

Adaptive Integrated Navigation Algorithm Based on Interactive Filter



Abstract
1. Introduction
2. System Model of SINS/GNSS Integrated Navigation
2.1. State Equation for SINS/GNSS Integrated Navigation
2.2. Measurement Equation for SINS/GNSS Integrated Navigation
3. Information Fusion Algorithms and Analysis
3.1. Strong Tracking Filter (STF)
3.2. Smooth Variable Structure Filter Algorithm (SVSF)
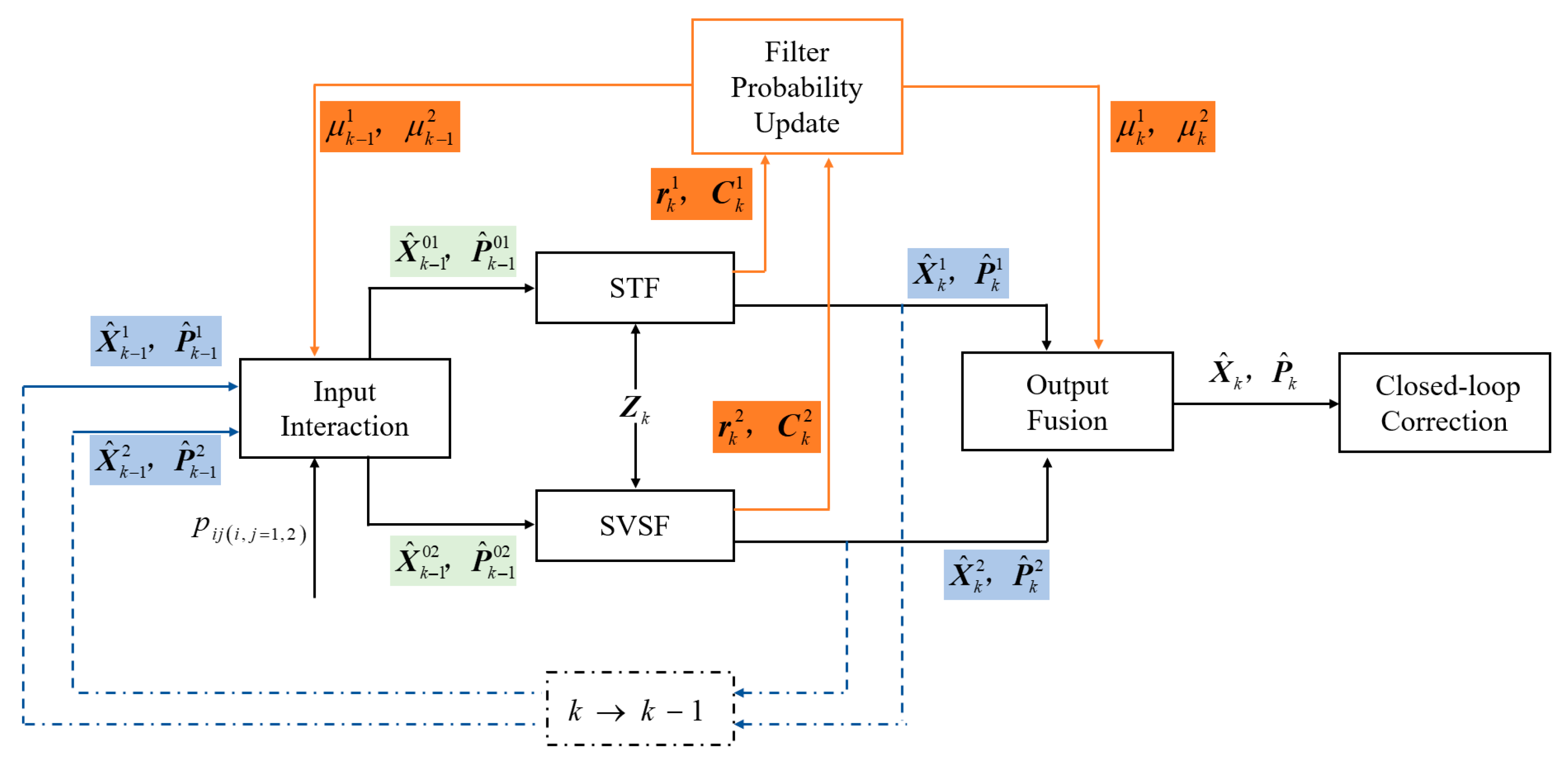
4. Proposed Innovative Interactive Robust Filter Framework Fusing STF and SVSF (IF-STF-SVSF)
- (1)
- Input Interaction
- (2)
- Parallel Filter
- (3)
- Filter Probability Update
- (4)
- Output Fusion
5. Experiment and Discussion
5.1. Experiment Conditions
5.2. Experiment Analysis
- (1)
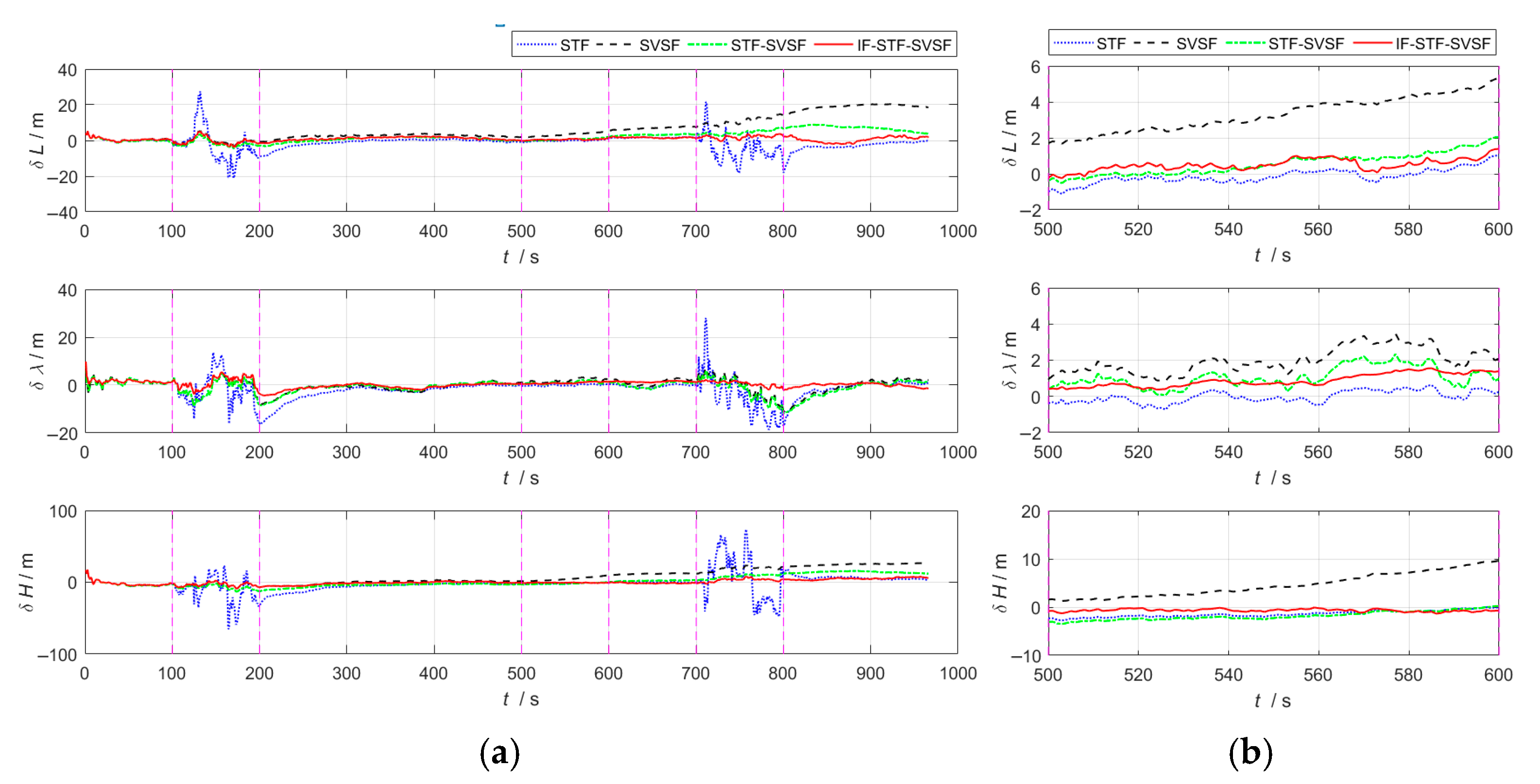
- The STF tends to trust the measurement information. By introducing a time-varying adaptive factor, it can modulate the one-step prediction covariance matrix in real time, thereby mitigating the influence of prior information on state estimation. Even when faced with abnormal measurement information, this algorithm will quickly track the measurement information, resulting in a substantial rise in state estimation error. Therefore, for integrated navigation system based on STF, both its position error and velocity error show a violently fluctuating trend.
- (2)
- The SVSF adopts the idea of variable structure gain and has good robustness against bounded model and noise uncertainties. Compared with the STF, it shows better adaptability under abnormal measurement information conditions, and the velocity and position accuracy are significantly improved.
- (3)
- The STF-SVSF can switch between the STF and the SVSF according to the system state changes, thereby effectively improving the accuracy of state estimation. However, algorithm switching is limited by the fixed bounded layer threshold, which affects the flexibility and adaptability of the algorithm.
- (4)
- In the proposed IF-STF-SVSF, both the STF and the SVSF dynamically adjust the filter model based on the innovation, calculate and update the filter probability, and solve the weighted state estimation. During the period of GNSS abnormal measurement noise, the SVSF can suppress the innovation mismatch, and its filter probability has a great advantage, effectively improving the estimation accuracy. Therefore, overall, the interactive robust estimation algorithm has the highest fusion accuracy of the four compared methods.
- (1)
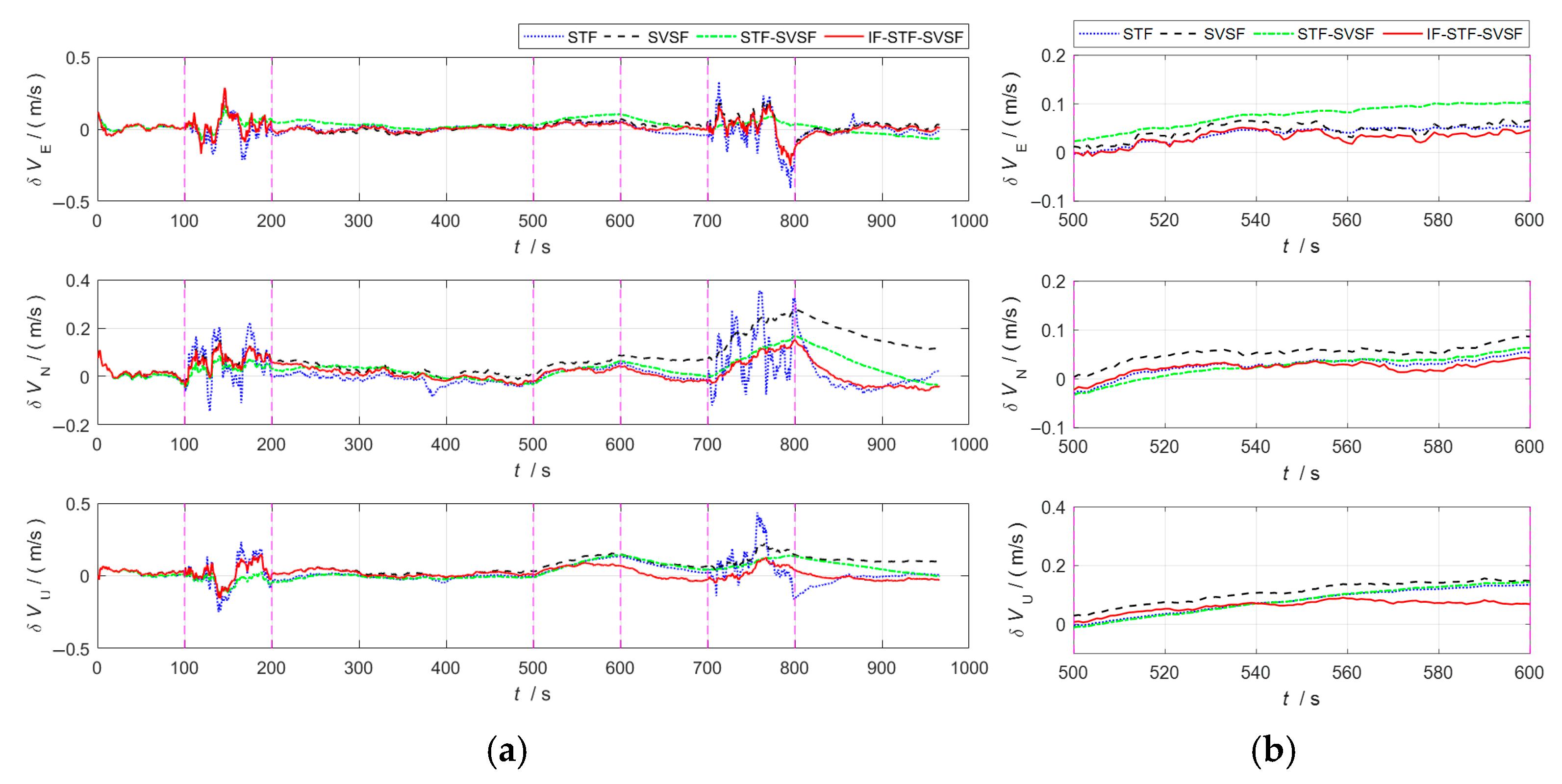
- The STF relies more on measurement information. When the system noise is abnormal, leading to a rise on state estimation error, this algorithm expands one-step prediction covariance matrix according to the innovation mismatch degree, thereby increasing the filter gain. It reduces the usage efficiency of prior information to achieve the purpose of reusing immediate measurement information. Therefore, in the case of changes in the noise characteristics of inertial sensors, the STF can achieve relatively good estimation accuracy.
- (2)
- The SVSF still has good adaptability and robustness when system noise changes and system noise covariance matrix deviate from the true value, and when navigation error is relatively stable. However, since the SVSF sacrifices part of the estimation accuracy for enhanced robustness, its accuracy is inferior to that of the STF.
- (3)
- The STF-SVSF flexibly selects the STF and the SVSF according to the bounded layer threshold, and has a corresponding improvement in state estimation accuracy.
- (4)
- The IF-STF-SVSF can perform real-time calculations based on innovation, update its filter probability, and solve the weighted state estimation. During the period when the inertial measurement unit bias increases, the filter probability of the STF has a major advantage, and the interactive robust estimation algorithm still achieves highest estimation accuracy.
- (1)
- During the phase where both system and measurement noise increase simultaneously, the performance of the STF is disturbed by the abnormal measurements, and the navigation error shows fluctuations.
- (2)
- The SVSF is not sensitive to the types of anomalies. It has good robust characteristics and strong applicability under bounded model conditions and noise uncertainties. Moreover, it maintains good stability of the navigation error.
- (3)
- The STF-SVSF can flexibly switch between the STF and the SVSF in response to the dynamic changes in the system state, which improves the accuracy of the state estimation.
- (4)
- Integrated navigation based on the IF-STF-SVSF provides the optimal estimation information with bias constraints through the likelihood function during the process of interactive fusion. This makes the estimation residual after fusion decrease further, and its navigation accuracy has more advantages over the comparison algorithms.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zou, Z.H.; Wei, Z.H. Separation algorithm of fixed wing UAV positioning signal based on AI. Adv. Hybrid Inf. Process. 2023, 468, 300–312. [Google Scholar]
- Wang, Z.M.; Zou, F.; Ma, Z.W.; Liu, T.Q.; Niu, Y.F. Flight corridor construction method for fixed-wing UAV obstacle avoidance. In Proceedings of the 2022 International Conference on Autonomous Unmanned Systems (ICAUS 2022), Xi’an, China, 23–25 September 2022; Fu, W., Gu, M., Niu, Y., Eds.; Springer: Singapore, 2023; Volume 1010, pp. 1808–1818. [Google Scholar]
- Irfan, M.; Dalai, S.; Trslic, P.; Riordan, J.; Dooly, G. LSAF-LSTM-based self-adaptive multi-sensor fusion for robust UAV state estimation in challenging environments. Machines 2025, 13, 130. [Google Scholar] [CrossRef]
- Bei, H.H.; Liu, Y.B.; Li, W.H.; Huang, Y. Application and development trend of unmanned aerial vehicle navigation technology. In Proceedings of the 2nd International Conference on Computer Science Communication and Network Security (CSCN2020), Sanya, China, 22–23 December 2020; p. 04006. [Google Scholar]
- Cao, Z.Y.; Chen, G. Research on collaborative multi-UAV localization method based on combination navigation information. Proc. Inst. Mech. Eng. Part C. J. Mech. Eng. Sci. 2024, 238, 10426–10438. [Google Scholar] [CrossRef]
- Zhao, G.L.; Wang, Y.; Wang, X. Error compensation method of GNSS/INS integrated navigation system based on PSO-LSTM. Adv. Space Res. 2025, 75, 8657–8666. [Google Scholar] [CrossRef]
- Javad, F.; Jafar, K.; Farrokh, J.S. Design and implementation of an adaptive unscented Kalman filter with interval Type-3 fuzzy set for an attitude and heading reference system considering gyroscope bias. Mech. Syst. Signal Process. 2025, 223, 111870. [Google Scholar]
- Yang, Y.; Ding, J.; Shen, D.Z.; Hao, T.Y. Optimal information fusion-based strong tracking filter for state of charge estimation of lithium-ion batteries. J. Electrochem. Soc. 2023, 170, 090528. [Google Scholar] [CrossRef]
- Yang, H.T.; Tang, Y.C.; Yu, W.B.; Zhang, H.T. Robust pedestrian tracking in video sequences using an improved STF module. Complex Intell. Syst. 2024, 10, 1365–1374. [Google Scholar] [CrossRef]
- Wang, J.W.; Ma, Z.; Chen, X.Y. Generalized dynamic fuzzy NN model based on multiple fading factors SCKF and its application in integrated navigation. IEEE Sens. J. 2021, 21, 3680–3693. [Google Scholar] [CrossRef]
- Ahmed, H.; Ullah, I.; Khan, U.; Qureshi, M.B. Adaptive filtering on GPS-aided MEMS-IMU for optimal estimation of ground vehicle trajectory. Sensors 2019, 19, 5357. [Google Scholar] [CrossRef] [PubMed]
- Habibi, S. The smooth variable structure filter. Proc. IEEE 2007, 95, 1026–1059. [Google Scholar] [CrossRef]
- Avzayesh, M.; Abdel-Hafez, M.; Alshabi, M.; Gadsden, S.A. The smooth variable structure filter: A comprehensive review. Digit. Signal Process. 2021, 110, 102912. [Google Scholar] [CrossRef]
- Chen, S.; Shi, Z.; Ding, J.C. Application of the 2nd-order smooth variable structure filter algorithm for SINS initial alignment. In Proceedings of the 2017 Forum on Cooperative Positioning and Service, Harbin, China, 19–21 May 2017; pp. 20–21. [Google Scholar]
- Dhahbane, D.; Nemra, A.; Sakhi, S. Robust attitude estimation for an unmanned aerial vehicle using multiple GPS receivers. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2022, 236, 3540–3553. [Google Scholar] [CrossRef]
- Li, C.; Shen, Q.; Qin, W.W.; Duan, Z.Q.; Wang, L.X. MIMU /BDS integrated navigation technology based on smooth variable structure-adaptive Kalman filter. Aero Weapon. 2021, 28, 51–58. [Google Scholar]
- Gadsden, S.; Habibi, S.A. New robust filtering strategy for linear systems. J. Dyn. Syst. Meas. Control 2013, 135, 014503. [Google Scholar] [CrossRef]
- Zhao, B.; Zeng, Q.H.; Liu, J.Y.; Gao, C.L.; Zhao, T.Y.; Li, R.B. A novel interactive robust filter algorithm for GNSS/SINS integrated navigation. Proc. Inst. Mech. Eng. Part G J. Aerosp. Engineering 2023, 237, 1779–1790. [Google Scholar] [CrossRef]
- Liu, J.Y.; Zeng, Q.H.; Zhao, W. Navigation System Theory and Application; Northwestern Polytechnical University Press: Xi’an, China, 2010. [Google Scholar]
- Hashlamon, I.; Erbatur, K. An improved real-time adaptive Kalman filter with recursive noise covariance updating rules. Turk. J. Electr. Eng. Comput. Sci. 2016, 24, 524–540. [Google Scholar] [CrossRef]
- Zhao, B.; Zeng, Q.H.; Liu, J.Y.; Gao, C.L.; Zhao, T.Y. A new polar alignment algorithm based on the Huber estimation filter with the aid of BeiDou Navigation Satellite System. Int. J. Distrib. Sens. Netw. 2021, 17. [Google Scholar] [CrossRef]
- Ge, Z.L.; Jia, G.C.; Zhi, Y.Q.; Zhang, X.R.; Zhang, J.Y. Strong tracking extended particle filter for manoeuvring target tracking. IET Radar Sonar Navig. 2020, 14, 1708–1716. [Google Scholar] [CrossRef]
- Liu, S.Y.; Gao, M.; Huai, W.X.; Sheng, L. Federated strong tracking filtering for nonlinear systems with multiple sensors. Trans. Inst. Meas. Control 2022, 44, 3141–3153. [Google Scholar] [CrossRef]
- Li, Y.W.; Li, G.; Liu, Y.; Zhang, X.P.; He, Y. A Novel Smooth Variable Structure Filter for Target Tracking Under Model Uncertainty. IEEE Trans. Intell. Transp. Syst. 2022, 23, 5823–5839. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Measurement | Noise | Value |
|---|---|---|---|
| SINS | Gyro | Constant bias | 0.01 deg/h |
| Angular random walk | 0.001 deg/sqrt(h) | ||
| Accelerometer | Constant bias | 100 μg | |
| Velocity random walk | 10 μg/sqrt(Hz) | ||
| GNSS | Velocity | Error noise | 0.1 m/s |
| Position | Error noise | 10 m, 10 m, 30 m |
| Time (s) | Sensors | Fault Type | Fault Value |
|---|---|---|---|
| 100–200 | GNSS | velocity error noise | 0.5 m/s |
| position error noise | 50 m, 50 m, 150 m | ||
| 500–600 | SINS | Accelerometer constant bias | 300 μg |
| Gyro constant bias | 0.03 deg/h | ||
| 700–800 | GNSS | velocity error noise | 0.5 m/s |
| position error noise | 50 m, 50 m, 150 m | ||
| SINS | Accelerometer constant bias | 300 μg | |
| Gyro constant bias | 0.03 deg/h |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, B.; Gao, C.; Xia, H.; Han, J.; Zhu, Y. Adaptive Integrated Navigation Algorithm Based on Interactive Filter. Sensors 2025, 25, 4562. https://doi.org/10.3390/s25154562
Zhao B, Gao C, Xia H, Han J, Zhu Y. Adaptive Integrated Navigation Algorithm Based on Interactive Filter. Sensors. 2025; 25(15):4562. https://doi.org/10.3390/s25154562
Chicago/Turabian StyleZhao, Bin, Chunlei Gao, Hui Xia, Jinxia Han, and Ying Zhu. 2025. "Adaptive Integrated Navigation Algorithm Based on Interactive Filter" Sensors 25, no. 15: 4562. https://doi.org/10.3390/s25154562
APA StyleZhao, B., Gao, C., Xia, H., Han, J., & Zhu, Y. (2025). Adaptive Integrated Navigation Algorithm Based on Interactive Filter. Sensors, 25(15), 4562. https://doi.org/10.3390/s25154562