
An Analysis of the Design and Kinematic Characteristics of an Octopedic Land–Air Bionic Robot



Abstract
1. Introduction
2. The Structural Design of an Octopedal Wheel-Legged Robot
2.1. Leg Mechanism Design Requirements
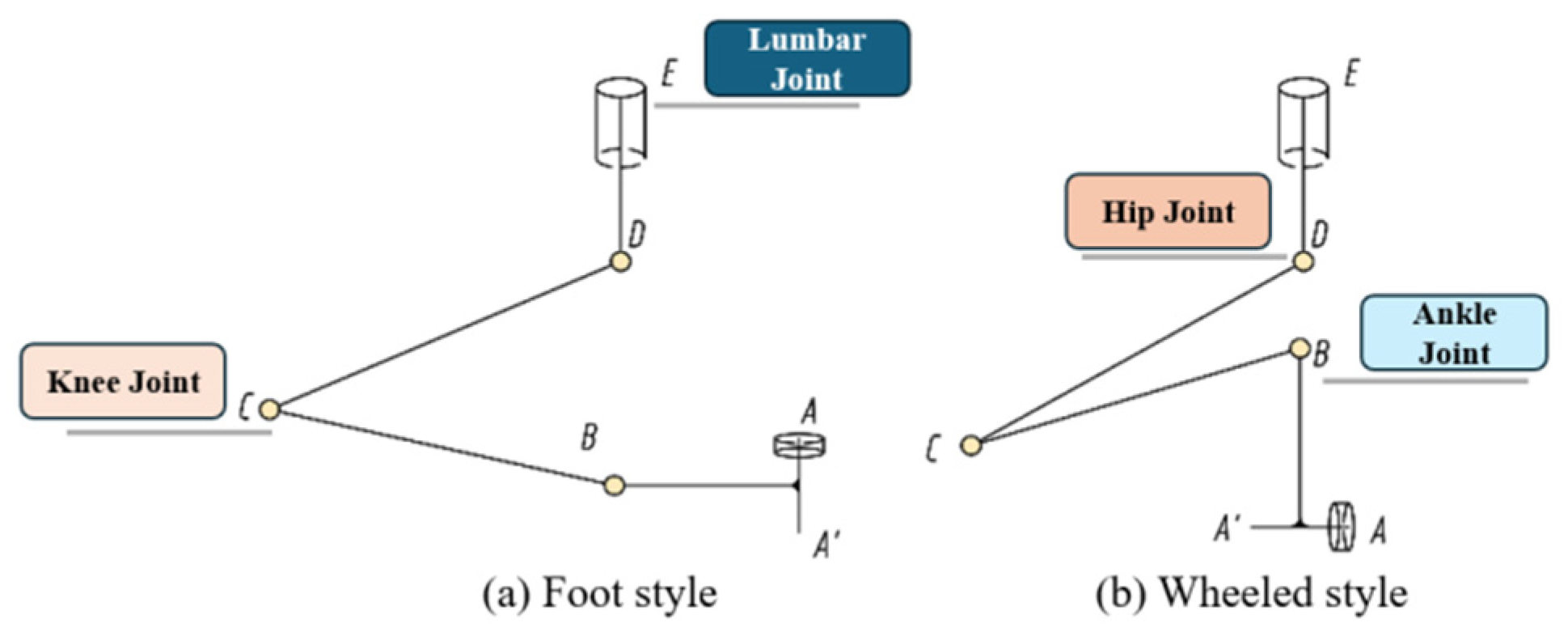
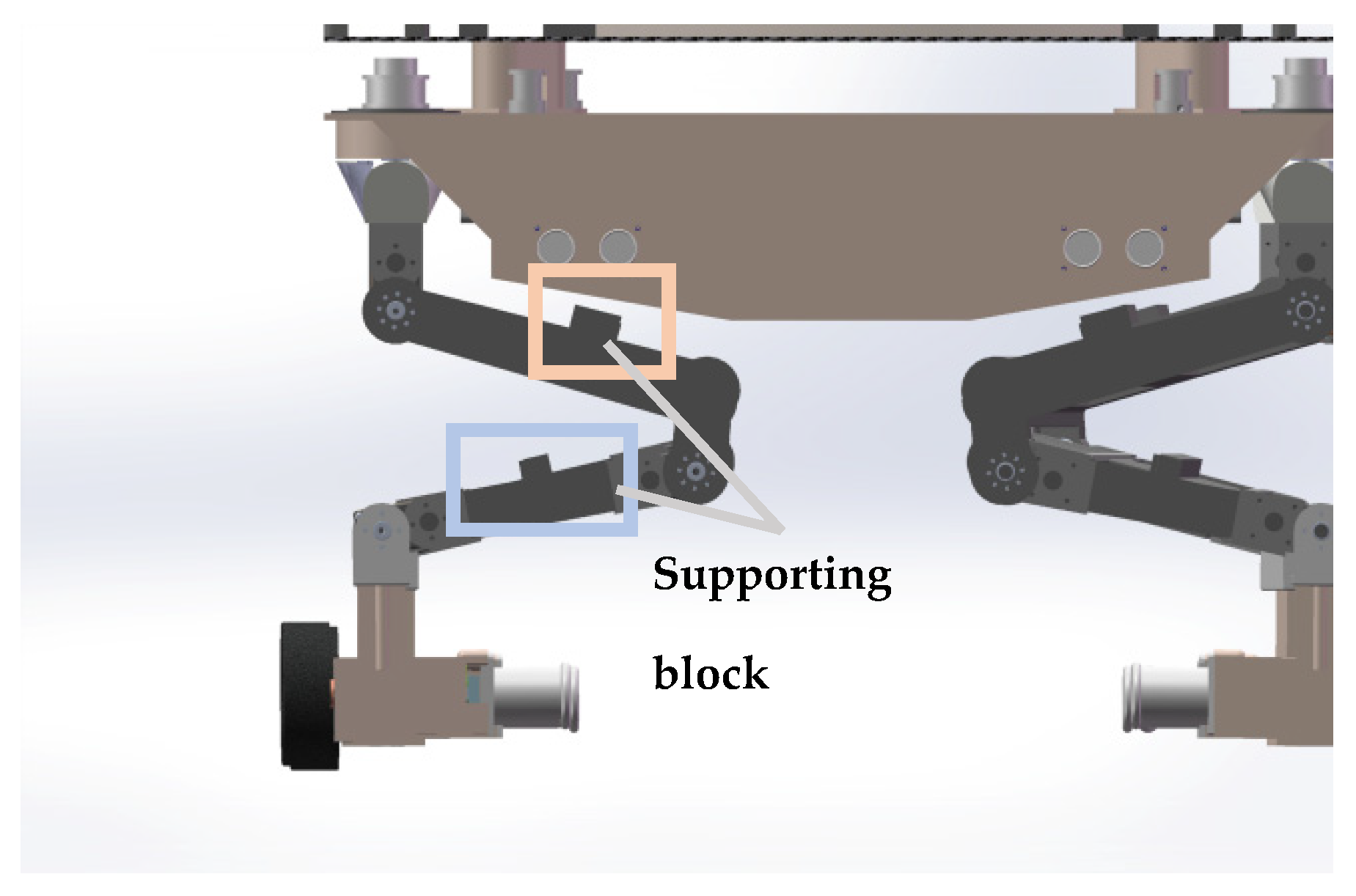
2.2. Leg Mechanism Design
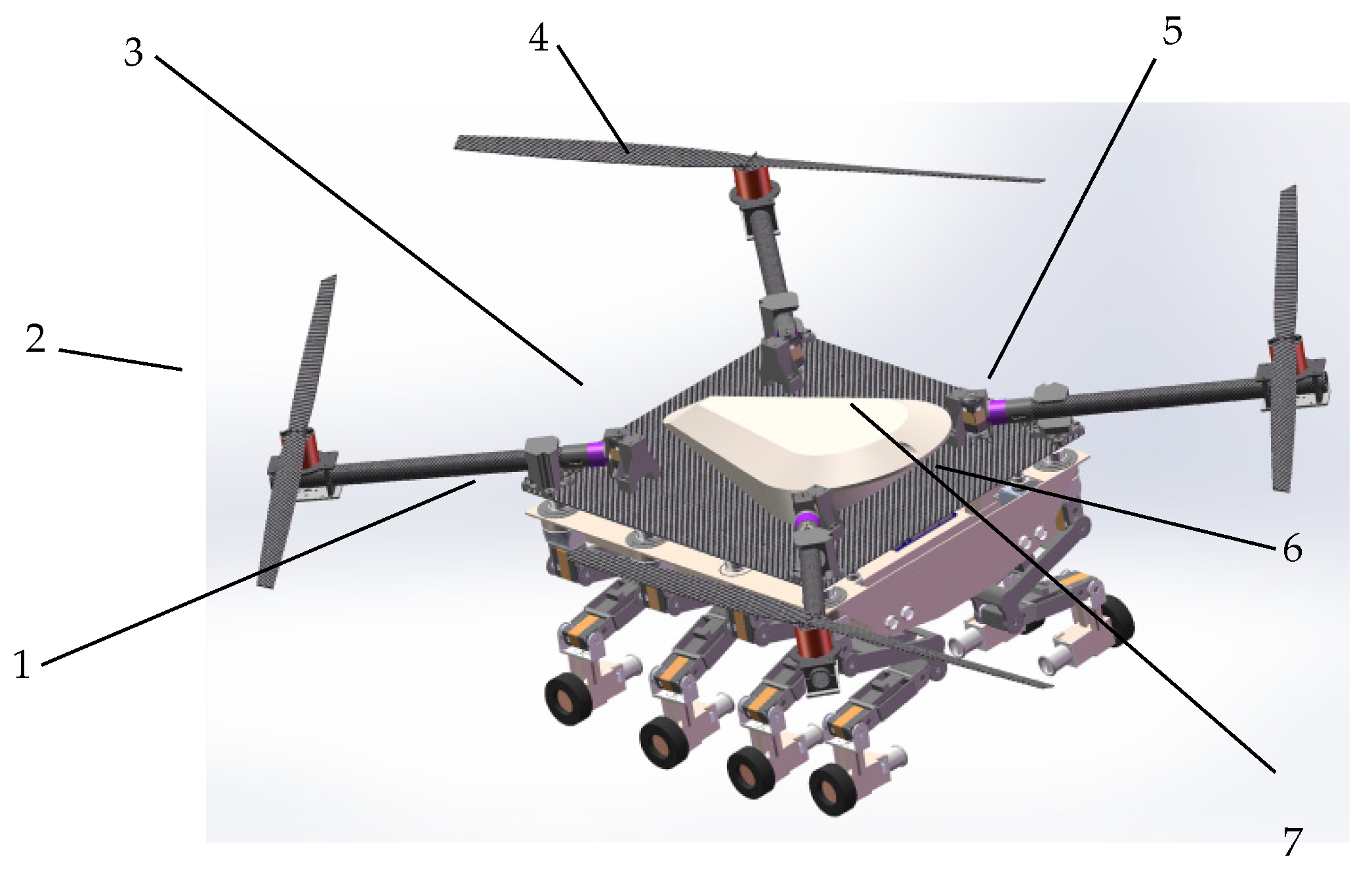
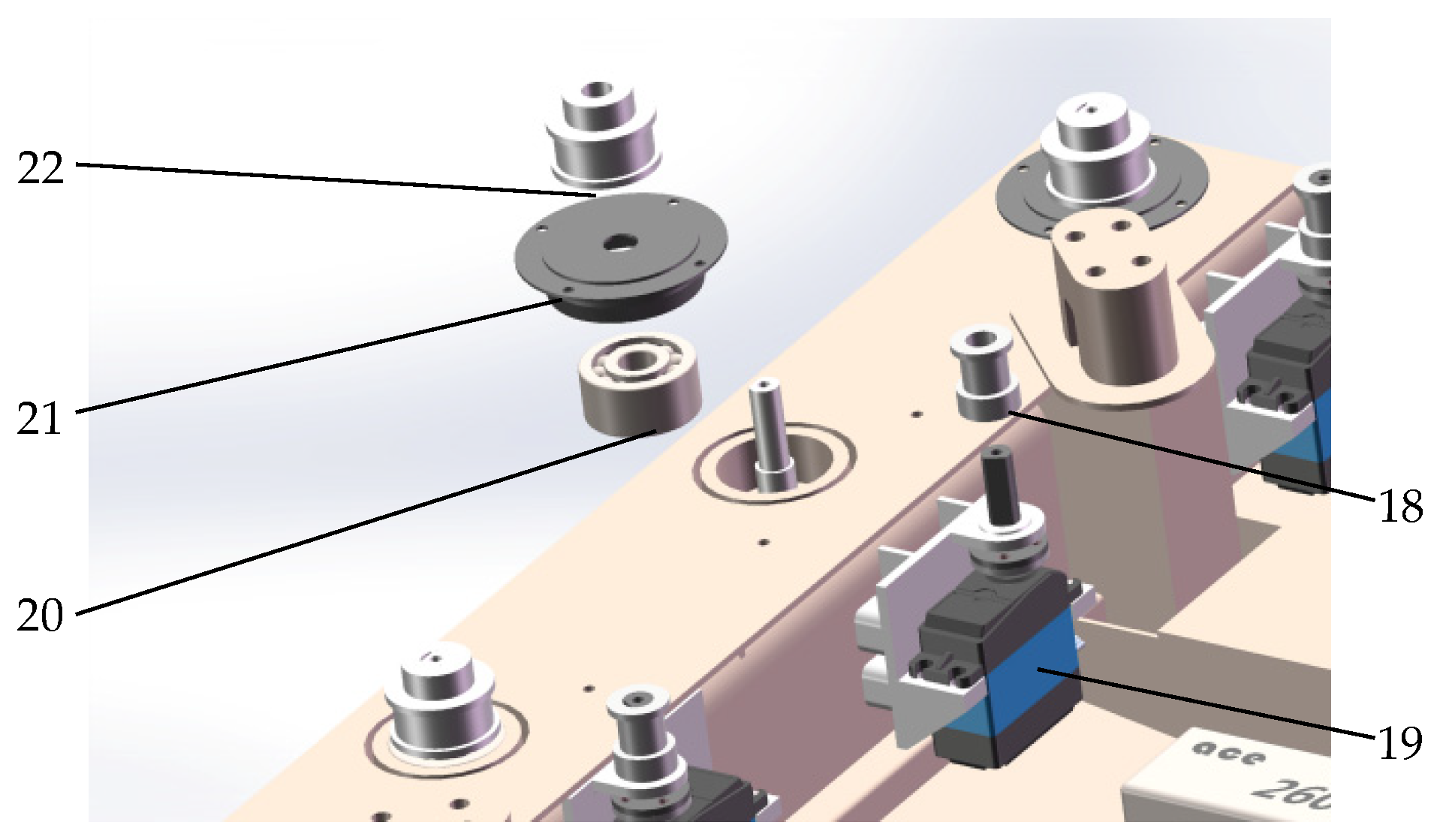
2.3. Overall 3D Modeling of the Robot
3. The Leg Mechanism of an Octopedal Wheeled-Legged Robot: A Core Research Analysis of Motion and Statics
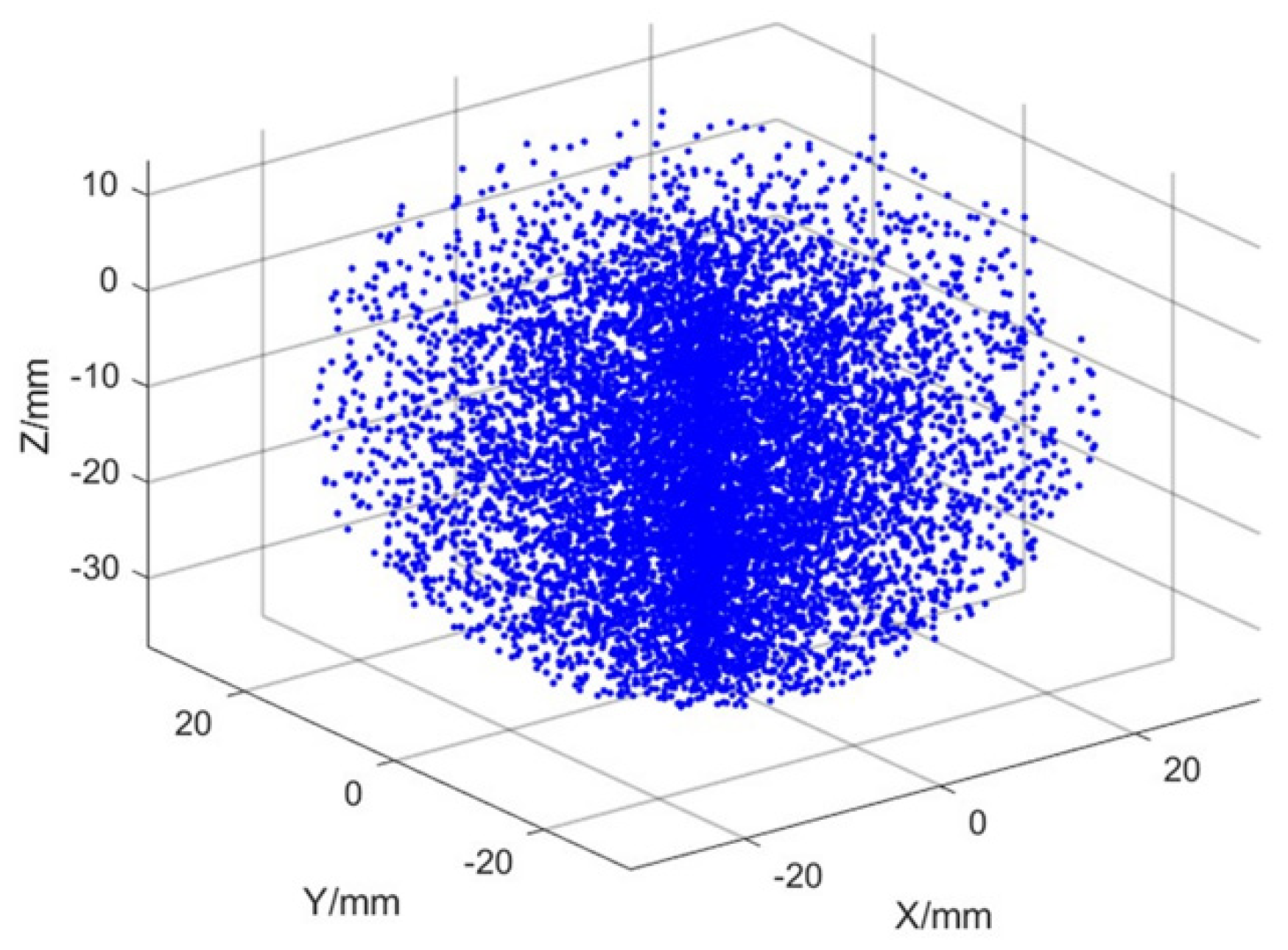
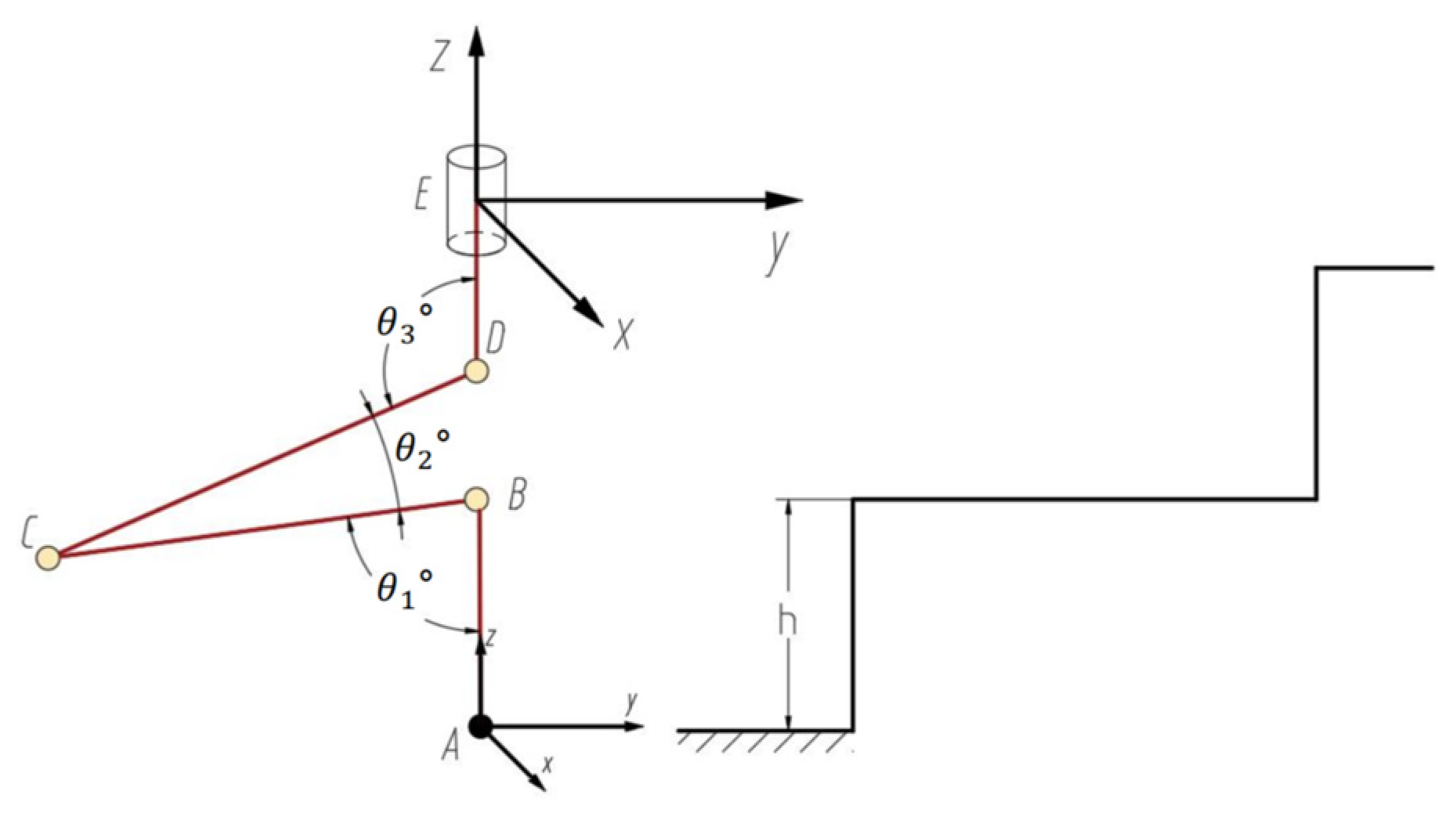
3.1. The Positional Analysis of the Leg Mechanism
3.2. Solving the Velocity Relation Matrix
4. Gait Strategies for Octopedal Wheel-Legged Robots
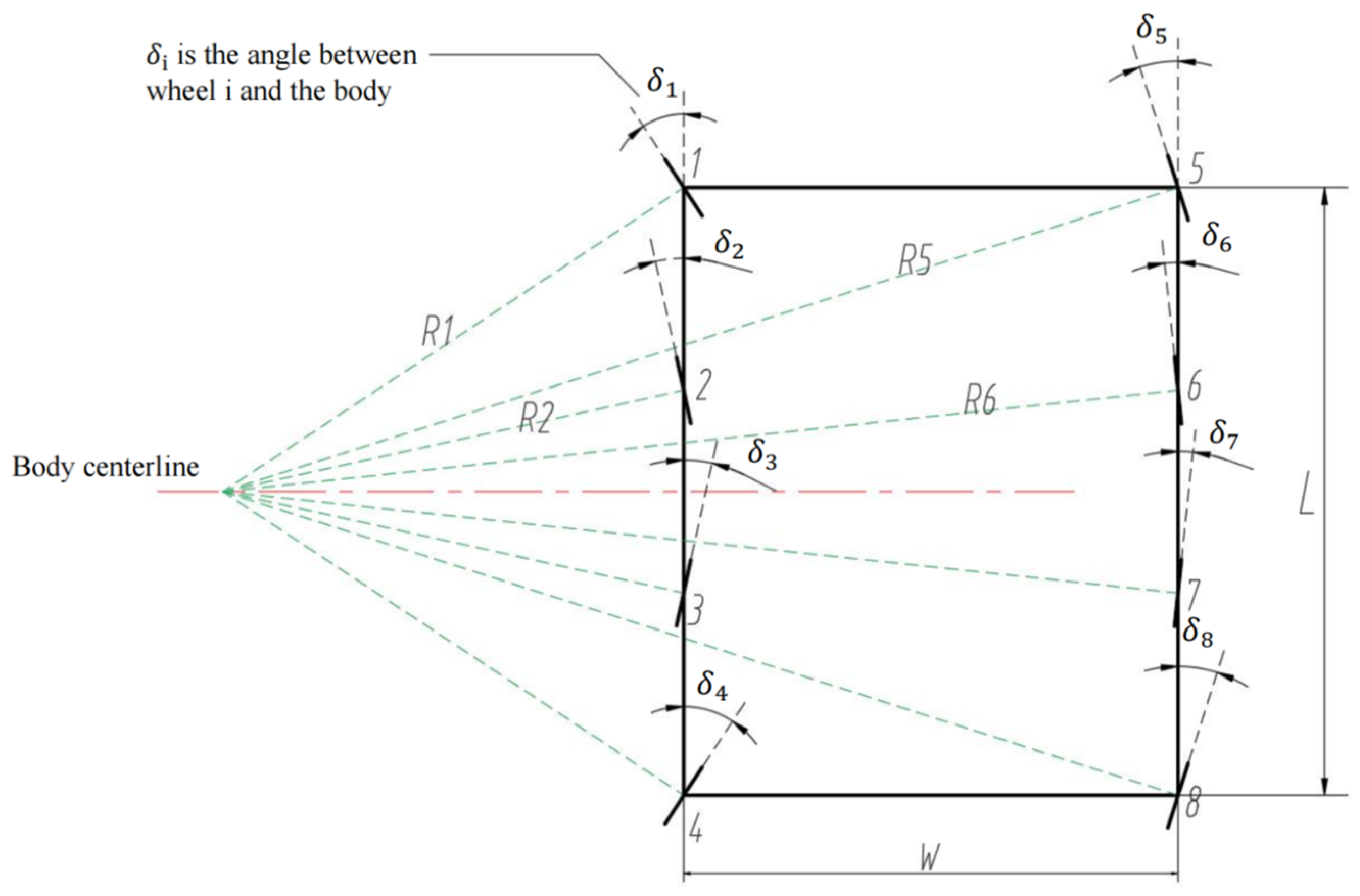
4.1. Wheeled Motion Mode
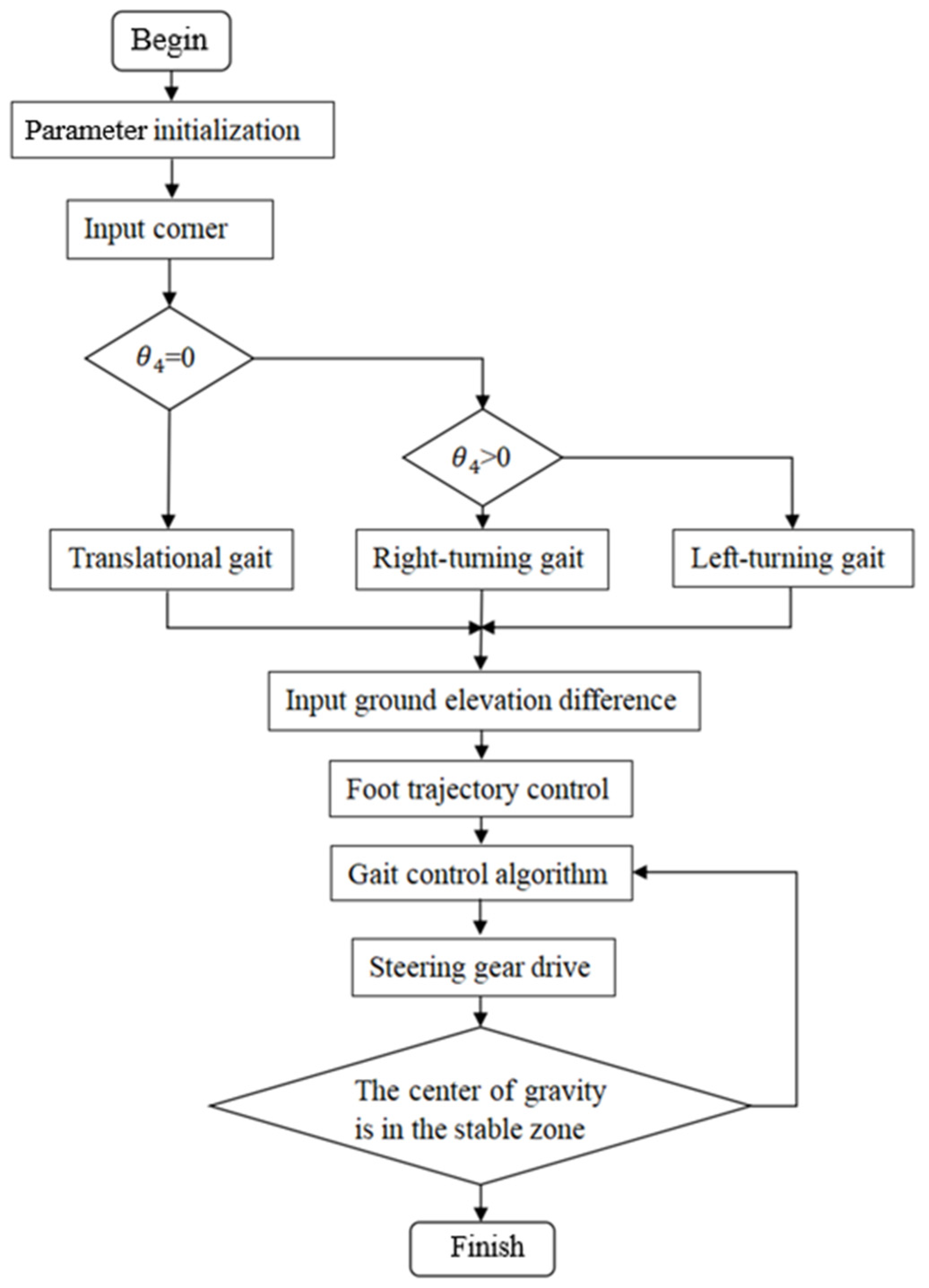
4.2. Wheel-Leg Motion Mode Switching Planning
- (1)
- Stability Assurance**: Flat surfaces provide stable support for the posture adjustment (e.g., lifting legs for wheel/foot-end switching), mitigating overturning risks on rough terrain;
- (2)
- Actuator Protection**: Joint movements during transitions experience more predictable loads on even ground, reducing the impact damage;
- (3)
- Energy Efficiency**: Eliminating the compensation for terrain irregularities simplifies the control and lowers the energy consumption;
- (4)
- Transition Buffer**: Switching to the walking mode on flat areas before entering rough terrain, or reverting to the wheeling mode after exiting, ensures an optimal configuration for environmental adaptation.
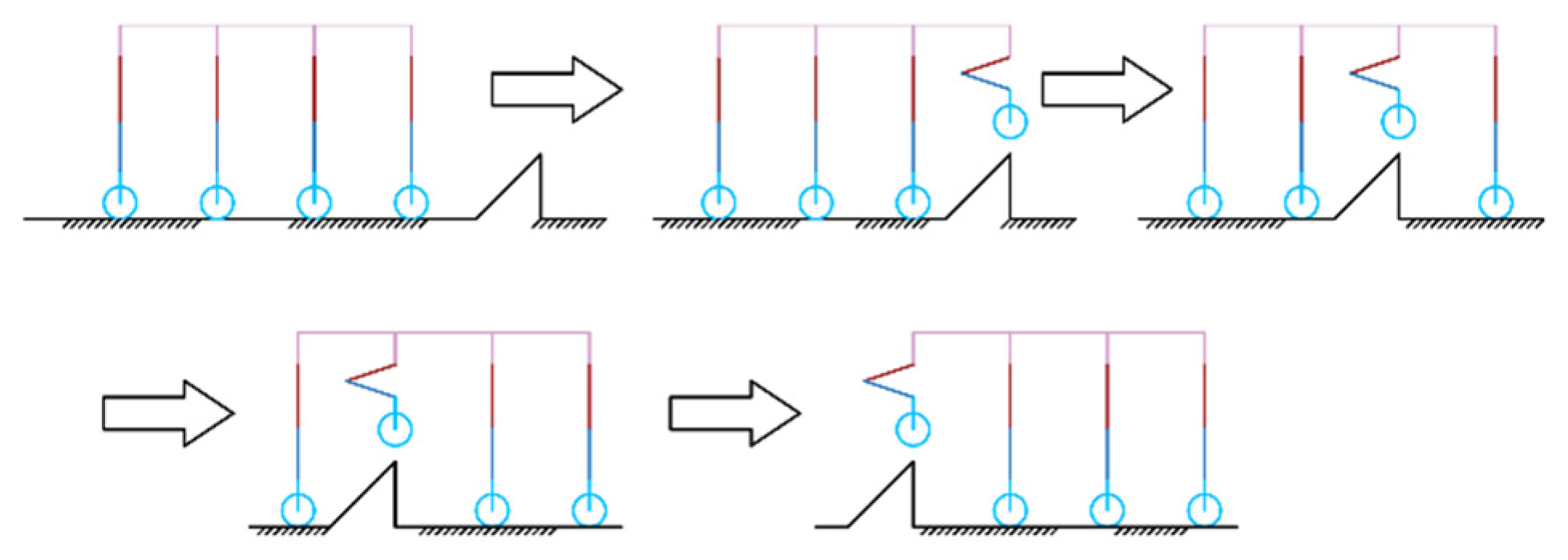
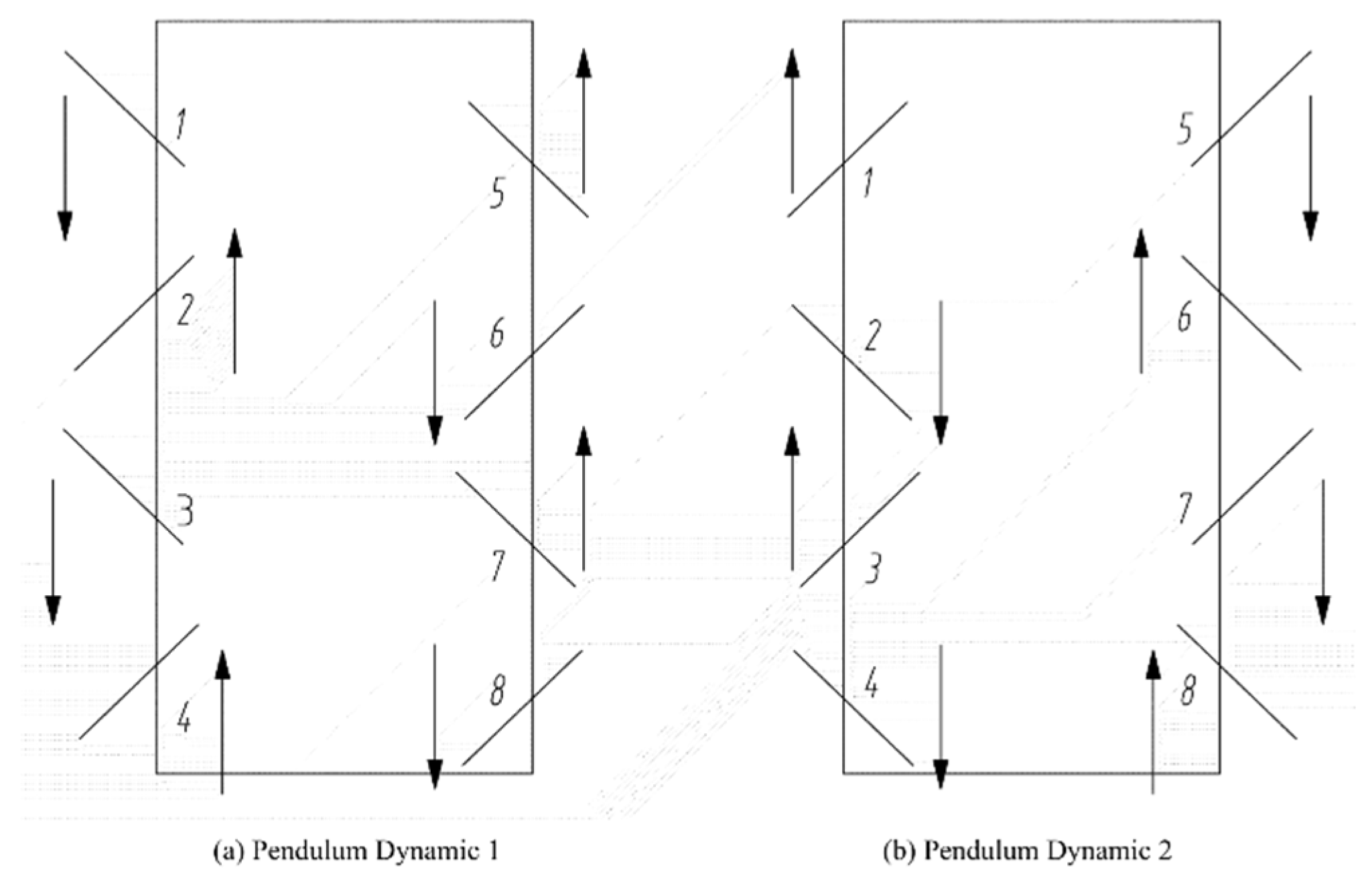
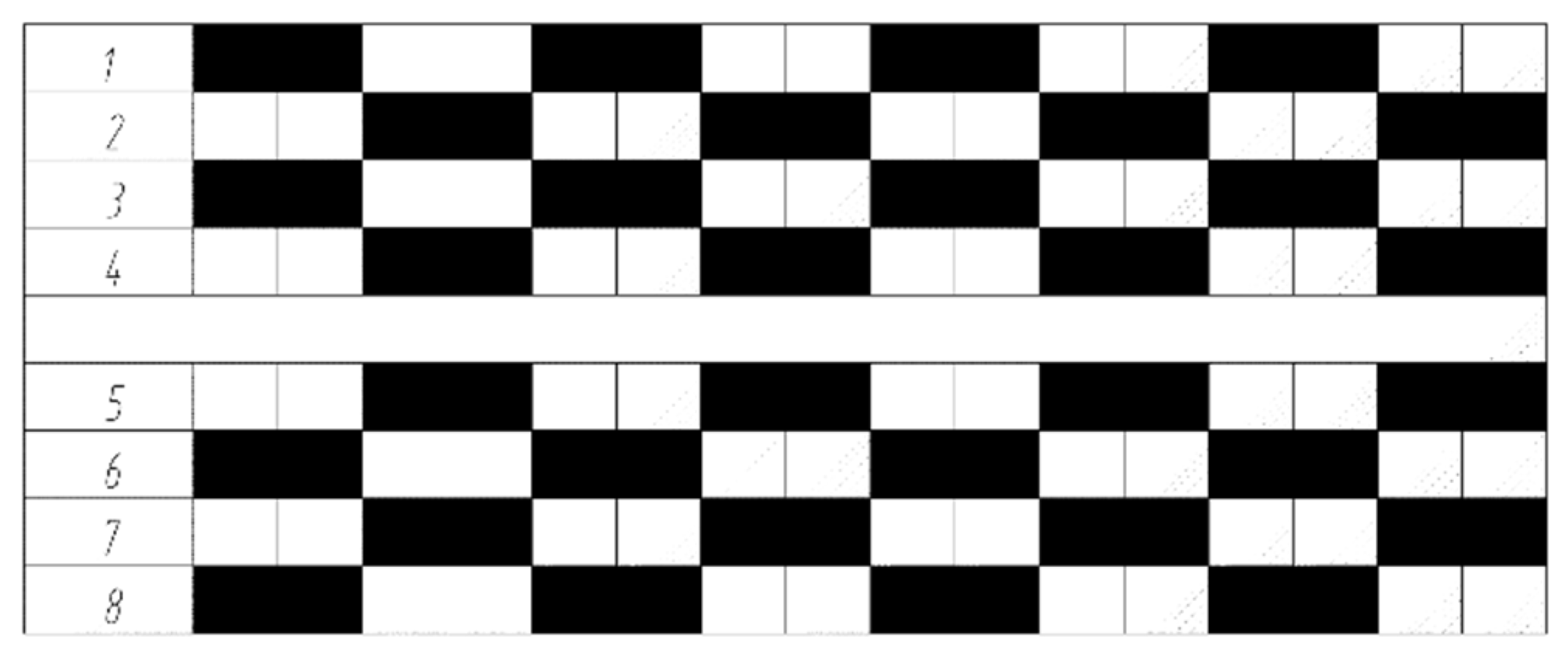
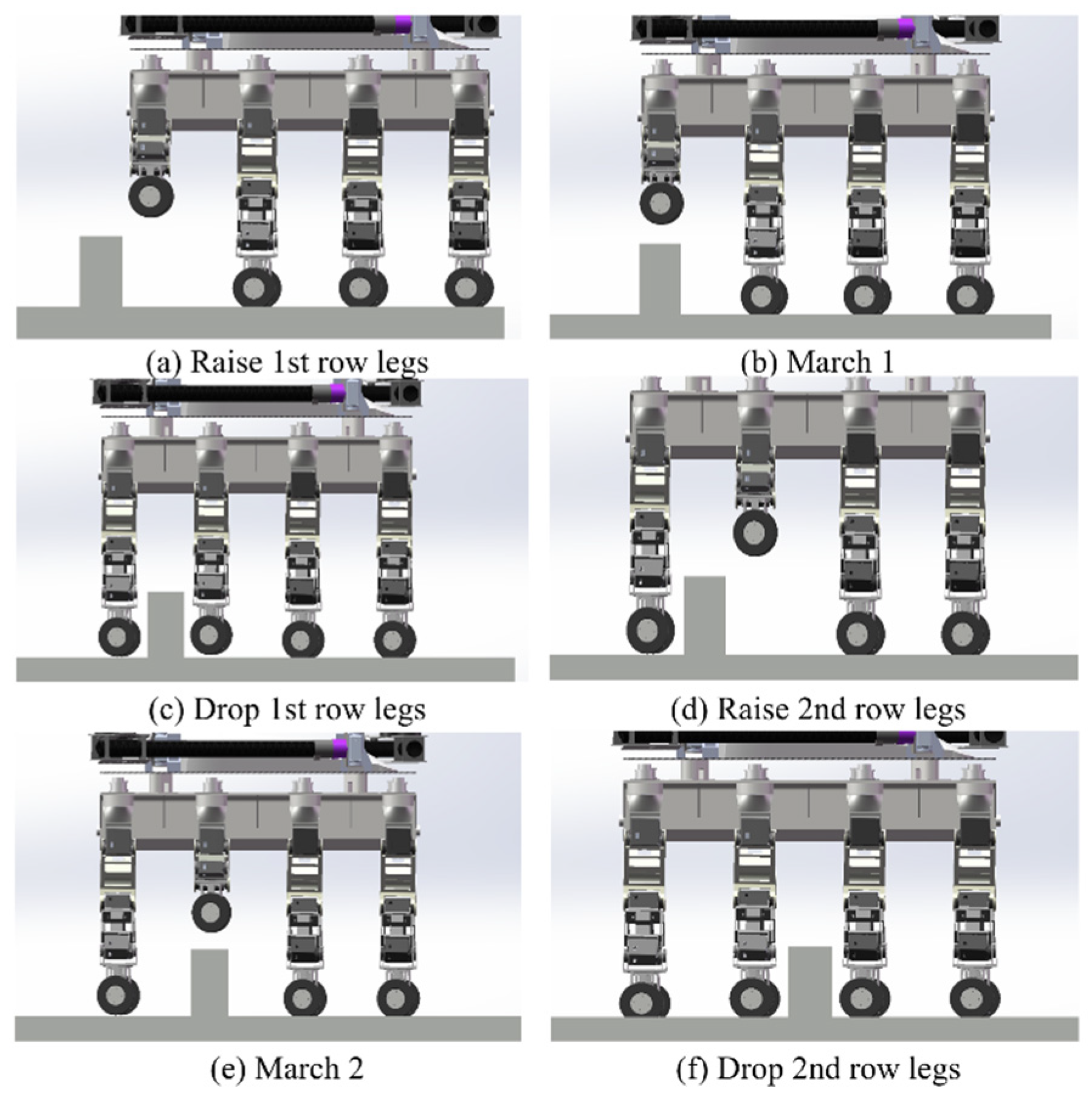
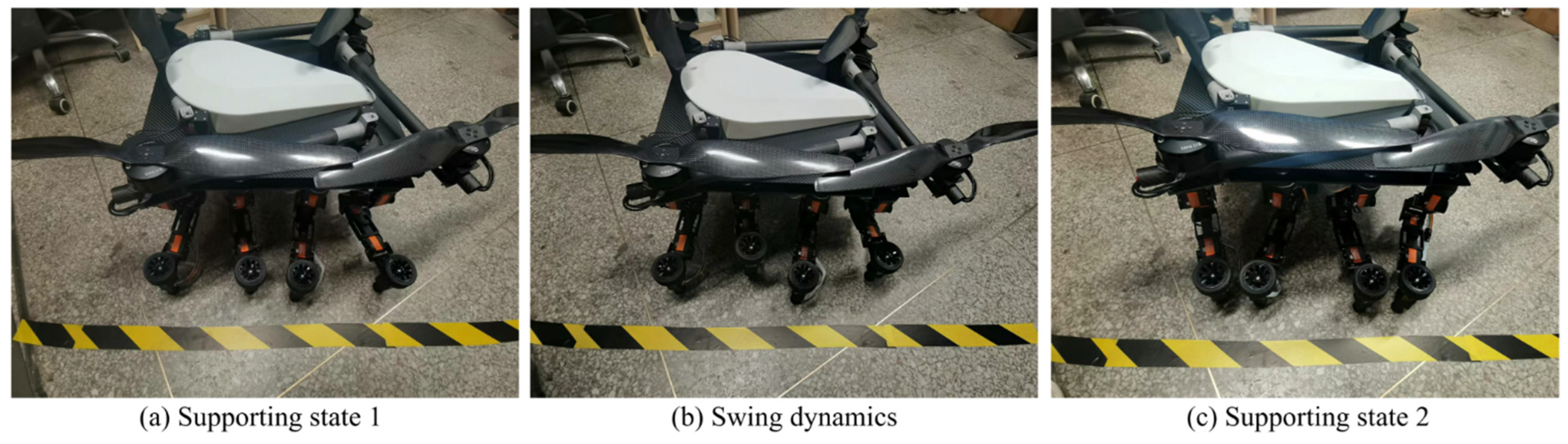
4.3. Foot Movement Patterns
5. Simulation and Experimental Verification
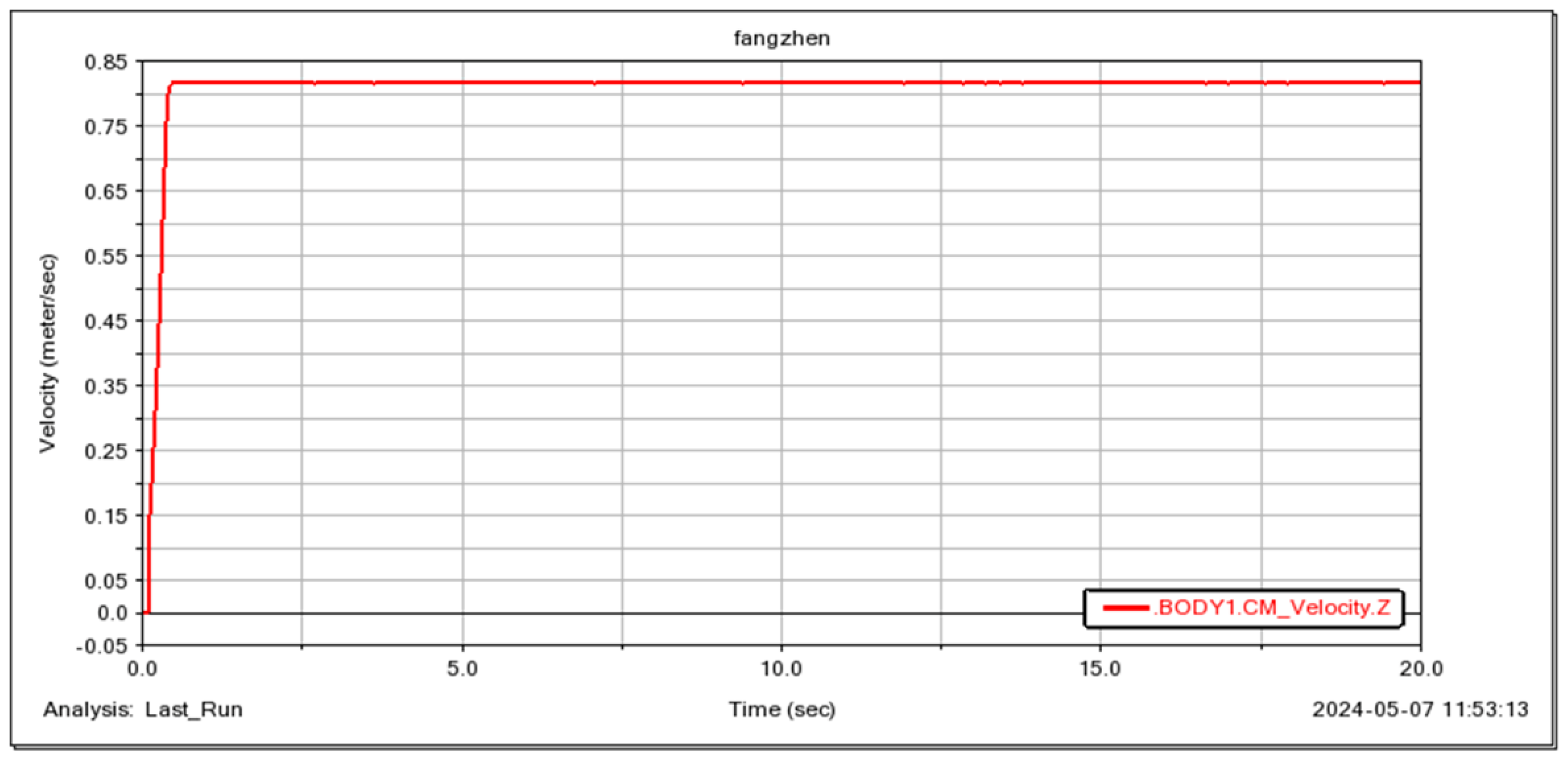
5.1. Simulation of Small Obstacle Movement on Flat Ground
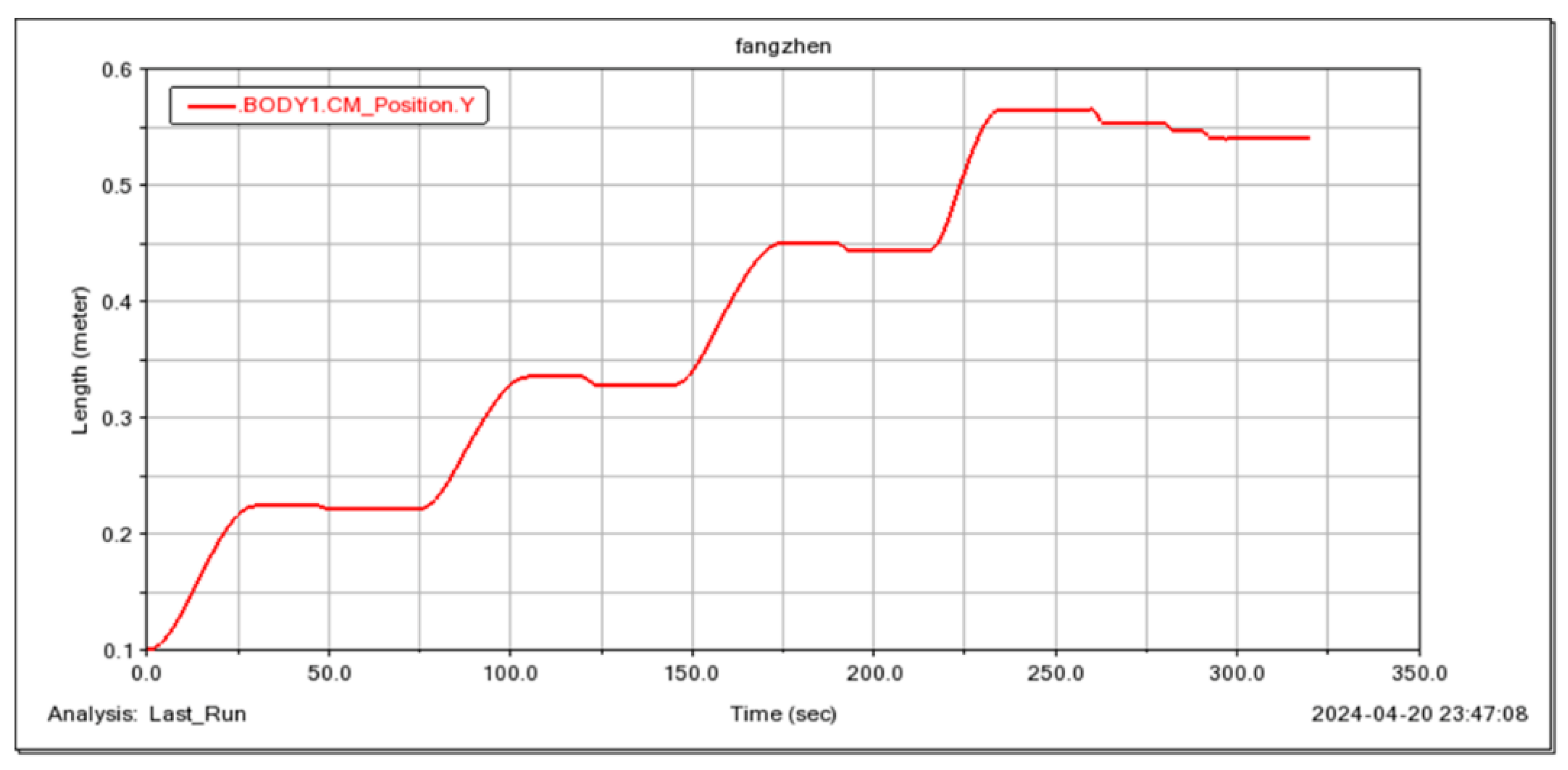
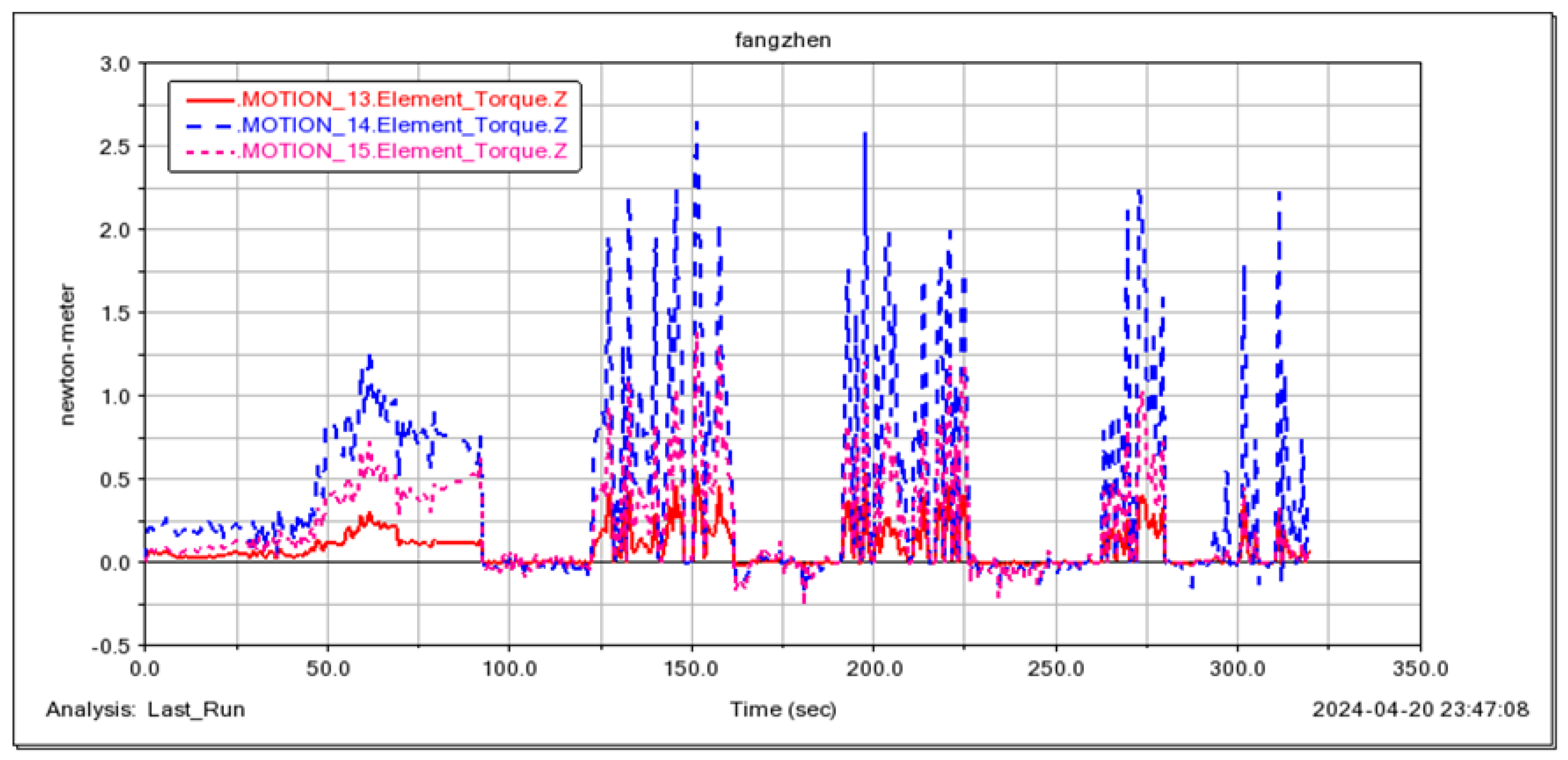
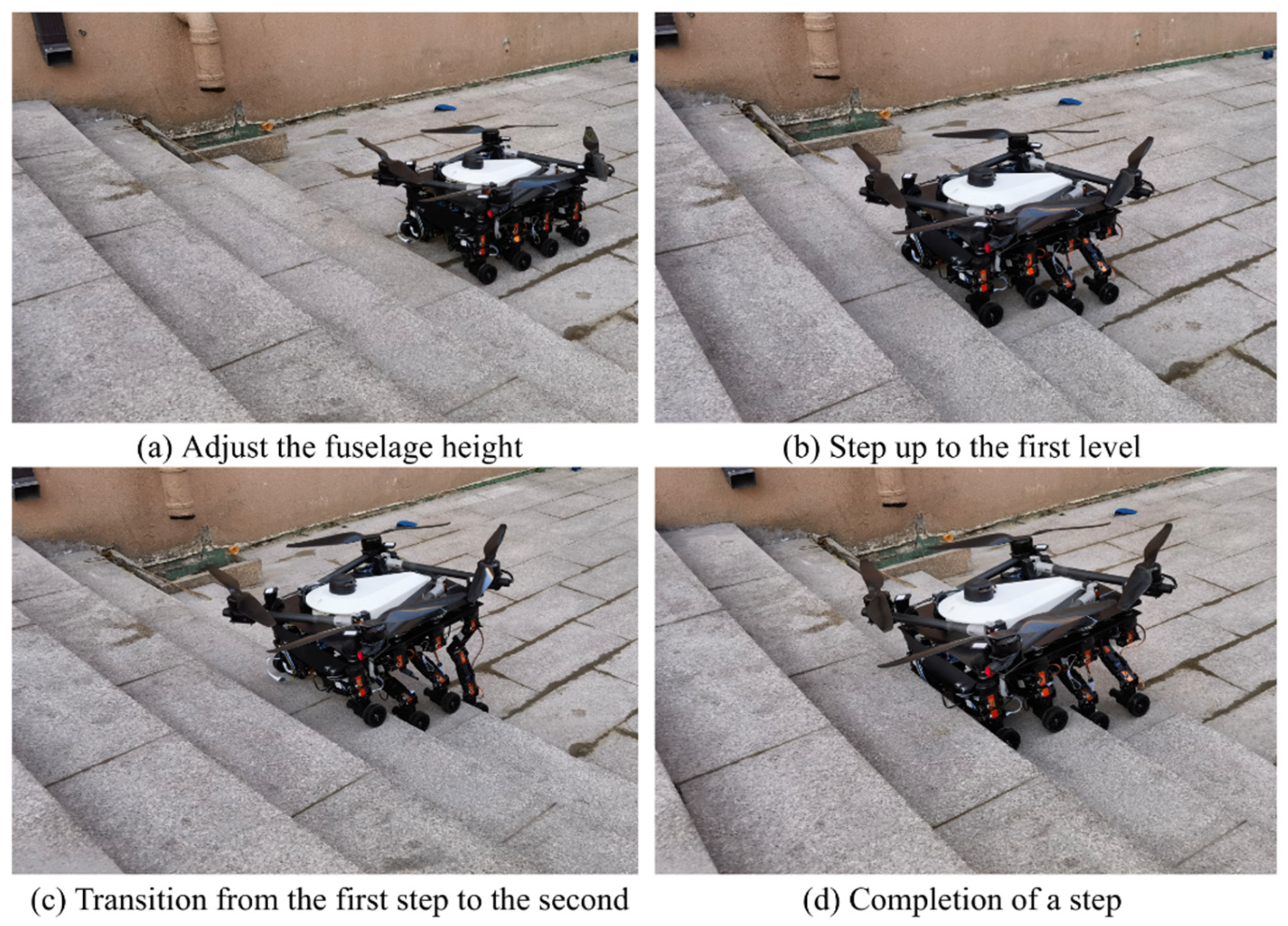
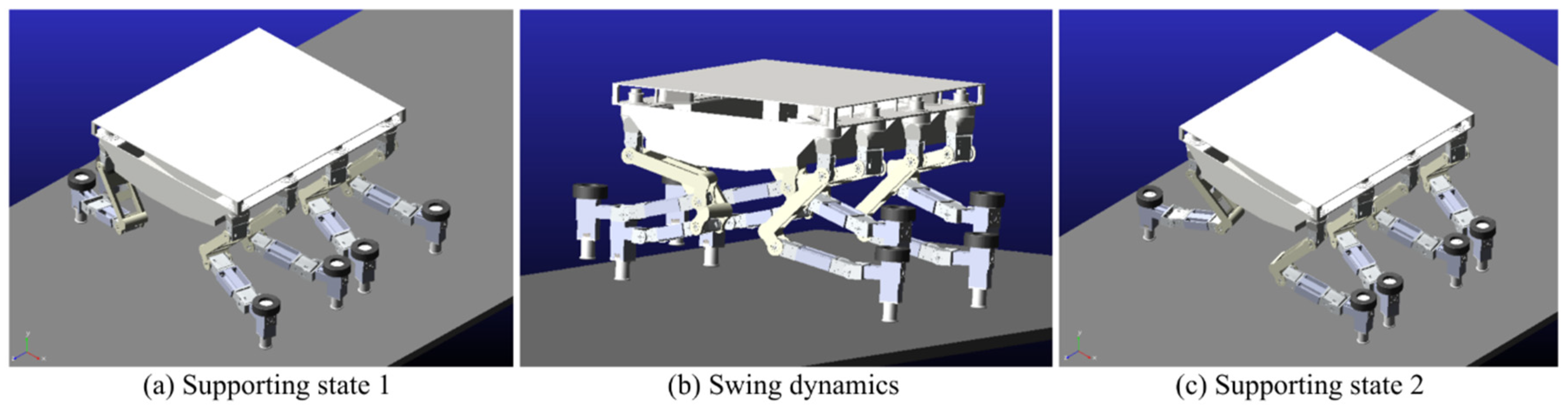
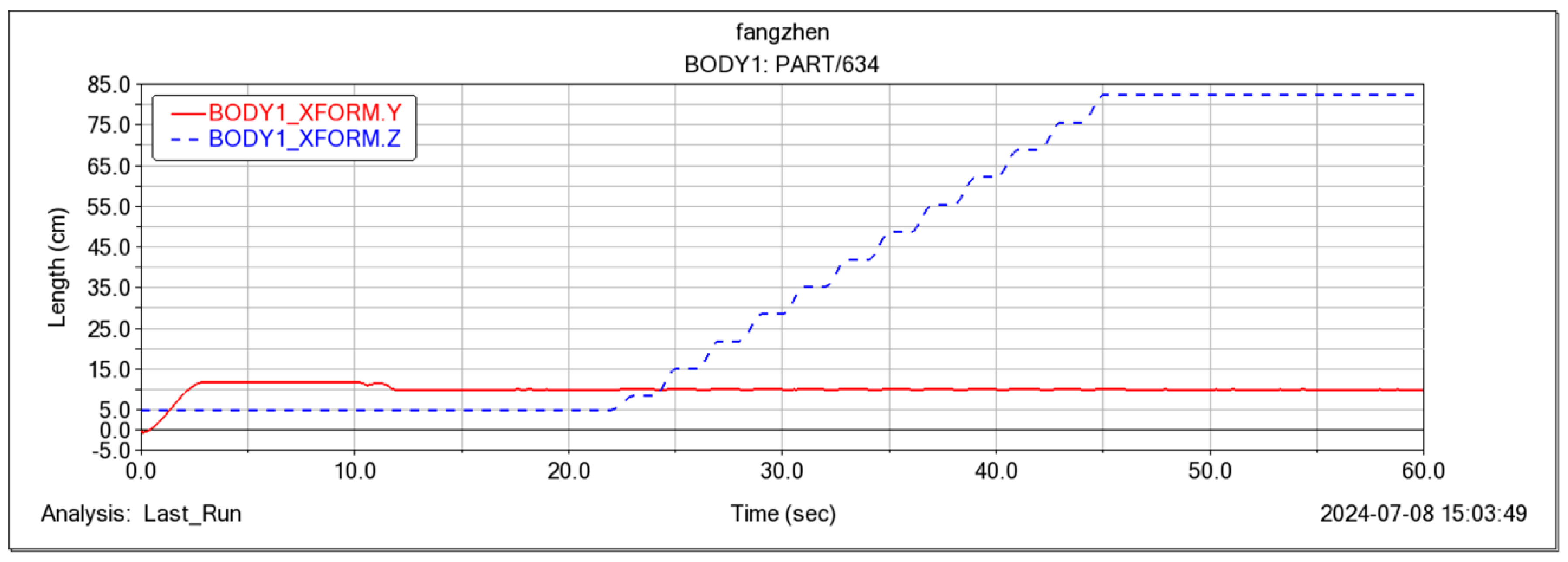
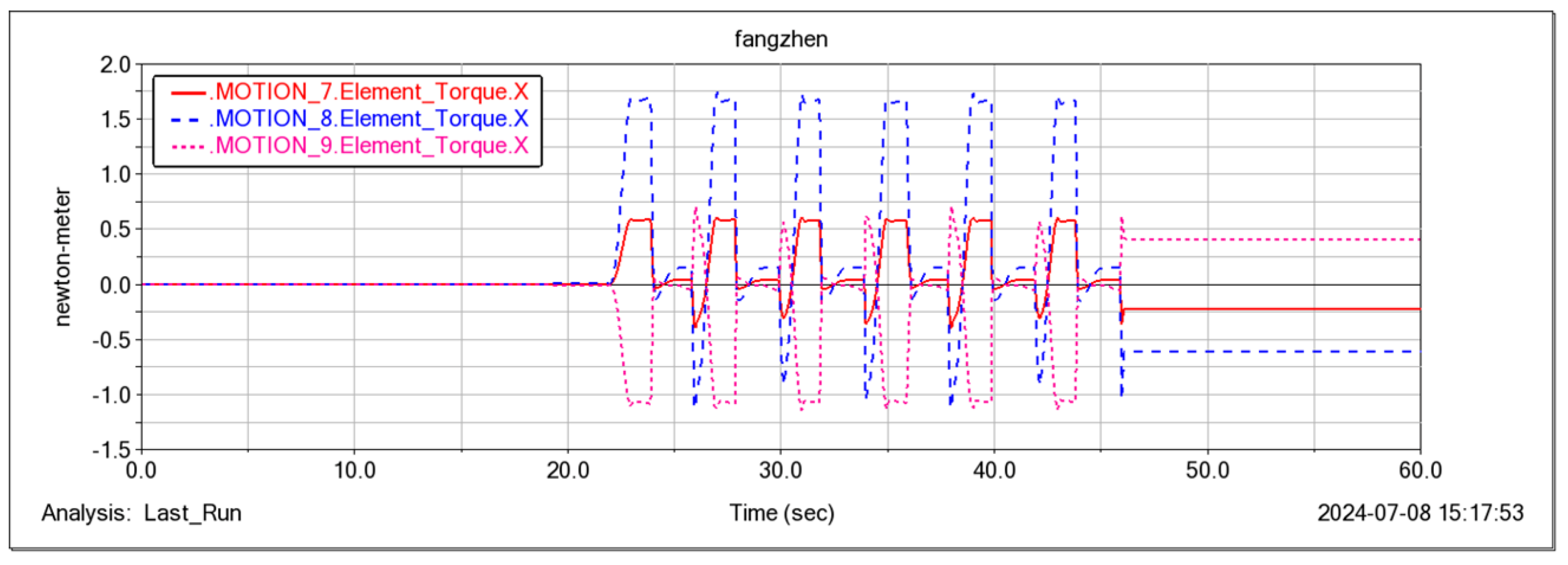
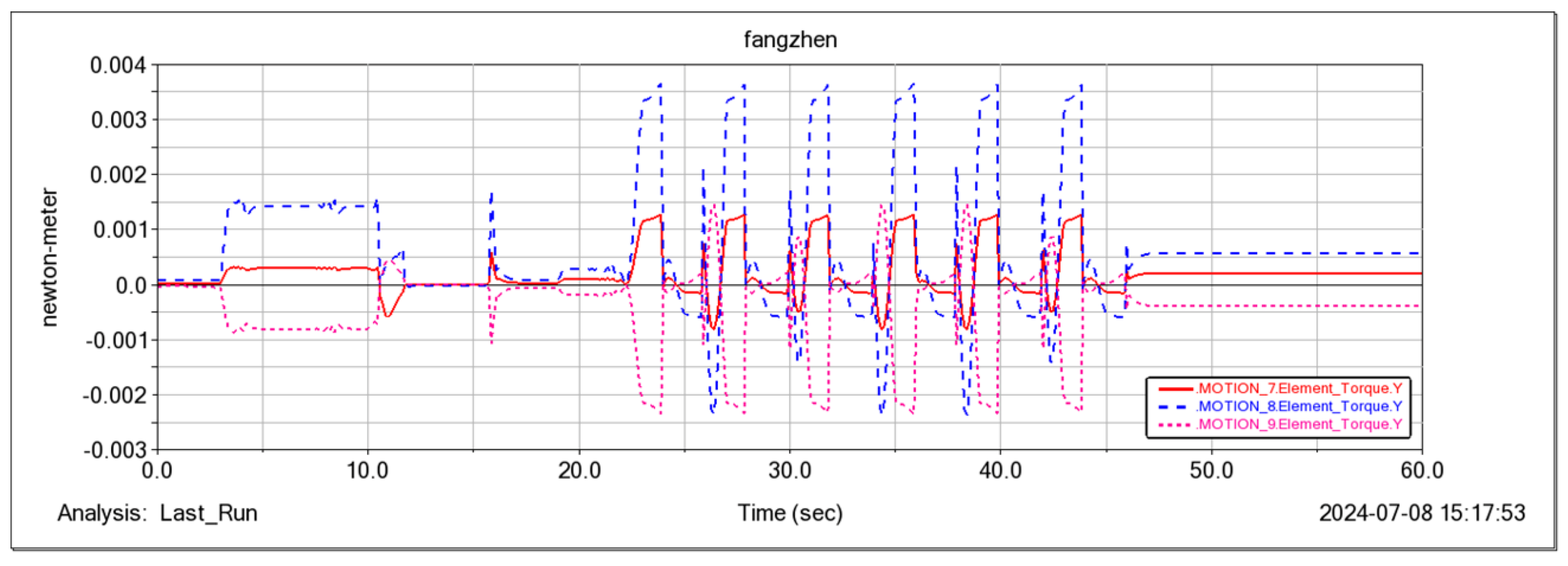
5.2. Going up the Steps
5.3. Footwork
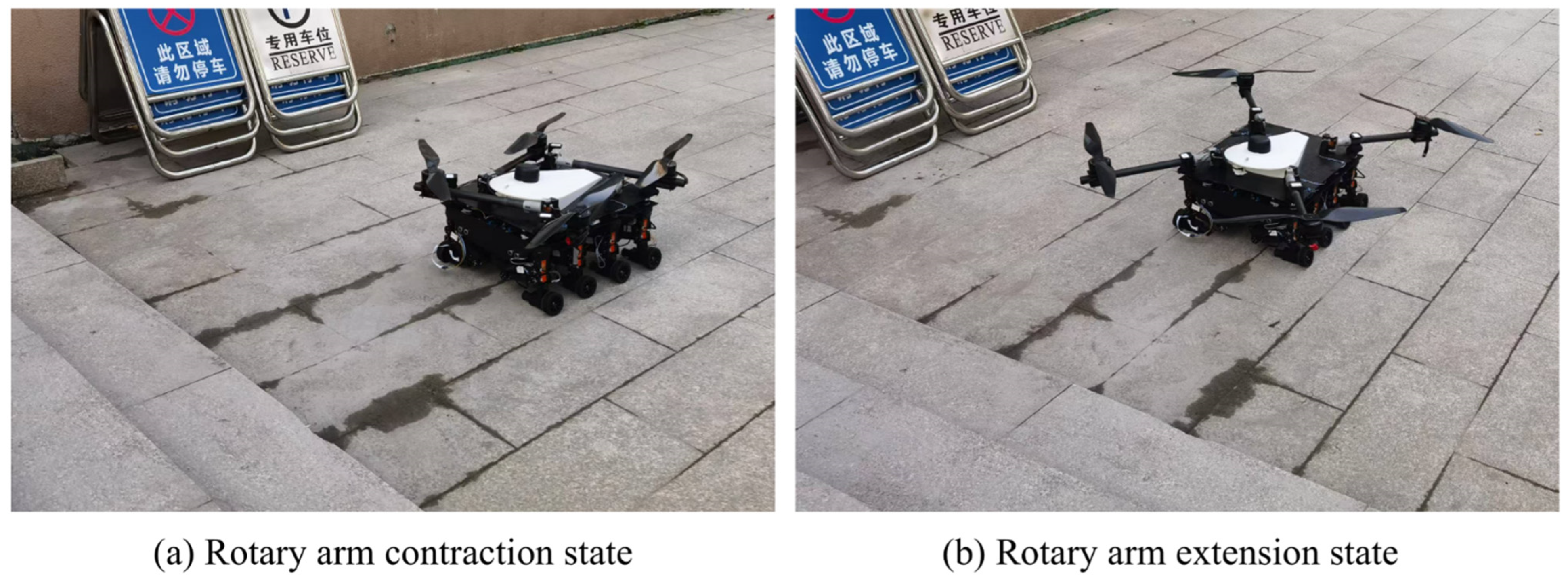
5.4. Flight Attitude
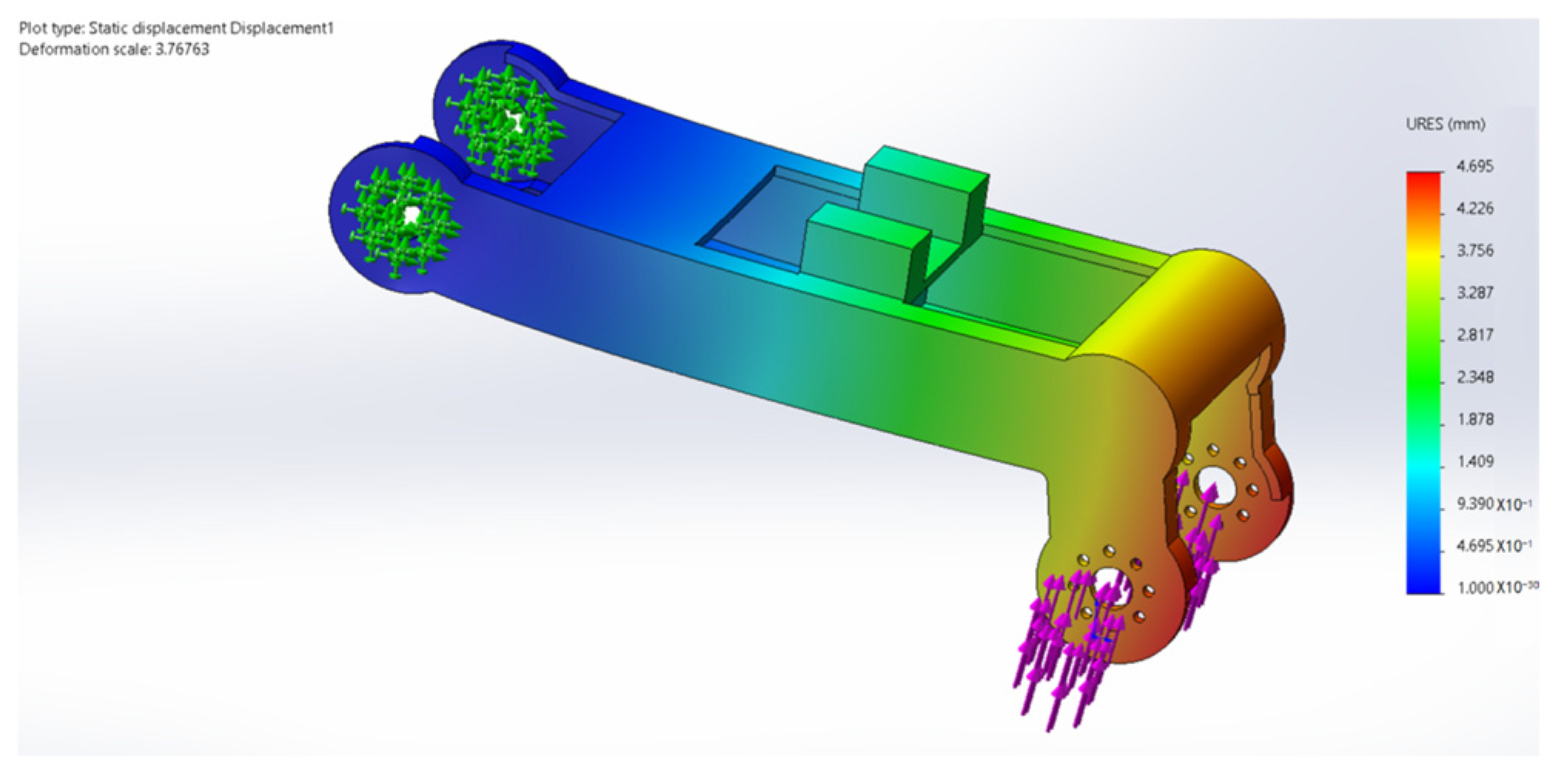
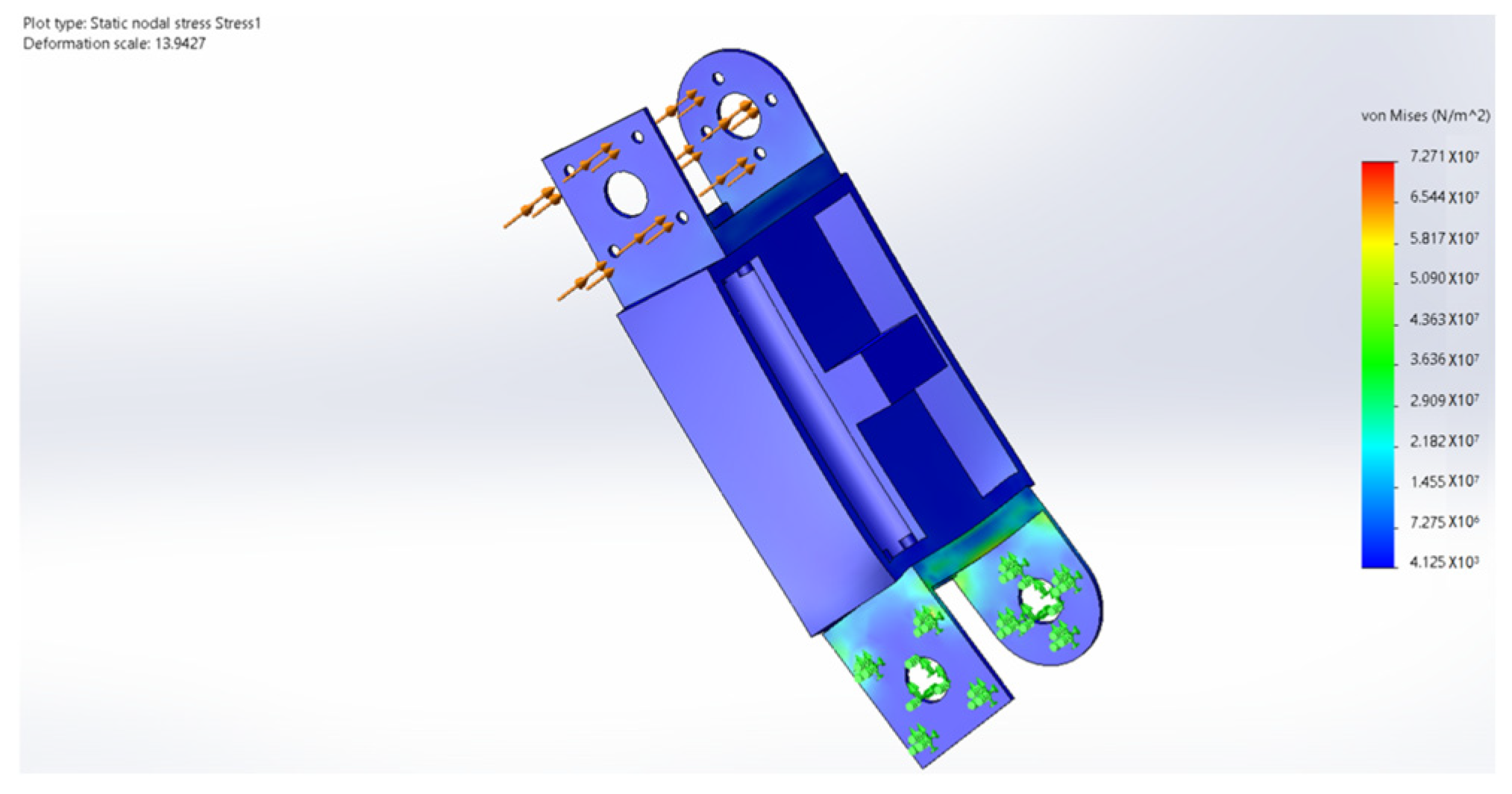
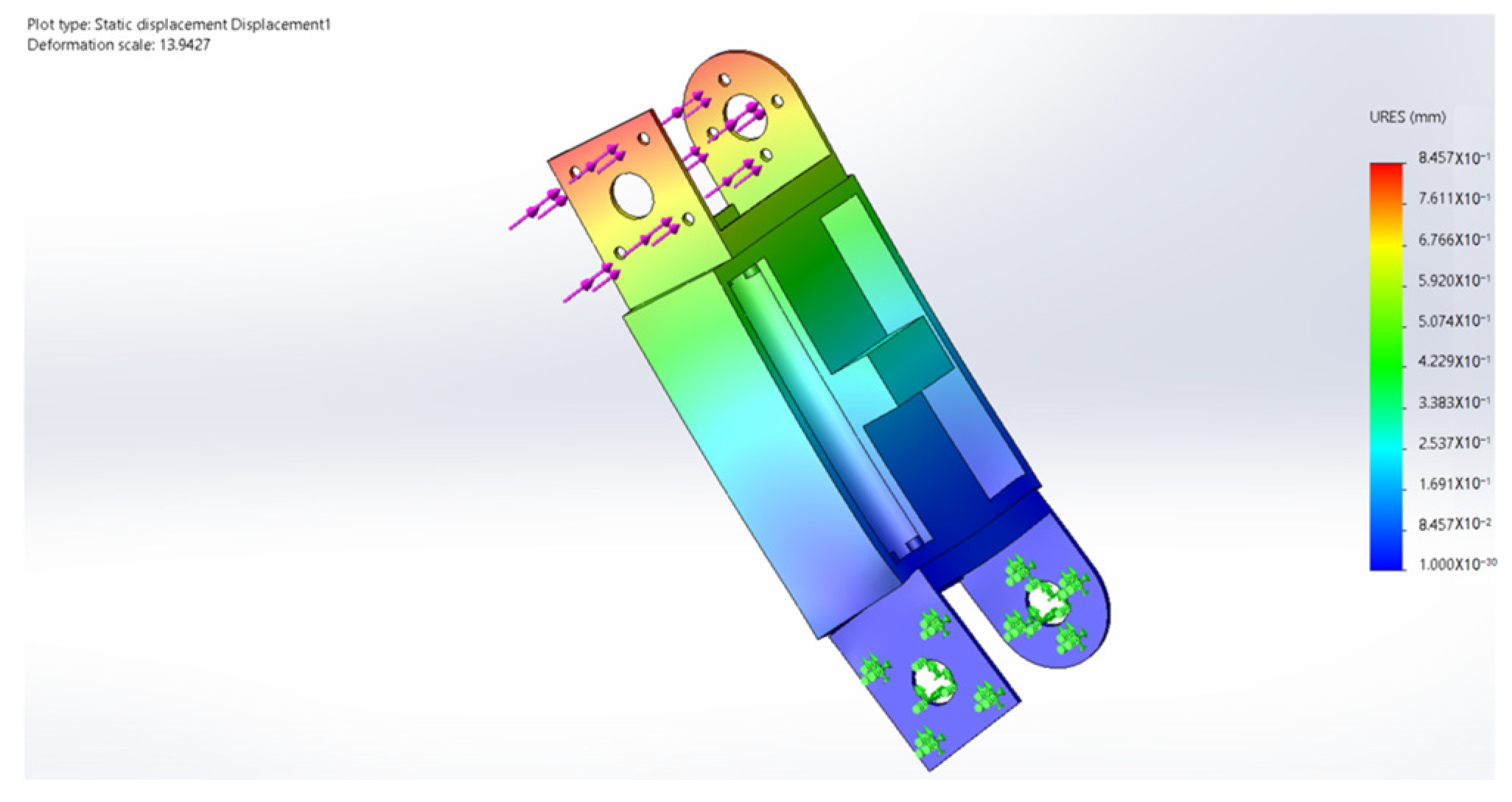
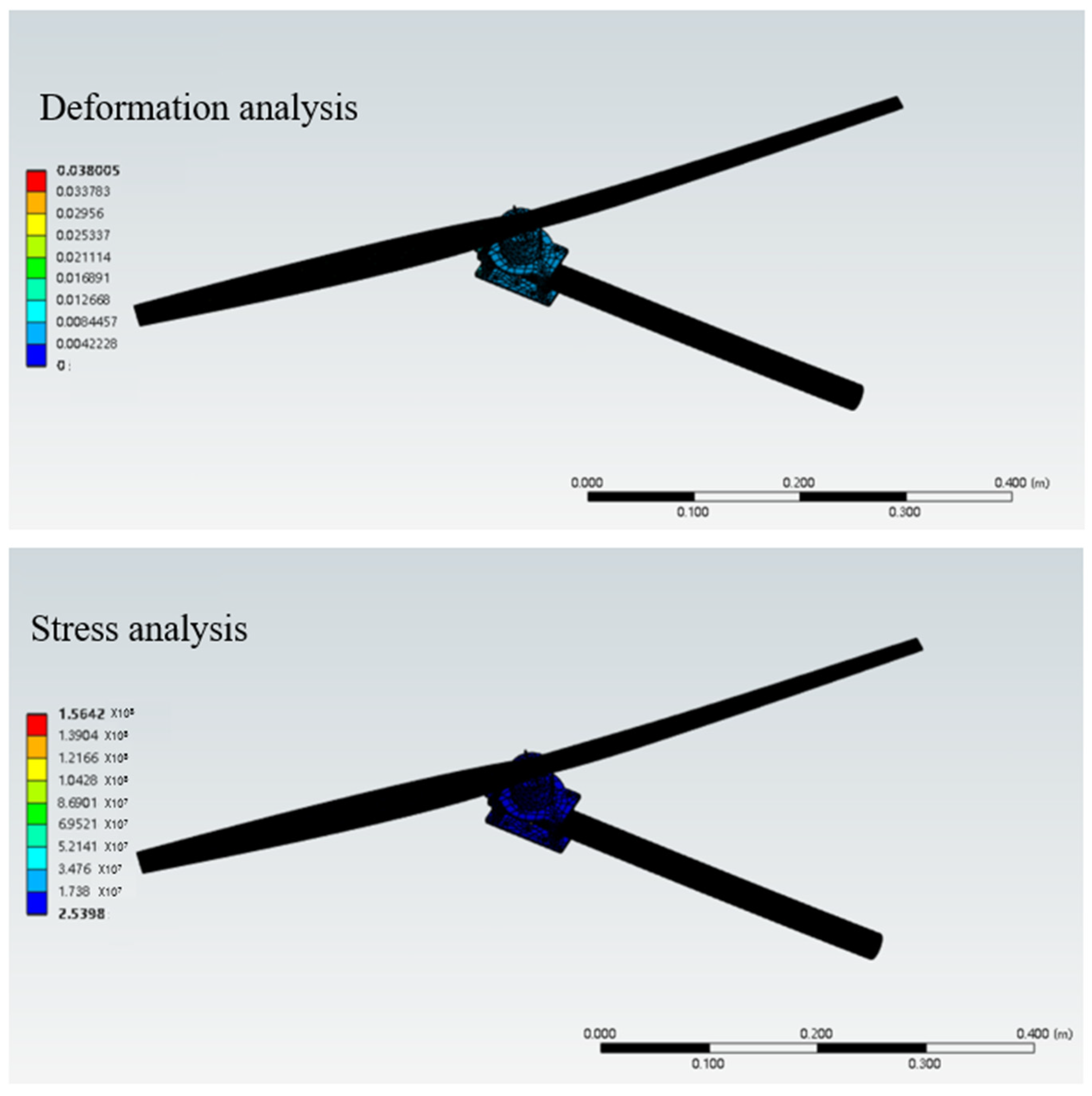
6. Finite Element Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, X. Harnessing Compliance in the Design and Control of Running Robots. Ph.D. Thesis, University of Delaware, Newark, Delaware, USA, 2017. [Google Scholar]
- Xu, K.; Zheng, Y.; Ding, X.L. Structure design and motion mode analysis of a six wheeled-legged robot. J. Beijing Univ. Aeronaut. Astronaut. 2016, 42, 59–71. (In Chinese) [Google Scholar]
- Luneckas, M.; Luneckas, T.; Udris, D.; Plonis, D.; Maskeliunas, R.; Damasevicius, R. Energy-efficient walking over irregular terrain: A case of hexapod robot. Metrol. Meas. Syst. 2019, 26, 645–660. [Google Scholar] [CrossRef]
- Xin, S.; Vijayakumar, S. Online Dynamic Motion Planning and Control for Wheeled Biped Robots. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021. [Google Scholar]
- Zhao, M. System Design and Research of Composite Robots for Water-Land-Air. In Proceedings of the 2024 4th International Conference on Computer, Control and Robotics (ICCCR), Shnaghai, China, 19–21 April 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 264–268. [Google Scholar]
- Gao, J.; Jin, H.; Gao, L.; Zhao, J.; Zhu, Y.; Cai, H. A multimode two-wheel-legged land-air locomotion robot and its cooperative control. IEEE/ASME Trans. Mechatron. 2023, 29, 2557–2568. [Google Scholar] [CrossRef]
- Sihite, E.; Kalantari, A.; Nemovi, R.; Ramezani, A.; Gharib, M. Multi-Modal Mobility Morphobot (M4) with appendage repurposing for locomotion plasticity enhancement. Nat. Commun. 2023, 14, 3323. [Google Scholar] [CrossRef] [PubMed]
- Shi, K.; Jiang, Z.; Ma, L.; Qi, L.; Jin, M. MTABot: An Efficient Morphable Terrestrial-Aerial Robot with Two Transformable Wheels. IEEE Robot. Autom. Lett. 2024, 9, 1875–1882. [Google Scholar] [CrossRef]
- Tedeschi, F.; Carbone, G. Design Issues for Hexapod Walking Robots. Robotics 2014, 3, 181–206. [Google Scholar] [CrossRef]
- Wilcox, B.H. ATHLETE: An Option for Mobile Lunar Landers. In Proceedings of the 2008 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008. [Google Scholar]
- Fujii, S.; Inoue, K.; Takubo, T.; Mae, Y.; Arai, T. Ladder Climbing Control for Limb Mechanism Robot “ASTERISK”. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation (ICRA 2008), Pasadena, CA, USA, 19–23 May 2008; pp. 3052–3057. [Google Scholar]
- Lu, D.; Dong, E.; Liu, C.; Xu, M.; Yang, J. Design and Development of a Leg-Wheel Hybrid robot “HyTRo-I”. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 6031–6036. [Google Scholar]
- Cao, R.; Gu, J.; Yu, C.; Rosendo, A. OmniWheg: An Omnidirectional Wheel-Leg Transformable Robot. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems: IROS 2022, Kyoto, Japan, 23–27 October 2022; pp. 3629–3634. [Google Scholar]
- Klemm, V.; Mannhart, D.; Siegwart, R. Design Optimization of a Four-Bar Leg Linkage for a Legged-Wheeled Balancing Robot. In Robotics in Natural Settings: CLAWAR 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 128–139. [Google Scholar]
- Namgung, J.; Cho, B.K. Legway: Design and Development of a Transformable Wheel-Leg Hybrid Robot. In Proceedings of the 2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids), Austin, TX, USA, 12–14 December 2023; pp. 1–8. [Google Scholar]
- Huang, Z.; Li, X.; Guan, X.; Sun, X.; Wang, C.; Xu, Y. Biomimetic Lightweight Design of Legged Robot Hydraulic Drive Unit Shell Inspired by Geometric Shape of Fish Bone Rib Structure. J. Bionic Eng. 2023, 21, 1238–1252. [Google Scholar] [CrossRef]
- Saab, W.; Rone, W.S.; Ben-Tzvi, P. Robotic Modular Leg: Design, Analysis, and Experimentation. J. Mech. Robot. Trans. ASME 2017, 9, 024501. [Google Scholar] [CrossRef]
- Zhao, F.; Wu, Y.; Yang, X.; Ding, X.; Xu, K.; Guo, S.; Jin, X. Multimode Design and Analysis of an Integrated Leg-Arm Quadruped Robot with Deployable Characteristics. Chin. J. Mech. Eng. 2024, 37, 59. [Google Scholar] [CrossRef]
- Aceituno-Cabezas, B.; Mastalli, C.; Dai, H.; Focchi, M.; Radulescu, A.; Caldwell, D.G.; Cappelletto, J.; Grieco, J.C.; Fernández-López, G.; Semini, C. Simultaneous Contact, Gait and Motion Planning for Robust Multi-Legged Locomotion via Mixed-Integer Convex Optimization. IEEE Robot. Autom. Lett. 2017, 3, 2531–2538. [Google Scholar] [CrossRef]
- Bagheri, H.; Jayanetti, V.; Burch, H.R.; Brenner, C.E.; Bethke, B.R.; Marvi, H. Mechanics of bipedal and quadrupedal locomotion on dry and wet granular media. J. Field Robot. 2023, 40, 161–172. [Google Scholar] [CrossRef]
- Bjelonic, M.; Grandia, R.; Harley, O.; Galliard, C.; Zimmermann, S.; Hutter, M. Whole-Body MPC and Online Gait Sequence Generation for Wheeled-Legged Robots. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 8388–8395. [Google Scholar]
- Ponton, B.; Herzog, A.; Schaal, S.; Righetti, L. A Convex Model of Momentum Dynamics for Multi-Contact Motion Generation. In Proceedings of the 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016; pp. 842–849. [Google Scholar]
- Yeldan, A.; Arora, A.; Soh, G.S. QuadRunner: A Transformable Quasi-Wheel Quadruped. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 4694–4700. [Google Scholar]
- Blair, J.; Iwasaki, T. A further result on the optimal harmonic gait for locomotion of mechanical rectifier systems. In Proceedings of the 2009 American Control Conference (ACC 2009), St. Louis, MO, USA, 10–12 June 2009; pp. 1742–1747. [Google Scholar]
- Liu, X.; Shen, T. Gait analysis and simulation of bionics crab-like robot with ADAMS. Microcomput. Inf. 2011, 27, 215–216. (In Chinese) [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fuselage Width (mm) | Fuselage Height (mm) | Same Row Leg Spacing (mm) | Fuselage Weight (kg) | Overrun Height (mm) |
|---|---|---|---|---|
| 440 | 320 | 150 | 12 | 220 |
| Listings | Numerical Value |
|---|---|
| 195.5 | |
| 204.2 | |
| 106 | |
| 113 | |
| 134 | |
| 142.2 | |
| 142.2 | |
| 100~90 | |
| 60~170 | |
| 80~100 | |
| 80~100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Gao, J.; Bao, M.; Zhai, H.; Pei, X.; Jiang, Z. An Analysis of the Design and Kinematic Characteristics of an Octopedic Land–Air Bionic Robot. Sensors 2025, 25, 4502. https://doi.org/10.3390/s25144502
Zhao J, Gao J, Bao M, Zhai H, Pei X, Jiang Z. An Analysis of the Design and Kinematic Characteristics of an Octopedic Land–Air Bionic Robot. Sensors. 2025; 25(14):4502. https://doi.org/10.3390/s25144502
Chicago/Turabian StyleZhao, Jianwei, Jiaping Gao, Mingsong Bao, Hao Zhai, Xu Pei, and Zheng Jiang. 2025. "An Analysis of the Design and Kinematic Characteristics of an Octopedic Land–Air Bionic Robot" Sensors 25, no. 14: 4502. https://doi.org/10.3390/s25144502
APA StyleZhao, J., Gao, J., Bao, M., Zhai, H., Pei, X., & Jiang, Z. (2025). An Analysis of the Design and Kinematic Characteristics of an Octopedic Land–Air Bionic Robot. Sensors, 25(14), 4502. https://doi.org/10.3390/s25144502