
Implementation Method and Bench Testing of Fractional-Order Biquadratic Transfer Function-Based Mechatronic ISD Suspension

 ,
,  , and
, and
Abstract
1. Introduction
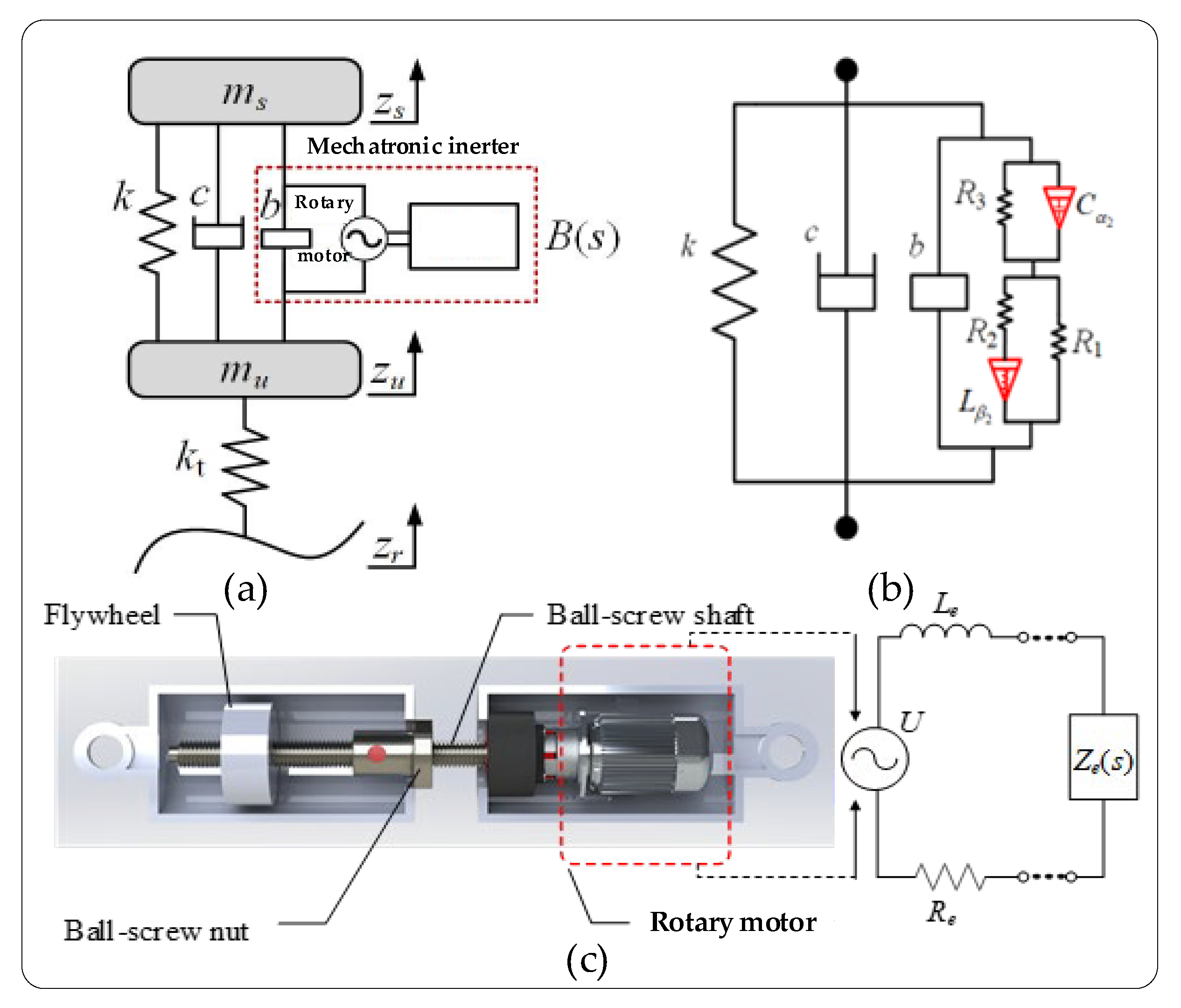
2. The Fractional-Order Biquadratic Transfer Function-Based Mechatronic ISD Suspension
3. Parameters’ Effects on Suspension’s Dynamic Performance
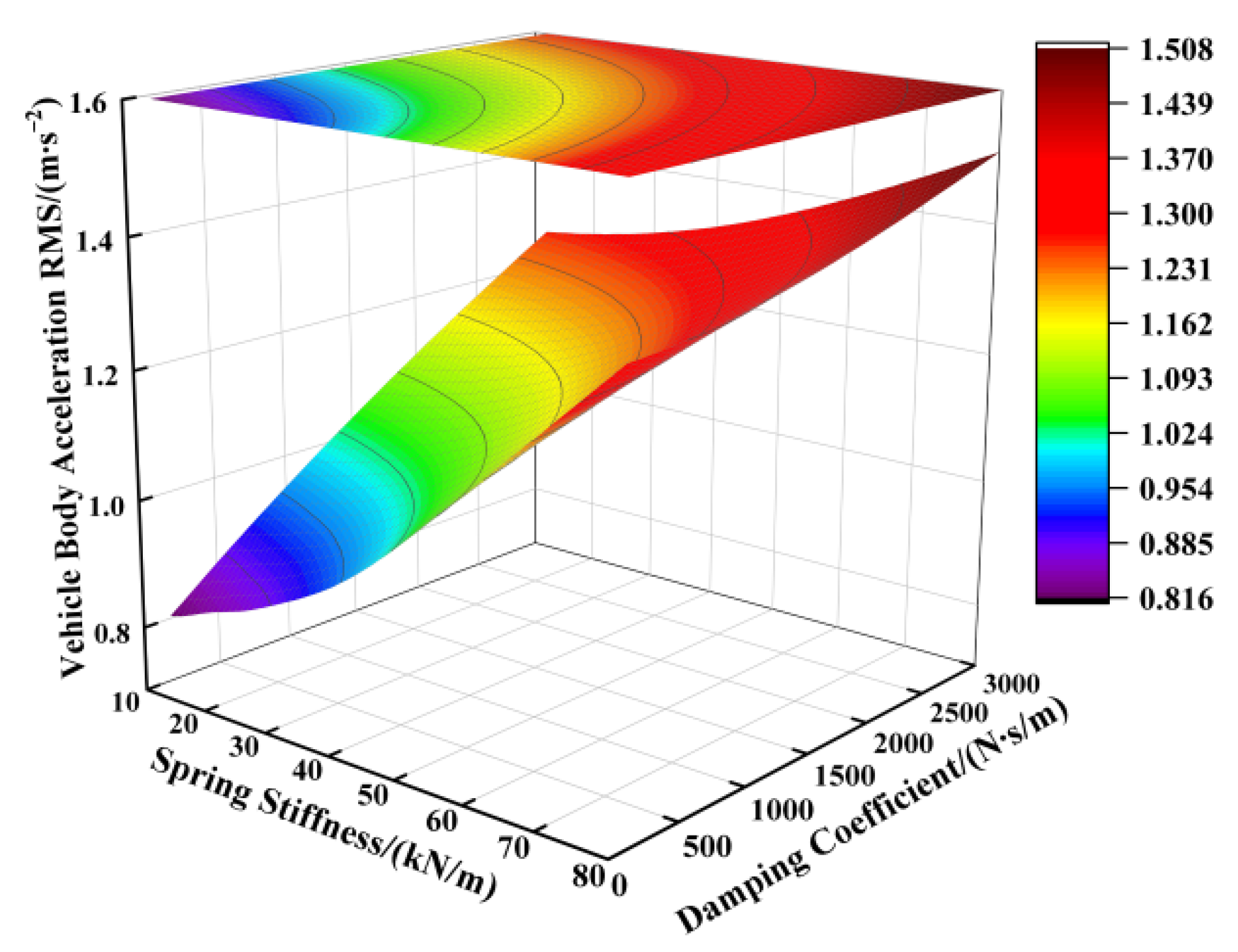
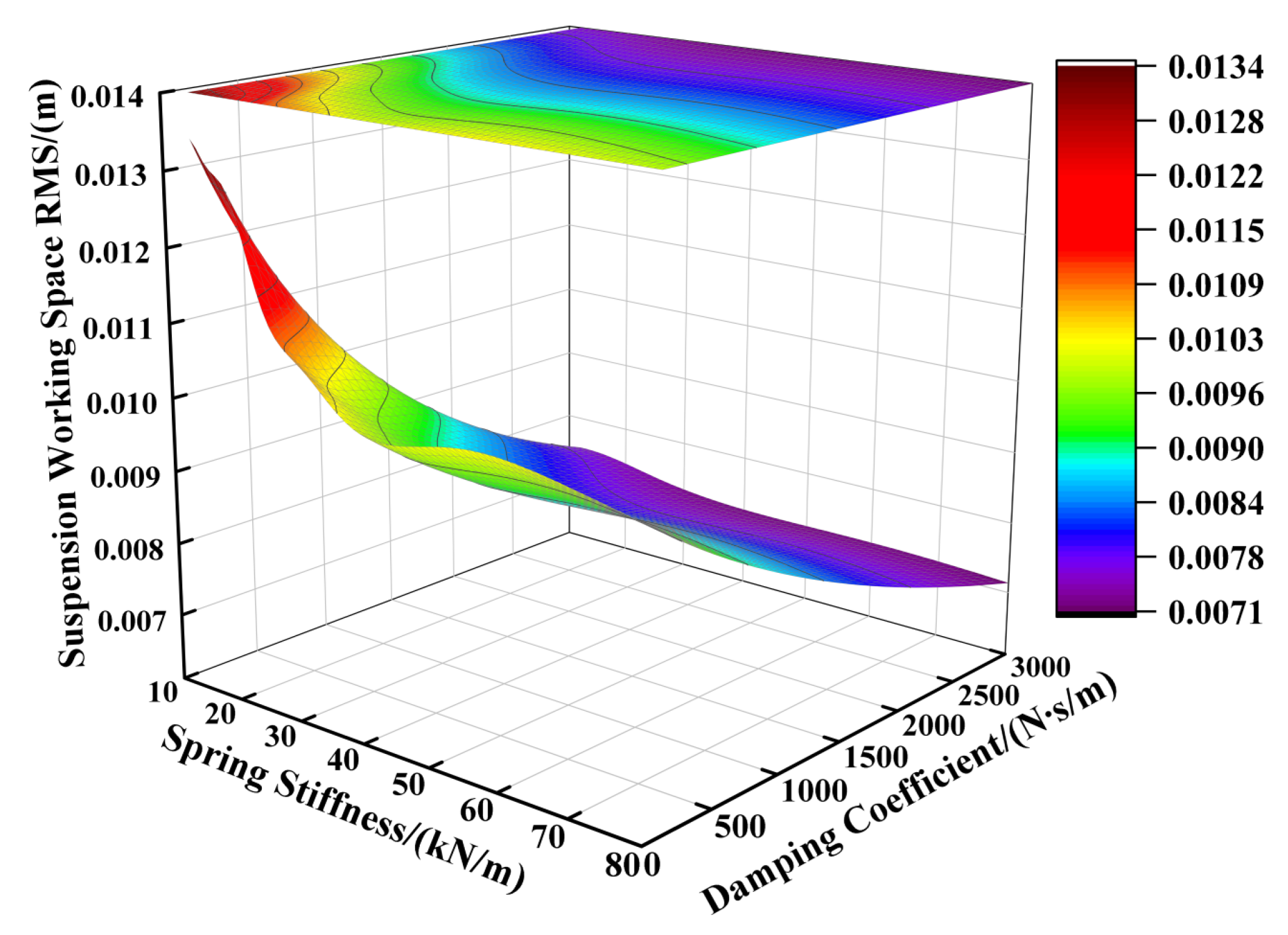
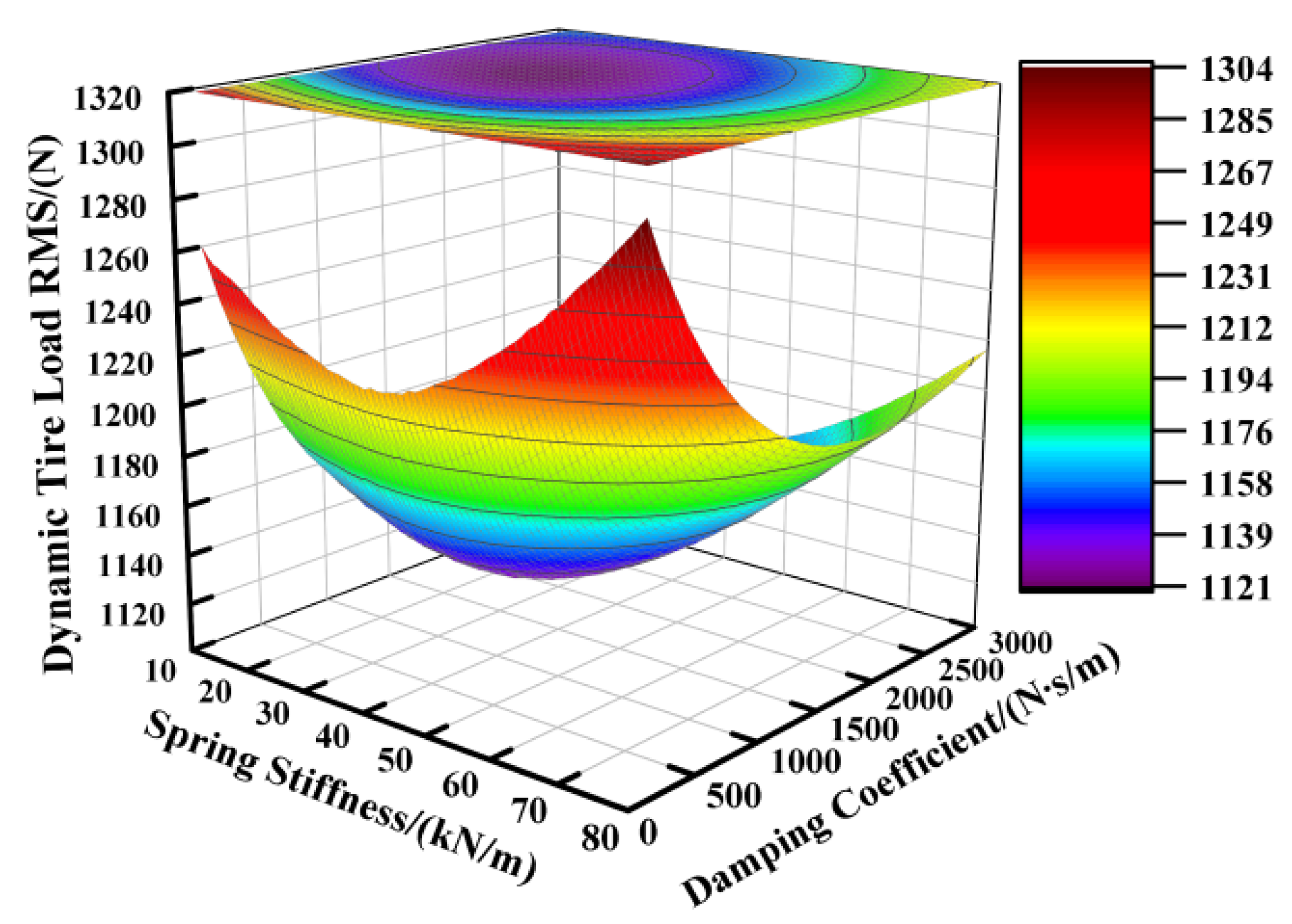
3.1. Influence of Spring and Damper Parameters on Suspension’s Dynamic Performance
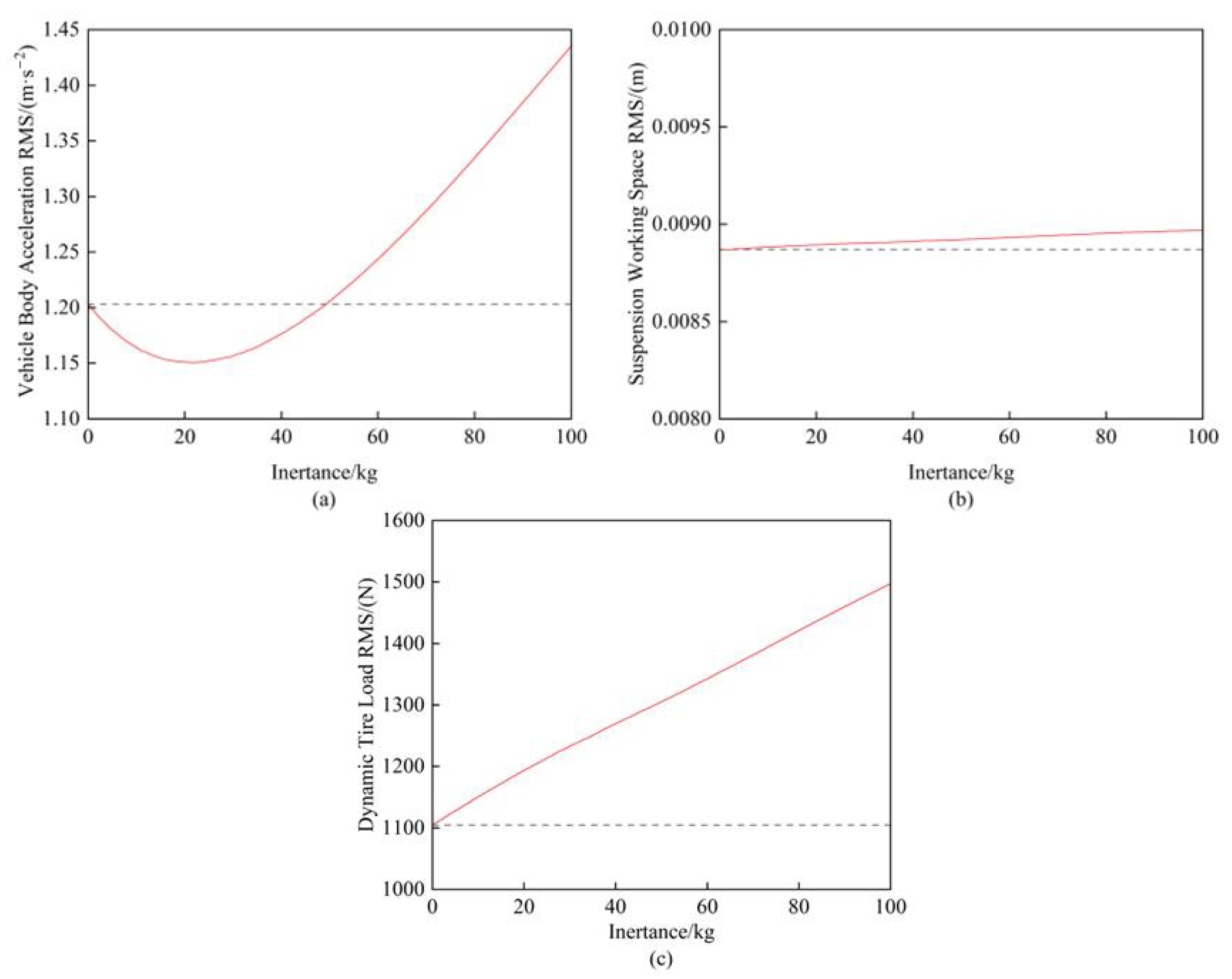
3.2. Influence of Inertance on Suspension’s Dynamic Performance
3.3. Influence of Electrical Resistances on Suspension’s Dynamic Performance
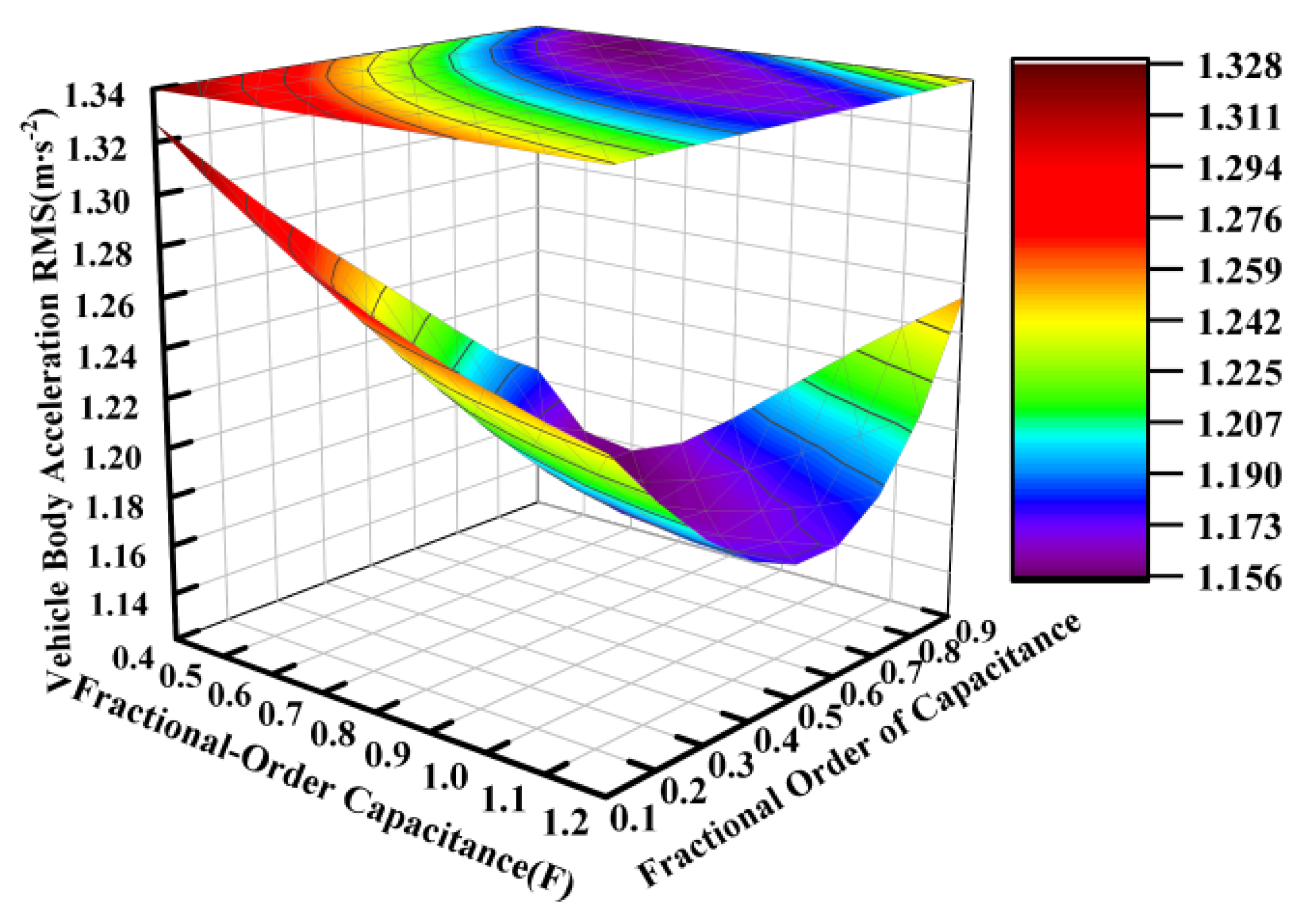
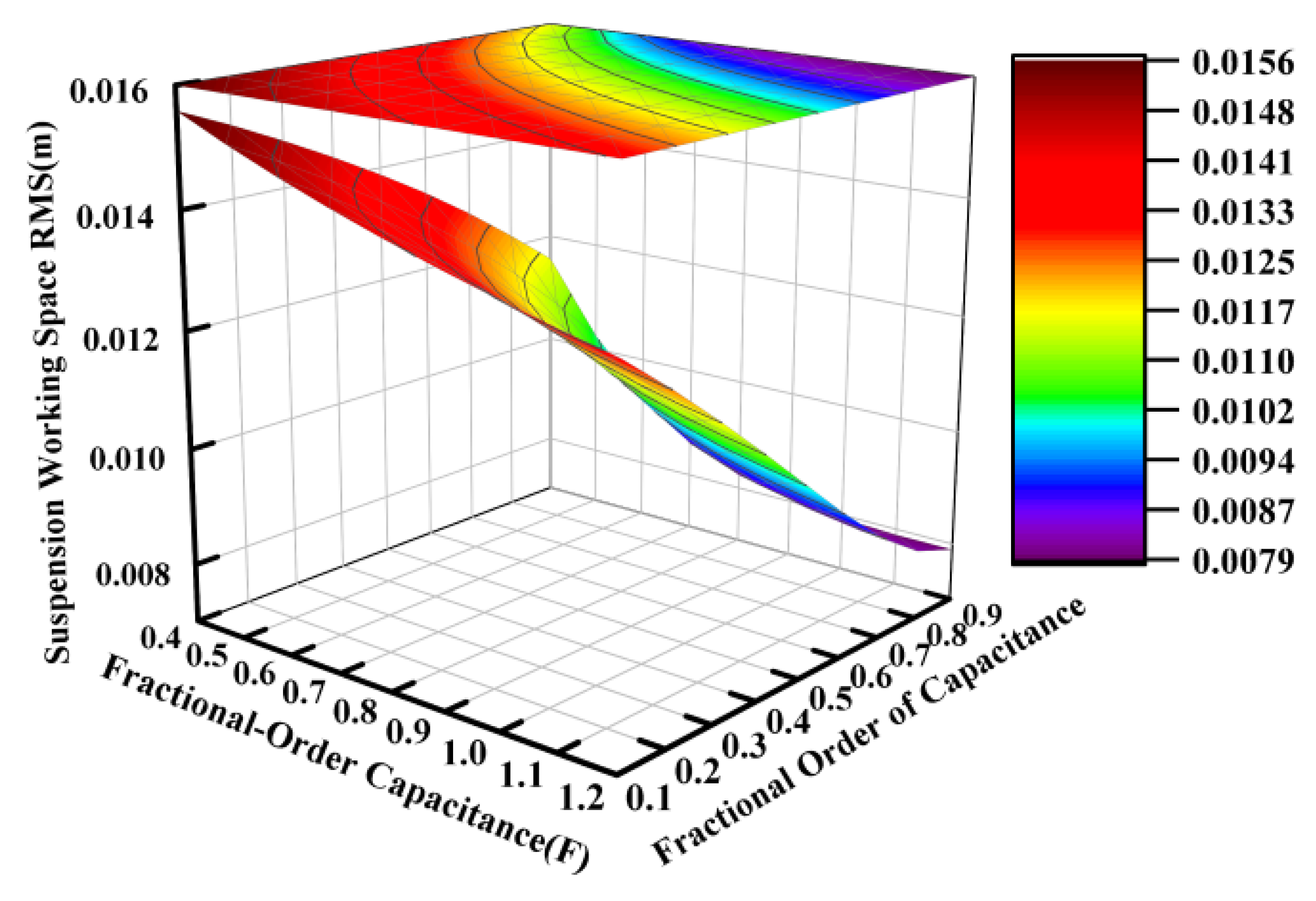
3.4. Influence of Fractional-Order Capacitance on Suspension’s Dynamic Performance
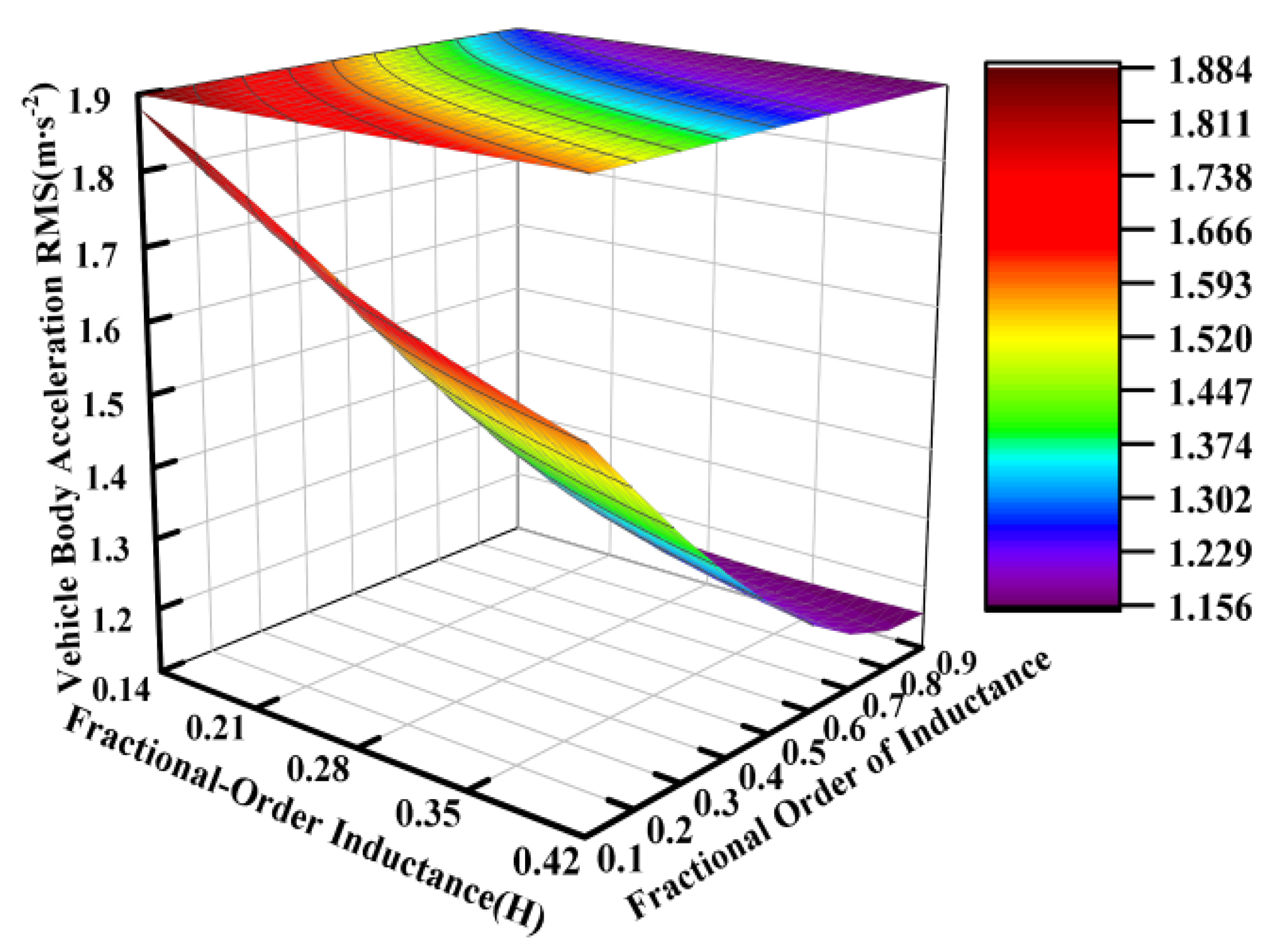
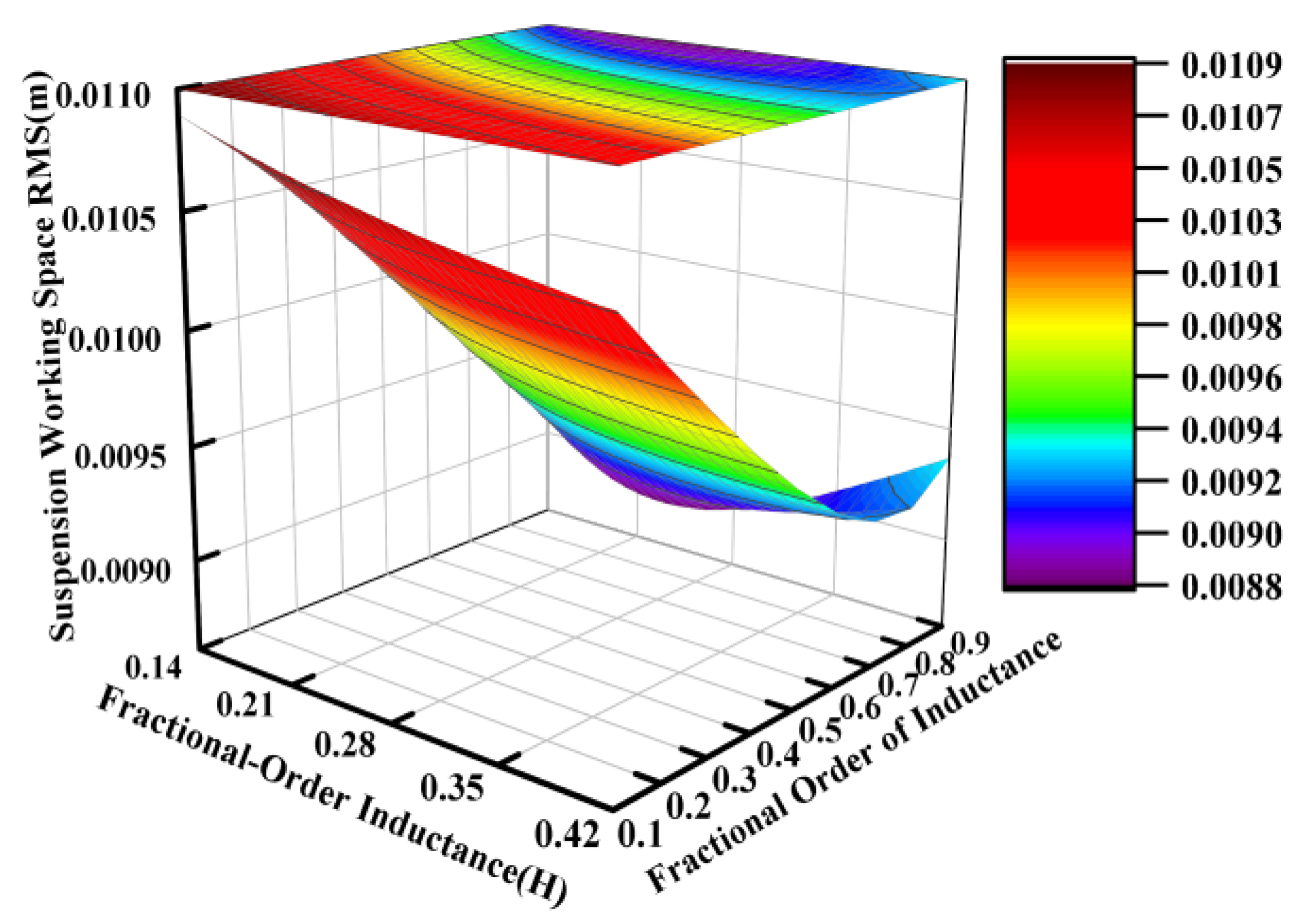
3.5. Influence of Fractional-Order Inductance on Suspension’s Dynamic Performance
4. The Implementation of the Fractional-Order Biquadratic Transfer Function-Based Mechatronic ISD Suspension
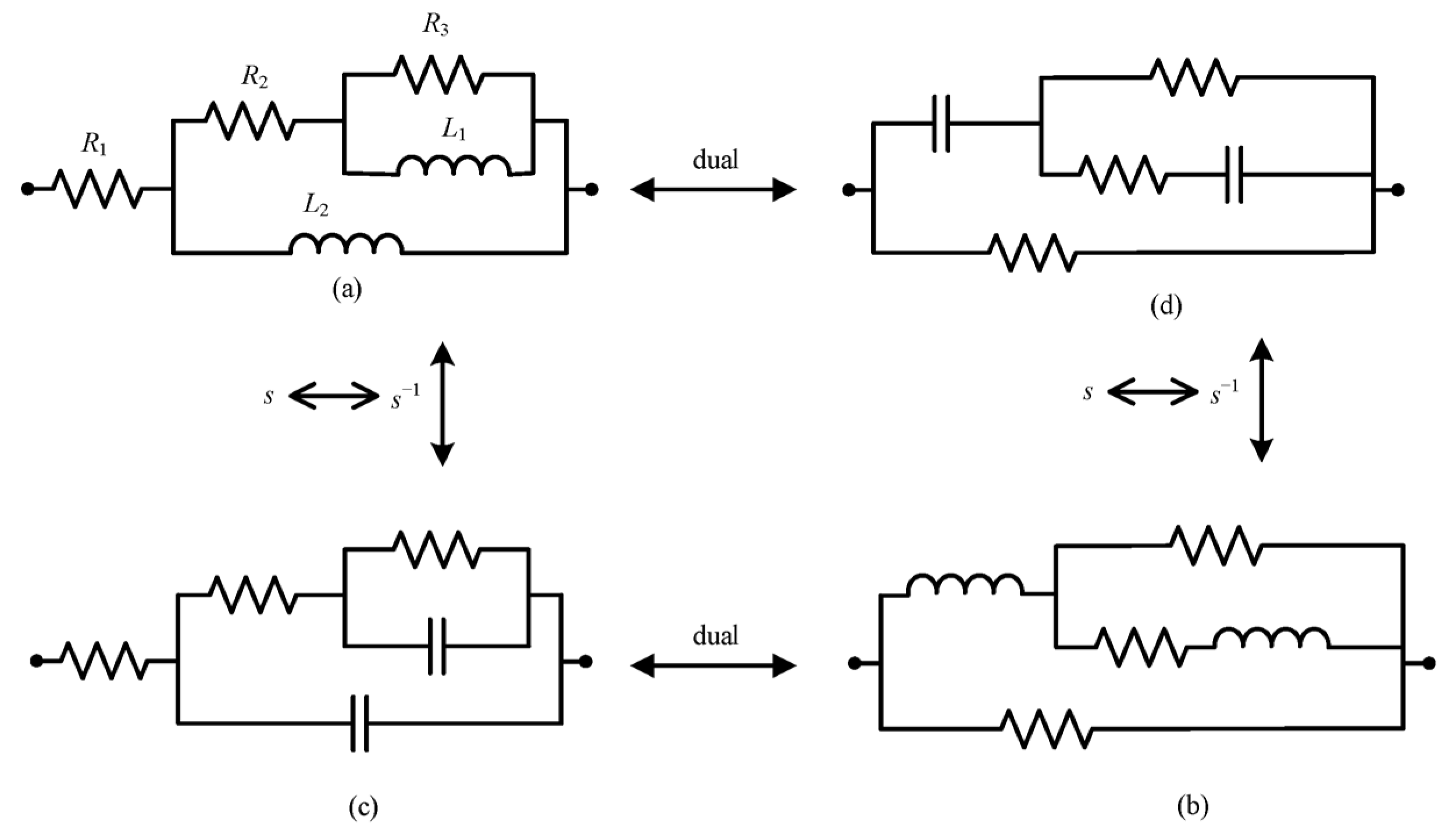
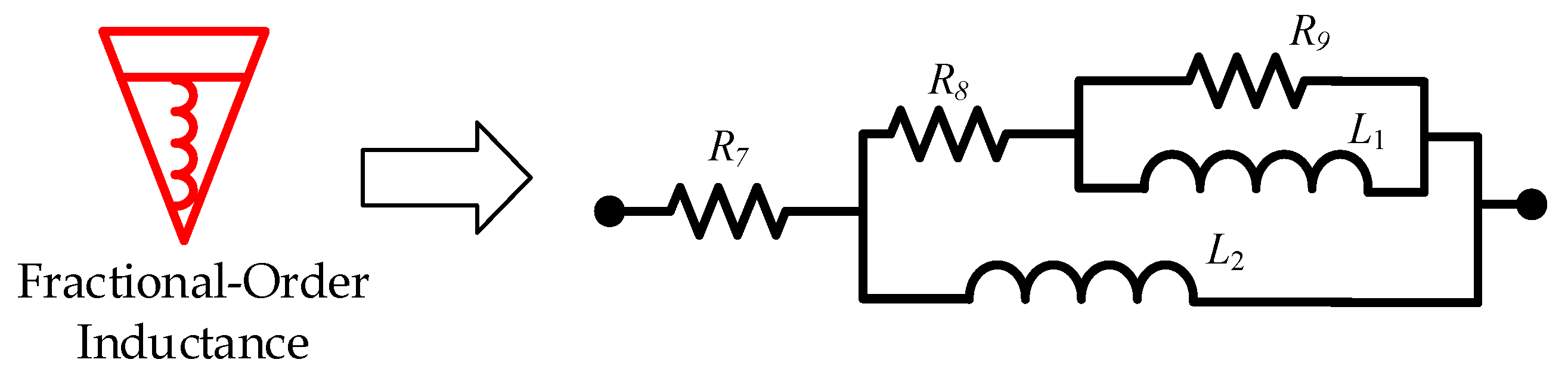
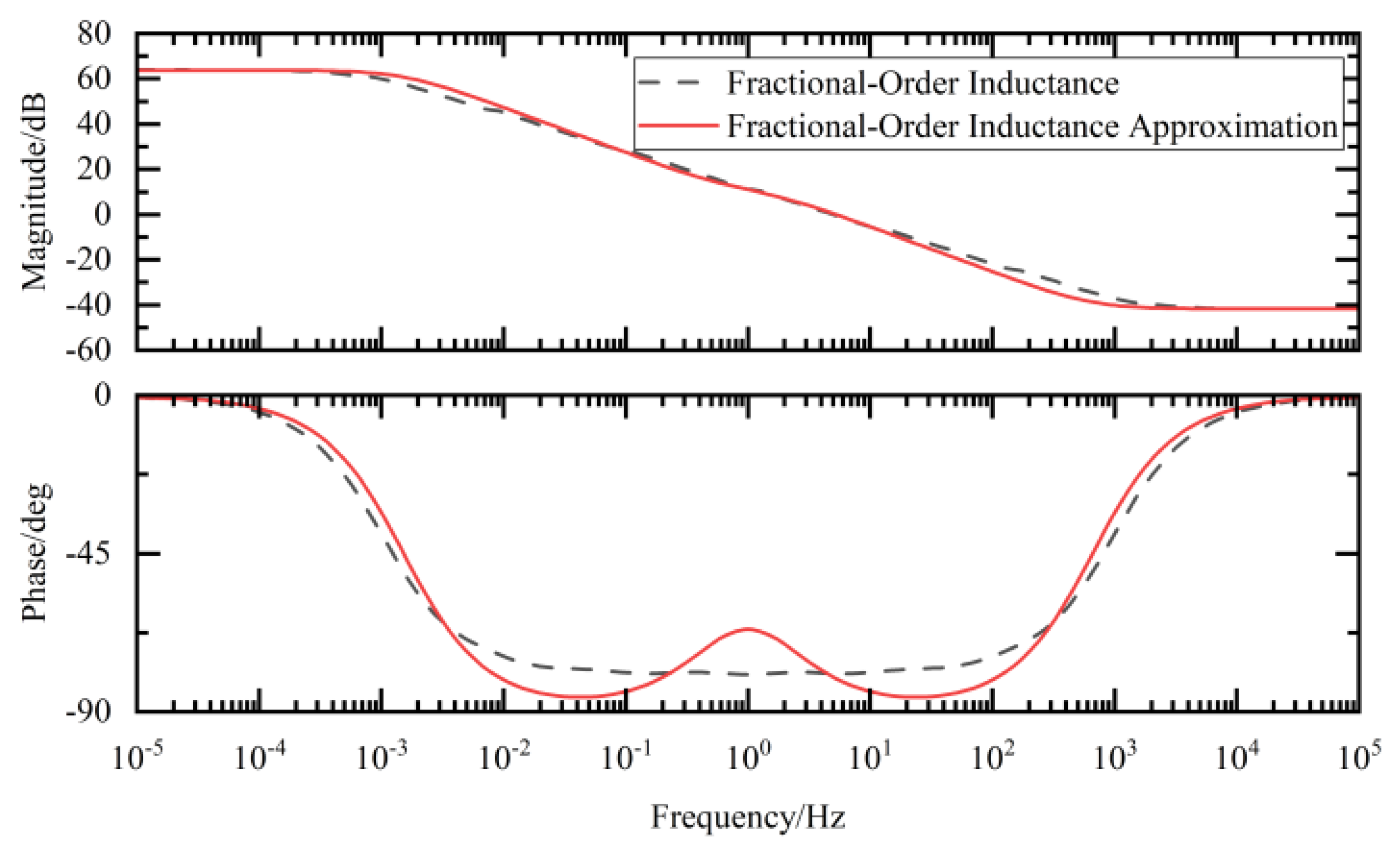
4.1. Realization Methods for Fractional-Order Electrical Components

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Topology | Necessary and Sufficient Conditions |
|---|---|
| Figure 13a,b | Kc ≤ 0, W ≥ 1 |
| Figure 13c,d | Kc ≤ 0, W ≤ 1 |
| Figure 14a | Kc ≥ 0, W ≥ 1, λc ≥ 0 |
| Figure 14b | Kc ≥ 0, W ≥ 1, λc ≥ 0 |
| Figure 14c | Kc ≥ 0, W ≤ 1, λc ≥ 0 |
| Figure 14d | Kc ≥ 0, W ≤ 1, λc ≥ 0 |
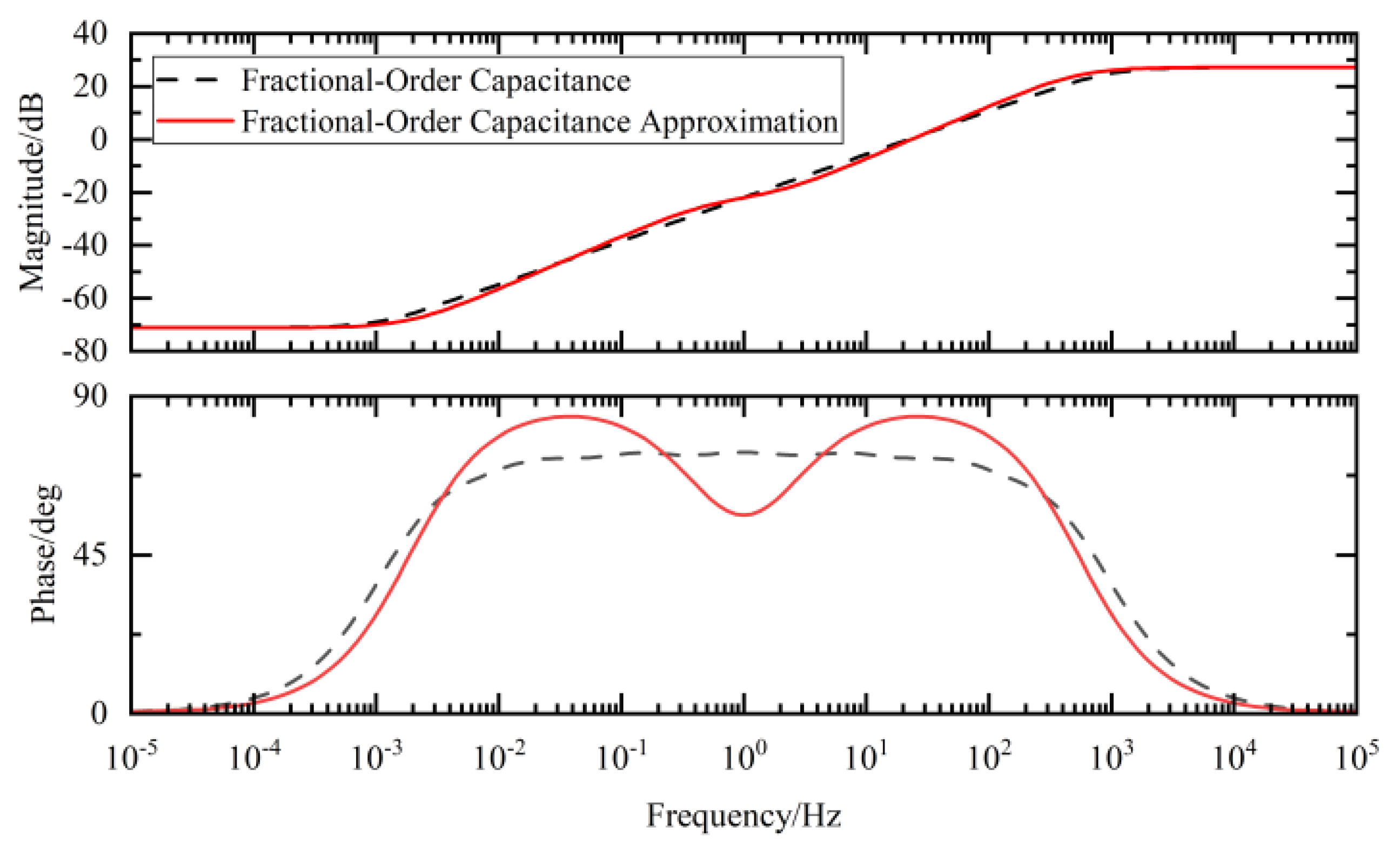
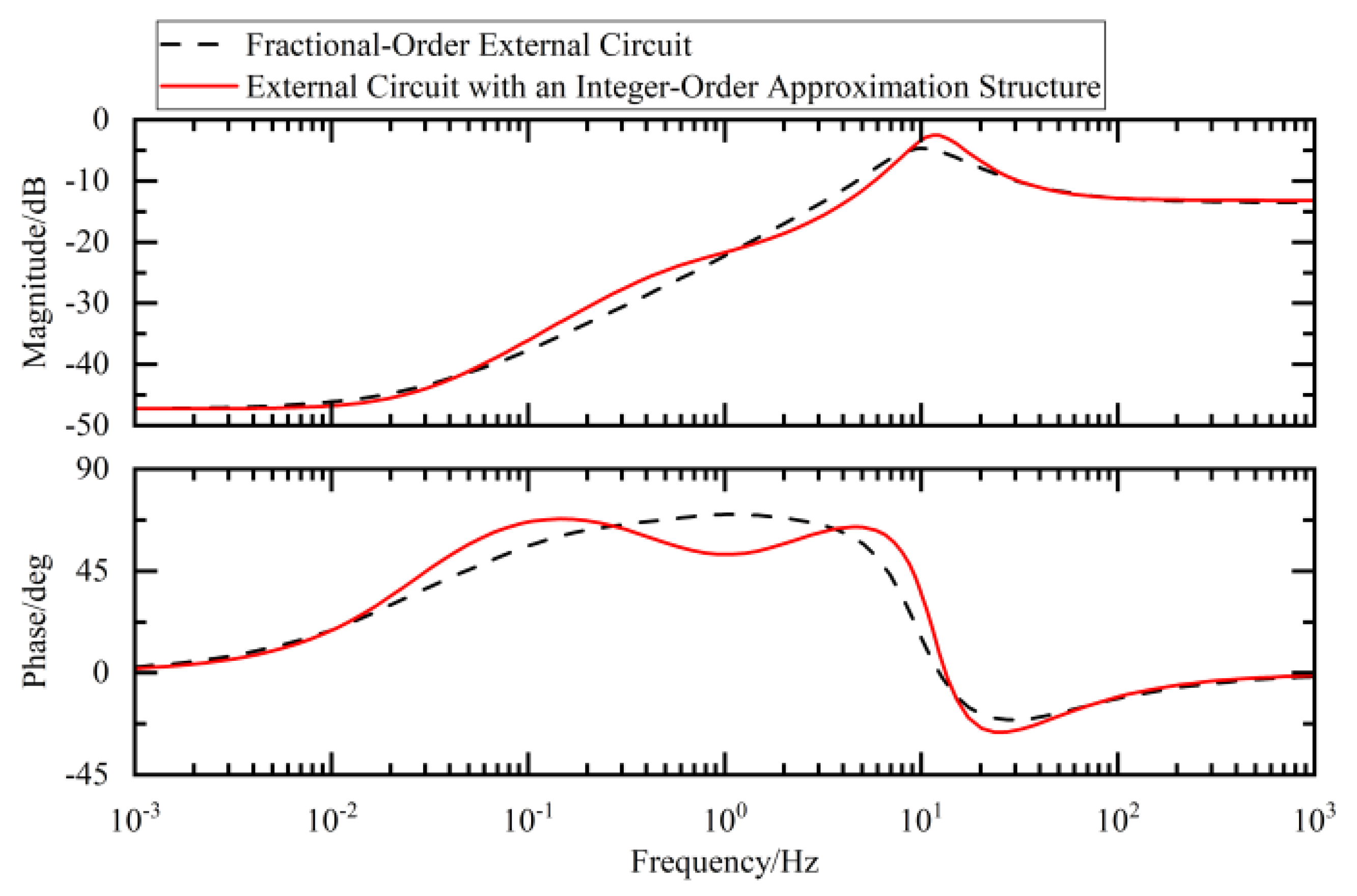
4.2. Simulation Verification of Integer-Order Approximation Circuits
4.3. Comparison of Integer-Order Approximation Suspension’s Dynamic Performance Errors
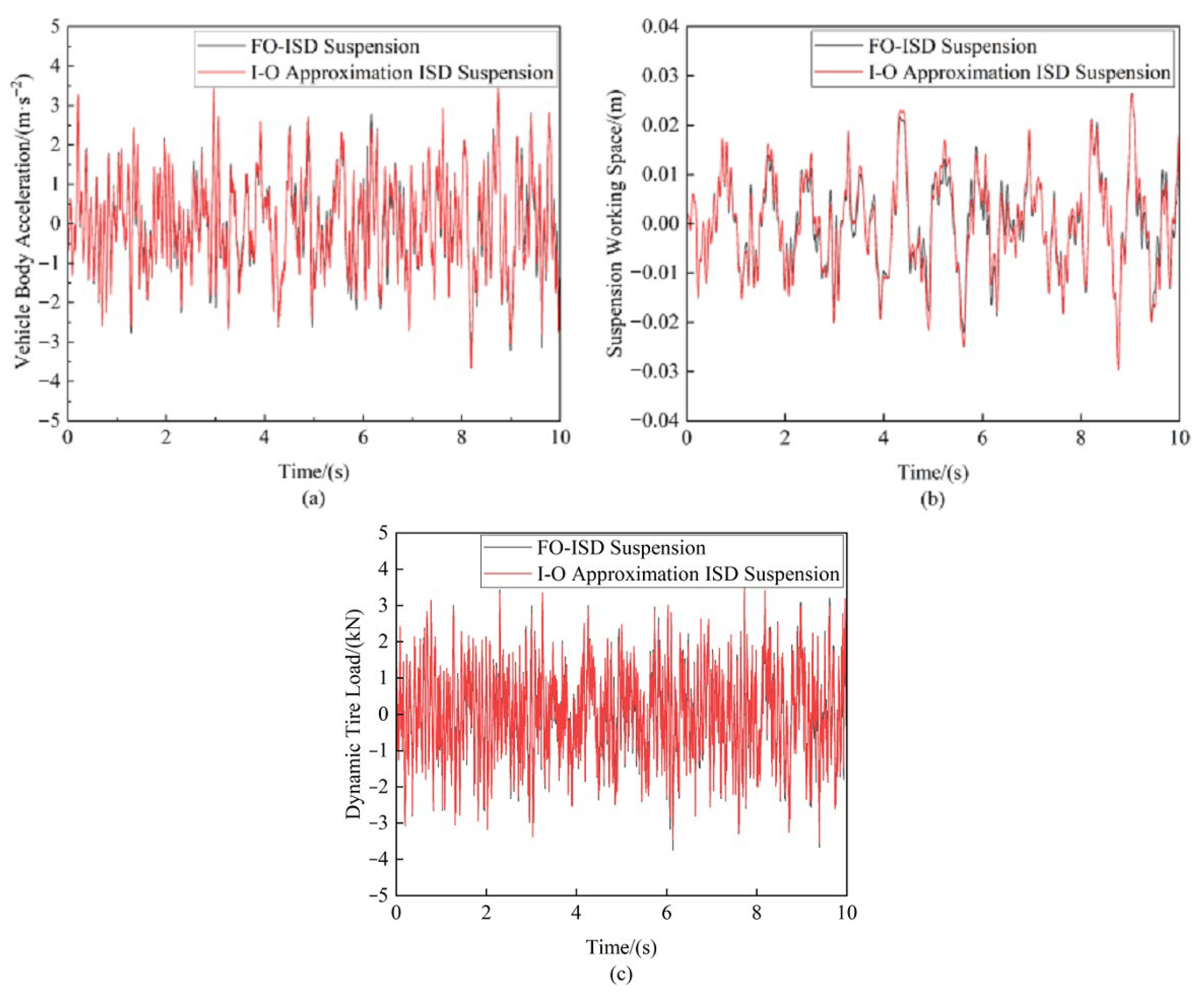
4.3.1. Comparison of Suspension’s Performance Regarding Time-Domain Errors
4.3.2. Frequency-Domain Error Comparison of Suspension Performance
4.3.3. Impulse Road Excitation Error Comparison of Suspension Performance
5. Experimental Verification
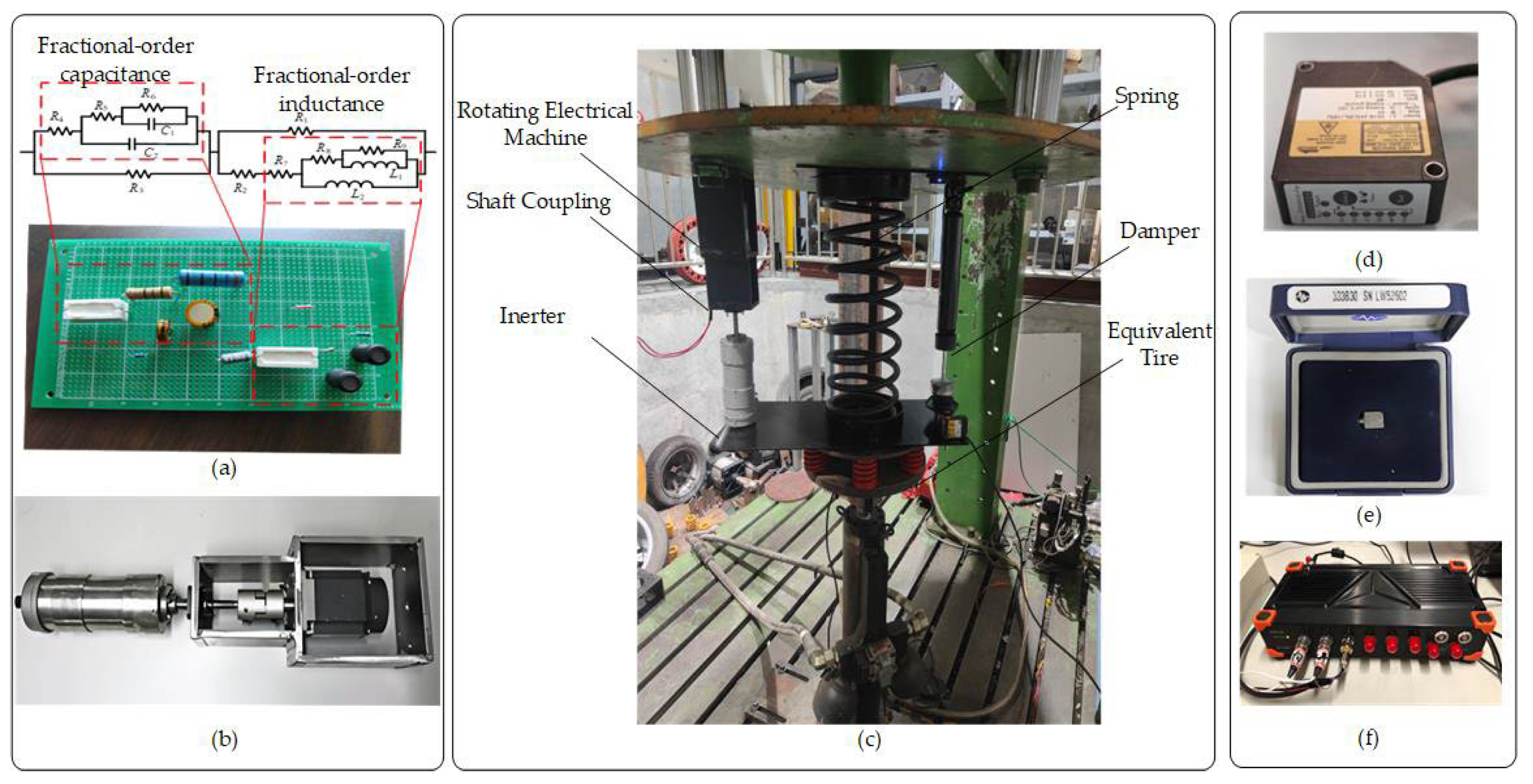
5.1. Experimental Device
5.2. Random Road Excitation Testing
6. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ISD | Inerter–spring–damper |
| RMS | Root mean square |
| LF | Low-frequency |
| HF | High-frequency |
| PTP | Peak-to-peak |
| I-O | Integer-order |
| FO | Fractional-order |
References
- Zhou, Z.; Wang, Y.; Zhou, G.; Nam, K.; Ji, Z.; Yin, C. A twisted Gaussian risk model considering target vehicle longitudinal-lateral motion states for host vehicle trajectory planning. IEEE Trans. Intell. Transp. Syst. 2023, 24, 13685–13697. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Y.; Zhang, R.; Ding, F.; Wei, C.; Lu, J.-G. A LiDAR-OpenStreetMap matching method for vehicle global position initialization based on boundary directional feature extraction. IEEE Trans. Intell. Veh. 2024, 9, 7485–7497. [Google Scholar] [CrossRef]
- Chen, S.; Zhou, Y.; Tang, Z.; Lu, S. Modal vibration response of rice combine harvester frame under multi-source excitation. Biosyst. Eng. 2020, 194, 177–195. [Google Scholar] [CrossRef]
- Shen, Y.J.; Li, J.Y.; Huang, R.N.; Yang, X.F.; Chen, J.J.; Chen, L.; Li, M. Vibration control of vehicle ISD suspension based on the fractional-order SH-GH strategy. Mech. Syst. Signal Process. 2025, 234, 112880. [Google Scholar] [CrossRef]
- Yang, X.F.; Zhang, T.Y.; Shen, Y.J.; Liu, Y.L.; Bui, V.; Qiu, D.D. Tradeoff analysis of the energy-harvesting vehicle suspension system employing inerter element. Energy 2024, 308, 132841. [Google Scholar] [CrossRef]
- Xu, L.; Chai, X.; Gao, Z.; Li, Y.; Wang, Y. Experimental study on driver seat vibration characteristics of crawler-type combine harvester. Int. J. Agric. Biol. Eng. 2019, 12, 90–97. [Google Scholar] [CrossRef]
- Cui, L.; Mao, H.; Xue, X.; Ding, S.; Qiao, B. Optimized design and test for a pendulum suspension of the crop spray boom in dynamic conditions based on a six DOF motion simulator. Int. J. Agric. Biol. Eng. 2018, 11, 76–85. [Google Scholar] [CrossRef]
- Cui, L.; Xue, X.; Le, F.; Mao, H.; Ding, S. Design and experiment of electro hydraulic active suspension for controlling the rolling motion of spray boom. Int. J. Agric. Biol. Eng. 2019, 12, 72–81. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, L.; Wang, R.; Xu, X.; Shen, Y.; Liu, Y. Modeling and test on height adjustment system of electrically-controlled air suspension for agricultural vehicles. Int. J. Agric. Biol. Eng. 2016, 9, 40–47. [Google Scholar] [CrossRef]
- Li, J.; Nie, Z.; Chen, Y.; Ge, D.; Li, M. Development of boom posture adjustment and control system for wide spray boom. Agriculture 2023, 13, 2162. [Google Scholar] [CrossRef]
- Smith, M.C. Synthesis of mechanical networks: The inerter. IEEE Trans. Autom. Control 2002, 47, 1648–1662. [Google Scholar] [CrossRef]
- Barredo, E.; Rojas, G.L.; Mayén, J.; Flores-Hernández, A.A. Innovative negative-stiffness inerter-based mechanical networks. Int. J. Mech. Sci. 2021, 205, 106597. [Google Scholar] [CrossRef]
- Papageorgiou, C.; Houghton, N.E.; Smith, M.C. Experimental testing and analysis of inerter devices. Dyn. Syst. Meas. Control. 2009, 131, 011001. [Google Scholar] [CrossRef]
- Shen, Y.J.; Qiu, D.D.; Yang, X.F.; Chen, J.; Guo, Y.; Zhang, T. Vibration isolation performance analysis of a nonlinear fluid inerter-based hydro-pneumatic suspension. Int. J. Struct. Stab. Dyn. 2024, 2650079. [Google Scholar] [CrossRef]
- John, E.D.A.; Wagg, D.J. Design and testing of a frictionless mechanical inerter device using living-hinges. J. Frankl. Inst. 2019, 356, 7650–7668. [Google Scholar] [CrossRef]
- Li, Y.; Hu, N.; Cheng, Z.; Zhang, L.; Yang, Y. Dynamic-breakdown of the ball-screw inerter in ISD system. Appl. Sci. 2023, 13, 2168. [Google Scholar] [CrossRef]
- Liu, X.; Jiang, J.Z.; Harrison, A.; Na, X. Truck suspension incorporating inerters to minimise road damage. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 2693–2705. [Google Scholar] [CrossRef]
- Li, X.; Li, F.; Shang, D. Dynamic characteristics analysis of ISD suspension system under different working conditions. Mathematics 2021, 9, 1345. [Google Scholar] [CrossRef]
- Shen, Y.J.; Li, Z.W.; Tian, X.; Ji, K.; Yang, X.F. Vibration suppression of the vehicle mechatronic ISD suspension using the fractional-order biquadratic electrical network. Fractal Fract. 2025, 9, 106. [Google Scholar] [CrossRef]
- Jiang, J.Z.; Smith, M.C. Series-parallel six-element synthesis of biquadratic impedances. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 59, 2543–2554. [Google Scholar] [CrossRef]
- Jiang, J.Z.; Smith, M.C. Regular positive-real functions and five-element network synthesis for electrical and mechanical networks. IEEE Trans. Autom. Control 2010, 56, 1275–1290. [Google Scholar] [CrossRef]
- Wang, K. Implementation of Biquadratic Function in Passive Network Synthesis. Master’s Thesis, Nanjing University of Science and Technology, Nanjing, China, 2013. [Google Scholar]
- Hu, Y.; Chen, M.Z. Low-complexity passive vehicle suspension design based on element-number-restricted networks and low-order admittance networks. J. Dyn. Syst. Meas. Control 2018, 140, 101014. [Google Scholar] [CrossRef]
- Zhang, S.Y.; Jiang, J.Z.; Wang, H.L.; Neild, S. Synthesis of essential-regular bicubic impedances. Int. J. Circuit Theory Appl. 2017, 45, 1482–1496. [Google Scholar] [CrossRef]
- Wang, K.; Chen, M.Z.Q.; Liu, F. Series-parallel mechanical circuit synthesis of a positive-real third-order admittance using at most six passive elements for inerter-based control. J. Frankl. Inst. 2023, 360, 5442–5480. [Google Scholar] [CrossRef]
- Wang, K.; Chen, M.Z.Q. Passive mechanical realizations of bicubic impedances with no more than five elements for inerter-based control design. J. Frankl. Inst. 2021, 358, 5353–5385. [Google Scholar] [CrossRef]
- Naik, P.A.; Yavuz, M.; Qureshi, S.; Owolabi, K.M.; Soomro, A.; Ganie, A.H. Memory impacts in hepatitis C: A global analysis of a fractional-order model with an effective treatment. Comput. Methods Programs Biomed. 2024, 254, 108306. [Google Scholar] [CrossRef]
- Gutierrez, R.E.; Rosário, J.M.; Machado, J.T. Fractional order calculus: Basic concepts and engineering applications. Math. Probl. Eng. 2010, 2010, 375858. [Google Scholar] [CrossRef]
- Chen, E.; Xing, W.C.; Wang, M.; Ma, W.; Chang, Y. Study on chaos of nonlinear suspension system with fractional-order derivative under random excitation. Chaos Solit. Fractals 2021, 152, 111300. [Google Scholar] [CrossRef]
- Ahmad, S.; Ullah, A.; Al-Mdallal, Q.M.; Khan, H.; Shah, K.; Khan, A. Fractional order mathematical modeling of COVID-19 transmission. Chaos Solit. Fractals 2020, 139, 110256. [Google Scholar] [CrossRef]
- Lazarus, N.; Meyer, C.D.; Bedair, S.S. Fractal inductors. IEEE Trans. Magn. 2013, 50, 1–8. [Google Scholar] [CrossRef]
- Sidhardh, S.; Patnaik, S.; Semperlotti, F. Fractional-order structural stability: Formulation and application to the critical load of nonlocal slender structures. Int. J. Mech. Sci. 2021, 201, 106443. [Google Scholar] [CrossRef]
- Chen, Y.; Xu, J.; Tai, Y.; Xu, X.; Chen, N. Critical damping design method of vibration isolation system with both fractional-order inerter and damper. Mech. Adv. Mater. Struct. 2022, 29, 1348–1359. [Google Scholar] [CrossRef]
- Chen, B.S.; Li, C.Y.; Wilson, B.; Huang, Y.J. Fractional modeling and analysis of coupled MR damping system. IEEE/CAA J. Autom. Sin. 2016, 3, 288–294. [Google Scholar] [CrossRef]
- Lin, D.; Liao, X.Z.; Dong, L.; Yang, R.C. Experimental study of fractional-order RC circuit model using the Caputo and Caputo-Fabrizio derivatives. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 1034–1044. [Google Scholar] [CrossRef]
- Jin, T.; Xia, H.X.; Deng, W.; Li, Y.G.; Chen, H. Uncertain fractional-order multi-objective optimization based on reliability analysis and application to fractional-order circuit with caputo type. Circuits Syst. Signal Process. 2021, 40, 5955–5982. [Google Scholar] [CrossRef]
- Hua, J.; Shen, Y.S.; Yang, X.F.; Zhang, Y.; Liu, Y. Optimal design of fractional-order electrical network for vehicle mechatronic ISD suspension using the structure-immittance approach. World Electr. Veh. J. 2023, 14, 12. [Google Scholar] [CrossRef]
- Guo, Z.; Wang, M.; Wu, J.; Tao, F.; Chen, Q.; Wang, Q.; Ouyang, Q.; Shi, J.; Zou, X. Quantitative assessment of zearalenone in maize using multivariate algorithms coupled to Raman spectroscopy. Food Chem. 2019, 286, 282–288. [Google Scholar] [CrossRef]
- Tang, N.; Sun, J.; Yao, K.; Zhou, X.; Tian, Y.; Cao, Y.; Nirere, A. Identification of Lycium barbarum varieties based on hyperspectral imaging technique and competitive adaptive reweighted sampling-whale optimization algorithm-support vector machine. J. Food Process Eng. 2021, 44, e13603. [Google Scholar] [CrossRef]
- Li, Y.; Sun, J.; Wu, X.; Lu, B.; Wu, M.; Dai, C. Grade identification of tieguanyin tea using fluorescence hyperspectra and different statistical algorithms. J. Food Sci. 2019, 84, 2234–2241. [Google Scholar] [CrossRef]
- Kutsanedzie, F.Y.; Chen, Q.; Hassan, M.M.; Yang, M.; Sun, H.; Rahman, M.H. Near infrared system coupled chemometric algorithms for enumeration of total fungi count in cocoa beans neat solution. Food Chem. 2018, 240, 231–238. [Google Scholar] [CrossRef]
- Shen, Y.J.; Hua, J.; Fan, W.; Liu, Y.L.; Yang, X.F.; Chen, L. Optimal design and dynamic performance analysis of a fractional-order electrical network-based vehicle mechatronic ISD suspension. Mech. Syst. Signal Process. 2023, 184, 109718. [Google Scholar] [CrossRef]








| Parameters | Values |
|---|---|
| Sprung mass, ms | 675/kg |
| Unsprung mass, mu | 62.5/kg |
| Tire stiffness, kt | 290,000/N∙m−1 |
| Spring stiffness, k | 53,100/N∙m−1 |
| Damper coefficient, c | 1000/N∙s∙m−1 |
| Inertance, b | 10/kg |
| A | 0.21 |
| B | 3.70 |
| C | 0.01 |
| D | 0.20 |
| F | 0.52 |
| G | 2.88 |
| H | 49.13 |
| Resistance, R1 | 4.69/Ω |
| Resistance, R2 | 0.15/Ω |
| Resistance, R3 | 246.86/Ω |
| Fractional-order capacitance, | 0.08/F |
| Fractional order of capacitance, α2 | 0.82 |
| Fractional-order inductance, | 0.28/H |
| Fractional order of inductance, β2 | 0.88 |
| Parameters | Values |
|---|---|
| Resistance R4 | 0.00028/Ω |
| Resistance R5 | 17.55/Ω |
| Resistance R6 | 3587.08/Ω |
| Capacitance C1 | 0.107/F |
| Capacitance C2 | 0.043/F |
| Parameters | Values |
|---|---|
| Resistance R7 | 0.00064/Ω |
| Resistance R8 | 0.50/Ω |
| Resistance R9 | 121.73/Ω |
| Inductance L1 | 0.33/H |
| Inductance L2 | 0.42/H |
| FO-ISD Suspension | I-O Approximation ISD Suspension | Error | |
|---|---|---|---|
| RMS of Vehicle Body Acceleration/(m·s−2) | 1.1632 | 1.1745 | 0.97% |
| RMS of Suspension Working Space/(m) | 0.0091 | 0.0098 | 7.69% |
| RMS of Dynamic Tire Load/(N) | 1155.9 | 1160.7 | 0.42% |
| FO-ISD Suspension | I-O Approximation ISD Suspension | Error | ||
|---|---|---|---|---|
| The Gain of the Vehicle Body Acceleration/[(m·s−2)/m] | LF | 161 | 180 | 11.80% |
| HF | 429 | 430 | 0.23% | |
| The Gain of the Suspension Working Space | LF | 1.36 | 1.46 | 7.35% |
| HF | 1.56 | 1.58 | 1.28% | |
| The Gain of the Dynamic Tire Load/(kN/m) | LF | 109 | 110 | 0.92% |
| HF | 550 | 551 | 0.18% |
| FO-ISD Suspension | I-O Approximation ISD Suspension | Error | |
|---|---|---|---|
| PTP value of the vehicle body acceleration/(m·s−2) | 12.8691 | 12.8370 | −0.25% |
| PTP value of the suspension working space/(m) | 0.0416 | 0.0417 | 0.24% |
| PTP value of the dynamic tire load/(kN) | 21.314 | 21.304 | −0.05% |
| Suspension | Velocity u/(m/s) | RMS of Vehicle Body Acceleration/(m·s−2) | RMS of Suspension Working Space/(m) | RMS of Dynamic Tire Load/(N) |
|---|---|---|---|---|
| Traditional Passive Suspension (Experiment) | 10 | 0.9062 | 0.0081 | 844.0 |
| 20 | 1.2641 | 0.0112 | 1184.5 | |
| 30 | 1.5178 | 0.0133 | 1435.1 | |
| I-O Approximation ISD Suspension (Experiment) | 10 | 0.9500 | 0.0075 | 913.8 |
| 20 | 1.2900 | 0.0102 | 1301.9 | |
| 30 | 1.5700 | 0.0121 | 1576.4 | |
| Optimization (Experiment) | 10 | 8.65% | 17.26% | 2.60% |
| 20 | 7.86% | 17.45% | 2.26% | |
| 30 | 7.10% | 17.48% | 1.93% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, Y.; Qiu, D.; Xu, H.; Liu, Y.; Sun, K.; Yang, X.; Guo, Y. Implementation Method and Bench Testing of Fractional-Order Biquadratic Transfer Function-Based Mechatronic ISD Suspension. Sensors 2025, 25, 4255. https://doi.org/10.3390/s25144255
Shen Y, Qiu D, Xu H, Liu Y, Sun K, Yang X, Guo Y. Implementation Method and Bench Testing of Fractional-Order Biquadratic Transfer Function-Based Mechatronic ISD Suspension. Sensors. 2025; 25(14):4255. https://doi.org/10.3390/s25144255
Chicago/Turabian StyleShen, Yujie, Dongdong Qiu, Haolun Xu, Yanling Liu, Kecheng Sun, Xiaofeng Yang, and Yan Guo. 2025. "Implementation Method and Bench Testing of Fractional-Order Biquadratic Transfer Function-Based Mechatronic ISD Suspension" Sensors 25, no. 14: 4255. https://doi.org/10.3390/s25144255
APA StyleShen, Y., Qiu, D., Xu, H., Liu, Y., Sun, K., Yang, X., & Guo, Y. (2025). Implementation Method and Bench Testing of Fractional-Order Biquadratic Transfer Function-Based Mechatronic ISD Suspension. Sensors, 25(14), 4255. https://doi.org/10.3390/s25144255