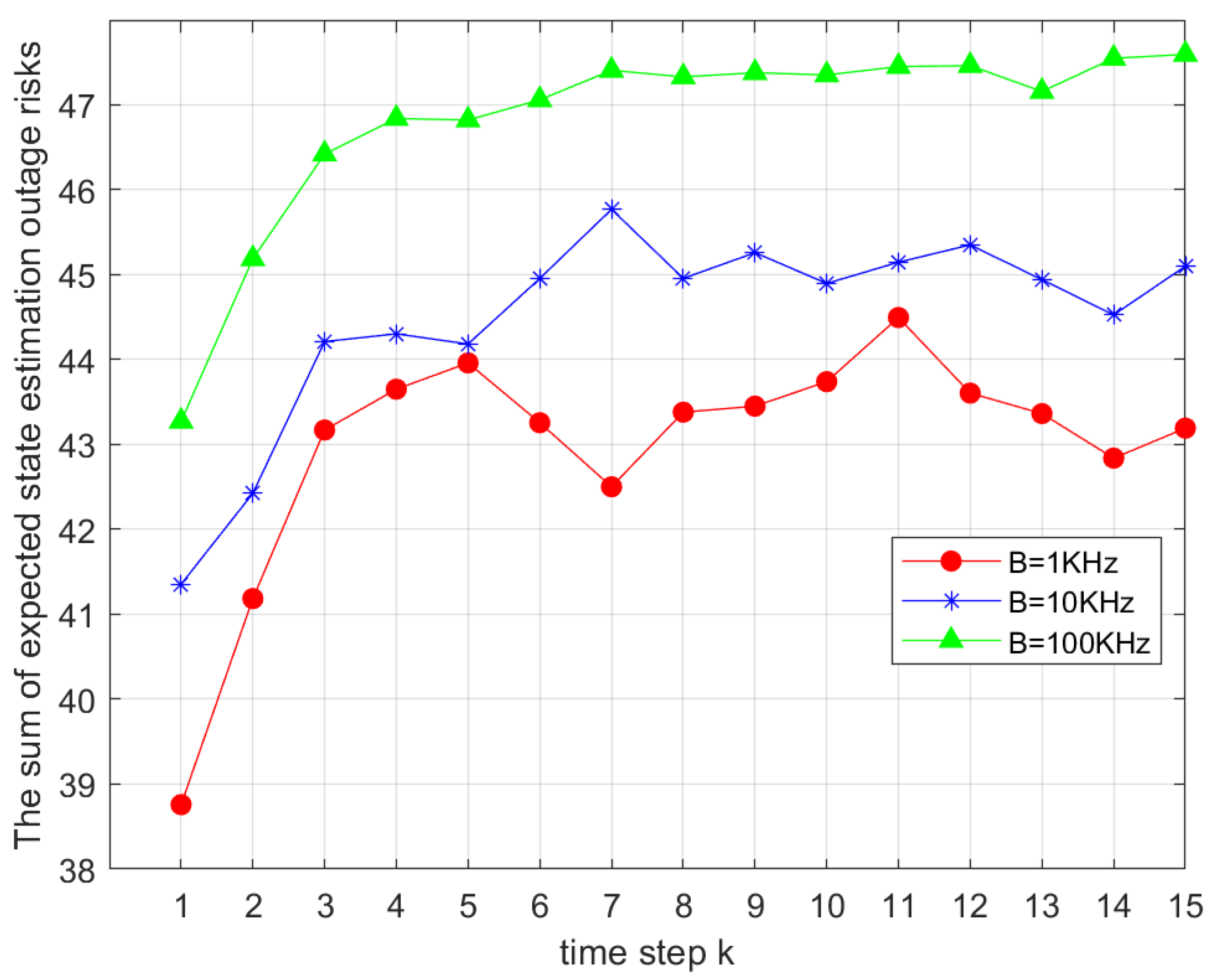
Figure 5 examines the effect of bandwidth
B on
. Bandwidth values were set to
,
, and
. The curves show that as
B increased,
grew accordingly. Limited bandwidth constrained communication performance, while a larger
B improved transmission rates and system efficiency, validating the model’s sensitivity to bandwidth variations.
In
Figure 6, we show the impact of the weighting parameter
on the total value
of the objective function in Problem 1. Specifically, we varied the parameter
with values
,
, and
. The results indicate a clear trend: as the proportion allocated to
increased, the total value
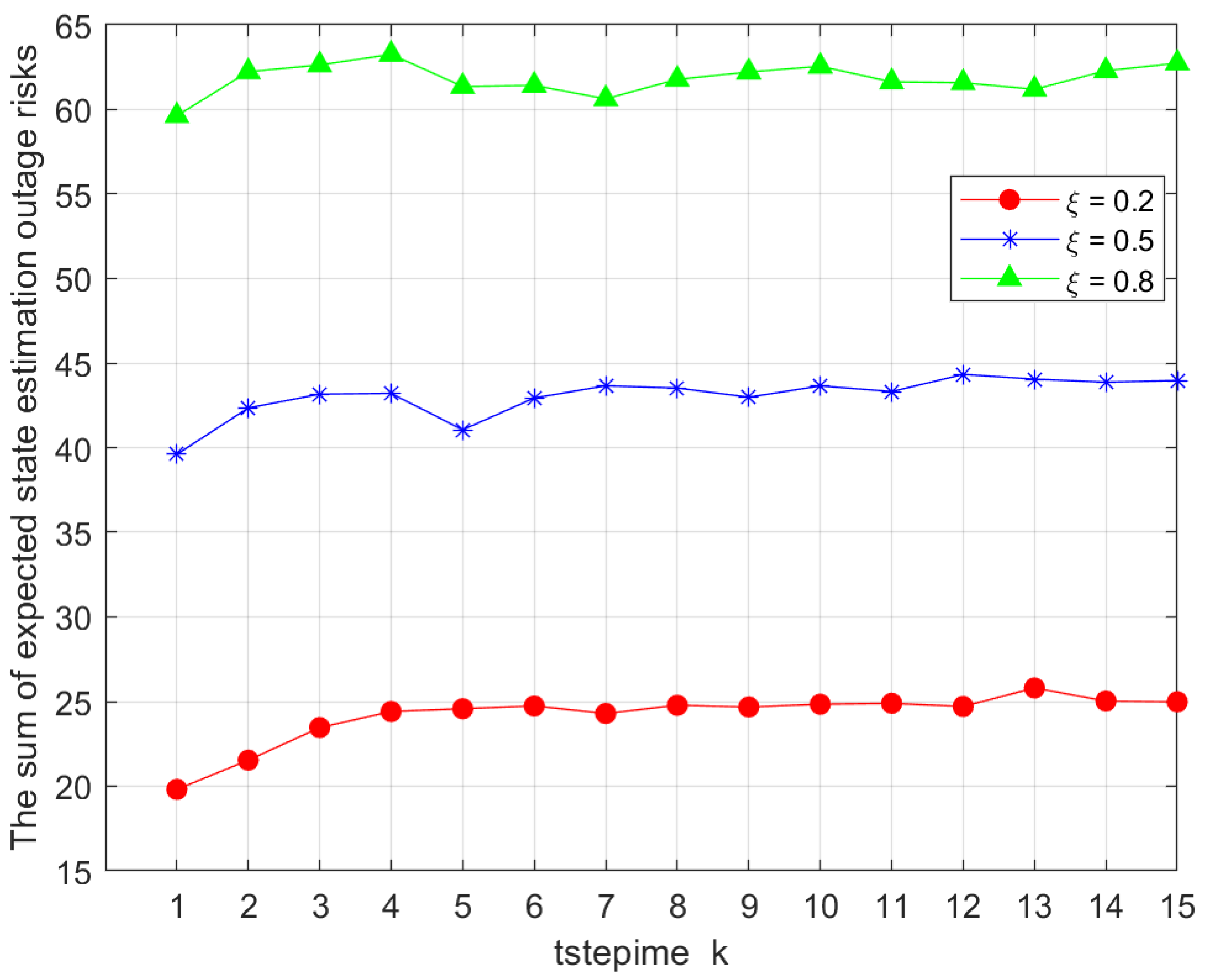
also rose. This suggests that in the joint optimization of remote state estimation using KF and the offloading time consumption, the latter has a more pronounced influence on the objective function. Given that our optimization problem aimed to minimize the objective function, this result highlights a critical trade-off. To achieve optimal system performance, it is advisable to assign a relatively smaller weight to offloading time consumption while allocating a greater proportion to the remote state estimation component. This allocation strategy aligns with the objective of minimizing the overall efficiency and benefit of the system.
In
Figure 6, the impact of the weighting parameter
on
is shown. We considered 0.2, 0.5, and 0.8. The results show that as
increased, the total objective value rose. This indicates that offloading time consumption has a greater influence on the objective, suggesting that assigning a smaller weight to offloading time can better optimize system performance.
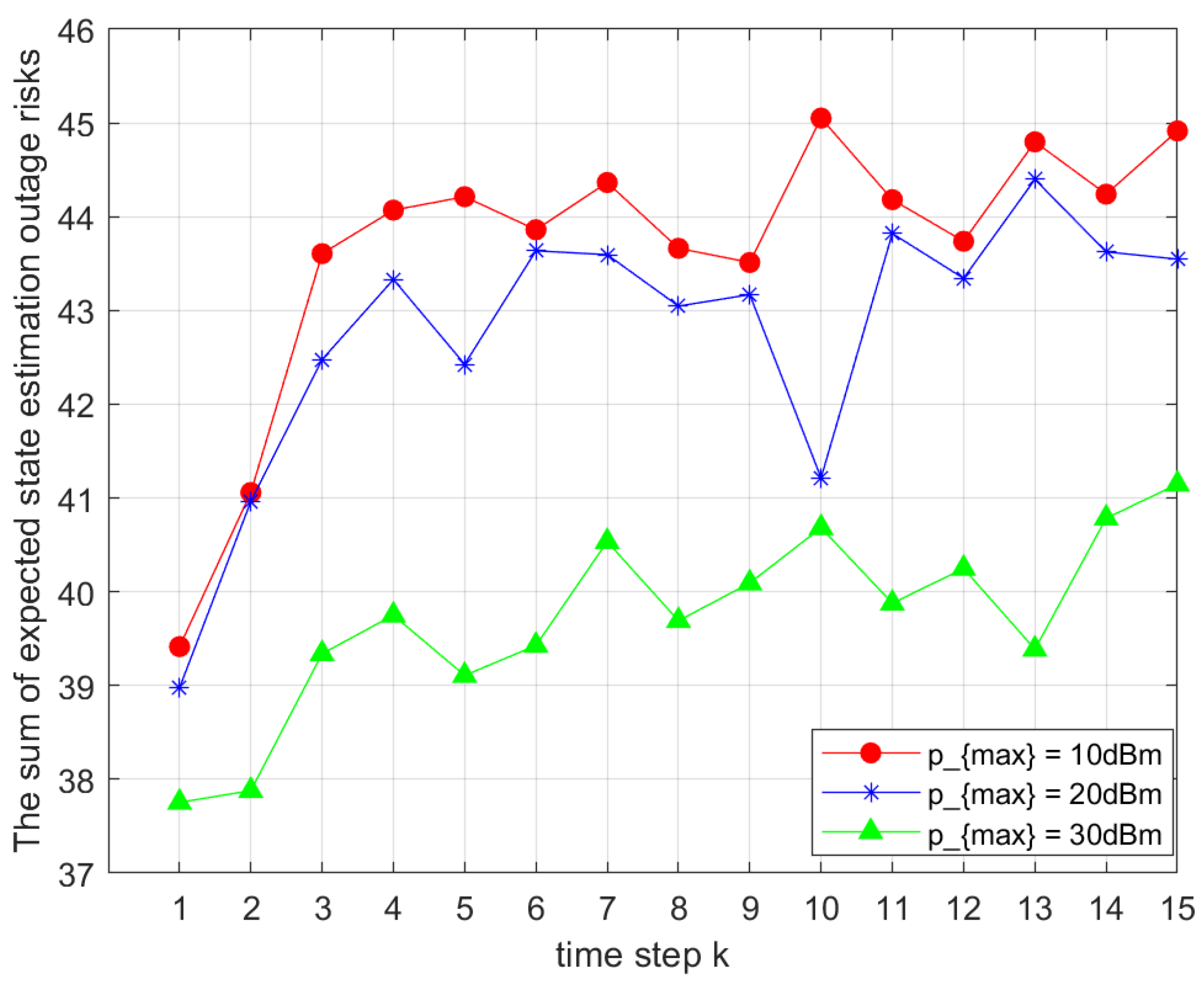
Figure 7 analyzes the impact of maximum transmission power on
. As
increased, the total objective value decreased. This was because higher transmission power strengthened the transmitted signal, thereby improving transmission reliability according to the Shannon–Hartley theorem. However, the resulting increase in power consumption must be considered in practical applications to balance performance and energy efficiency.
In
Figure 8, we analyze how different sensor allocations within each channel group affected
with a fixed total of 12 sensors. Group sizes of two, three, and four sensors were compared. The results show that increasing the number of sensors per group improved system performance by reducing the total objective value. However, it significantly increased computational complexity, with computation time for four sensors per group being approximately 10 times higher than for two or three sensors. Thus, a trade-off between performance and computational cost must be carefully considered.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}